Potrebbero piacerti anche
- 21 International Rate TariffDocumento3 pagine21 International Rate Tariffadiladil2001Nessuna valutazione finora
- International Express & Parcel Delivery Rates (US$) : Weight (In KG) Zone 1 Zone 2 Zone 3 Zone 4 Zone 5 Zone 6 Zone 7Documento3 pagineInternational Express & Parcel Delivery Rates (US$) : Weight (In KG) Zone 1 Zone 2 Zone 3 Zone 4 Zone 5 Zone 6 Zone 7MUHAMMAD ALI RAZANessuna valutazione finora
- View Free ArticleDocumento5 pagineView Free Articleadiladil2001Nessuna valutazione finora
- NRPU Old PolicyDocumento18 pagineNRPU Old PolicyMuhammad Umer FarooqNessuna valutazione finora
- List of HEC Recognized Science JournalsDocumento16 pagineList of HEC Recognized Science JournalsM Uqaab MadniNessuna valutazione finora
- Energy Audit RequirementsDocumento7 pagineEnergy Audit Requirementsadiladil2001Nessuna valutazione finora
- Hong Kong Parking Demand StudyDocumento7 pagineHong Kong Parking Demand Studyadiladil2001Nessuna valutazione finora
- Criteria For The Selection of Students For The National Ict Internship ProgramDocumento3 pagineCriteria For The Selection of Students For The National Ict Internship Programadiladil2001Nessuna valutazione finora
- ANSYS TutorialDocumento44 pagineANSYS Tutorialsauravc88Nessuna valutazione finora
- Opencv Tutorial: Lecturer: Amir Hossein KhaliliDocumento32 pagineOpencv Tutorial: Lecturer: Amir Hossein Khaliliadiladil2001Nessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- 2014 SMC SolutionsDocumento25 pagine2014 SMC Solutionskingkumar5Nessuna valutazione finora
- Math LabDocumento25 pagineMath LabnandinigourahaNessuna valutazione finora
- MATH3QDocumento38 pagineMATH3QRZ ZamoraNessuna valutazione finora
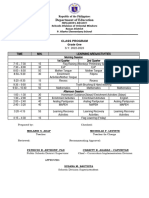
- Ces Narrative ReportDocumento1 paginaCes Narrative ReportRefinnej Bayutas SerolfNessuna valutazione finora
- Math10q2week6 Edited Theorem 1 3 Jan. 9 102024Documento16 pagineMath10q2week6 Edited Theorem 1 3 Jan. 9 102024Lacsina QwyncyNessuna valutazione finora
- CEO: Bank To Be Part of Solution': Final HurdleDocumento16 pagineCEO: Bank To Be Part of Solution': Final HurdleelauwitNessuna valutazione finora
- A Presentation Created by Teachers UnleashedDocumento69 pagineA Presentation Created by Teachers UnleashedCzarina GuillermoNessuna valutazione finora
- Pre-Calculus (Second Quarter)Documento2 paginePre-Calculus (Second Quarter)Christine MananghayaNessuna valutazione finora
- Angles NotesDocumento9 pagineAngles NotesdoommanNessuna valutazione finora
- G10 - Portfolio Assessment 1 - 2022-2023Documento2 pagineG10 - Portfolio Assessment 1 - 2022-2023ayush rajeshNessuna valutazione finora
- HW Chapter 10Documento24 pagineHW Chapter 10crampingpaulNessuna valutazione finora
- SSA Alameda Salary ChartsDocumento7 pagineSSA Alameda Salary ChartsMichelleNessuna valutazione finora
- M408L Exam 2Documento9 pagineM408L Exam 2Nathan ThaiNessuna valutazione finora
- Families of CirclesDocumento10 pagineFamilies of CirclesClarissa GomezNessuna valutazione finora
- Study Guide Geometry Quarter 3 Test 12-13Documento10 pagineStudy Guide Geometry Quarter 3 Test 12-13Sarra GrandeNessuna valutazione finora
- Math Category 6 Mock TestDocumento6 pagineMath Category 6 Mock TestSamrongNessuna valutazione finora
- Int-Ext Angle SOL QuestionsDocumento4 pagineInt-Ext Angle SOL Questionsfruity pebblesNessuna valutazione finora
- Basic School MathematicsDocumento638 pagineBasic School Mathematicsskmrrl75% (4)
- Worksheet Recount Kelas 8Documento1 paginaWorksheet Recount Kelas 8aaNessuna valutazione finora
- Letter Head Bayog ESDocumento2 pagineLetter Head Bayog ESReymart Tandang AdaNessuna valutazione finora
- PMWC ProblemsDocumento6 paginePMWC ProblemsDaniel Boenfie100% (1)
- Grade 8 Mathematics-Geometry MCQsDocumento13 pagineGrade 8 Mathematics-Geometry MCQsJayalaksmiAnandNessuna valutazione finora
- Grade 1Documento2 pagineGrade 1P Olarte ESNessuna valutazione finora
- pastpapersMathematics20-20International20 (0607) 202520Specimen20Paper20&20Syllabus0607 Y25 SPDocumento16 paginepastpapersMathematics20-20International20 (0607) 202520Specimen20Paper20&20Syllabus0607 Y25 SPdevam.zalawadia27Nessuna valutazione finora
- 1621339707-Mensuration 3 pdf1111111111111111111Documento10 pagine1621339707-Mensuration 3 pdf1111111111111111111SudhanshuNessuna valutazione finora
- PASCAL'S TRIANGLE MOD 7&8 FinalDocumento4 paginePASCAL'S TRIANGLE MOD 7&8 FinalIvan Chris BattadNessuna valutazione finora
- Prof EdDocumento10 pagineProf EdLauriel Adriatico BalucanNessuna valutazione finora
- Area and PerimeterDocumento26 pagineArea and Perimeterdheer nasitNessuna valutazione finora
- Jessica Brischen-MetzDocumento2 pagineJessica Brischen-Metzapi-274109706Nessuna valutazione finora