Potrebbero piacerti anche
- Principles of The Doctrine of ChristDocumento17 paginePrinciples of The Doctrine of ChristNovus Blackstar100% (2)
- SAM Project 1bDocumento13 pagineSAM Project 1bNolan Blair0% (2)
- Introduction To Wireless Communication - Radio CommunicationDocumento21 pagineIntroduction To Wireless Communication - Radio CommunicationYas773Nessuna valutazione finora
- Hsse S 005 - Hsse in ProjectsDocumento11 pagineHsse S 005 - Hsse in ProjectsAHMED AMIRANessuna valutazione finora
- Wearable ComputingDocumento3 pagineWearable ComputingInnovative Research PublicationsNessuna valutazione finora
- Identity TheftDocumento3 pagineIdentity TheftInnovative Research PublicationsNessuna valutazione finora
- Unitized Curtain Wall SystemDocumento38 pagineUnitized Curtain Wall Systems.senthil nathan100% (1)
- Surveillance NetworksDocumento2 pagineSurveillance NetworksInnovative Research PublicationsNessuna valutazione finora
- Eight Directions Feng ShuiDocumento6 pagineEight Directions Feng Shuifree_scribdNessuna valutazione finora
- Yawning Analysis For Driver Drowsiness DetectionDocumento4 pagineYawning Analysis For Driver Drowsiness DetectionInternational Journal of Research in Engineering and TechnologyNessuna valutazione finora
- An Efficient Frame Work To Identify Driver Behavior Using Mouth and Eye MappingDocumento4 pagineAn Efficient Frame Work To Identify Driver Behavior Using Mouth and Eye MappingijsretNessuna valutazione finora
- A Robust Hybrid Design For Driver Fatigue DetectionDocumento9 pagineA Robust Hybrid Design For Driver Fatigue DetectionJournalofICTNessuna valutazione finora
- Automatic Local Gabor Features Extraction For Face RecognitionDocumento7 pagineAutomatic Local Gabor Features Extraction For Face RecognitionShahenaaz ShaikNessuna valutazione finora
- Journal of Computer Engineering & Technology (JCET) : ©iaemeDocumento9 pagineJournal of Computer Engineering & Technology (JCET) : ©iaemeIAEME PublicationNessuna valutazione finora
- Jian-Mei LEI, Lei Chen, Zi Zeng, Zhi-Da LAI, Xin LIU, Qing-Wen HAN and Li JINDocumento5 pagineJian-Mei LEI, Lei Chen, Zi Zeng, Zhi-Da LAI, Xin LIU, Qing-Wen HAN and Li JINkarthika sudheerNessuna valutazione finora
- Eye State Detection Using Image Processing TechniqueDocumento6 pagineEye State Detection Using Image Processing TechniqueAJER JOURNALNessuna valutazione finora
- Real-Time Face Detection On A "Dual-Sensor" Smart Camera Using Smooth-Edges TechniqueDocumento5 pagineReal-Time Face Detection On A "Dual-Sensor" Smart Camera Using Smooth-Edges TechniquehioioioioNessuna valutazione finora
- Driver's Eye State Identification Based On Robust Iris Pair LocalizationDocumento4 pagineDriver's Eye State Identification Based On Robust Iris Pair LocalizationKhalil UllahNessuna valutazione finora
- Shishir Reddy 1.1Documento8 pagineShishir Reddy 1.1ER Publications, IndiaNessuna valutazione finora
- A Modified Algorithm For Thresholding and Detection of Facial Information From Color Images Using Color Centroid Segmentation and Contourlet TransformDocumento9 pagineA Modified Algorithm For Thresholding and Detection of Facial Information From Color Images Using Color Centroid Segmentation and Contourlet TransformsipijNessuna valutazione finora
- Colour Face Recognition A Novel Recognition MethodDocumento5 pagineColour Face Recognition A Novel Recognition MethodRamesh MallaiNessuna valutazione finora
- Real-Time Driver's Drowsiness Monitoring Based On Dynamically Varying ThresholdDocumento6 pagineReal-Time Driver's Drowsiness Monitoring Based On Dynamically Varying ThresholdLakshay SharmaNessuna valutazione finora
- Human Resource Monitoring SysterDocumento7 pagineHuman Resource Monitoring SysterSiddharth PatiNessuna valutazione finora
- Drowsy Driver Warning System Using Image ProcessingDocumento6 pagineDrowsy Driver Warning System Using Image ProcessingksNessuna valutazione finora
- Synopsis of Drowsiness Detection SystemDocumento4 pagineSynopsis of Drowsiness Detection Systemmovies downloaderNessuna valutazione finora
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Documento11 pagineIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationNessuna valutazione finora
- Driver Fatigue Detection using MATLAB & PIC ControllerDocumento5 pagineDriver Fatigue Detection using MATLAB & PIC ControllerYogesh GowdaNessuna valutazione finora
- Conventional Entropy Quantifier and Modi PDFDocumento8 pagineConventional Entropy Quantifier and Modi PDFAbdullah GubbiNessuna valutazione finora
- Driver FatigueDocumento29 pagineDriver Fatigueniraj_chandrani100% (1)
- Automatic Landmark Detection and Face Recognition for Side-View ImagesDocumento8 pagineAutomatic Landmark Detection and Face Recognition for Side-View ImagesĐoàn Tiến ĐạtNessuna valutazione finora
- Design of A Face Recognition SystemDocumento12 pagineDesign of A Face Recognition SystemWeights MattersNessuna valutazione finora
- Advanced Fatigue Detection and Accident Prevention SystemDocumento13 pagineAdvanced Fatigue Detection and Accident Prevention SystemArun Mozhi GNessuna valutazione finora
- Three-Dimensional Model Based Face Recognition: Figure 1. Face Appearance VariationsDocumento4 pagineThree-Dimensional Model Based Face Recognition: Figure 1. Face Appearance VariationsSun BirdsNessuna valutazione finora
- Automatic Number Plate RecognitionDocumento12 pagineAutomatic Number Plate RecognitionTAgore Ravi TejaNessuna valutazione finora
- Driver Drowsiness Detection Using Machine Learning With Visual BehaviourDocumento6 pagineDriver Drowsiness Detection Using Machine Learning With Visual Behaviourchaitrashivaram17Nessuna valutazione finora
- Adams Midterm ExamDocumento3 pagineAdams Midterm ExamPerry AdamsNessuna valutazione finora
- Emotion Based Music Player-XBeatsDocumento7 pagineEmotion Based Music Player-XBeatsIJAERS JOURNALNessuna valutazione finora
- V2I4201320Documento6 pagineV2I4201320woceke9914Nessuna valutazione finora
- An Accurate Facial Component Detection Using Gabor FilterDocumento8 pagineAn Accurate Facial Component Detection Using Gabor FilterCut EncutNessuna valutazione finora
- Implementation of Reliable Open SourceDocumento6 pagineImplementation of Reliable Open Sourcenilesh_092Nessuna valutazione finora
- Implementation of Travel BuddyDocumento17 pagineImplementation of Travel BuddySEIT02 Abhishek GokheNessuna valutazione finora
- A People Counting System Based On Face-DetectionDocumento4 pagineA People Counting System Based On Face-DetectionCastaka Agus SNessuna valutazione finora
- Iris Detection Using Intensity and Edge Information: Tsuyoshi Kawaguchi, Mohamed RizonDocumento14 pagineIris Detection Using Intensity and Edge Information: Tsuyoshi Kawaguchi, Mohamed RizonstefanNessuna valutazione finora
- Biometric Identification Using Matching Algorithm MethodDocumento5 pagineBiometric Identification Using Matching Algorithm MethodInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Face Detection - A Literature Survey: AbstractDocumento4 pagineFace Detection - A Literature Survey: AbstractIjctJournalsNessuna valutazione finora
- Skin Color SegDocumento6 pagineSkin Color SegSachin MoreNessuna valutazione finora
- Skin Color Segmentation Based Face Detection Using Multi-Color SpaceDocumento6 pagineSkin Color Segmentation Based Face Detection Using Multi-Color SpaceAminaHodžićNessuna valutazione finora
- New Method for Eye Detection in Color Images Using Corner DetectionDocumento8 pagineNew Method for Eye Detection in Color Images Using Corner DetectionOscar Duque SuarezNessuna valutazione finora
- Face Detection Using Combined Skin Color DetectorDocumento5 pagineFace Detection Using Combined Skin Color DetectorAyonabha ChandraNessuna valutazione finora
- Real Time Traffic Light Control Using Image ProcessingDocumento5 pagineReal Time Traffic Light Control Using Image ProcessingCharan KilariNessuna valutazione finora
- Facial Features ExtractionDocumento12 pagineFacial Features ExtractionSohaib Lucky CharmNessuna valutazione finora
- Methods Ofautomaticlicenseplaterecognition: A ReviewDocumento4 pagineMethods Ofautomaticlicenseplaterecognition: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Design An Eye Tracking Mouse: Minal Nehete, Madhuri Lokhande, Kranti AhireDocumento4 pagineDesign An Eye Tracking Mouse: Minal Nehete, Madhuri Lokhande, Kranti AhireVinod TheteNessuna valutazione finora
- A Noval Approach For Face Spoof Detection Using Color-Texture, Distortion and Quality ParametersDocumento3 pagineA Noval Approach For Face Spoof Detection Using Color-Texture, Distortion and Quality ParametersEditor IJRITCCNessuna valutazione finora
- A Survey Fatigue Monitoring SystemDocumento3 pagineA Survey Fatigue Monitoring Systemlambert macheteNessuna valutazione finora
- Automatic Eyewinks Interpretation System Using Face Orientation Recognition For Human-Machine InterfaceDocumento9 pagineAutomatic Eyewinks Interpretation System Using Face Orientation Recognition For Human-Machine InterfaceMuhammad SufianNessuna valutazione finora
- Face Detection Using Color Segmentation and Template MatchingDocumento32 pagineFace Detection Using Color Segmentation and Template MatchingRabin KoiralaNessuna valutazione finora
- Suivi VisageDocumento5 pagineSuivi VisageFahem OuazeneNessuna valutazione finora
- Object Detection in Image Processing Using Edge Detection TechniquesDocumento4 pagineObject Detection in Image Processing Using Edge Detection TechniquesIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Memory Efficient Human Face Recognition Using Fiducial PointsDocumento8 pagineMemory Efficient Human Face Recognition Using Fiducial Pointseditor_ijarcsseNessuna valutazione finora
- Quality Assessment For Online Iris ImagesDocumento13 pagineQuality Assessment For Online Iris ImagesCS & ITNessuna valutazione finora
- Yawn Counter and Fatigue DetectorDocumento7 pagineYawn Counter and Fatigue DetectorSandeep KumarNessuna valutazione finora
- Real Time Car Parking System Using Image ProcessingDocumento5 pagineReal Time Car Parking System Using Image Processingprashant_ganesh_1Nessuna valutazione finora
- E D U F N C - C: Fficient Eyes Etection Sing AST Ormalised Ross OrrelationDocumento7 pagineE D U F N C - C: Fficient Eyes Etection Sing AST Ormalised Ross OrrelationsipijNessuna valutazione finora
- Face Detection and Recognition Model Based On Skin Colour and Edge Information For Frontal Face ImagesDocumento10 pagineFace Detection and Recognition Model Based On Skin Colour and Edge Information For Frontal Face ImagesIAEME PublicationNessuna valutazione finora
- Face DetectingDocumento6 pagineFace DetectingMohammad alhaboob2030Nessuna valutazione finora
- Tracking and Counting TheDocumento8 pagineTracking and Counting TheMandy DiazNessuna valutazione finora
- The Effect of I Mage Resolution On The Performance of A Face Recognition SystemDocumento6 pagineThe Effect of I Mage Resolution On The Performance of A Face Recognition SystemJohn GreenNessuna valutazione finora
- AN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESDa EverandAN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESNessuna valutazione finora
- Case Study: Implementation of 5S Methodology in JCB Assembly Business Unit Material StorageDocumento6 pagineCase Study: Implementation of 5S Methodology in JCB Assembly Business Unit Material StorageInnovative Research PublicationsNessuna valutazione finora
- The Experimental Study of Eccentric Loadingfor Piled Raft Foundations Settling On Slope CrestDocumento5 pagineThe Experimental Study of Eccentric Loadingfor Piled Raft Foundations Settling On Slope CrestInnovative Research PublicationsNessuna valutazione finora
- Named Data NetworkingDocumento2 pagineNamed Data NetworkingInnovative Research PublicationsNessuna valutazione finora
- Structural Analysis of A Charcoal Sieving Machine Under Dynamic LoadDocumento3 pagineStructural Analysis of A Charcoal Sieving Machine Under Dynamic LoadInnovative Research PublicationsNessuna valutazione finora
- Rainfall-Runoff Modeling Using Artificial Neural Networks and HEC - HMS (Case Study: Catchment of Gharasoo)Documento4 pagineRainfall-Runoff Modeling Using Artificial Neural Networks and HEC - HMS (Case Study: Catchment of Gharasoo)Innovative Research PublicationsNessuna valutazione finora
- Power Transformer Protection Using Fuzzy Logic Based ControllerDocumento5 paginePower Transformer Protection Using Fuzzy Logic Based ControllerInnovative Research PublicationsNessuna valutazione finora
- Social Network Analysis For Web-Based CommunityDocumento4 pagineSocial Network Analysis For Web-Based CommunityInnovative Research PublicationsNessuna valutazione finora
- 3D Modeling of Complex Structure Based On AutoCAD VBADocumento3 pagine3D Modeling of Complex Structure Based On AutoCAD VBAInnovative Research PublicationsNessuna valutazione finora
- Information EngineeringDocumento2 pagineInformation EngineeringInnovative Research PublicationsNessuna valutazione finora
- Analysis On The Generation and Control of Strip Defects On The Surface of Color Coated PlatesDocumento3 pagineAnalysis On The Generation and Control of Strip Defects On The Surface of Color Coated PlatesInnovative Research PublicationsNessuna valutazione finora
- Analysis On Quenching Cracks of Engine CrankshaftDocumento4 pagineAnalysis On Quenching Cracks of Engine CrankshaftInnovative Research PublicationsNessuna valutazione finora
- Computational EconomicsDocumento2 pagineComputational EconomicsInnovative Research PublicationsNessuna valutazione finora
- Design of Quick-Sensing Device For Temperature Difference Generation Environment Based On Single Chip MicrocomputerDocumento3 pagineDesign of Quick-Sensing Device For Temperature Difference Generation Environment Based On Single Chip MicrocomputerInnovative Research PublicationsNessuna valutazione finora
- Fluoride Removal Efficiency of Commercially Available Reverse Osmosis Water Purifying Systems in Removing Fluoride Ions From Drinking Water in IndiaDocumento4 pagineFluoride Removal Efficiency of Commercially Available Reverse Osmosis Water Purifying Systems in Removing Fluoride Ions From Drinking Water in IndiaInnovative Research PublicationsNessuna valutazione finora
- Internet AddictionDocumento2 pagineInternet AddictionInnovative Research PublicationsNessuna valutazione finora
- Review of The Development of Several True 3D Display TechnologyDocumento5 pagineReview of The Development of Several True 3D Display TechnologyInnovative Research PublicationsNessuna valutazione finora
- Information EngineeringDocumento2 pagineInformation EngineeringInnovative Research PublicationsNessuna valutazione finora
- Role of Coaching Institutes in IndiaDocumento5 pagineRole of Coaching Institutes in IndiaInnovative Research PublicationsNessuna valutazione finora
- Estimating Sea Level Change at The Egyptian Coasts Using Different Data SourcesDocumento9 pagineEstimating Sea Level Change at The Egyptian Coasts Using Different Data SourcesInnovative Research PublicationsNessuna valutazione finora
- Online Laboratory: Roy G. Perry College of Engineering Prairie View A&M University Prairie View, TX 77446Documento2 pagineOnline Laboratory: Roy G. Perry College of Engineering Prairie View A&M University Prairie View, TX 77446Innovative Research PublicationsNessuna valutazione finora
- Preliminary Study On Dimocarpus Longan Peel As Inhibitors For The Pitting Corrosion of 5052-O and 6061-O Aluminium Alloys in Artificial Brine SolutionDocumento4 paginePreliminary Study On Dimocarpus Longan Peel As Inhibitors For The Pitting Corrosion of 5052-O and 6061-O Aluminium Alloys in Artificial Brine SolutionInnovative Research PublicationsNessuna valutazione finora
- Mobile InternetDocumento2 pagineMobile InternetInnovative Research PublicationsNessuna valutazione finora
- Computational Physics: An IntroductionDocumento2 pagineComputational Physics: An IntroductionInnovative Research PublicationsNessuna valutazione finora
- Effect of Alccofine and Foundry Slag On Compressive Strength of High Strength ConcreteDocumento4 pagineEffect of Alccofine and Foundry Slag On Compressive Strength of High Strength ConcreteInnovative Research PublicationsNessuna valutazione finora
- Computational ElectromagneticsDocumento3 pagineComputational ElectromagneticsInnovative Research PublicationsNessuna valutazione finora
- Comparative Print Quality Analysis of Screen Printing and Liquid Ink Based Digital Printing MachinesDocumento3 pagineComparative Print Quality Analysis of Screen Printing and Liquid Ink Based Digital Printing MachinesInnovative Research PublicationsNessuna valutazione finora
- 4.6.6 Lab View Wired and Wireless Nic InformationDocumento4 pagine4.6.6 Lab View Wired and Wireless Nic InformationThắng NguyễnNessuna valutazione finora
- Comparing Means of Two GroupsDocumento8 pagineComparing Means of Two GroupsRobert Kier Tanquerido TomaroNessuna valutazione finora
- KoL Mekflu - 9Documento104 pagineKoL Mekflu - 9Maha D NugrohoNessuna valutazione finora
- Duct Seal: Multi Cable and Pipe Sealing SystemDocumento8 pagineDuct Seal: Multi Cable and Pipe Sealing SystemSri VarshiniNessuna valutazione finora
- M and S - Capstone Marketing Across Cultures Fons TrompenaarsDocumento398 pagineM and S - Capstone Marketing Across Cultures Fons TrompenaarsBof BeosNessuna valutazione finora
- Installation and Operating Instructions Gen-Key: Energy DivisionDocumento22 pagineInstallation and Operating Instructions Gen-Key: Energy DivisionAnonymous RcxX0FcNessuna valutazione finora
- IFU Egg Yolk Tellurite EmulsionDocumento4 pagineIFU Egg Yolk Tellurite EmulsionoktaNessuna valutazione finora
- Renold Transmission Chain Catalogue ENG 0112Documento94 pagineRenold Transmission Chain Catalogue ENG 0112nataliaNessuna valutazione finora
- Best Practice Guidelines For Cardiac Rehabilitation and Secondary Prevention: A SynopsisDocumento16 pagineBest Practice Guidelines For Cardiac Rehabilitation and Secondary Prevention: A SynopsisErdy VincentNessuna valutazione finora
- Tauros TBM Guidance SystemDocumento3 pagineTauros TBM Guidance SystemMiloš StanimirovićNessuna valutazione finora
- Useful List of Responsive Navigation and Menu Patterns - UI Patterns - GibbonDocumento16 pagineUseful List of Responsive Navigation and Menu Patterns - UI Patterns - Gibbonevandrix0% (1)
- AmpConectorsExtracto PDFDocumento5 pagineAmpConectorsExtracto PDFAdrian AvilesNessuna valutazione finora
- English NotesDocumento39 pagineEnglish NotesNorAini MohamadNessuna valutazione finora
- SDH PDFDocumento370 pagineSDH PDFClaudia GafencuNessuna valutazione finora
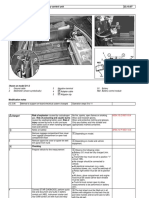
- Checking battery control unitDocumento3 pagineChecking battery control unitjuanNessuna valutazione finora
- Lect 5Documento8 pagineLect 5LuaNessuna valutazione finora
- Numerical Methods NotesDocumento21 pagineNumerical Methods Notesdean427Nessuna valutazione finora
- Deepali Bhartiya: TCI Express Limited Gurgaon Assistant Manager Prateek Group Noida Senior ExecutiveDocumento3 pagineDeepali Bhartiya: TCI Express Limited Gurgaon Assistant Manager Prateek Group Noida Senior ExecutiveThe Cultural CommitteeNessuna valutazione finora
- 2 Science Animals Practise TestDocumento2 pagine2 Science Animals Practise TestThrisha WickramasingheNessuna valutazione finora
- Vision CSP22 Abhyaas Test 3SDocumento44 pagineVision CSP22 Abhyaas Test 3SManasa DevarakondaNessuna valutazione finora
- NRBC-Internship Report - ShafayetDocumento54 pagineNRBC-Internship Report - ShafayetShafayet JamilNessuna valutazione finora
- Parameter Pengelasan SMAW: No Bahan Diameter Ampere Polaritas Penetrasi Rekomendasi Posisi PengguanaanDocumento2 pagineParameter Pengelasan SMAW: No Bahan Diameter Ampere Polaritas Penetrasi Rekomendasi Posisi PengguanaanKhamdi AfandiNessuna valutazione finora
- ICT Backup Procedure PolicyDocumento8 pagineICT Backup Procedure PolicySultan BatoorNessuna valutazione finora
- Introduction To Computing Week 2Documento23 pagineIntroduction To Computing Week 2Jerick FernandezNessuna valutazione finora