Potrebbero piacerti anche
- Citeseerx - Ist.psu - Edu Viewdoc Download Doi 10.1.1.67Documento6 pagineCiteseerx - Ist.psu - Edu Viewdoc Download Doi 10.1.1.67Be U KimNessuna valutazione finora
- Path Computation For Incoming Interface Multipath Routing: Mérindol Pascal, Pansiot Jean-Jacques, Cateloin StéphaneDocumento11 paginePath Computation For Incoming Interface Multipath Routing: Mérindol Pascal, Pansiot Jean-Jacques, Cateloin Stéphanecrana10Nessuna valutazione finora
- Fast Congestion Estimator For Routing With Bounded Detours: Lerong Cheng' Xiaoyu Song' Yang' Zhiwei Tang'Documento5 pagineFast Congestion Estimator For Routing With Bounded Detours: Lerong Cheng' Xiaoyu Song' Yang' Zhiwei Tang'gowripNessuna valutazione finora
- Fixed-Point Approximations For TCP Performance Over Bandwidth On Demand GEO Satellite LinksDocumento6 pagineFixed-Point Approximations For TCP Performance Over Bandwidth On Demand GEO Satellite LinkskirkbdavisNessuna valutazione finora
- Matrix Transpose On Meshes: Theory and PracticeDocumento5 pagineMatrix Transpose On Meshes: Theory and PracticeshashankNessuna valutazione finora
- Global State Routing 1Documento5 pagineGlobal State Routing 1govindvermaNessuna valutazione finora
- Deviation Algorithms For Ranking Shortest PathsDocumento17 pagineDeviation Algorithms For Ranking Shortest PathsDivyanshu ShuklaNessuna valutazione finora
- VOIPDocumento5 pagineVOIPFatima KhalilNessuna valutazione finora
- The Multi-Commodity Network Flow ProblemDocumento2 pagineThe Multi-Commodity Network Flow ProblemStephen HartantoNessuna valutazione finora
- Compression of RDsDocumento7 pagineCompression of RDsmadan321Nessuna valutazione finora
- A Bilevel Model of Taxation and Its Application To Optimal Pricing of Congested HighwaysDocumento6 pagineA Bilevel Model of Taxation and Its Application To Optimal Pricing of Congested HighwaysshotorbariNessuna valutazione finora
- Scaling and Correlations in Three Bustransport Networks of China, X Xu, 2007Documento9 pagineScaling and Correlations in Three Bustransport Networks of China, X Xu, 2007garidosebastNessuna valutazione finora
- CurveDocumento34 pagineCurvezpa5408Nessuna valutazione finora
- Problem Set 1Documento6 pagineProblem Set 1AnushaNessuna valutazione finora
- Alternatives To Dial'S Logit Assignment Algorithm: PergamonDocumento9 pagineAlternatives To Dial'S Logit Assignment Algorithm: PergamonPagon SriraksaNessuna valutazione finora
- K-Shortest Paths ProblemDocumento14 pagineK-Shortest Paths ProblemSimranjit KohliNessuna valutazione finora
- Bicriteria Rectilinear Shortest Paths Among Rectilinear Obstacles in The PlaneDocumento58 pagineBicriteria Rectilinear Shortest Paths Among Rectilinear Obstacles in The PlaneNicolas BeltranNessuna valutazione finora
- Topology of Evolving Networks: Local Events and UniversalityDocumento13 pagineTopology of Evolving Networks: Local Events and UniversalityMarcus Túlio PinheiroNessuna valutazione finora
- Feedback Arc SetDocumento8 pagineFeedback Arc SetLaksNessuna valutazione finora
- 52 GLTMandDUE (DTA2008)Documento22 pagine52 GLTMandDUE (DTA2008)guido gentileNessuna valutazione finora
- Load Balancing and Switch Scheduling: Xiangheng Liu Andrea GoldsmithDocumento6 pagineLoad Balancing and Switch Scheduling: Xiangheng Liu Andrea GoldsmithNikhin Perumal ThomasNessuna valutazione finora
- Collected Journal (Google)Documento23 pagineCollected Journal (Google)Rajib KarmakarNessuna valutazione finora
- Active Queue Management - A Router Based Control MechanismDocumento11 pagineActive Queue Management - A Router Based Control MechanismTanvi SharmaNessuna valutazione finora
- K Skip Sigmod11Documento12 pagineK Skip Sigmod11Lowry GuettaNessuna valutazione finora
- Yen's AlgorithmDocumento6 pagineYen's AlgorithmhanniballectorNessuna valutazione finora
- Resource Allocation With Subcarrier Pairing in OFDMA Two-Way Relay NetworksDocumento4 pagineResource Allocation With Subcarrier Pairing in OFDMA Two-Way Relay NetworksSalman ShahNessuna valutazione finora
- Network Design For OSPF Routing: Abstract. Internet Protocol (IP) Traffic Follows Rules Established by Routing ProDocumento5 pagineNetwork Design For OSPF Routing: Abstract. Internet Protocol (IP) Traffic Follows Rules Established by Routing ProgynxNessuna valutazione finora
- Fast Parallel Algorithms For Testing K-Connectivity of Directed and Undirected GraphsDocumento5 pagineFast Parallel Algorithms For Testing K-Connectivity of Directed and Undirected GraphsYakov AbramsNessuna valutazione finora
- An Exact Algorithm For The Robust Shortest Path Problem With Interval DataDocumento21 pagineAn Exact Algorithm For The Robust Shortest Path Problem With Interval DataMeisam BagheriNessuna valutazione finora
- Multibranch Forging Algorithms: Tails Switching Effect and Chain MeasuresDocumento15 pagineMultibranch Forging Algorithms: Tails Switching Effect and Chain MeasuresandruimanNessuna valutazione finora
- Outage Probability and Power Allocation For Two-Way DF Relay Networks With Relay SelectionDocumento7 pagineOutage Probability and Power Allocation For Two-Way DF Relay Networks With Relay SelectionballmerNessuna valutazione finora
- Load Balancing in WDM Networks Through Adaptive Routing Table ChangesDocumento12 pagineLoad Balancing in WDM Networks Through Adaptive Routing Table ChangesKarthi KeyanNessuna valutazione finora
- Thnsistor Sizing For Minimization of Energy-Delay ProductDocumento6 pagineThnsistor Sizing For Minimization of Energy-Delay Productdxtry123Nessuna valutazione finora
- Chapter 3 Network Flow Problems: Optimization 3A GiDocumento11 pagineChapter 3 Network Flow Problems: Optimization 3A GiMziou HammadiNessuna valutazione finora
- Modeling Congested Internet Connections: Fer.) We Also Assume That The Path Is Fixed, The Transfer IsDocumento6 pagineModeling Congested Internet Connections: Fer.) We Also Assume That The Path Is Fixed, The Transfer IsLilika BandeiraNessuna valutazione finora
- A Randomized Algorithm For Finding A Path Subject To Multiple Qos ConstraintsDocumento16 pagineA Randomized Algorithm For Finding A Path Subject To Multiple Qos ConstraintsAbir ChakrabortyNessuna valutazione finora
- Fleischer MREPDocumento9 pagineFleischer MREPivanNessuna valutazione finora
- Tonika Routing AlgorithmDocumento21 pagineTonika Routing Algorithmanon_206920Nessuna valutazione finora
- Contraction of Timetable Networks With Realistic Transfers: Geisberger@kit - EduDocumento26 pagineContraction of Timetable Networks With Realistic Transfers: Geisberger@kit - Edumadan321Nessuna valutazione finora
- 52 GLTMandDUE (DTA2008)Documento17 pagine52 GLTMandDUE (DTA2008)guido gentileNessuna valutazione finora
- Optimization Method of Spanning Tree Aggregation For Hierarchical Qos RoutingDocumento5 pagineOptimization Method of Spanning Tree Aggregation For Hierarchical Qos RoutingosjuroNessuna valutazione finora
- Random Walks On Complex Networks: Department of Physics, Chungnam National University, Daejeon 305-764, KoreaDocumento4 pagineRandom Walks On Complex Networks: Department of Physics, Chungnam National University, Daejeon 305-764, KoreaPaolo MessinaNessuna valutazione finora
- Unit-Iii: (Q) Explain Network Layer Design Issues? (2M/5M)Documento28 pagineUnit-Iii: (Q) Explain Network Layer Design Issues? (2M/5M)karthik vaddiNessuna valutazione finora
- 2012 Liviu P. Dinu, Alexandru Popa, 2012. On The Closest String Via Rank DistanceDocumento14 pagine2012 Liviu P. Dinu, Alexandru Popa, 2012. On The Closest String Via Rank DistanceaNessuna valutazione finora
- Optimal Communication Algorithms For Hypercubes : Journal of Parallel and Distributed Computing 11, 263-275 (1991)Documento13 pagineOptimal Communication Algorithms For Hypercubes : Journal of Parallel and Distributed Computing 11, 263-275 (1991)Anonymous RrGVQjNessuna valutazione finora
- Yen KTH Shortest PathDocumento6 pagineYen KTH Shortest PathalamkhanNessuna valutazione finora
- Zs 2010 19 ChinacomDocumento7 pagineZs 2010 19 ChinacomkonenianithaNessuna valutazione finora
- Cross-Layer Design For Energy Conservation in Wireless Sensor NetworksDocumento6 pagineCross-Layer Design For Energy Conservation in Wireless Sensor NetworksHoang Trong MinhNessuna valutazione finora
- Free From A Shortest PathDocumento5 pagineFree From A Shortest Pathjanaki_wanigasooriyaNessuna valutazione finora
- Moment Models of General Transmission Lines With Application To Interconnect Analysis and OptimizationDocumento37 pagineMoment Models of General Transmission Lines With Application To Interconnect Analysis and Optimizationavishek2byNessuna valutazione finora
- Concepts of Exact Qos Routing Algorithms: Piet Van Mieghem and Fernando A. Kuipers, Student Member, IeeeDocumento14 pagineConcepts of Exact Qos Routing Algorithms: Piet Van Mieghem and Fernando A. Kuipers, Student Member, IeeeAlma HrustanovicNessuna valutazione finora
- Telecom SubmitDocumento23 pagineTelecom SubmiteugeneNessuna valutazione finora
- Time Table Ch2Documento16 pagineTime Table Ch2madan321Nessuna valutazione finora
- Routing and Wavelength Assignment in All-Optical NetworksDocumento12 pagineRouting and Wavelength Assignment in All-Optical NetworksGaru RuRuNessuna valutazione finora
- A Note On The Maximum Flow Through A NetworkDocumento3 pagineA Note On The Maximum Flow Through A NetworkcastrojpNessuna valutazione finora
- Route Finding: InputDocumento2 pagineRoute Finding: InputHello misterNessuna valutazione finora
- Algoritmo de YenDocumento6 pagineAlgoritmo de Yenromano7187Nessuna valutazione finora
- Ttthesis08 PsDocumento3 pagineTtthesis08 Pspunjan63Nessuna valutazione finora
- Reviews in Computational Chemistry, Volume 31Da EverandReviews in Computational Chemistry, Volume 31Abby L. ParrillNessuna valutazione finora
- Blocked PermantelyDocumento1 paginaBlocked PermantelyBe U KimNessuna valutazione finora
- Dung Wireless Card Tren May Tinh Lam Access PointDocumento10 pagineDung Wireless Card Tren May Tinh Lam Access PointBe U KimNessuna valutazione finora
- Lab 003 - Configuring VTP Clients and Servers On Catalyst SwitchesDocumento2 pagineLab 003 - Configuring VTP Clients and Servers On Catalyst SwitchesBe U KimNessuna valutazione finora
- Higher Algebra - Hall & KnightDocumento593 pagineHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Engineering Economics: Ali SalmanDocumento11 pagineEngineering Economics: Ali SalmanAli Haider RizviNessuna valutazione finora
- Microsoft Excel Beginner'S Tutorial: Parts of The SheetDocumento10 pagineMicrosoft Excel Beginner'S Tutorial: Parts of The Sheetdenmark de veraNessuna valutazione finora
- PMP Exam Cram Test BankDocumento260 paginePMP Exam Cram Test Bankmuro562001100% (2)
- Sigma Plot UserguideDocumento526 pagineSigma Plot UserguideCleber JadoskiNessuna valutazione finora
- Lab#1 Implementation of Logic Gates: ObjectiveDocumento3 pagineLab#1 Implementation of Logic Gates: ObjectivequreshiNessuna valutazione finora
- Chapter 4 Circuit - Theorems PDFDocumento56 pagineChapter 4 Circuit - Theorems PDFHafzal GaniNessuna valutazione finora
- Expense QuotasDocumento3 pagineExpense QuotasabhiNessuna valutazione finora
- Mathematics: Quarter 2 - Module 11: Dividing Decimal With Up To 2 Decimal PlacesDocumento9 pagineMathematics: Quarter 2 - Module 11: Dividing Decimal With Up To 2 Decimal PlaceszytwnklNessuna valutazione finora
- Immediate InferenceDocumento56 pagineImmediate InferenceEdgardoNessuna valutazione finora
- Python Programming Lab Manual: 1. Write A Program To Demonstrate Different Number Datatypes in PythonDocumento22 paginePython Programming Lab Manual: 1. Write A Program To Demonstrate Different Number Datatypes in PythonNaresh Babu100% (1)
- CAPE Pure Math P1 2008-2020Documento117 pagineCAPE Pure Math P1 2008-2020Leah CassieNessuna valutazione finora
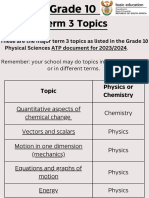
- Grade 10 Term 3 TopicsDocumento10 pagineGrade 10 Term 3 TopicsOwamiirh RsaNessuna valutazione finora
- Neural Networks and Deep LearningDocumento36 pagineNeural Networks and Deep LearningAmir ForsNessuna valutazione finora
- ChassisDocumento1 paginaChassisariboroNessuna valutazione finora
- A Handbook of Mathematical Mode - Dr. Ranja SarkerDocumento232 pagineA Handbook of Mathematical Mode - Dr. Ranja SarkerJohn100% (1)
- A Tutorial On Differential Evolution With Python - Pablo R. MierDocumento21 pagineA Tutorial On Differential Evolution With Python - Pablo R. MierNeel GhoshNessuna valutazione finora
- 8 Math Eng PP 2023 24 1Documento7 pagine8 Math Eng PP 2023 24 1aamirneyazi12Nessuna valutazione finora
- Technical PlacementDocumento50 pagineTechnical PlacementSaumya SinghNessuna valutazione finora
- Polygon ClippingDocumento25 paginePolygon ClippingSahil Gupta50% (2)
- 2 Bit Full AdderDocumento21 pagine2 Bit Full AdderSilvestre VásquezNessuna valutazione finora
- Montessori Constructive Triangle Command CardsDocumento5 pagineMontessori Constructive Triangle Command CardsJennifer Norman Oliver100% (2)
- First Page PDFDocumento1 paginaFirst Page PDFVenkata DeekshitNessuna valutazione finora
- Discrete Maths 103 124Documento22 pagineDiscrete Maths 103 124Bamdeb DeyNessuna valutazione finora
- HypotestDocumento14 pagineHypotestMadhukar SamathamNessuna valutazione finora
- Game Theory and Business Strategy: Individual Assignment 2Documento2 pagineGame Theory and Business Strategy: Individual Assignment 2PKNessuna valutazione finora
- Answer:: Activity in StatisticsDocumento3 pagineAnswer:: Activity in StatisticsRovz GC BinNessuna valutazione finora
- CBSE Class 12 Physics Alternating Current NotesDocumento84 pagineCBSE Class 12 Physics Alternating Current NotesSanikaa MadhuNessuna valutazione finora
- Trigonometric Equation: Solved ExampleDocumento32 pagineTrigonometric Equation: Solved Example10x RiderNessuna valutazione finora
- ME 2213 (Inertia Forces in Reciprocating Parts) (1) (2 Files Merged)Documento53 pagineME 2213 (Inertia Forces in Reciprocating Parts) (1) (2 Files Merged)tanvir2013004Nessuna valutazione finora