Potrebbero piacerti anche
- Cad Cam - 22.12.15-1Documento87 pagineCad Cam - 22.12.15-1RajueswarNessuna valutazione finora
- Important Questions For Nov Dec 2016 ME6008 Welding TechnologyDocumento1 paginaImportant Questions For Nov Dec 2016 ME6008 Welding TechnologyRajueswarNessuna valutazione finora
- EM QuestionsDocumento2 pagineEM QuestionsRajueswar100% (1)
- Gnanamani College of TechnologyDocumento15 pagineGnanamani College of TechnologyRajueswarNessuna valutazione finora
- BE MECH VI SEM - CAD CAM Manual - Reg 2013Documento50 pagineBE MECH VI SEM - CAD CAM Manual - Reg 2013RajueswarNessuna valutazione finora
- ICE Lecture NotesDocumento12 pagineICE Lecture NotesRajueswar100% (1)
- Me6611 - Cadcam Manual - RecordDocumento82 pagineMe6611 - Cadcam Manual - RecordRajueswarNessuna valutazione finora
- Lecture #02: Moments, Couples, and Force Couple SystemsDocumento71 pagineLecture #02: Moments, Couples, and Force Couple SystemsRajueswarNessuna valutazione finora
- Em QuestionsDocumento16 pagineEm QuestionsRajueswarNessuna valutazione finora
- UNIT 1 Engg EconomicsDocumento2 pagineUNIT 1 Engg EconomicsRajueswarNessuna valutazione finora
- BM8251Documento3 pagineBM8251RajueswarNessuna valutazione finora
- Fluid PropertiesDocumento16 pagineFluid PropertiesRajueswarNessuna valutazione finora
- BE MECH VI SEM - CAD CAM Manual - Reg 2013Documento50 pagineBE MECH VI SEM - CAD CAM Manual - Reg 2013RajueswarNessuna valutazione finora
- MG6863 EE Unit 2 Notes PDFDocumento13 pagineMG6863 EE Unit 2 Notes PDFRajueswarNessuna valutazione finora
- AICE Questions Unit-IDocumento1 paginaAICE Questions Unit-IRajueswarNessuna valutazione finora
- MG6863 EE Unit 5 Notes PDFDocumento17 pagineMG6863 EE Unit 5 Notes PDFRajueswarNessuna valutazione finora
- CIM IntroductionDocumento13 pagineCIM IntroductionVikram KedambadiNessuna valutazione finora
- Classification of Production Systems: Assistant Professor Dr. Mahmoud Abbas MahmoudDocumento5 pagineClassification of Production Systems: Assistant Professor Dr. Mahmoud Abbas MahmoudmcpackmanNessuna valutazione finora
- Presentation 1Documento14 paginePresentation 1RajueswarNessuna valutazione finora
- MG6863 EE Unit 1 Notes PDFDocumento21 pagineMG6863 EE Unit 1 Notes PDFRajueswarNessuna valutazione finora
- Computer: Manufacturing SystemsDocumento39 pagineComputer: Manufacturing SystemsRajueswarNessuna valutazione finora
- Computer GraphicsDocumento16 pagineComputer GraphicsRajueswarNessuna valutazione finora
- Hydraulics & Fluid Mechanics - Modi-SethDocumento528 pagineHydraulics & Fluid Mechanics - Modi-SethRajueswar75% (4)
- CIM Lecture Notes 1Documento16 pagineCIM Lecture Notes 1Kannan Sreenivasan100% (1)
- Cad DrawingDocumento11 pagineCad DrawingRajueswarNessuna valutazione finora
- Cad DrawingDocumento11 pagineCad DrawingRajueswarNessuna valutazione finora
- Sl. No Date Name of The Experiment Page No. Marks Awarded SignatureDocumento1 paginaSl. No Date Name of The Experiment Page No. Marks Awarded SignatureRajueswarNessuna valutazione finora
- Electric Discharge MachiningDocumento51 pagineElectric Discharge MachiningRajueswarNessuna valutazione finora
- Title Block: Name: Roll No: Class: Plate No: Date: Title:Projection of Solids Scale 1:1 All Dim - Are in MMDocumento6 pagineTitle Block: Name: Roll No: Class: Plate No: Date: Title:Projection of Solids Scale 1:1 All Dim - Are in MMRajueswarNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Chapter 4Documento28 pagineChapter 4sulavdklNessuna valutazione finora
- BI2002B - Circuitos LógicosDocumento30 pagineBI2002B - Circuitos LógicosHéctor Vega SantamaríaNessuna valutazione finora
- MCQS Module 2 RGPV Mathematics IiiDocumento8 pagineMCQS Module 2 RGPV Mathematics IiiMohit BhalekarNessuna valutazione finora
- Fortran Numerical Analysis ProgramsDocumento56 pagineFortran Numerical Analysis ProgramsOmed Ghareb97% (29)
- 6.transportation ProblemsDocumento66 pagine6.transportation ProblemsAparna SinghNessuna valutazione finora
- Cbjemacq 02Documento13 pagineCbjemacq 02Raman Deep DarochNessuna valutazione finora
- LINEAR PROGRAMMING - Lesson 2 PDFDocumento39 pagineLINEAR PROGRAMMING - Lesson 2 PDFCristel ObraNessuna valutazione finora
- CH 10 1 (M)Documento8 pagineCH 10 1 (M)aishaNessuna valutazione finora
- AE-603A: Introduction To Scientific Computing Fall 2017Documento2 pagineAE-603A: Introduction To Scientific Computing Fall 2017Mainak HoreNessuna valutazione finora
- Optimisation and Its ApplicationsDocumento47 pagineOptimisation and Its ApplicationssunsrinNessuna valutazione finora
- HW2 SolutionDocumento7 pagineHW2 SolutionDevaraj SubrmanayamNessuna valutazione finora
- CH 2 Iterative Methods PDFDocumento65 pagineCH 2 Iterative Methods PDFAshok SapkotaNessuna valutazione finora
- HelmertDocumento3 pagineHelmertNadiaNessuna valutazione finora
- 2 - LOGIC GATES - Revision Worksheet MS - CoachingDocumento22 pagine2 - LOGIC GATES - Revision Worksheet MS - CoachingAfaf ShahidNessuna valutazione finora
- Iemh 102Documento18 pagineIemh 102Ayushmaan SinghNessuna valutazione finora
- Bdc5101 Assignment 1 - Ho SijieDocumento5 pagineBdc5101 Assignment 1 - Ho SijieKaizen188Nessuna valutazione finora
- Formula Sheet Final ExamDocumento8 pagineFormula Sheet Final ExamAli AmranNessuna valutazione finora
- Assignment 6.3: Z 1, Z 3, Z 3 y (X) X + XDocumento13 pagineAssignment 6.3: Z 1, Z 3, Z 3 y (X) X + XAyush BhadauriaNessuna valutazione finora
- Program 1: Te A Program To Implement BisecDocumento24 pagineProgram 1: Te A Program To Implement BisecAnshumanSrivastavNessuna valutazione finora
- Ouyed Chapter 6 Numerical Integration PDFDocumento18 pagineOuyed Chapter 6 Numerical Integration PDFRaghavNessuna valutazione finora
- Transportation and Assignment ProblemDocumento67 pagineTransportation and Assignment ProblemRovick TarifeNessuna valutazione finora
- Introduction To Digital Logic Families PDFDocumento15 pagineIntroduction To Digital Logic Families PDFgutterbcNessuna valutazione finora
- Experiment 2a2q2020Documento25 pagineExperiment 2a2q2020Frenchesca Darlene CaliwliwNessuna valutazione finora
- MTH 3107: Linear Programming: J. KizitoDocumento24 pagineMTH 3107: Linear Programming: J. KizitoSsemakula UhuruNessuna valutazione finora
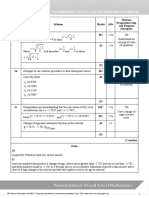
- Mark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Documento7 pagineMark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Arthur LongwardNessuna valutazione finora
- G.D. Goenka Public School, Sector 22, Rohini Class - Ix Practice Sheet-2 Subjective PolynomialsDocumento2 pagineG.D. Goenka Public School, Sector 22, Rohini Class - Ix Practice Sheet-2 Subjective Polynomialsvikas aggarwalNessuna valutazione finora
- Previous Year Boards Questions: Chapter 2 - PolynomialsDocumento2 paginePrevious Year Boards Questions: Chapter 2 - PolynomialsASgroup NasirabadNessuna valutazione finora
- CHAPTER 3 LPP Graphical AnalysisDocumento25 pagineCHAPTER 3 LPP Graphical AnalysisAgatNessuna valutazione finora
- Newton-Raphson Method: Numerical AnalysisDocumento14 pagineNewton-Raphson Method: Numerical Analysisنورالهدى سعيد عبدNessuna valutazione finora