Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Hydraulicturbine 180529101511Documento35 pagineHydraulicturbine 180529101511Muhammad Yasar JavaidNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Centrifugal Pump Definition Components Working Priming Advantages Disadvantages and Applications PDFDocumento7 pagineCentrifugal Pump Definition Components Working Priming Advantages Disadvantages and Applications PDFMuhammad Yasar JavaidNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Introduction To Reciprocating PumpDocumento11 pagineIntroduction To Reciprocating PumpMuhammad Yasar JavaidNessuna valutazione finora
- Pumps Pumps Pumps Pumps Pumps Pumps Pumps Pumps: CHAPTER - 11 11 11 11 11 11 11 11Documento65 paginePumps Pumps Pumps Pumps Pumps Pumps Pumps Pumps: CHAPTER - 11 11 11 11 11 11 11 11Muhammad Yasar JavaidNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Power Plant Technology by El WakilDocumento46 paginePower Plant Technology by El WakilMuhammad Yasar Javaid100% (1)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Introduction To Pump:: Mr. V. R. MuttagiDocumento11 pagineIntroduction To Pump:: Mr. V. R. MuttagiMuhammad Yasar JavaidNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- HeavingDocumento44 pagineHeavingMuhammad Yasar JavaidNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Trimcbcv Calculation Methods For A Dynamical Model of The Remus 100 AUVDocumento56 pagineTrimcbcv Calculation Methods For A Dynamical Model of The Remus 100 AUVMuhammad Yasar JavaidNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- QUOsdcsdTEPLUS MY CMR SMB 29603345.3Documento7 pagineQUOsdcsdTEPLUS MY CMR SMB 29603345.3Muhammad Yasar JavaidNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Design of A New Low Cost ROV VehicleDocumento6 pagineDesign of A New Low Cost ROV VehicleMuhammad Yasar JavaidNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Calculation of Manoeuvring Forces On Submarines Using TwoDocumento13 pagineCalculation of Manoeuvring Forces On Submarines Using TwoMuhammad Yasar Javaid100% (1)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Modeling of The Underwater Airframe - Glider: Alexey V. CherkasovDocumento5 pagineModeling of The Underwater Airframe - Glider: Alexey V. CherkasovMuhammad Yasar JavaidNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- 1962 Gibson Johnny SmithDocumento5 pagine1962 Gibson Johnny SmithLuisNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
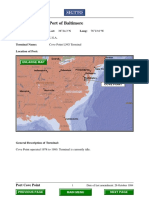
- Port Name: Port of BaltimoreDocumento17 paginePort Name: Port of Baltimoremohd1khairul1anuarNessuna valutazione finora
- SP Essay 1Documento14 pagineSP Essay 1api-511870420Nessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Cambridge IGCSE Paper 2Documento4 pagineCambridge IGCSE Paper 2irajooo epik zizterNessuna valutazione finora
- 41z S4hana2021 Set-Up en XXDocumento46 pagine41z S4hana2021 Set-Up en XXHussain MulthazimNessuna valutazione finora
- Presentation On 4G TechnologyDocumento23 paginePresentation On 4G TechnologyFresh EpicNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Flight Vehicle Design:: Example 2 (Uav)Documento43 pagineFlight Vehicle Design:: Example 2 (Uav)Anmol KumarNessuna valutazione finora
- Arbor APS STT Unit 01 Design Basics 25 Jan2018Documento31 pagineArbor APS STT Unit 01 Design Basics 25 Jan2018masterlinh2008Nessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Astm C892 - 00Documento5 pagineAstm C892 - 00reneeNessuna valutazione finora
- Hydrodynamic Calculation Butterfly Valve (Double Disc)Documento31 pagineHydrodynamic Calculation Butterfly Valve (Double Disc)met-calcNessuna valutazione finora
- Liver: Anatomy & FunctionsDocumento18 pagineLiver: Anatomy & FunctionsDR NARENDRANessuna valutazione finora
- Case Studies of Transportation Public-Private Partnerships Around The WorldDocumento158 pagineCase Studies of Transportation Public-Private Partnerships Around The WorldzhenhuaruiNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Managing Diabetic Foot Ulcers ReadingDocumento21 pagineManaging Diabetic Foot Ulcers Readinghimanshugupta811997Nessuna valutazione finora
- Chapter 7 - Muscular SystemDocumento29 pagineChapter 7 - Muscular SystemlNessuna valutazione finora
- Biology Accel Syllabus 2011-2012Documento3 pagineBiology Accel Syllabus 2011-2012Mike DeleonNessuna valutazione finora
- Sat Vocabulary Lesson and Practice Lesson 5Documento3 pagineSat Vocabulary Lesson and Practice Lesson 5api-430952728Nessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Prestige Institute of Management & Research: Guided By:-Submitted By: - Prof. Arpit Loya Sumeet RattanDocumento21 paginePrestige Institute of Management & Research: Guided By:-Submitted By: - Prof. Arpit Loya Sumeet RattanSumeet700005Nessuna valutazione finora
- Contemporary Philippine Arts From The Regions: Quarter 2 - Module 9 Different Contemporary Art Techniques and PerformanceDocumento25 pagineContemporary Philippine Arts From The Regions: Quarter 2 - Module 9 Different Contemporary Art Techniques and PerformanceGrace06 Labin100% (7)
- EN Manual Lenovo Ideapad S130-14igm S130-11igmDocumento33 pagineEN Manual Lenovo Ideapad S130-14igm S130-11igmDolgoffNessuna valutazione finora
- World's Standard Model G6A!: Low Signal RelayDocumento9 pagineWorld's Standard Model G6A!: Low Signal RelayEgiNessuna valutazione finora
- Lesson 1 Chapter 9 ErosiondepositionDocumento1 paginaLesson 1 Chapter 9 Erosiondepositionapi-249320969Nessuna valutazione finora
- Lecture 12Documento8 pagineLecture 12Mechanical ZombieNessuna valutazione finora
- Assignment 1Documento3 pagineAssignment 1farhang_tNessuna valutazione finora
- 08 Activity 1 (10) (LM)Documento2 pagine08 Activity 1 (10) (LM)Jhanine Mae Oriola FortintoNessuna valutazione finora
- Worksheet Series 5: Answer Any 3 Questions From 1 To 6. (2 Score Each)Documento6 pagineWorksheet Series 5: Answer Any 3 Questions From 1 To 6. (2 Score Each)AswithNessuna valutazione finora
- 2022 Audi e Tron 22Documento318 pagine2022 Audi e Tron 22Alejandro Alberto Robalino MendezNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- PIX4D Simply PowerfulDocumento43 paginePIX4D Simply PowerfulJUAN BAQUERONessuna valutazione finora
- Determination of Drop-Impact Resistance of Plastic BottlesDocumento11 pagineDetermination of Drop-Impact Resistance of Plastic BottlesAndres BrañaNessuna valutazione finora
- The Light Fantastic by Sarah CombsDocumento34 pagineThe Light Fantastic by Sarah CombsCandlewick PressNessuna valutazione finora
- 18 Ray Optics Revision Notes QuizrrDocumento108 pagine18 Ray Optics Revision Notes Quizrraafaf.sdfddfaNessuna valutazione finora