Potrebbero piacerti anche
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- IRF7807VD2: Fetky™ Mosfet / Schottky DiodeDocumento9 pagineIRF7807VD2: Fetky™ Mosfet / Schottky DiodeMartin TorresNessuna valutazione finora
- 4-5 EE462L MOSFET Firing CircuitDocumento44 pagine4-5 EE462L MOSFET Firing Circuitbal3xNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Properly Sizing Mosfets For PWM ControllersDocumento15 pagineProperly Sizing Mosfets For PWM ControllersTaqi SyedNessuna valutazione finora
- LMC555 CMOS Timer: General Description FeaturesDocumento10 pagineLMC555 CMOS Timer: General Description FeaturesJeremy ObriotNessuna valutazione finora
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsDa EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNessuna valutazione finora
- Datasheet PDFDocumento10 pagineDatasheet PDFVenkatesh VakamulluNessuna valutazione finora
- LMC555 CMOS Timer: General Description FeaturesDocumento12 pagineLMC555 CMOS Timer: General Description FeaturesNicolas FontanaNessuna valutazione finora
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsDa EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsValutazione: 3.5 su 5 stelle3.5/5 (6)
- RT9202Documento16 pagineRT9202bachet56Nessuna valutazione finora
- N-Channel Enhancement-Mode Silicon Gate: Semiconductor Technical DataDocumento8 pagineN-Channel Enhancement-Mode Silicon Gate: Semiconductor Technical Datameroka2000Nessuna valutazione finora
- Irf7811Avpbf Irf7811Avpbf: Absolute Maximum RatingsDocumento6 pagineIrf7811Avpbf Irf7811Avpbf: Absolute Maximum RatingsnewmailsNessuna valutazione finora
- NTMD6N03R2 Power MOSFET: 30 V, 6 A, Dual N Channel SOIC 8Documento8 pagineNTMD6N03R2 Power MOSFET: 30 V, 6 A, Dual N Channel SOIC 8RjibNessuna valutazione finora
- Mosfet Gate DriveDocumento6 pagineMosfet Gate DrivegubiliNessuna valutazione finora
- MTP3055Documento9 pagineMTP3055lisandroantonNessuna valutazione finora
- Linear Technology LTC3728EG28400Documento37 pagineLinear Technology LTC3728EG28400Rickz2k8Nessuna valutazione finora
- MTP52N06V Datasheet - 2 PDFDocumento7 pagineMTP52N06V Datasheet - 2 PDFLeonel ValençaNessuna valutazione finora
- Stp7Nk80Z - Stp7Nk80Zfp STB7NK80Z - STB7NK80Z-1Documento18 pagineStp7Nk80Z - Stp7Nk80Zfp STB7NK80Z - STB7NK80Z-1queequeg73Nessuna valutazione finora
- Application Note 9017 Manufacturing Technology of A Small Capacity Inverter Using A Fairchild IGBTDocumento28 pagineApplication Note 9017 Manufacturing Technology of A Small Capacity Inverter Using A Fairchild IGBTRajesh VyasNessuna valutazione finora
- Infineon-Application Note Applications For Depletion MOSFETs-An-V01 00-EnDocumento13 pagineInfineon-Application Note Applications For Depletion MOSFETs-An-V01 00-EnP.r. Nuwan TharakaNessuna valutazione finora
- FSDM07652R DatasheetDocumento16 pagineFSDM07652R Datasheetmarianos67Nessuna valutazione finora
- Irf7832Pbf: V R Max QGDocumento10 pagineIrf7832Pbf: V R Max QGdreyes3773Nessuna valutazione finora
- An-978 HV Floating MOS Gate DriversDocumento21 pagineAn-978 HV Floating MOS Gate DriversPeter RueNessuna valutazione finora
- I GB T ApplicationDocumento17 pagineI GB T ApplicationSachin ThomasNessuna valutazione finora
- Mtw8n60e DDocumento9 pagineMtw8n60e DAtiqurrehman UmairNessuna valutazione finora
- 161 20551 0 FS7M0880Documento16 pagine161 20551 0 FS7M0880Edwin Vitovis TorresNessuna valutazione finora
- L6 - Gate Drive and SnubbersDocumento66 pagineL6 - Gate Drive and SnubberssrnankitNessuna valutazione finora
- Irf 7832Documento10 pagineIrf 7832Nguyễn Minh TúNessuna valutazione finora
- SG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorDocumento10 pagineSG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorJayesh SuryavanshiNessuna valutazione finora
- Infineon-Application Note Applications For Depletion MOSFETs-AN-v01 00-ENDocumento10 pagineInfineon-Application Note Applications For Depletion MOSFETs-AN-v01 00-ENvictorhugoseNessuna valutazione finora
- Float DriveDocumento24 pagineFloat DriveEdy AchalmaNessuna valutazione finora
- LMC555 CMOS Timer: Literature Number: SNAS558HDocumento14 pagineLMC555 CMOS Timer: Literature Number: SNAS558HIvr FloresNessuna valutazione finora
- N-Channel Enhancement-Mode Silicon Gate: Semiconductor Technical DataDocumento8 pagineN-Channel Enhancement-Mode Silicon Gate: Semiconductor Technical Datauim0% (1)
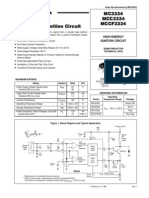
- Datasheet MC3334Documento6 pagineDatasheet MC3334odipasNessuna valutazione finora
- 1 To 5 ManualDocumento30 pagine1 To 5 ManualRoshan DodiyaNessuna valutazione finora
- An-990 Application Characterization of IGBT'sDocumento31 pagineAn-990 Application Characterization of IGBT'sVasco RodriguesNessuna valutazione finora
- Ncl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsDocumento10 pagineNcl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsKhúc Hành QuânNessuna valutazione finora
- Isolated Mosfet Gate Driver PaperDocumento6 pagineIsolated Mosfet Gate Driver PapergenwittsNessuna valutazione finora
- IGBT BasicsDocumento20 pagineIGBT Basicsscrewyou2222Nessuna valutazione finora
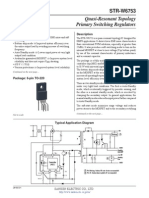
- STR W6753 DatasheetDocumento8 pagineSTR W6753 DatasheetjgerabmNessuna valutazione finora
- An786 (Driving Power Mosfet)Documento8 pagineAn786 (Driving Power Mosfet)Rody GCNessuna valutazione finora
- MLP2N06CL Smartdiscretes Mosfet 2 Amps, 62 Volts, Logic LevelDocumento9 pagineMLP2N06CL Smartdiscretes Mosfet 2 Amps, 62 Volts, Logic LevelEcurepair BrasilNessuna valutazione finora
- An 6069 PDFDocumento12 pagineAn 6069 PDFprasannaNessuna valutazione finora
- Parasitic Turn On of Sic Mosfets Turning A Bug Into FeatureDocumento9 pagineParasitic Turn On of Sic Mosfets Turning A Bug Into Featureelmarvin22Nessuna valutazione finora
- 2A, 2Mhz, Synchronous Step-Down Converter: General Description FeaturesDocumento13 pagine2A, 2Mhz, Synchronous Step-Down Converter: General Description FeaturesCesar TemocheNessuna valutazione finora
- Low-Voltage CMOS Analog Bootstrapped Switch For Sample-and-Hold Circuit: Design and Chip CharacterizationDocumento4 pagineLow-Voltage CMOS Analog Bootstrapped Switch For Sample-and-Hold Circuit: Design and Chip CharacterizationwhamcNessuna valutazione finora
- Massachusetts Institute of Technology Department of Electrical Engineering and Computer ScienceDocumento7 pagineMassachusetts Institute of Technology Department of Electrical Engineering and Computer ScienceFernando Sánchez HernándezNessuna valutazione finora
- IGBT/MOSFET Gate Drive Optocoupler: Optocouplers and Solid-State RelaysDocumento9 pagineIGBT/MOSFET Gate Drive Optocoupler: Optocouplers and Solid-State Relaysme1816Nessuna valutazione finora
- Bit 3713Documento24 pagineBit 3713neckoprvak5Nessuna valutazione finora
- Application Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Documento16 pagineApplication Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Malanie Sriya De SilvaNessuna valutazione finora
- DatasheetDocumento8 pagineDatasheetAri PutraNessuna valutazione finora
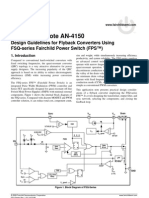
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Documento16 pagineApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNessuna valutazione finora
- Power Electronics LabDocumento51 paginePower Electronics LabManoharan ManuNessuna valutazione finora
- Datasheet L6229Documento25 pagineDatasheet L6229Raul Sense MejiaNessuna valutazione finora
- RT9214Documento17 pagineRT9214levimolnarNessuna valutazione finora
- IGBT Characteristic CurveDocumento17 pagineIGBT Characteristic CurveSanaKayaniNessuna valutazione finora
- Only Fools and Horses - Season 1Documento1 paginaOnly Fools and Horses - Season 1jesse_w_peters100% (1)
- 0024 Tdp2 FMTV ModelingDocumento175 pagine0024 Tdp2 FMTV Modelingjesse_w_petersNessuna valutazione finora
- Homework 1 2014Documento1 paginaHomework 1 2014jesse_w_petersNessuna valutazione finora
- Table Thread ReferenceDocumento40 pagineTable Thread Referencejesse_w_petersNessuna valutazione finora
- Tim Keller Knowing GodDocumento4 pagineTim Keller Knowing Godjesse_w_petersNessuna valutazione finora
- Tim Keller Knowing GodDocumento4 pagineTim Keller Knowing Godjesse_w_petersNessuna valutazione finora
- Modern Residential Housing in UAEDocumento15 pagineModern Residential Housing in UAEBee Dan BudhachettriNessuna valutazione finora
- Kia September 2020 Price List: Picanto ProceedDocumento2 pagineKia September 2020 Price List: Picanto ProceedCaminito MallorcaNessuna valutazione finora
- Agricultural Extension and CommunicationDocumento173 pagineAgricultural Extension and CommunicationAlfredo Conde100% (1)
- AS-Interface Devices: (Slave Modules)Documento48 pagineAS-Interface Devices: (Slave Modules)Muhamad PriyatnaNessuna valutazione finora
- MS 005 For DUCT FABRICATION - INSULATION & INSTALLATION REV-1Documento21 pagineMS 005 For DUCT FABRICATION - INSULATION & INSTALLATION REV-1vusal huseynli100% (2)
- Exact Solution Tank DrainageDocumento8 pagineExact Solution Tank DrainageFelipe CastNessuna valutazione finora
- P eDocumento22 pagineP eKiks AshNessuna valutazione finora
- Agricultural Machinery in PakistanDocumento19 pagineAgricultural Machinery in PakistanBadar NiaziNessuna valutazione finora
- Bryophytes MorphologyDocumento9 pagineBryophytes Morphologyrachna singh0% (1)
- Https - Threejs - Org - Examples - Webgl - Fire - HTMLDocumento9 pagineHttps - Threejs - Org - Examples - Webgl - Fire - HTMLMara NdirNessuna valutazione finora
- EclipseDocumento6 pagineEclipsetoncipNessuna valutazione finora
- (Rect-15) Experimental Study On Partial Replacement of Cement With Coconut Shell Ash in ConcreteDocumento3 pagine(Rect-15) Experimental Study On Partial Replacement of Cement With Coconut Shell Ash in Concretefrancis dimakilingNessuna valutazione finora
- SCM 025-108 M2Documento8 pagineSCM 025-108 M2kazdanoNessuna valutazione finora
- AD&D - Forgotten Realms - Menzoberranzan - EXTRAS - House Do'Urden RestrospectiveDocumento16 pagineAD&D - Forgotten Realms - Menzoberranzan - EXTRAS - House Do'Urden RestrospectiveThiago RaulinoNessuna valutazione finora
- Flap Designs For Flap Advancement During Implant Therapy A Systematic Review 2016 PDFDocumento8 pagineFlap Designs For Flap Advancement During Implant Therapy A Systematic Review 2016 PDFRohit ShahNessuna valutazione finora
- University of LeedsDocumento20 pagineUniversity of LeedsYasir KhanNessuna valutazione finora
- Anti-Cellulite: Endermologie TreatmentDocumento8 pagineAnti-Cellulite: Endermologie TreatmentMinu CatalinNessuna valutazione finora
- UNDP NP Dhangadhi SWM TOR FinalDocumento4 pagineUNDP NP Dhangadhi SWM TOR FinalNirmal K.c.Nessuna valutazione finora
- L23 - Axial Flow CompressorDocumento17 pagineL23 - Axial Flow CompressorRohan GuptaNessuna valutazione finora
- Tyre Industry in IndiaDocumento14 pagineTyre Industry in IndiaH Janardan PrabhuNessuna valutazione finora
- Flooding Deagon Flood Flag MapDocumento1 paginaFlooding Deagon Flood Flag MapNgaire TaylorNessuna valutazione finora
- Modeling of Conducted EMI (Model Motor Simulink Bun)Documento8 pagineModeling of Conducted EMI (Model Motor Simulink Bun)Ioan ŢileaNessuna valutazione finora
- 8Documento3 pagine8Anirban Dasgupta100% (1)
- IbnTaymiyyah Theological EthicsDocumento361 pagineIbnTaymiyyah Theological EthicsDado Daki100% (1)
- Chapter 1 Cumulative Review: Multiple ChoiceDocumento2 pagineChapter 1 Cumulative Review: Multiple ChoiceJ. LeeNessuna valutazione finora
- EOCR 종합 EN 2015 PDFDocumento228 pagineEOCR 종합 EN 2015 PDFShubhankar KunduNessuna valutazione finora
- 510 1453 1 PB Tiang ReklameDocumento6 pagine510 1453 1 PB Tiang ReklameGunaedy UtomoNessuna valutazione finora
- Genesis of KupferschieferDocumento15 pagineGenesis of KupferschieferMaricela GarciaNessuna valutazione finora
- Evaluation of Global Research Trends in The Area of Food Waste D - 2020 - Food CDocumento10 pagineEvaluation of Global Research Trends in The Area of Food Waste D - 2020 - Food CAliNessuna valutazione finora
- Module 1 Hvac Basics Chapter-1Documento5 pagineModule 1 Hvac Basics Chapter-1KHUSHBOONessuna valutazione finora
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsDa EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsValutazione: 5 su 5 stelle5/5 (3)
- Chip War: The Fight for the World's Most Critical TechnologyDa EverandChip War: The Fight for the World's Most Critical TechnologyValutazione: 4.5 su 5 stelle4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDa EverandChip War: The Quest to Dominate the World's Most Critical TechnologyValutazione: 4.5 su 5 stelle4.5/5 (229)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsDa EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongNessuna valutazione finora
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Da EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Valutazione: 5 su 5 stelle5/5 (2)
- Samsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneDa EverandSamsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneNessuna valutazione finora
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Da EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Valutazione: 5 su 5 stelle5/5 (2)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Da EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Valutazione: 5 su 5 stelle5/5 (3)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Da EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Valutazione: 5 su 5 stelle5/5 (1)
- CompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Da EverandCompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Nessuna valutazione finora
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XDa EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XValutazione: 3 su 5 stelle3/5 (2)
- Computer Science: A Concise IntroductionDa EverandComputer Science: A Concise IntroductionValutazione: 4.5 su 5 stelle4.5/5 (14)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionDa EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionValutazione: 5 su 5 stelle5/5 (2)
- Jensen Huang's Nvidia: Processing the Mind of Artificial IntelligenceDa EverandJensen Huang's Nvidia: Processing the Mind of Artificial IntelligenceNessuna valutazione finora
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideDa EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideNessuna valutazione finora
- Arduino and Raspberry Pi Sensor Projects for the Evil GeniusDa EverandArduino and Raspberry Pi Sensor Projects for the Evil GeniusNessuna valutazione finora
- A Beginner's Guide To IPhone 14 Pro Max Mastering: The Comprehensive User Guide And Illustrated Owner's Manual With Tips And Advanced Tricks For New BeDa EverandA Beginner's Guide To IPhone 14 Pro Max Mastering: The Comprehensive User Guide And Illustrated Owner's Manual With Tips And Advanced Tricks For New BeNessuna valutazione finora
- The comprehensive guide to build Raspberry Pi 5 RoboticsDa EverandThe comprehensive guide to build Raspberry Pi 5 RoboticsNessuna valutazione finora
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneDa EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneNessuna valutazione finora
- Debugging Embedded and Real-Time Systems: The Art, Science, Technology, and Tools of Real-Time System DebuggingDa EverandDebugging Embedded and Real-Time Systems: The Art, Science, Technology, and Tools of Real-Time System DebuggingValutazione: 5 su 5 stelle5/5 (1)
- The User's Directory of Computer NetworksDa EverandThe User's Directory of Computer NetworksTracy LaqueyNessuna valutazione finora