Potrebbero piacerti anche
- Trabajo 3 - Aspectos Administrativos y Legales PDFDocumento10 pagineTrabajo 3 - Aspectos Administrativos y Legales PDFknightfelix12Nessuna valutazione finora
- Cuadernillo Programacion NXT - 2°rotacion PDFDocumento21 pagineCuadernillo Programacion NXT - 2°rotacion PDFknightfelix12Nessuna valutazione finora
- Medidas Nordex PLANTILLADocumento2 pagineMedidas Nordex PLANTILLAknightfelix12Nessuna valutazione finora
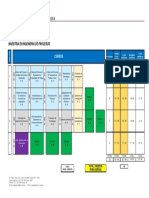
- Malla Curricular Maestria FiqtDocumento1 paginaMalla Curricular Maestria Fiqtknightfelix12Nessuna valutazione finora
- Calculo de Procesos IDocumento3 pagineCalculo de Procesos Iknightfelix12Nessuna valutazione finora
- SCE ES 010-020 R1209 S7-1200 BausteineDocumento40 pagineSCE ES 010-020 R1209 S7-1200 Bausteineknightfelix12100% (1)
- Teoria 5 - 6 Algebra Lineal Semana 11 2017 I Dlut23Documento15 pagineTeoria 5 - 6 Algebra Lineal Semana 11 2017 I Dlut23Lindzay Guerrero HuamánNessuna valutazione finora
- MA263 2021-01 Sesión 12.2 Integral de Superficie de Campo Escalar - SX51Documento31 pagineMA263 2021-01 Sesión 12.2 Integral de Superficie de Campo Escalar - SX51Daniela Machuca VásquezNessuna valutazione finora
- DINAMICADocumento77 pagineDINAMICAJurgen OkNessuna valutazione finora
- Base y Dimensiones de Un Espacio VectorialDocumento18 pagineBase y Dimensiones de Un Espacio VectorialCecy CruzNessuna valutazione finora
- Capítulo 3 Sistemas Equivalentes de FuerzasDocumento51 pagineCapítulo 3 Sistemas Equivalentes de FuerzasLuis ArrietaNessuna valutazione finora
- Trabajo 01 Elementos FinitosDocumento8 pagineTrabajo 01 Elementos FinitosJuan CarlosNessuna valutazione finora
- Matrices Algli PDFDocumento13 pagineMatrices Algli PDFgrisellfcNessuna valutazione finora
- Matriz InversaDocumento10 pagineMatriz InversaSebastian MayorgaNessuna valutazione finora
- Tema 1 MatricesDocumento24 pagineTema 1 MatricesReynaldo RojasNessuna valutazione finora
- S01.s1 - Resolver Ejercicios s1Documento1 paginaS01.s1 - Resolver Ejercicios s1Reni VaniniNessuna valutazione finora
- Calculo de Algoritmo de Floyd MATRIZDocumento3 pagineCalculo de Algoritmo de Floyd MATRIZRonaldo Olivera RodNessuna valutazione finora
- Problemas Resueltos de Matematicas CouDocumento228 pagineProblemas Resueltos de Matematicas Coulionel753100% (4)
- Apuntes MatlabDocumento6 pagineApuntes MatlabMara Ajo BartoloméNessuna valutazione finora
- MATRICESDocumento7 pagineMATRICESEsther GonzalesNessuna valutazione finora
- Ejercicios Integradores - Matrices y Sistemas de Ecuaciones Lineales PDFDocumento2 pagineEjercicios Integradores - Matrices y Sistemas de Ecuaciones Lineales PDFFernando GonzálezNessuna valutazione finora
- Vectores en El Plano Con GeoGebraDocumento41 pagineVectores en El Plano Con GeoGebrapepeNessuna valutazione finora
- Espacio Vectorial de MatricesDocumento6 pagineEspacio Vectorial de MatricesEfraNessuna valutazione finora
- Triptico MatricesDocumento3 pagineTriptico MatricesHugo Olaya50% (2)
- Algebra Lineal Sumativa 2Documento28 pagineAlgebra Lineal Sumativa 2DanielNessuna valutazione finora
- Metodo de AsignacionDocumento13 pagineMetodo de AsignacionCleyzorNessuna valutazione finora
- Monografia de MatricesDocumento87 pagineMonografia de MatricesCristian MedinaNessuna valutazione finora
- Vectores 4Documento9 pagineVectores 4Cèsar Eduardo Vásquez VásquezNessuna valutazione finora
- Matriz TriangularDocumento5 pagineMatriz TriangularWalter Eduardo100% (1)
- Clase 4 Espacios VectorialesDocumento115 pagineClase 4 Espacios VectorialesDanny Riofrio CornelNessuna valutazione finora
- Sistema de Ecuaciones LinealDocumento2 pagineSistema de Ecuaciones LinealAlejandro FernandezNessuna valutazione finora
- Compendio de Definiciones y TeoremasDocumento11 pagineCompendio de Definiciones y TeoremasDayra Ivette Sauri VazquezNessuna valutazione finora
- GeodifDocumento500 pagineGeodifMartin CabreraNessuna valutazione finora
- TemasDocumento2 pagineTemasSTIV artNessuna valutazione finora
- Sem 02 - Sesion 4 - 2023 - 1Documento21 pagineSem 02 - Sesion 4 - 2023 - 1Mateo LudeñaNessuna valutazione finora
- Fundrob G04 PDFDocumento18 pagineFundrob G04 PDFkristelNessuna valutazione finora