Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- MR J2S - ADocumento402 pagineMR J2S - AErika Jeanne Porlas JimenezNessuna valutazione finora
- 0Documento111 pagine0Jose SostenesNessuna valutazione finora
- Mitsubishi A500 Series Brochure (0.4kw To 55kw) PDFDocumento226 pagineMitsubishi A500 Series Brochure (0.4kw To 55kw) PDFThanh BuiNessuna valutazione finora
- Manual Provit B&R 2200Documento332 pagineManual Provit B&R 2200Fredy Mauricio Diaz VargasNessuna valutazione finora
- PowerPanel300 PDFDocumento578 paginePowerPanel300 PDFMárcio FernandesNessuna valutazione finora
- EVS93xx - 9300 Cam Profiler - v8-0 - EN PDFDocumento467 pagineEVS93xx - 9300 Cam Profiler - v8-0 - EN PDFWilson Barco MoralesNessuna valutazione finora
- Compa RousDocumento1 paginaCompa RousAugusto FigueiraNessuna valutazione finora
- Spark 2000 Ul: Instruction ManualDocumento65 pagineSpark 2000 Ul: Instruction ManualMárcio Fernandes0% (1)
- UserManual GE PLCDocumento447 pagineUserManual GE PLCThanh BaronNessuna valutazione finora
- FR D700 - NA Manual PDFDocumento294 pagineFR D700 - NA Manual PDFMárcio FernandesNessuna valutazione finora
- Spark 2000 BS: Instruction ManualDocumento63 pagineSpark 2000 BS: Instruction ManualMárcio FernandesNessuna valutazione finora
- A-Eberle DT Reg-Da GBDocumento0 pagineA-Eberle DT Reg-Da GBMárcio FernandesNessuna valutazione finora
- RD51 Ib03Documento222 pagineRD51 Ib03Márcio FernandesNessuna valutazione finora
- Pe 194802B Philips Manual DatasheetDocumento14 paginePe 194802B Philips Manual DatasheetMárcio FernandesNessuna valutazione finora
- FX3S InstallationManual Hardware JY997D48301 ADocumento4 pagineFX3S InstallationManual Hardware JY997D48301 AMárcio FernandesNessuna valutazione finora
- Bru SeriesDocumento307 pagineBru SeriesMárcio FernandesNessuna valutazione finora
- FR ABR H2 2k PDFDocumento13 pagineFR ABR H2 2k PDFMárcio FernandesNessuna valutazione finora
- E1000 User ManualDocumento119 pagineE1000 User ManualMárcio Fernandes78% (9)
- ACS100 Manual EngDocumento52 pagineACS100 Manual EngMárcio FernandesNessuna valutazione finora
- FR ABR H2 2k PDFDocumento13 pagineFR ABR H2 2k PDFMárcio FernandesNessuna valutazione finora
- VCB 2C Vector - GBDocumento117 pagineVCB 2C Vector - GBppeanut70100% (1)
- IndexDocumento26 pagineIndexMárcio FernandesNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Ge KV2C FormsDocumento1 paginaGe KV2C Formsbong destura100% (1)
- InteliDrive IPC DatasheetDocumento4 pagineInteliDrive IPC DatasheetMuhammad Shoaib HussainNessuna valutazione finora
- Weihong NK260 PDFDocumento145 pagineWeihong NK260 PDFshahNessuna valutazione finora
- 0-Guia ParticipanteDocumento94 pagine0-Guia ParticipanteGerman Bernal100% (1)
- Home Automation Using Android123Documento18 pagineHome Automation Using Android123newNessuna valutazione finora
- KXNSERIESDocumento6 pagineKXNSERIESJorge Martin Bejarano GonzalezNessuna valutazione finora
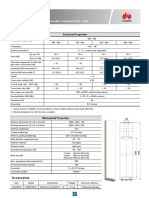
- Antenna Specifications: Electrical PropertiesDocumento2 pagineAntenna Specifications: Electrical PropertiesАнтон100% (1)
- Design of An Off Grid Photovoltaic L College Wudil Kano StateDocumento7 pagineDesign of An Off Grid Photovoltaic L College Wudil Kano StateahmedNessuna valutazione finora
- RDF600KN DataSheetDocumento18 pagineRDF600KN DataSheetRoudy J. MhawasNessuna valutazione finora
- Ratings Book: Technical GuideDocumento44 pagineRatings Book: Technical GuideSamir KhanNessuna valutazione finora
- TCN Journal 2021 June EditionDocumento72 pagineTCN Journal 2021 June EditiontcnjournalonlineNessuna valutazione finora
- Manual Logitech X-230 SpeakersDocumento9 pagineManual Logitech X-230 SpeakersAnonymous qrSsYuxyoYNessuna valutazione finora
- How Electric Cars WorkDocumento4 pagineHow Electric Cars WorkCarla LoiaconoNessuna valutazione finora
- Plugin Minac140 220Documento2 paginePlugin Minac140 220skluxNessuna valutazione finora
- 74109Documento7 pagine74109Nur Hasana FNessuna valutazione finora
- Teesta III: One of The Largest Hydro-Electric Projects in IndiaDocumento1 paginaTeesta III: One of The Largest Hydro-Electric Projects in Indiakamardheen majithNessuna valutazione finora
- M800Documento6 pagineM800receh ceritaNessuna valutazione finora
- Dual Beam Oscilloscope Dual and Multiple Beam OscilloscopesDocumento3 pagineDual Beam Oscilloscope Dual and Multiple Beam OscilloscopesDebashish PalNessuna valutazione finora
- Pre-Scan RE Test - Internal - Rev 1Documento57 paginePre-Scan RE Test - Internal - Rev 1Engla ZikrillahNessuna valutazione finora
- 3.2 Photovoltaic System Design PDFDocumento63 pagine3.2 Photovoltaic System Design PDFCHOON CHEAK YOKNessuna valutazione finora
- Seko Tekna Evo TPGDocumento4 pagineSeko Tekna Evo TPGAndre ArmawanNessuna valutazione finora
- Littlebits Arduino Coding Kit Invention GuideDocumento32 pagineLittlebits Arduino Coding Kit Invention GuideDavid Badosa PuigNessuna valutazione finora
- ARC 2022 JMK ResearchDocumento6 pagineARC 2022 JMK Researchpundir_anurag8652Nessuna valutazione finora
- Introduction To Semiconductor DevicesDocumento1 paginaIntroduction To Semiconductor Devicesgalih suryo gumilangNessuna valutazione finora
- 06Documento146 pagine06Eli RochaNessuna valutazione finora
- PES TP TR71 PSRC Microgrid 082019Documento58 paginePES TP TR71 PSRC Microgrid 082019A guitar la tocarraNessuna valutazione finora
- Cat Transferswitchsircom enDocumento4 pagineCat Transferswitchsircom enWira Nur IndrawanNessuna valutazione finora
- 49 43UJ6300-SA 0002 4602 WebOS3.5 PDFDocumento48 pagine49 43UJ6300-SA 0002 4602 WebOS3.5 PDFoskrrg100% (1)
- Water Level Indicator: Project Report ONDocumento22 pagineWater Level Indicator: Project Report ONAditi MahendraNessuna valutazione finora
- Mind Map (Semi)Documento2 pagineMind Map (Semi)Amirul Mukminin Zakaria SymantechNessuna valutazione finora