Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Aula 09 MER
Caricato da
Felipe OliveiraTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Aula 09 MER
Caricato da
Felipe OliveiraCopyright:
Formati disponibili
Mdulo 1 Comando e Proteo
ESPECIFICAO DE MOTORES ELTRICOS
2.1 POTNCIA NOMINAL
Quando deseja-se escolher um motor para acionar uma determinada carga, preciso conhecer o conjugado requerido pela carga e a rotao que esta carga deve ter em condies nominais. Conhecendo-se tambm o tipo de acoplamento possvel saber qual a rotao nominal do motor. Portanto a potncia nominal do motor dada por:
Pn = 2. .n N .C n
(2.1.1)
Onde:
Pn Cn nN
= Potncia nominal do motor em Watt; = Conjugado nominal do motor em Nm; = Rotao nominal do motor em rps.
Na equao (2.1.1) considerou-se que o conjugado requerido pela carga igual ao conjugado nominal do motor. Esta considerao s verdadeira para acoplamento direto. Quando o acoplamento for com reduo de velocidade, o conjugado requerido pela carga deve ser referido ao eixo do motor, da seguinte maneira:
Cn =
ac
nC C cn nN
(2.1.2)
Onde:
nC Ccn ac nN
= Rotao da carga em rps; = Conjugado de carga nominal, dado em Nm; = Rendimento do acoplamento; = Rotao nominal do motor em rps.
O rendimento do acoplamento definido por:
ac =
Onde: Pc Pn
Pc Pn
(2.1.3)
= Potncia transmitida a carga em Watt; = Potncia nominal do motor em Watt.
Na tabela 2.1.1, pode-se observar o rendimento de alguns tipos de acoplamentos mais utilizados.
CTC - Centro de Treinamento de Clientes
157
Mdulo 1 Comando e Proteo
TIPO DE ACOPLAMENTO
Direto Embreagem Eletromagntica Polia com Correia Plana Polia com Correia em V Engrenagem Roda Dentada (Correia) Card Acoplamento Hidrulico
FAIXA DE RENDIMENTO (%)
100 87 - 98 95 - 98 97 - 99 96 - 99 97 - 98 25 - 100 100
Tabela 2.1.1 - Rendimento de acoplamentos.
Obs.: Potncia normalmente expressa em kW, que um mltiplo do Watt.
Portanto : 1 kW = 1000 W. Uma outra unidade de potncia muito utilizada na prtica o Cavalo Vapor (cv). A relao entre cv e kW mostrado abaixo: 1 cv = 0,736 kW
Exemplo: Qual a potncia que um motor de IV plos 60 Hz deve ter para acionar uma carga com conjugado de 4 Nm, rotao de 1200 rpm e acoplamento por correia dentada ?
Pn = 2. .n N .C n n 1 Cn = C C cn ac n N
1rps = 1rpm ; Ccn = 4Nm; nC = 1200rpm; nN = 1800rpm; ac = 97 98% 60
Cn =
Pn = 2
1 1200 4 0,97 1800
Cn = 2,75 Nm
1800 2,75 60
Pn = 518,36 W = 0,518 kW ou 0,70 cv
CTC - Centro de Treinamento de Clientes
158
Mdulo 1 Comando e Proteo
2.2 CONJUGADO RESISTENTE DA CARGA
o conjugado requerido pela carga, e portanto, depende do tipo de carga a ser acionada pelo motor. Porm todos podem ser representados pela expresso:
Cc = CO + k c .n x
(2.2.1)
Onde :
Cc = Conjugado resistente da carga em Nm; C0 = Conjugado da carga para rotao zero em Nm; kc = Constante que depende da carga; x = Parmetro dependente da carga, pode assumir os valores -1, 0, 1, 2.
De acordo com a equao (2.2.1) percebe-se que o conjugado da carga varia com a rotao n. Esta variao depende do parmetro x, e assim as cargas podem ser classificadas em quatro grupos:
2.2.1 CONJUGADO CONSTANTE
Para este tipo de carga o parmetro x zero (x = 0). Portanto:
Cc = (C0 + k c ) = Constante
(2.2.1.1)
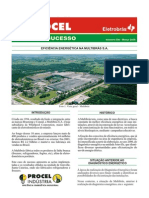
Nas mquinas deste tipo, o conjugado permanece constante durante a variao de velocidade e a potncia aumenta proporcionalmente com a velocidade. Logo:
Pc = (C0 + k c ) n
(2.2.1.2)
Onde :
kc = Constante que depende da carga; Pc = Potncia de carga.
Este caso mostrado na figura 2.1.
M = Conjugado resistente da carga Constante P = Potncia proporcional ao nmero de rotaes Figura 2.1
CTC - Centro de Treinamento de Clientes
159
Mdulo 1 Comando e Proteo
Exemplos de cargas com conjugados constantes: Compressores a pisto; Talhas; Guindastes; Bombas a pisto; Britadores; Transportadores contnuos.
2.2.2 CONJUGADO LINEAR
Neste grupo o parmetro x igual a 1 (x = 1). Ento:
Cc = C0 + (k c n) = Linear
(2.2.2.1)
Nestes tipos de mquinas o conjugado varia linearmente com a rotao; j a potncia, varia com o quadrado da rotao. Portanto:
Pc = (C0 n) + (k c n 2 )
(2.2.2.2)
A figura 2.2 mostra este caso.
M = Conjugado resistente de carga proporcional a n P = Potncia proporcional a n2 Figura 2.2 Exemplos de cargas com conjugado linear:
Calandra com atrito viscoso (para calandrar papel).
Obs.: Aplicao muito rara. 2.2.3 CONJUGADO QUADRTICO
Neste caso tem-se x = 2 e o conjugado dado por:
Cc = C0 + (k c n 2 ) = Parablico
CTC - Centro de Treinamento de Clientes
(2.2.3.1)
160
Mdulo 1 Comando e Proteo
Neste caso o conjugado varia com o quadrado da rotao e a potncia com o cubo da rotao. Logo: Pc = (C0 n) + (k c n 3 ) (2.2.3.2) A figura 2.3 mostra este caso.
M = Conjugado resistente de carga proporcional a n2 P = Potncia proporcional a n3 Figura 2.3 Exemplos de cargas com conjugado quadrtico: Bombas centrfugas; Ventiladores; Misturadores centrfugos.
2.2.4 CONJUGADO HIPERBLICO
Neste caso temos x = 1, e o conjugado dado por:
Cc = kc = Hiperblico n
(2.2.4.1)
Neste tipo de carga a constante C0 pode ser considerado nulo. Pela expresso (2.2.4.1) percebe-se que para n = 0, o conjugado seria infinito, o que no tem sentido fsico. Este fato na prtica no acontece porque a rotao da mquina s pode variar entre um limite mnimo (n1) e mximo (n2). A potncia neste caso permanece constante, isto , no varia com a rotao, ou seja:
Pc = k c = Constante
(2.2.4.2)
A figura 2.4 mostra este caso.
CTC - Centro de Treinamento de Clientes
161
Mdulo 1 Comando e Proteo
M = Conjugado resistente de carga proporcional a n-1 P = Potncia de carga constante Figura 2.4 Exemplos de cargas com conjugado hiperblico: Bobinadeira de papel (normalmente usa-se motor CC); Bobinadeira de pano (normalmente usa-se motor CC); Descascador de toras; Tornos (anlise feita com conjugado constante com elevado nmero de manobras, em geral motores de dupla velocidade); Bobinadeira de fios.
2.2.5 CONJUGADOS NO DEFINIDOS
Neste caso no se aplica a equao (2.2.1), pois no pode-se determinar sua equao de maneira precisa, logo tem-se que determinar o seu conjugado utilizando tcnicas de integrao grfica. Na prtica, analisa-se como conjugado constante, pelo mximo valor de torque absorvido. A figura 2.5 mostra este tipo:
Figura 2.5
CTC - Centro de Treinamento de Clientes
162
Mdulo 1 Comando e Proteo
2.3 CONJUGADO RESISTENTE MDIO DA CARGA
Conhecendo-se a curva do conjugado da carga possvel determinar o conjugado mdio. O conhecimento do conjugado mdio importante no clculo do tempo de acelerao. Na figura 2.6 est mostrado uma curva de conjugado e o conjugado mdio da carga.
Figura 2.6 Curva de Conjugados de Cargas O conjugado mdio da carga pode ser obtido graficamente, bastando que se observe que a rea B1 seja igual a rea B2. Analiticamente o conjugado mdio da carga pode ser calculado como segue: O conjugado da carga dado pela expresso (2.2.1), ou seja:
C c = C0 + ( k c n x )
(2.3.1)
Para x = 0, 1, 2 o conjugado mdio pode ser calculado como:
Ccmd =
1 n.2 n.1
n1
n2
Cc .dn
Ccmd =
1 n.2 n.1
n1
n2
(C0 + k c n x ).dn
Ccmd
n1 1 1 x +1 (C0 n) + = kc n n.2 n.1 x +1 n2
x +1 n2 n1x +1 1 Ccmd = C0 + k c n n x + 1 1 2
(2.3.2)
Quando a carga parte do REPOUSO, tem-se n1 = 0, logo:
CTC - Centro de Treinamento de Clientes
163
Mdulo 1 Comando e Proteo
x n2 Ccmd = C0 + k c x +1
(2.3.3)
Portanto, tem-se:
1)
Para cargas de conjugado constante (x = 0);
Ccmd = C0 + k c = Constante
(2.3.4)
2)
Para cargas de conjugado linear (x = 1);
1 Ccmd = C0 + k c n2 2
(2.3.5)
3)
Para cargas de conjugado quadrtico (x = 2);
1 2 Ccmd = C0 + k c n2 3
(2.3.6)
4)
Para cargas de conjugado hiperblico (x = -1);
Neste caso o conjugado dado pela expresso (2.3.8), ou seja:
Cc = kc n
(2.3.7)
Supondo que a rotao da carga varia entre n1 e n2, figura 2.7, o conjugado mdio de carga dado por: n2 k 1 c C cmd = .dn n 1 n 2 n1 n C cmd =
n2 kc ln n n 2 n1 1
(2.3.8)
Figura 2.7 Conjugado resistente mdio para x = -1
CTC - Centro de Treinamento de Clientes
164
Mdulo 1 Comando e Proteo
2.4 MOMENTO DE INRCIA DA CARGA
O momento de inrcia da carga acionada uma das caractersticas fundamentais para o estudo da aplicao do motor eltrico. Tanto o momento do motor como da carga afetam o tempo de acelerao do motor. O momento de inrcia a grandeza que mede a "resistncia" que um corpo oferece uma mudana em seu movimento de rotao em torno de um dado eixo. Depende do eixo de rotao, da forma do corpo e da maneira como sua massa distribuida. 2 A unidade do momento de inrcia no sistema SI o kgm . O momento de inrcia de uma mquina, que tem rotao diferente da do motor (figura 2.8), dever ser referido ao eixo do motor conforme expresso:
nC J ce = J c n N
2
(2.4.1)
Onde:
Jce Jc
= Momento de inrcia da carga referida ao eixo do motor em kgm2; = Momento de inrcia da carga em kgm2.
Figura 2.8 Momento de inrcia em rotaes diferentes A inrcia total vista pelo motor ser:
J t = J m + J ce
(2.4.2)
Obs.: Uma grandeza muito usada para medir o momento de inrcia o "Momento de Impulso", conhecido como GD2 da carga, expresso em kgm2. Sua relao com o momento de inrcia dado por:
J=
GD 2 4
(2.4.3)
CTC - Centro de Treinamento de Clientes
165
Mdulo 1 Comando e Proteo
2.5 CONJUGADO X VELOCIDADE DO MOTOR
O motor de induo tem conjugado igual a zero velocidade sncrona. medida que a carga vai aumentando, a rotao do motor vai caindo gradativamente, at um ponto em que o conjugado atinge o valor mximo que o motor capaz de desenvolver. Se o conjugado da carga aumentar mais, a rotao do motor cai bruscamente, podendo chegar a travar o rotor. Representando num grfico a variao do conjugado com a velocidade para um motor, obtm-se uma curva com o aspecto representado na figura 2.9.
Figura 2.9 Curva Conjugado x Velocidade Nesta curva vamos destacar e definir alguns pontos importantes. Os valores dos conjugados relativos a estes pontos so especificados por norma (NBR 7094) e sero apresentados a seguir:
2.5.1 CONJUGADO BSICO
o conjugado calculado em funo da potncia e velocidade sncrona.
Cb = Pn 2. .nS
Onde:
Cb nS Pn
= Conjugado base em Nm; = Rotao sncrona em rps; = Potncia nominal em W.
2.5.2 CONJUGADO NOMINAL OU DE PLENA CARGA
o conjugado desenvolvido pelo motor potncia nominal, sob tenso e frequncia nominais.
CTC - Centro de Treinamento de Clientes
166
Mdulo 1 Comando e Proteo
Cn =
Pn 2. .n N
Onde:
Cn nN Pn
= Conjugado Nominal em Nm; = Rotao nominal em rps; = Potncia nominal em W.
2.5.3 CONJUGADO COM ROTOR BLOQUEADO
Tambm denominado "Conjugado de Partida" ou "Conjugado de Arranque". o conjugado mnimo desenvolvido pelo motor com rotor bloqueado. O valor do conjugado de partida depende do projeto do motor e normalmente encontrado no catlogo ou na folha de dados do motor. O conjugado de partida pode ser expresso em Nm ou mais comumente em porcentagem do conjugado nominal, ou seja:
C P (% ) = C P ( Nm) 100 C n ( Nm)
Obs.: Na prtica, o conjugado de rotor bloqueado deve ser o mais alto possvel para que o motor possa vencer a inrcia inicial da carga e possa acelera-la rapidamente, principalmente quando a partida com tenso reduzida. 2.5.4 CONJUGADO MNIMO
o menor conjugado desenvolvido pelo motor ao acelerar desde a velocidade zero at a velocidade correspondente ao conjugado mximo. Na prtica, este valor no deve ser muito baixo, isto , a curva no deve apresentar uma depresso acentuada na acelerao, para que a partida no seja muito demorada, sobreaquecendo o motor, especialmente nos casos de alta inrcia ou partida com tenso reduzida. O conjugado mnimo tambm pode ser expresso em Nm ou em porcentagem do conjugado nominal.
2.5.5 CONJUGADO MXIMO
o maior conjugado desenvolvido pelo motor, sob tenso e freqncia nominais, sem queda brusca de velocidade. Na prtica, o conjugado mximo deve ser o mais alto possvel, por duas razes principais: a) motor deve ser capaz de vencer eventuais picos de carga, como pode acontecer em certas aplicaes, como por exemplo: britadores, misturadores, calandras e outras. b) motor no deve perder bruscamente a velocidade quando ocorrem momentaneamente quedas excessivas de tenso.
CTC - Centro de Treinamento de Clientes
167
Mdulo 1 Comando e Proteo
O conjugado mximo normalmente expresso em porcentagem do conjugado nominal.
C mx (%) = C mx ( Nm) C n ( Nm)
2.5.6 FATORES DE CORREO DOS CONJUGADOS EM FUNO DA TENSO
Quando a tenso aplicada ao motor for diferente da nominal, os conjugados e a corrente de partida devero ser corrigidos. A correo deve ser feita atravs de fatores de multiplicao k1, para a corrente de partida, e k2 para os conjugados CP e Cmx, tiradas da figura 2.10.
Um / Un Figura 2.10 Fatores de reduo k1 e k2 em funo das relaes de tenso do motor e da rede Um / Un Portanto:
Ip I n Ip k = 1 I U n U n U n
CP CP C = k2 C n U n
C mx C mx C = k2 C n U n U n
CTC - Centro de Treinamento de Clientes
168
Mdulo 1 Comando e Proteo
2.6 CONJUGADO MOTOR MDIO
O conjugado mecnico no eixo do motor dado pela expresso abaixo:
CM
3.R2 .I 22 = 2. .n S .S
(2.6.1)
Onde:
R2 I2 S nS
= Resistncia de fase do rotor em Ohm; = Corrente de fase do rotor em A; = Escorregamento do motor em p.u; = Rotao sncrona.
A equao (2.6.1) representa a curva de conjugado do motor, que aps algumas simplificaes pode ser representado pela expresso:
CM = A ( B n) (C n 2 ) ( D n) + E
(2.6.2)
Onde:
CM n A,B,C,D,E
= Conjugado motor em Nm. = Rotao do motor em rps. = Constantes positivas que dependem do projeto do motor.
O valor das constantes dependem do estado de saturao magntica do ncleo do motor. Representando a equao (2.6.2) em um grfico, obtem-se a curva caracterstica do conjugado do motor, figura 2.11:
Figura 2.11 Conjugado motor mdio Analiticamente o conjugado motor mdio pode ser calculado pela integral:
CTC - Centro de Treinamento de Clientes
169
Mdulo 1 Comando e Proteo
C mmd =
1 n2 n1
n1
n2
(C n
A ( B n) (2.6.3) 2 ) ( D n) + E
Como esta integral muito difcil de ser resolvida, na prtica feita a integrao grfica. Isto no muito complicado, basta que se observe que a soma das reas A1 e A2 seja igual a rea A3 (ver figura 2.11). Usualmente tem-se:
a) Para motores categorias N e H:
C P C mx C mmd = 0,45 C + C Cn n n
b) Para motores categoria D:
C mmd = 0,60 CP Cn Cn
(2.6.4)
(2.6.5)
Quando o conjugado nominal (Cn) dado em kgfm, basta multiplicar por 9,81 para obtermos em Nm.
CTC - Centro de Treinamento de Clientes
170
Mdulo 1 Comando e Proteo
2.7 TEMPO DE ROTOR BLOQUEADO (TRB)
Tempo de rotor bloqueado o tempo necessrio para que o enrolamento da mquina, quando percorrido pela sua corrente de partida, atinja a sua temperatura limite, partindo da temperatura atingida em condies nominais de servio e considerando a temperatura ambiente no seu valor mximo. Este tempo um parmetro que depende do projeto da mquina. Encontra-se normalmente no catlogo ou na folha de dados do fabricante. A tabela (2.7.1) mostra os valores limites da temperatura de rotor bloqueado, de acordo com as normas NEMA e IEC.
CLASSE TRMICA TMAX NEMA MG1.12.53 IEC 60079-7 TMAX
B F
175 200 225
185 210 235
80 105 125
Tabela 2.7.1 Temperatura limite de rotor bloqueado. Para partidas com tenso reduzida o tempo de rotor bloqueado pode ser corrigido como segue:
Un t rb = tb U r
2
(2.7.1)
Onde: trb tb Un Ur
2.7.1
= Tempo de rotor bloqueado com tenso reduzida; = Tempo de rotor bloqueado tenso nominal; = Tenso nominal; = Tenso reduzida.
TEMPO DE ROTOR BLOQUEADO EM RELAO A CLASSE ISOLANTE
Os tempos de rotor bloqueado apresentados em catlogos esto referenciados ao isolante classe B. Ao trocar-se o isolante para uma classe superior, pode-se aumentar o tempo de rotor bloqueado (trb), da seguinte maneira: t rb = Onde: k TMX TMOTOR (Ip/In)
CTC - Centro de Treinamento de Clientes
TMX TAMB TMOTOR k
-4 2
= 5,52 X 10 .[(Ip/In).J1] = Temperatura mxima da classe para curta durao (picos de temperatura). = Elevao de temperatura do motor. = Relao da corrente de partida.
171
Mdulo 1 Comando e Proteo
J1 TAMB
= Densidade de corrente do motor. = Temperatura ambiente.
A tabela (2.7.1) apresenta os valores limites para TMX e TMX, para cada classe de isolante utilizada. Pode-se notar que o tempo de rotor bloqueado inversamente proporcional a 2 2 (Ip/ In) ou J1 . Exemplos: Classe F em relao a classe B:
t rb ( F) t rb ( B) 210 40 80 90 k = = = 1,3846 185 40 80 65 k
Portanto: trb(F) = 1,3846.trb(B) Classe H em relao a classe B: t rb ( H ) t rb ( B) 235 40 80 115 k = = = 1,7692 185 40 80 65 k
Portanto: trb(H) = 1,7692.trb(B) Classe H em relao a classe F: t rb ( H ) t rb ( B) 235 40 80 115 k = = = 1,2778 210 40 80 90 k
Portanto: trb(H) = 1,2778.trb(F)
2.7.2 TEMPO DE ACELERAO
Tempo de acelerao o tempo que o motor leva para acionar a carga desde a rotao zero at a rotao nominal. O tempo de acelerao permite verificar se o motor consegue acionar a carga dentro das condies exigidas pela estabilidade trmica do material isolante. O tempo de acelerao tambm um parmetro til para dimensionar o equipamento de partida e o sistema de proteo. O ideal seria que o tempo de acelerao fosse bem menor que o tempo de rotor bloqueado. Quando no pode ser muito menor, pelo menos deve obedecer a relao abaixo: ta < trb x 0.8
CTC - Centro de Treinamento de Clientes
(2.7.2.1)
172
Mdulo 1 Comando e Proteo
Onde:
trb = tempo mximo de rotor bloqueado.
Para um movimento de rotao vlida a relao:
CA = J dw dt
(2.7.2.2)
Onde:
J CA w
= momento de inrcia do corpo em kgm2; = conjugado acelerador em Nm; = velocidade angular em rad/s.
A velocidade angular pode ser calculada por:
w = 2. .n
(2.7.2.3)
Para o caso em que o motor deve acionar uma carga, tem-se: J = Jt = Jm + Jce Onde: (2.7.2.4)
Jt = inrcia total referida ao eixo do motor (2.4.2).
O conjugado acelerador pode ser substitudo sem perda de preciso pelo conjugado acelerador mdio dado por: CAMD = Cmmd Crmd Onde: Crmd = R x Ccmd O grfico da figura 2.12, mostra o conjugado acelerador mdio. (2.7.2.5)
Figura 2.12 Conjugado acelerador mdio
CTC - Centro de Treinamento de Clientes
173
Mdulo 1 Comando e Proteo
Substituindo (2.7.2.3), (2.7.2.4) e (2.7.2.5) em (2.7.2.2), tem-se:
C mmd C rmd = ( J m J ce ) 2. dn dt
(2.7.2.6)
Portanto:
dt = 2. .
J m + J ce dn C mmd C rmd
ta
(2.7.2.7)
n
Integrando, tem-se:
J m + J ce dt = 2. . Cmmd C rmd 0
dn
0
J m + J ce t a = 2. .n C mmd Crmd
(2.7.2.8)
2.7.3 POTNCIA DINMICA OU DE ACELERAO
O tempo de acelerao sempre deve ser menor que o tempo de rotor bloqueado do motor. A potncia dinmica a potncia necessria para acelerar a carga at a rotao nominal em um intervalo de tempo menor que o tempo de rotor bloqueado. Esta potncia, na medida do possvel, deve ser igual potncia nominal do motor. Porm dependendo das caractersticas da carga (inrcia e conjugado), a potncia dinmica pode assumir valores bem maiores que a potncia nominal. Nestes casos dever ser feito um estudo TCNICO-ECONMICO, para ver se possvel utilizar um acoplamento especial tal como hidrulico, eletromagntico ou de frico (embreagem). Dependendo do estudo tcnico-econmico pode tornar-se evidente que a melhor soluo seria um outro tipo de motor, por exemplo um motor de anis ou motor de gaiola acionado por conversor de frequncia.
CTC - Centro de Treinamento de Clientes
174
Mdulo 1 Comando e Proteo
TABELA 2.7.3.1 TEMPO DE ACELERAO MOTOR DE INDUO
Conj. Resistente de carga Curva: Conjugado X Rotao Constante Linear Parablico Hiperblico
Exemplos de Aplicao
Compressores pisto Talhas Bombas pisto Britadores Transportadores contnuos
N H Ccn
Calandras Bombas de vcuo
Bombas centrfugas Ventiladores, Misturadores centrfugos Compressor centrfugo
N
Bobinadeira de fios, panos e papel Descascador de toras Tornos
Corrente Contnua
Categoria do motor acionador
N H
Conjugado de Carga mdio (Ccmd)
OBS:
Compressor a parafuso 1,15.Ccn
C 0 + C cn 2
2C 0 + C cn 3
2
Ccn n N n N . ln n n N n1 1
Momento de inrcia da carga referida ao motor Relao de transmisso Conjugado resistente mdio Conjugado motor mdio D N/H
nC J ce = J c n N nC R= nN
Crmd = R Ccmd C P Cmx Cmmd = 0,45 Cn (9,81) C + C n n CP Cmmd = 0,60 Cn (9,81) C n J m + J ce t a = 2. .n N C mmd C rmd
J = momento de inrcia (kgm2) C = Conjugado (Nm) De B para F
Tempo de acelerao Unidades
n = rotao (rps) t = tempo (s)
trb(F) = 1,3846.trb(B) trb(H) = 1,2778.trb(F) trb(H) = 1,7692.trb(B)
Quando deseja-se mudar de classe de isolamento
De F para H De B para H
CTC - Centro de Treinamento de Clientes
175
Potrebbero piacerti anche
- Apostila de Instalações Elétricas Industriais - AlunoDocumento74 pagineApostila de Instalações Elétricas Industriais - AlunoFelipe Oliveira100% (1)
- 33 Analise de Lubrificantes Por Meio Da Tecnica FerrograficaDocumento10 pagine33 Analise de Lubrificantes Por Meio Da Tecnica FerrograficaFelipe OliveiraNessuna valutazione finora
- Lista 1Documento2 pagineLista 1Felipe OliveiraNessuna valutazione finora
- Crítica Da Razão PuraDocumento2 pagineCrítica Da Razão PuraFelipe OliveiraNessuna valutazione finora
- Sistema de Carga e Partida PDFDocumento81 pagineSistema de Carga e Partida PDFFelipe Oliveira100% (2)
- Como Instalar o Xampp No LinuxDocumento10 pagineComo Instalar o Xampp No LinuxFelipe OliveiraNessuna valutazione finora
- Rtaa NacionalDocumento54 pagineRtaa NacionalEduardo Luis Souza100% (1)
- 3504ADocumento95 pagine3504ALuis Manuel Santos100% (3)
- BombaDocumento104 pagineBombaorlandres100% (1)
- Bombas Compressores TurbinasDocumento35 pagineBombas Compressores Turbinasmauro_castroNessuna valutazione finora
- Motor Maxion 2.5 TDDocumento91 pagineMotor Maxion 2.5 TDRodrigo Hirschmann84% (25)
- Festo Didactic - PneumáticaDocumento81 pagineFesto Didactic - PneumáticaAmanda Herbster100% (3)
- Seguranca Com ArcofilDocumento15 pagineSeguranca Com ArcofilGiovane GuzzoNessuna valutazione finora
- 12 - Chave de Fluxo Ou FluxostatoDocumento4 pagine12 - Chave de Fluxo Ou FluxostatoFabioPaixaoNessuna valutazione finora
- Casos de Sucesso - MultibrasDocumento4 pagineCasos de Sucesso - MultibrasdurbcomsonoNessuna valutazione finora
- Resumo de MCIDocumento45 pagineResumo de MCIJeremy ByersNessuna valutazione finora
- Manual Modernitt TotalineDocumento40 pagineManual Modernitt TotalineagassisrNessuna valutazione finora
- Victory PDFDocumento20 pagineVictory PDFEdnilson dos Santos100% (1)
- 19xr 4ss (Port) Centrifuga CarrierDocumento136 pagine19xr 4ss (Port) Centrifuga CarrierAndréNeves100% (1)
- Trabalho Compressores 2Documento16 pagineTrabalho Compressores 2Tamara FélixNessuna valutazione finora
- Manual de Reparo Vectra NovoDocumento41 pagineManual de Reparo Vectra NovoDaniel100% (2)
- Manual RC27 28Documento16 pagineManual RC27 28Tony FernandesNessuna valutazione finora
- Ar Condicionado CRVDocumento40 pagineAr Condicionado CRVNelson Antonio De Souza MendesNessuna valutazione finora
- 02 - Valvulas de Seguranca e Alivio PARTE 2Documento92 pagine02 - Valvulas de Seguranca e Alivio PARTE 2orea1Nessuna valutazione finora
- SomBinário - Cubase Tutorial - Masterização No CubaseDocumento10 pagineSomBinário - Cubase Tutorial - Masterização No CubasePezaobatera0% (1)
- Controlador Inova Resfriador de Leite 9604 PDFDocumento2 pagineControlador Inova Resfriador de Leite 9604 PDFPauloVitor100% (1)
- Cat Package Baixa1 PDFDocumento16 pagineCat Package Baixa1 PDFEveraldo MoraesNessuna valutazione finora
- Manual de Instalação ZR ZT 160-275Documento38 pagineManual de Instalação ZR ZT 160-275Leandro GouvêaNessuna valutazione finora
- 256.08.709 - IOM Multisplit 40MSD-C-09-13 (View)Documento56 pagine256.08.709 - IOM Multisplit 40MSD-C-09-13 (View)Leandro Sant'AnnaNessuna valutazione finora
- Relatório Refrigeração e Ar CondicionadoDocumento25 pagineRelatório Refrigeração e Ar CondicionadoFri Sil Id0% (1)
- Man DFF44Documento32 pagineMan DFF44guliver88% (8)
- Manual Do Simulador de Refrigeracao - Versao 2Documento30 pagineManual Do Simulador de Refrigeracao - Versao 2engfabianof100% (1)
- Noções Básicas de Bombas Industriais, Turbinas A Vapor e CompressoresDocumento24 pagineNoções Básicas de Bombas Industriais, Turbinas A Vapor e CompressoresElton LacerdaNessuna valutazione finora
- Implantacao de Planos de Manutençao PreditivaDocumento12 pagineImplantacao de Planos de Manutençao PreditivamagtrolNessuna valutazione finora