Potrebbero piacerti anche
- Cordon de Soldadura Con INVENTORDocumento27 pagineCordon de Soldadura Con INVENTORGeorge Brandon HaparcoNessuna valutazione finora
- Soldadora Mig MagDocumento10 pagineSoldadora Mig MagYurka Yurkka100% (1)
- Ejemplo de Cálculos Prácticos en Una Vivienda Unifamiliar # 1Documento4 pagineEjemplo de Cálculos Prácticos en Una Vivienda Unifamiliar # 1Melsar MoralesNessuna valutazione finora
- MD5075x PDFDocumento2 pagineMD5075x PDFMarco CornelioNessuna valutazione finora
- Información Básica:: Uso de AWS B2.1: Especificación para El Procedimiento de Soldadura y La Calificación Del RendimientoDocumento2 pagineInformación Básica:: Uso de AWS B2.1: Especificación para El Procedimiento de Soldadura y La Calificación Del RendimientoRONALNessuna valutazione finora
- Criterios de semejanza en turbomáquinas: resolución de problemas de modeladoDocumento6 pagineCriterios de semejanza en turbomáquinas: resolución de problemas de modeladojuancarlosjuaquinNessuna valutazione finora
- Valvulas LogicasDocumento25 pagineValvulas LogicasUrza GonzalezNessuna valutazione finora
- Diseño Electromecanico de Una Maquina de TraccionDocumento21 pagineDiseño Electromecanico de Una Maquina de TraccioncazerNessuna valutazione finora
- Memoria de Calculo Grupo ElectrogenoDocumento7 pagineMemoria de Calculo Grupo ElectrogenoaugmorelopezNessuna valutazione finora
- Preguntas Soldadura Tecno II 35 41 47Documento3 paginePreguntas Soldadura Tecno II 35 41 47Rodrigo Gutierrez ArévaloNessuna valutazione finora
- Maquina EstribadoraDocumento17 pagineMaquina EstribadoraJesus Daniel Olivos Medina100% (1)
- Informe Tecnico de Grua GroverDocumento2 pagineInforme Tecnico de Grua GroverFreddyNessuna valutazione finora
- Adira GuimadiraDocumento2 pagineAdira GuimadiraJohan SneiderNessuna valutazione finora
- Trabajo Final Certificacion Iec 60364 PDFDocumento60 pagineTrabajo Final Certificacion Iec 60364 PDFWilmar Angulo RiveraNessuna valutazione finora
- Excel de EngranajeDocumento2 pagineExcel de EngranajeCristian NietoNessuna valutazione finora
- AST D-SED 007 Montaje de Estructuras para Subestaciones Aéreas (Sap, Sam y Pmi)Documento5 pagineAST D-SED 007 Montaje de Estructuras para Subestaciones Aéreas (Sap, Sam y Pmi)edinm25Nessuna valutazione finora
- Fichas Técnicas Cable Acero GalvDocumento3 pagineFichas Técnicas Cable Acero GalvVeronica BrittNessuna valutazione finora
- Diseño de máquinas Senati fascículo dibujo técnicoDocumento46 pagineDiseño de máquinas Senati fascículo dibujo técnicoJonathanNessuna valutazione finora
- Diseño Del Guinche Tipo Pluma: IntengrantesDocumento80 pagineDiseño Del Guinche Tipo Pluma: IntengrantesBEIMAR PEÑA FUENTESNessuna valutazione finora
- H01.02.02.01 - PR - 079 Pruebas A Motores Electricos Off Line (v01)Documento9 pagineH01.02.02.01 - PR - 079 Pruebas A Motores Electricos Off Line (v01)Alfredo ManzanoNessuna valutazione finora
- Utp 86 FNDocumento1 paginaUtp 86 FNEduardoCastilloNessuna valutazione finora
- Super Recia 600 DCDocumento1 paginaSuper Recia 600 DCWilfredoNessuna valutazione finora
- Construcción de Una Grúa Portátil para Levantar Una Carga de 4,91KNDocumento18 pagineConstrucción de Una Grúa Portátil para Levantar Una Carga de 4,91KNBRIAN JESUS TORRES BRIONESNessuna valutazione finora
- Procedimiento de seguridad para izaje de cargasDocumento6 pagineProcedimiento de seguridad para izaje de cargasCesar ZapataNessuna valutazione finora
- 01-Soldadura TIG - Uniones A Tope 1Documento11 pagine01-Soldadura TIG - Uniones A Tope 1Mario TintaNessuna valutazione finora
- Calibre y Caida de TencionDocumento4 pagineCalibre y Caida de TencionAbel CoronelNessuna valutazione finora
- ODM-FM-018-V3 Formato de Acta de Entrega y Recibo de Vehiculos Maquinaria y EquiposDocumento12 pagineODM-FM-018-V3 Formato de Acta de Entrega y Recibo de Vehiculos Maquinaria y EquiposMarcel Foshino Osorio PerezNessuna valutazione finora
- Plano Rueda de CarroDocumento1 paginaPlano Rueda de CarroBrandon TitoNessuna valutazione finora
- Soldaduras A Tope y de FileteDocumento32 pagineSoldaduras A Tope y de FileteAbraham Góngora Góngora0% (1)
- 01 01 P2 2013 I Con SOL142.desbloqueado PDFDocumento6 pagine01 01 P2 2013 I Con SOL142.desbloqueado PDFbrayan cruzNessuna valutazione finora
- Proyecto Final Torneria y FresadoDocumento40 pagineProyecto Final Torneria y FresadoDelgado Jimenez BrayamNessuna valutazione finora
- Rebobinado de motor de licuadoraDocumento5 pagineRebobinado de motor de licuadorasamay100% (2)
- Mantenimiento extractores bodega saboresDocumento3 pagineMantenimiento extractores bodega saboresGabrielNessuna valutazione finora
- Tuerca de CuadranteDocumento1 paginaTuerca de CuadranteCarlos Cabrera ManriqueNessuna valutazione finora
- Procedimiento de Fabricacion de Tolva de Pesaje Por BatchDocumento3 pagineProcedimiento de Fabricacion de Tolva de Pesaje Por BatchJavier Aguirre ChuquihuangaNessuna valutazione finora
- Motor trifásico de inducción de 550 HP con rotor de jaulaDocumento4 pagineMotor trifásico de inducción de 550 HP con rotor de jaulaAndres ManriqueNessuna valutazione finora
- Analisis de Fajas en VDocumento9 pagineAnalisis de Fajas en VYonathan Vera BarcesNessuna valutazione finora
- POE Mantenimiento Motor Alimentadores Vibratorios 2 y 3Documento6 paginePOE Mantenimiento Motor Alimentadores Vibratorios 2 y 3JaramjcNessuna valutazione finora
- Ventilador Centrífugo FINALDocumento18 pagineVentilador Centrífugo FINALJose Elias0% (1)
- Reporte de Trabajos RealizadosDocumento4 pagineReporte de Trabajos RealizadosGianpierre CalderonNessuna valutazione finora
- Hidrostal Sumergible A2QDocumento1 paginaHidrostal Sumergible A2QpieroNessuna valutazione finora
- Proceso de fabricación de tornillo de potencia hexagonalDocumento4 pagineProceso de fabricación de tornillo de potencia hexagonalricardoNessuna valutazione finora
- Manual Tec. de Sol. ElectricaDocumento137 pagineManual Tec. de Sol. ElectricaHanns Pico BarriosNessuna valutazione finora
- Aislamiento en Subestaciones Electricas, Fiee UnmsmDocumento68 pagineAislamiento en Subestaciones Electricas, Fiee UnmsmjosethNessuna valutazione finora
- Ejercicios ManufacturaDocumento28 pagineEjercicios ManufacturaSaraChacpiAlfaroNessuna valutazione finora
- Grafica Operativa de Un GeneradorDocumento7 pagineGrafica Operativa de Un GeneradorEdgar OrtizNessuna valutazione finora
- Andina Mastic Primer 900 Fz.Documento4 pagineAndina Mastic Primer 900 Fz.Ayrton EstradaNessuna valutazione finora
- Esfuerzos Combinados GSGDocumento4 pagineEsfuerzos Combinados GSGGrindaSierraNessuna valutazione finora
- COMPRESORESDocumento24 pagineCOMPRESORESJose CuevasNessuna valutazione finora
- 018 PETS TIE IN 001 Y 012 - Rev - ADocumento16 pagine018 PETS TIE IN 001 Y 012 - Rev - APol QuillaNessuna valutazione finora
- GE Modasa, MP-10 - 208V, 440V, 480VDocumento2 pagineGE Modasa, MP-10 - 208V, 440V, 480VWilmer HuayhuapumaNessuna valutazione finora
- Cuestionario 3º Parcial Teórico - Elementos de MaquinasDocumento19 pagineCuestionario 3º Parcial Teórico - Elementos de MaquinasIgnacio VidableNessuna valutazione finora
- Centrales Hidroelectricas-Power PointDocumento31 pagineCentrales Hidroelectricas-Power PointJose AlvitrezNessuna valutazione finora
- Principios de NeumaticaDocumento8 paginePrincipios de NeumaticaEsme TunionNessuna valutazione finora
- Mantenimiento Preventivo de Fuentes de Poder IIDocumento11 pagineMantenimiento Preventivo de Fuentes de Poder IIjose luisNessuna valutazione finora
- Conexión de Motores Trifasicos de 9 y 12 Puntas TrabajoDocumento19 pagineConexión de Motores Trifasicos de 9 y 12 Puntas Trabajoandres chaparroNessuna valutazione finora
- Manual Miami BreakerDocumento14 pagineManual Miami BreakerFERDINADNessuna valutazione finora
- Matriz de ConsistenciaDocumento1 paginaMatriz de Consistenciasabeeeeeee100% (1)
- Rodamientos SKFDocumento110 pagineRodamientos SKFAlvaro Cordova BerronesNessuna valutazione finora
- Mantenimiento auxiliar de sistemas mecánicos y fluidos de aeronaves. TMVO0109Da EverandMantenimiento auxiliar de sistemas mecánicos y fluidos de aeronaves. TMVO0109Nessuna valutazione finora
- MetodosAnalisis Estructuras de AceroDocumento12 pagineMetodosAnalisis Estructuras de AceroLuis Alan RaymundoNessuna valutazione finora
- Rodamientos y sus tiposDocumento12 pagineRodamientos y sus tiposraul_toledo_300% (1)
- Mecanica de Fluidos (Bueno)Documento40 pagineMecanica de Fluidos (Bueno)Mayor Paz GonzálezNessuna valutazione finora
- Simbologia de Soldadura PDFDocumento11 pagineSimbologia de Soldadura PDFedsonmh1093% (42)
- Soldadura CadwelldDocumento2 pagineSoldadura Cadwelldedsonmh10Nessuna valutazione finora
- Simbologia de Soldadura PDFDocumento11 pagineSimbologia de Soldadura PDFedsonmh1093% (42)
- Decapado y Pasivado Del InoxDocumento16 pagineDecapado y Pasivado Del Inoxrucano1Nessuna valutazione finora
- Control Seguimiento ProyectosDocumento60 pagineControl Seguimiento ProyectosCristian_Majlu_4018Nessuna valutazione finora
- Guia Basica Calderas Industriales Eficientes Fenercom 2013Documento162 pagineGuia Basica Calderas Industriales Eficientes Fenercom 2013Luis Alberto Perez100% (1)
- Memoria de Calculo AndamiosDocumento19 pagineMemoria de Calculo Andamiosedsonmh1096% (25)
- TAREA4 U2 Ejercicios Poleas y Palancas CASIDocumento10 pagineTAREA4 U2 Ejercicios Poleas y Palancas CASIClaudia Nuñez CaleroNessuna valutazione finora
- Fazer 250 PDFDocumento383 pagineFazer 250 PDFedwin ortiz57% (7)
- Catalogo Mack PreciosDocumento29 pagineCatalogo Mack PreciosCarlos Gabriel Cordova CajamuniNessuna valutazione finora
- R6 05 SuplmaDocumento65 pagineR6 05 SuplmaFederico Nuñez AlconNessuna valutazione finora
- SistemadetransmisionycrankJet5R PDFDocumento16 pagineSistemadetransmisionycrankJet5R PDFjohn iguaNessuna valutazione finora
- Especificacion Paneles SIPDocumento1 paginaEspecificacion Paneles SIPRodrigo Andres Merellado BustosNessuna valutazione finora
- QLE-Ottima-Evo - GneDocumento32 pagineQLE-Ottima-Evo - Gnesteven ruizNessuna valutazione finora
- Embrague: tipos, componentes y funcionamientoDocumento83 pagineEmbrague: tipos, componentes y funcionamientoYanh Nicolas Castillo DiazNessuna valutazione finora
- S09.s1-Mandos Finales y Sistema de Frenos de de Maquinaria PesadaDocumento55 pagineS09.s1-Mandos Finales y Sistema de Frenos de de Maquinaria Pesadajocava2992100% (1)
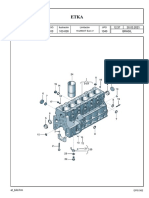
- ETKA documento con lista de piezas OMT5 2017Documento3 pagineETKA documento con lista de piezas OMT5 2017Dario AguilarNessuna valutazione finora
- ODS48 Consumido MensualDocumento12 pagineODS48 Consumido Mensualeragon.alexanderNessuna valutazione finora
- Manual Caja ZFDocumento71 pagineManual Caja ZFCato del Rio80% (15)
- Combat 125Documento59 pagineCombat 125Real MotosNessuna valutazione finora
- Copeland d46dDocumento2 pagineCopeland d46djuanp316Nessuna valutazione finora
- Filtros para ServiciosDocumento15 pagineFiltros para ServiciosGustavo De Haro GonzálezNessuna valutazione finora
- Motor de Combustión Interna 2.2Documento18 pagineMotor de Combustión Interna 2.2Joselyn TorcuatoNessuna valutazione finora
- Manual de RodamientosDocumento27 pagineManual de RodamientosAlexander ZapataNessuna valutazione finora
- Repuestos Bombas PondDocumento82 pagineRepuestos Bombas PondChristian Huertas CavadaNessuna valutazione finora
- TM 574S TwinLimit 2nd Edition March 2012Documento106 pagineTM 574S TwinLimit 2nd Edition March 2012wiloNessuna valutazione finora
- Diseño de trenes de engranajes ordinariosDocumento0 pagineDiseño de trenes de engranajes ordinariosAlberto Castellanos AmadorNessuna valutazione finora
- Mecanismos-tipos-movimientoDocumento39 pagineMecanismos-tipos-movimientoCarlos Daniel GB100% (1)
- Engranajes 2CNDocumento23 pagineEngranajes 2CNDuvan RochaNessuna valutazione finora
- Informe Bomba de EngranajeDocumento7 pagineInforme Bomba de Engranajeitalo moronNessuna valutazione finora
- 02 Sistema de Distribución - Correa de Distribución - Sistema Mecánico Del Motor - Kia CarnivalDocumento11 pagine02 Sistema de Distribución - Correa de Distribución - Sistema Mecánico Del Motor - Kia CarnivalRafael Vargas MéndezNessuna valutazione finora
- EUROBLET BANDAS MODULARES S-C12 - FlushGrid - EsDocumento11 pagineEUROBLET BANDAS MODULARES S-C12 - FlushGrid - EsMercedes PichardoNessuna valutazione finora
- OVERHEAD CRANE - LIFTKET - 2018 - 05 - SpanischDocumento38 pagineOVERHEAD CRANE - LIFTKET - 2018 - 05 - SpanischCOCASTEG S.ANessuna valutazione finora
- Puntos Cadena Repartición Captiva 2.4 20014Documento17 paginePuntos Cadena Repartición Captiva 2.4 20014McOrtiz Ortiz75% (4)
- Informe Semanal N°3 EsgarDocumento15 pagineInforme Semanal N°3 EsgarYulinnio Santisteban HuamanNessuna valutazione finora
- Optimizado para del documento de envío de productosDocumento6 pagineOptimizado para del documento de envío de productosMarco SolísNessuna valutazione finora