Potrebbero piacerti anche
- Torno - Número de Revoluciones en Función de Velocidad y Diámetro de Las PiezasDocumento1 paginaTorno - Número de Revoluciones en Función de Velocidad y Diámetro de Las PiezaslanuseNessuna valutazione finora
- Guía 1 de Ejercicios en Visual CDocumento2 pagineGuía 1 de Ejercicios en Visual ClanuseNessuna valutazione finora
- EJERCICIOS ECHOS de CCS 7mo 2da (Lopez Matias, Mendez Santiago, Mena Joaquin, Teruel Emanuel)Documento12 pagineEJERCICIOS ECHOS de CCS 7mo 2da (Lopez Matias, Mendez Santiago, Mena Joaquin, Teruel Emanuel)lanuseNessuna valutazione finora
- Tema2 - Sistemas de Ecuaciones LinealesDocumento47 pagineTema2 - Sistemas de Ecuaciones Linealesmaria isabelNessuna valutazione finora
- Bucay, Jorge - 26 Cuentos para PensarDocumento19 pagineBucay, Jorge - 26 Cuentos para Pensarfortuweb100% (6)
- Aleaciones de Acero y AluminioDocumento14 pagineAleaciones de Acero y AluminionicomuhapeNessuna valutazione finora
- Apuntes de Analisis Matemat Ico I OlgaDocumento95 pagineApuntes de Analisis Matemat Ico I OlgaJesus MedranoNessuna valutazione finora
- Manual 1 PicDocumento105 pagineManual 1 PiclanuseNessuna valutazione finora
- Tema6 EndomorfismosDiagonalizacionDocumento22 pagineTema6 EndomorfismosDiagonalizacionlanuseNessuna valutazione finora
- ACTIVIDADDocumento1 paginaACTIVIDADlanuseNessuna valutazione finora
- Bucay, Jorge - 26 Cuentos para PensarDocumento19 pagineBucay, Jorge - 26 Cuentos para Pensarfortuweb100% (6)
- Cálculos TriacDocumento2 pagineCálculos TriacDiego Jarrín100% (8)
- Circuito ADC Con PIC12F675Documento1 paginaCircuito ADC Con PIC12F675lanuseNessuna valutazione finora
- Julio Verne - Miguel StrogoffDocumento201 pagineJulio Verne - Miguel StrogoffInnobaPlusNessuna valutazione finora
- Manual Datos I 2003Documento345 pagineManual Datos I 2003zylmaryNessuna valutazione finora
- CI8 WebDocumento24 pagineCI8 WeblanuseNessuna valutazione finora
- Control DC DCDocumento62 pagineControl DC DCNéstor BernalNessuna valutazione finora
- Re Vista 20 No 20151Documento34 pagineRe Vista 20 No 20151lanuseNessuna valutazione finora
- Capitulo 2Documento0 pagineCapitulo 2lanuseNessuna valutazione finora
- Medición precisa con micrómetroDocumento17 pagineMedición precisa con micrómetroLeez Loredo VianaNessuna valutazione finora
- MicroDocumento7 pagineMicrolanuseNessuna valutazione finora
- Electronica AnalogicaDocumento32 pagineElectronica AnalogicaTalia_NNessuna valutazione finora
- AntirreboteccsDocumento1 paginaAntirreboteccslanuseNessuna valutazione finora
- 6th Central Pay Commission Salary CalculatorDocumento15 pagine6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- PRÁCTICA #7 - Proyecto - Regulador Lumínico Mediante El Control de La FaseDocumento7 paginePRÁCTICA #7 - Proyecto - Regulador Lumínico Mediante El Control de La FaselanuseNessuna valutazione finora
- Calculo de Angulo de Disparo de Cktos Rectificadores Controlados.Documento29 pagineCalculo de Angulo de Disparo de Cktos Rectificadores Controlados.JoshEsau67% (3)
- Triac DiacDocumento24 pagineTriac DiaclanuseNessuna valutazione finora
- Conver SoresDocumento9 pagineConver SoreslanuseNessuna valutazione finora
- Kar NaughtDocumento34 pagineKar NaughtlanuseNessuna valutazione finora
- Reporte 2 Fundamentos de Complejidad ComputacionalDocumento11 pagineReporte 2 Fundamentos de Complejidad ComputacionalFernando Marin CrabajalNessuna valutazione finora
- Primeros Pasos Con 310XT - Tutorial Garmin Connect Básico ACTUALIZADO A 28 - 02 - 2012)Documento18 paginePrimeros Pasos Con 310XT - Tutorial Garmin Connect Básico ACTUALIZADO A 28 - 02 - 2012)Anartz Muxika Ledo100% (1)
- Clase 9 Isometrico-Dibujo Pictórico 2013Documento14 pagineClase 9 Isometrico-Dibujo Pictórico 2013César GuerreroNessuna valutazione finora
- Practica 01 WORDDocumento3 paginePractica 01 WORDhenry4puquio0% (1)
- Reporte La Fortaleza DigitalDocumento4 pagineReporte La Fortaleza DigitaljesusNessuna valutazione finora
- Manual de ArcGIS 10Documento6 pagineManual de ArcGIS 10Angel YimmyNessuna valutazione finora
- Vías terciarias del Huila: Carretera El Tablazo-MonguiDocumento12 pagineVías terciarias del Huila: Carretera El Tablazo-MonguiJORGE GONZALEZNessuna valutazione finora
- UFPS-Sistema-EleccionesDocumento2 pagineUFPS-Sistema-Eleccionespekass67% (3)
- Documento DARDO 2016 PDFDocumento2 pagineDocumento DARDO 2016 PDFFastor YgNessuna valutazione finora
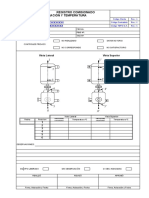
- 03-XXXXXXX-O-MR-260 - P001-X (Reg. Com. Vibracion y Temperatura)Documento1 pagina03-XXXXXXX-O-MR-260 - P001-X (Reg. Com. Vibracion y Temperatura)santiago barrionuevoNessuna valutazione finora
- ExamenSO FDI UCM Junio-2021Documento8 pagineExamenSO FDI UCM Junio-2021Nacho N S KNessuna valutazione finora
- NPV CAPITULO3 OptimDocumento19 pagineNPV CAPITULO3 OptimFredy Geldres Alcalde100% (1)
- Perfil 8020Documento14 paginePerfil 80205555tonyNessuna valutazione finora
- EfpemDocumento58 pagineEfpemCristian SigüinaNessuna valutazione finora
- Data Mining Costa RicaDocumento2 pagineData Mining Costa RicaEdwin AcuñaNessuna valutazione finora
- Primer Parcial Informatica I - Modulos I, II y IIIDocumento6 paginePrimer Parcial Informatica I - Modulos I, II y IIIGermánG.Human100% (2)
- The Innovator S Dilema-EspañolDocumento179 pagineThe Innovator S Dilema-EspañolNicolas de Francisco100% (1)
- Diagnóstico y ReparaciónDocumento95 pagineDiagnóstico y ReparaciónBladimir Camacho100% (2)
- Rv220w QSG SpanishDocumento2 pagineRv220w QSG SpanishDiegoNessuna valutazione finora
- Actualizacion Profesional Continua en La Era ElectronicaDocumento8 pagineActualizacion Profesional Continua en La Era Electronicatapiom00Nessuna valutazione finora
- Manual de Topografia PreliminarDocumento33 pagineManual de Topografia PreliminarMarlon Nevado100% (1)
- Protocolo VTPDocumento8 pagineProtocolo VTPManuel TapiaNessuna valutazione finora
- Manejo de Formulas Y Funciones: 1.1 Asignar Nombre A Un RangoDocumento14 pagineManejo de Formulas Y Funciones: 1.1 Asignar Nombre A Un Rangoerika villalbaNessuna valutazione finora
- Testo Saveris 2 Manual de InstruccionesDocumento40 pagineTesto Saveris 2 Manual de InstruccionespabloNessuna valutazione finora
- Manual de ArcGIS 10Documento101 pagineManual de ArcGIS 10Erick Jheferson Delgado BecerraNessuna valutazione finora
- Descomponiendo El Viejo Podrido Secos Jamón y Pollo Fotografía de Stock - AlamyDocumento4 pagineDescomponiendo El Viejo Podrido Secos Jamón y Pollo Fotografía de Stock - AlamyOmar Lopez CerinoNessuna valutazione finora
- CCN-STIC-599B19-Configuración Segura de Windows 10 (Cliente Independiente)Documento35 pagineCCN-STIC-599B19-Configuración Segura de Windows 10 (Cliente Independiente)gabo1114524Nessuna valutazione finora
- Tesis Patricio SolísDocumento147 pagineTesis Patricio SolísPatricio SolísNessuna valutazione finora
- Curso de Rondin de SeguridadDocumento5 pagineCurso de Rondin de SeguridadArnoldo Rene Sandoval CruzNessuna valutazione finora
- Semana: 6: S6-Ideas para La Metodología Del ConsultorDocumento11 pagineSemana: 6: S6-Ideas para La Metodología Del ConsultorJoa CaballeroNessuna valutazione finora