Potrebbero piacerti anche
- Automated Landing Aids BY Fazeel Athar Saqib HussainDocumento20 pagineAutomated Landing Aids BY Fazeel Athar Saqib HussainAir Cdre. Wajih Humayun Hashmi Assistant Professor-AviationNessuna valutazione finora
- ADF RDF QuizDocumento27 pagineADF RDF QuizNancy CutinNessuna valutazione finora
- Meterology ProblemsDocumento3 pagineMeterology Problemshrithik kumarNessuna valutazione finora
- 6 Instrument Landing System: 6.1 Principle of OperationDocumento6 pagine6 Instrument Landing System: 6.1 Principle of OperationAnurag MishraNessuna valutazione finora
- VHF Omni-Directional Range (VOR)Documento2 pagineVHF Omni-Directional Range (VOR)Shkelzen Goxhaj100% (1)
- IFR Comms PlaneDocumento18 pagineIFR Comms PlaneAli Sarper SeverNessuna valutazione finora
- IfrDocumento1 paginaIfrlunefiekertNessuna valutazione finora
- IFR Comms IFR Comms: 01 Definitions 01 DefinitionsDocumento18 pagineIFR Comms IFR Comms: 01 Definitions 01 Definitionsredbeard_06Nessuna valutazione finora
- MEC 3766 Present#8 & #9Documento24 pagineMEC 3766 Present#8 & #9Nur AdlinaNessuna valutazione finora
- All Dgca Docs For CPL Conversion WWW - Victortango.inDocumento33 pagineAll Dgca Docs For CPL Conversion WWW - Victortango.invictortango100% (2)
- 7 - CPL Questions FP-2Documento70 pagine7 - CPL Questions FP-2MoshiurRahmanNessuna valutazione finora
- VOR NDB Numerical Test 1Documento13 pagineVOR NDB Numerical Test 1sneha jauhariNessuna valutazione finora
- Revision Question Chapter 11Documento7 pagineRevision Question Chapter 11Sealtiel1020Nessuna valutazione finora
- FlpanDocumento8 pagineFlpanRaveendran Sukumaran PareshnathNessuna valutazione finora
- Jan 2013 TechnicalDocumento11 pagineJan 2013 TechnicalShibin JohneyNessuna valutazione finora
- 2.1 Instrument Landing System (ILS)Documento8 pagine2.1 Instrument Landing System (ILS)gelliott7639Nessuna valutazione finora
- ATC Clearances Quiz With AnswersDocumento11 pagineATC Clearances Quiz With AnswersAaron GuerreroNessuna valutazione finora
- Är Över Bättre Åvan FlygaDocumento668 pagineÄr Över Bättre Åvan Flygaerikjohansson91Nessuna valutazione finora
- VOR PrincipleDocumento11 pagineVOR PrinciplesureshamsNessuna valutazione finora
- Electrics Revision QuestionsDocumento5 pagineElectrics Revision QuestionsIludiran KolaNessuna valutazione finora
- Radio Telephony QUESTION 1Documento10 pagineRadio Telephony QUESTION 1Jhony BhatNessuna valutazione finora
- Cessna 152 POHDocumento21 pagineCessna 152 POHVighnesh VNessuna valutazione finora
- Reg qns1Documento15 pagineReg qns1Hardik MaheshwariNessuna valutazione finora
- Lecture+7+ +Instrument+Landing+SystemDocumento35 pagineLecture+7+ +Instrument+Landing+Systemsarithapriya100% (1)
- THE MACHMETER Chapter 6Documento3 pagineTHE MACHMETER Chapter 6RaghavendraSingh100% (1)
- MLSDocumento50 pagineMLSMuhammad Waqar Aslam ChNessuna valutazione finora
- Cessna 172Documento13 pagineCessna 172Daksh SinghNessuna valutazione finora
- Revision Question Chapter 14-15Documento19 pagineRevision Question Chapter 14-15Sealtiel1020Nessuna valutazione finora
- Flight DeckDocumento8 pagineFlight DeckJyoti vermaNessuna valutazione finora
- Ops-Cat Sorulari Atplde OlmayanDocumento10 pagineOps-Cat Sorulari Atplde OlmayanTayfun TUNAERNessuna valutazione finora
- Aug 10 QuestionDocumento118 pagineAug 10 QuestionRoshan MenonNessuna valutazione finora
- Fte Radiotelephony: The Oral CourseDocumento14 pagineFte Radiotelephony: The Oral CourseMustafa Al ZawawiNessuna valutazione finora
- Jet RevisedDocumento8 pagineJet RevisedDharavGosaliaNessuna valutazione finora
- RADIONAVDocumento29 pagineRADIONAVKer KigenNessuna valutazione finora
- CD Ground ProcDocumento2 pagineCD Ground ProcPethrovski BerlizNessuna valutazione finora
- VFR Communications (135 Soru)Documento18 pagineVFR Communications (135 Soru)Anonymous AKF3VL9Nessuna valutazione finora
- Test Poh 172rDocumento3 pagineTest Poh 172rAmit SharmaNessuna valutazione finora
- FLIGHT OPERATIONS Basic Required KnowledgeDocumento23 pagineFLIGHT OPERATIONS Basic Required KnowledgemiNessuna valutazione finora
- 1.1. ATIS 1.2. Advanced Surface Movement Guidance and Control System (SMGCS) 11.. GgeenneerraallDocumento94 pagine1.1. ATIS 1.2. Advanced Surface Movement Guidance and Control System (SMGCS) 11.. Ggeenneerraallmehul da aviatorNessuna valutazione finora
- VHF Omni RangeDocumento23 pagineVHF Omni RangeFazi Imi100% (1)
- 3.efis Jaa QuestionsDocumento20 pagine3.efis Jaa QuestionschoppingcloudsNessuna valutazione finora
- ISA Conditions: Cas / Ias Tas Mach Lss Constant Increases Increases DecreasesDocumento2 pagineISA Conditions: Cas / Ias Tas Mach Lss Constant Increases Increases DecreasesoleNessuna valutazione finora
- IFR-Communication-JAA ATPL QUESTIONSDocumento35 pagineIFR-Communication-JAA ATPL QUESTIONSAnita MukulaNessuna valutazione finora
- 5.air Data JAA QUESTIONSDocumento31 pagine5.air Data JAA QUESTIONSchoppingcloudsNessuna valutazione finora
- Airspace Quiz With AnswersDocumento9 pagineAirspace Quiz With AnswersMadeleine AguilarNessuna valutazione finora
- Navigation QuestionsDocumento5 pagineNavigation Questionsgregm100% (1)
- Radio AidsDocumento60 pagineRadio AidssagarikaNessuna valutazione finora
- İFR QuestionsDocumento5 pagineİFR QuestionsZulik ZulikNessuna valutazione finora
- Radio NavDocumento5 pagineRadio NavSwapnil KarkiNessuna valutazione finora
- DGCA PAPER 1 by Anand Kumar UpadhyayDocumento11 pagineDGCA PAPER 1 by Anand Kumar UpadhyayRicha LalwaniNessuna valutazione finora
- IR Classes 5Documento2 pagineIR Classes 5Ingrid SavellanoNessuna valutazione finora
- GNAV Questions by LessonDocumento87 pagineGNAV Questions by LessonhananeNessuna valutazione finora
- CPL RNav5 NDB - ADFDocumento5 pagineCPL RNav5 NDB - ADFvivekNessuna valutazione finora
- Altimetro AlunoDocumento10 pagineAltimetro AlunoJose Dias100% (1)
- 070-Operational ProceduresDocumento191 pagine070-Operational ProceduresDaniel MkenyaNessuna valutazione finora
- CPL Procedure NewDocumento5 pagineCPL Procedure NewShibin JohneyNessuna valutazione finora
- AC Gen Knowledge 4 150questions Answered PDFDocumento26 pagineAC Gen Knowledge 4 150questions Answered PDFmoik ojooNessuna valutazione finora
- Chapter 19 - RNAVDocumento8 pagineChapter 19 - RNAVEl Shazly SaidNessuna valutazione finora
- Kord Klax PDFDocumento36 pagineKord Klax PDFCarlitosIbanezNessuna valutazione finora
- LC08 L1TP 114064 20150908 20170404 01 T1 MTLDocumento4 pagineLC08 L1TP 114064 20150908 20170404 01 T1 MTLfaisalganteng11Nessuna valutazione finora
- U 21855 Man SSH 101221Documento50 pagineU 21855 Man SSH 101221nessus123Nessuna valutazione finora
- Trimble RTX Frequently Asked Questions: Transforming The Way The World WorksDocumento20 pagineTrimble RTX Frequently Asked Questions: Transforming The Way The World WorksalsnobNessuna valutazione finora
- EADI SampleDocumento9 pagineEADI Samplealvaro2005100% (1)
- LSZH Apch11 Rwy28 IlsDocumento1 paginaLSZH Apch11 Rwy28 Ilssamykarim2009Nessuna valutazione finora
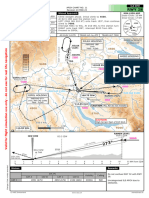
- Vor-Dme Hai Required: Elev. THRDocumento1 paginaVor-Dme Hai Required: Elev. THRRicardo Aguilera T.Nessuna valutazione finora
- Vordme Approach With A320 Ivao PDFDocumento6 pagineVordme Approach With A320 Ivao PDFjsachin1178Nessuna valutazione finora
- Jeppesen Trip KitDocumento19 pagineJeppesen Trip KitKyle BrandonNessuna valutazione finora
- Rnav RWY 08: Goose Bay (GNSS) (DND)Documento8 pagineRnav RWY 08: Goose Bay (GNSS) (DND)Saptarshi ChatterjeeNessuna valutazione finora
- Gps Rtklib Seminor 1Documento94 pagineGps Rtklib Seminor 1razikaNessuna valutazione finora
- ZSOFDocumento21 pagineZSOFjoker hotNessuna valutazione finora
- GPS 1Documento5 pagineGPS 1Arnold Alexander GarzonNessuna valutazione finora
- Satellite Navigation and PositioningDocumento29 pagineSatellite Navigation and PositioningShalom 007Nessuna valutazione finora
- Vadodara, India Vabo/Bdq: .Eff.5.NovDocumento7 pagineVadodara, India Vabo/Bdq: .Eff.5.Novmehul da aviatorNessuna valutazione finora
- VHF Omnidirectional Range - VOR (Beacon)Documento5 pagineVHF Omnidirectional Range - VOR (Beacon)pilot digitalNessuna valutazione finora
- Fs Navigator ManualDocumento25 pagineFs Navigator ManualVladimir Ionescu100% (2)
- Models Impacted by GPS Rollover Cycles - With Serial Number (S/N) DETAILDocumento1 paginaModels Impacted by GPS Rollover Cycles - With Serial Number (S/N) DETAILRanjeet singhNessuna valutazione finora
- 10 L MlatDocumento29 pagine10 L MlatIsaiah Kofi TefutorNessuna valutazione finora
- East Midlands Ils:Dme:Ndb (L) Rwy 27Documento1 paginaEast Midlands Ils:Dme:Ndb (L) Rwy 27sandroNessuna valutazione finora
- RJTTDocumento103 pagineRJTTJerryNessuna valutazione finora
- AC 90-100A RC Compliance Matrix PDFDocumento14 pagineAC 90-100A RC Compliance Matrix PDFArun SasiNessuna valutazione finora
- GPSDocumento149 pagineGPSVivek Gill100% (2)
- SEQM PACK Ene2016 PDFDocumento44 pagineSEQM PACK Ene2016 PDFWashington Muñoz100% (1)
- Ibaq Baq: Barranquilla, Colombia Skbq/Baq Ilszrwy05Documento1 paginaIbaq Baq: Barranquilla, Colombia Skbq/Baq Ilszrwy05Alexandra DiazNessuna valutazione finora
- Epoch 35 SpecsheetDocumento1 paginaEpoch 35 SpecsheetChristos MyriounisNessuna valutazione finora
- Ilc Cuv: Cuenca, Ecuador Secu/Cue Ilsorloczrwy23Documento1 paginaIlc Cuv: Cuenca, Ecuador Secu/Cue Ilsorloczrwy23Roberto Briceño CorreaNessuna valutazione finora
- LBSF Ilsy 09Documento1 paginaLBSF Ilsy 09ItsIlaiNessuna valutazione finora
- Ifr Gps Regulations: Regulatory ReviewDocumento4 pagineIfr Gps Regulations: Regulatory ReviewMos DetNessuna valutazione finora
- (IAC) Ilswcati&Iirwy15: CURITIBA / Afonso Pena, INTL (SBCT) Chart Instrument ApproachDocumento1 pagina(IAC) Ilswcati&Iirwy15: CURITIBA / Afonso Pena, INTL (SBCT) Chart Instrument ApproachMichael NevesNessuna valutazione finora