Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- 01 - 01 - Introduction To ArmDocumento9 pagine01 - 01 - Introduction To ArmMuhammad ElZeinyNessuna valutazione finora
- Datasheet TM4C123GH6PMDocumento1.409 pagineDatasheet TM4C123GH6PMFernando CaballeroNessuna valutazione finora
- 02 - 01 ARM CortexM ArchitectureDocumento30 pagine02 - 01 ARM CortexM ArchitectureMuhammad ElZeinyNessuna valutazione finora
- 03 - 01 - ARM Exceptions and Interrupts-1Documento15 pagine03 - 01 - ARM Exceptions and Interrupts-1Muhammad ElZeinyNessuna valutazione finora
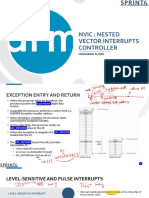
- 03 02 NvicDocumento7 pagine03 02 NvicMuhammad ElZeinyNessuna valutazione finora
- CDP JP Guide 24-7-17Documento134 pagineCDP JP Guide 24-7-17Muhammad ElZeinyNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- BirefringenceDocumento9 pagineBirefringenceDoug Bank100% (1)
- Work and PowerDocumento23 pagineWork and PowerBetjoe PanuncioNessuna valutazione finora
- KOM Expt. No. 2Documento5 pagineKOM Expt. No. 2Vatsal PatelNessuna valutazione finora
- Tutorial 5Documento1 paginaTutorial 5SHOURYA SINGHNessuna valutazione finora
- Philosophy of Quantum Mechanics For EveryoneDocumento14 paginePhilosophy of Quantum Mechanics For Everyonelo laNessuna valutazione finora
- Env68 8 06 06 KCDocumento1 paginaEnv68 8 06 06 KCapi-367296283Nessuna valutazione finora
- CHB302P Viscometer 3rd Sem SSahaDocumento3 pagineCHB302P Viscometer 3rd Sem SSahajoandalilis7316Nessuna valutazione finora
- BITS Pilani: Instructor in Charge-Dr. Kalyana Rama J SDocumento23 pagineBITS Pilani: Instructor in Charge-Dr. Kalyana Rama J SSaiteja SistlaNessuna valutazione finora
- Jurnal Peledakan TambangDocumento8 pagineJurnal Peledakan TambangSyafril MaidiNessuna valutazione finora
- Beams Free Transverse Vibrations of Nano-To-Micron Scale:, 2977-2995 2006 Mingtian XuDocumento20 pagineBeams Free Transverse Vibrations of Nano-To-Micron Scale:, 2977-2995 2006 Mingtian XuEric AmbroziniNessuna valutazione finora
- Design of A Magnetic Levitation Control System PDFDocumento5 pagineDesign of A Magnetic Levitation Control System PDFEliel Marcos RomanciniNessuna valutazione finora
- Term PaperDocumento6 pagineTerm PaperNorshida CalibiNessuna valutazione finora
- 10ME82 16-17 (Control Engg.)Documento30 pagine10ME82 16-17 (Control Engg.)Sharanabasappa SajjanNessuna valutazione finora
- Ferroelectricity in HfO2Documento6 pagineFerroelectricity in HfO2Basharat AhmadNessuna valutazione finora
- Finite Element Method PDFDocumento43 pagineFinite Element Method PDFAdetiyo Burhanudin HakimNessuna valutazione finora
- Archangel Michael Becoming A World Server and Keeper of The Violet FlameDocumento7 pagineArchangel Michael Becoming A World Server and Keeper of The Violet FlameIAMINFINITELOVE100% (3)
- PHYS132 Formula SheetDocumento12 paginePHYS132 Formula SheetMuhammad IshtiaqNessuna valutazione finora
- JKR Astro Research Foundatioin Vimsottari Dasa SystemDocumento6 pagineJKR Astro Research Foundatioin Vimsottari Dasa SystemjeydownloadNessuna valutazione finora
- Powdered Centella Asiatica Extract USP-NF PDFDocumento3 paginePowdered Centella Asiatica Extract USP-NF PDFRafi Akhtar SultanNessuna valutazione finora
- SXXa XSDocumento5 pagineSXXa XSraviteja tankalaNessuna valutazione finora
- Research PaperDocumento18 pagineResearch PaperRommel Dave Tejano100% (1)
- Elma O. Camiom-WPS OfficeDocumento3 pagineElma O. Camiom-WPS OfficeElma Ortega CamionNessuna valutazione finora
- Lock ShimDocumento3 pagineLock ShimJulie WeiNessuna valutazione finora
- 15 04 0662-02-004a Channel Model Final Report r1Documento40 pagine15 04 0662-02-004a Channel Model Final Report r1Alex Samuel Ludeña HuamaniNessuna valutazione finora
- Andhrapradesh IPE SR Inter Model PapersDocumento2 pagineAndhrapradesh IPE SR Inter Model PaperspolamrajuNessuna valutazione finora
- 3D ExerciseDocumento1 pagina3D ExerciseRashiqah RazlanNessuna valutazione finora
- DPL - EnsaioDocumento14 pagineDPL - EnsaioTimothy CaldwellNessuna valutazione finora
- Optimization of Turbo Machinery Validation Against Experimental ResultsDocumento13 pagineOptimization of Turbo Machinery Validation Against Experimental ResultsSrinivasNessuna valutazione finora
- 10th CBSE Science-Compressed PDFDocumento337 pagine10th CBSE Science-Compressed PDFAbhishekNessuna valutazione finora
- Laminar and Turbulent Flow, Experimental Vs Theoretical Profile in A Wind TurbineDocumento12 pagineLaminar and Turbulent Flow, Experimental Vs Theoretical Profile in A Wind Turbinehamza shazibNessuna valutazione finora