Potrebbero piacerti anche
- Weld Evaluation Guide - RADIOGRAFIA - PDFDocumento20 pagineWeld Evaluation Guide - RADIOGRAFIA - PDFCharly Teodoro BrownNessuna valutazione finora
- Quantitative Analysis of Eddy Current NDE DataDocumento12 pagineQuantitative Analysis of Eddy Current NDE DataAlvaro Alexis Mendoza PradaNessuna valutazione finora
- Advanced Process and Quality Control in Hot Rolling Mills Using Eddy Current InspectionDocumento9 pagineAdvanced Process and Quality Control in Hot Rolling Mills Using Eddy Current InspectionAsiriHemanthaNessuna valutazione finora
- Advanced Process and Quality Control in Hot Rolling Mills Using Eddy Current InspectionDocumento9 pagineAdvanced Process and Quality Control in Hot Rolling Mills Using Eddy Current InspectionAsiriHemanthaNessuna valutazione finora
- Eectromagnetic Nondestructive Evaluation PDFDocumento321 pagineEectromagnetic Nondestructive Evaluation PDFKalai VananNessuna valutazione finora
- Inspeccion Por RadiografiaDocumento9 pagineInspeccion Por RadiografiaAlvaro Alexis Mendoza PradaNessuna valutazione finora
- Weld Seam Inspection of Thick Wall Austenitic Steel Tubes BeyondDocumento8 pagineWeld Seam Inspection of Thick Wall Austenitic Steel Tubes BeyondAlvaro Alexis Mendoza PradaNessuna valutazione finora
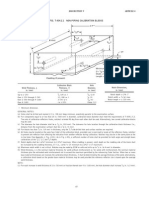
- FIG. 1 Rectangular Tension Test SpecimensDocumento1 paginaFIG. 1 Rectangular Tension Test SpecimensAlvaro Alexis Mendoza PradaNessuna valutazione finora
- Post Weld Heat TreatmentDocumento2 paginePost Weld Heat TreatmentgullenariNessuna valutazione finora
- Quantitative Analysis of Eddy Current NDE DataDocumento12 pagineQuantitative Analysis of Eddy Current NDE DataAlvaro Alexis Mendoza PradaNessuna valutazione finora
- 560-000-PI-T-001 Rev.1Documento1 pagina560-000-PI-T-001 Rev.1Alvaro Alexis Mendoza PradaNessuna valutazione finora
- Epp y Equipos SoldaduraDocumento100 pagineEpp y Equipos SoldaduraAlvaro Alexis Mendoza PradaNessuna valutazione finora
- Ensuring Weld Quality in Structural Applications: by Duane K. Miller, SC.D., P.EDocumento16 pagineEnsuring Weld Quality in Structural Applications: by Duane K. Miller, SC.D., P.Ecentaury2013Nessuna valutazione finora
- Weld Seam Inspection of Thick Wall Austenitic Steel Tubes BeyondDocumento8 pagineWeld Seam Inspection of Thick Wall Austenitic Steel Tubes BeyondAlvaro Alexis Mendoza PradaNessuna valutazione finora
- BLOQUEDocumento1 paginaBLOQUEAlvaro Alexis Mendoza PradaNessuna valutazione finora
- Steam Generator Inspections Faster, Cheaper and BetterDocumento17 pagineSteam Generator Inspections Faster, Cheaper and BetterAlvaro Alexis Mendoza PradaNessuna valutazione finora
- Advanced Process and Quality Control in Hot Rolling Mills Using Eddy Current InspectionDocumento9 pagineAdvanced Process and Quality Control in Hot Rolling Mills Using Eddy Current InspectionAsiriHemanthaNessuna valutazione finora
- ISO AwarenessDocumento9 pagineISO AwarenessAlvaro Alexis Mendoza PradaNessuna valutazione finora
- PA Probe Catalog en 201308Documento24 paginePA Probe Catalog en 201308Alvaro Alexis Mendoza PradaNessuna valutazione finora
- Quantitative Analysis of Eddy Current NDE DataDocumento12 pagineQuantitative Analysis of Eddy Current NDE DataAlvaro Alexis Mendoza PradaNessuna valutazione finora
- Evolution of NDT Personnel Qualification and Certification atDocumento4 pagineEvolution of NDT Personnel Qualification and Certification atAlvaro Alexis Mendoza PradaNessuna valutazione finora
- Pana UT EN 201301Documento52 paginePana UT EN 201301k_sakpolachet_heartNessuna valutazione finora
- Aisi and Aisc StandardDocumento11 pagineAisi and Aisc StandardkonstruktorbudowlanyNessuna valutazione finora
- UT Technotes 2011.enDocumento11 pagineUT Technotes 2011.enAlexandru StefanNessuna valutazione finora
- MPI Y-7 ACDC Yoke InstructionsDocumento3 pagineMPI Y-7 ACDC Yoke InstructionsAlvaro Alexis Mendoza PradaNessuna valutazione finora
- K-Series Final 030911Documento54 pagineK-Series Final 030911Alvaro Alexis Mendoza PradaNessuna valutazione finora
- Steel Tapping Screws For Cold-Formed Steel Framing ConnectionsDocumento5 pagineSteel Tapping Screws For Cold-Formed Steel Framing ConnectionsAlvaro Alexis Mendoza PradaNessuna valutazione finora
- D 10.11Documento20 pagineD 10.11Alvaro Alexis Mendoza PradaNessuna valutazione finora
- European Welding New-StandardsDocumento39 pagineEuropean Welding New-StandardsJOECOOL67100% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Lab 4 Electric PotentialDocumento4 pagineLab 4 Electric PotentialJorge Tenorio0% (1)
- Mathematics: Checkyour Grasp Exercise-IDocumento8 pagineMathematics: Checkyour Grasp Exercise-IDikshant AsutkarNessuna valutazione finora
- Counterpropagation NetworksDocumento6 pagineCounterpropagation NetworksshardapatelNessuna valutazione finora
- Xercise: Single Correct (Objective Questions)Documento16 pagineXercise: Single Correct (Objective Questions)Adharshan NNessuna valutazione finora
- CH 3 Measures of Central TendencyDocumento8 pagineCH 3 Measures of Central TendencyGulshad KhanNessuna valutazione finora
- Cluster 4Documento34 pagineCluster 4Gary SNessuna valutazione finora
- Shaun HO: TutorDocumento19 pagineShaun HO: TutorKate TongNessuna valutazione finora
- Assignment 6 Real Analysis Iit GDocumento1 paginaAssignment 6 Real Analysis Iit GGautam BorahNessuna valutazione finora
- D DX X X D DX X T D DX T: Antiderivative of A FunctionDocumento1 paginaD DX X X D DX X T D DX T: Antiderivative of A FunctionCherry Pye TerradoNessuna valutazione finora
- Math Vocabulary PreKDocumento3 pagineMath Vocabulary PreKlittlegus100% (3)
- 11 Dimensions: ST THDocumento2 pagine11 Dimensions: ST THWendell de GuzmanNessuna valutazione finora
- Stackoverflow ComDocumento14 pagineStackoverflow ComKosma KosmicNessuna valutazione finora
- RealanalDocumento282 pagineRealanalEsteban SalasNessuna valutazione finora
- June 2004 CAPE Pure Mathematics U2 Specimen and SolutionDocumento42 pagineJune 2004 CAPE Pure Mathematics U2 Specimen and SolutionKyle YearwoodNessuna valutazione finora
- Num MethodsDocumento36 pagineNum MethodsRobertBellarmineNessuna valutazione finora
- Discrete Control SystemsDocumento4 pagineDiscrete Control SystemsVijay PrabhuNessuna valutazione finora
- Laplace Transforms: Left LFTDocumento1 paginaLaplace Transforms: Left LFTCarlos Miguel DacaimatNessuna valutazione finora
- Planning and Search: Classical Planning: Planning Graphs, GraphplanDocumento22 paginePlanning and Search: Classical Planning: Planning Graphs, GraphplanthillaiNessuna valutazione finora
- Ujian Bulanan 1 2020Documento6 pagineUjian Bulanan 1 2020Helmi TarmiziNessuna valutazione finora
- Trigonometric Equation: Solved ExampleDocumento32 pagineTrigonometric Equation: Solved Example10x RiderNessuna valutazione finora
- R1.6 Scientific Notation Review ANSWERSDocumento8 pagineR1.6 Scientific Notation Review ANSWERSNavam S PakianathanNessuna valutazione finora
- 1 s2.0 S1270963809001060 Main PDFDocumento4 pagine1 s2.0 S1270963809001060 Main PDFali_raza117Nessuna valutazione finora
- Chapter 13 TestDocumento7 pagineChapter 13 TestKloe-Rose LemmonNessuna valutazione finora
- 2018 Book IntroductoryQuantumMechanicsDocumento641 pagine2018 Book IntroductoryQuantumMechanicsAlfangNessuna valutazione finora
- Program Logic FormulationDocumento57 pagineProgram Logic Formulationアテンヂド 彩92% (12)
- 2.7 - Gauss Divergence TheoremDocumento44 pagine2.7 - Gauss Divergence TheoremindraNessuna valutazione finora
- Infosys Practice Questions 2018Documento160 pagineInfosys Practice Questions 2018Ganesh100% (1)
- On Symmetric Bi-Generalized Derivations of Incline AlgebrasDocumento9 pagineOn Symmetric Bi-Generalized Derivations of Incline AlgebrasAnonymous 8hSWcBpNessuna valutazione finora
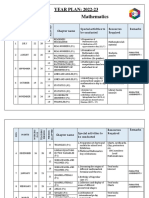
- 9th Class Annual Plan Final With Lesson PlanDocumento7 pagine9th Class Annual Plan Final With Lesson PlanAchanta PrakashNessuna valutazione finora
- Mat FinalDocumento7 pagineMat Finalsanathhegde2018Nessuna valutazione finora