Potrebbero piacerti anche
- Variable Speed AC Drives with Inverter Output FiltersDa EverandVariable Speed AC Drives with Inverter Output FiltersNessuna valutazione finora
- Control in Power Electronics and Electrical Drives: Proceedings of the Second IFAC Symposium, Düsseldorf, Federal Republic of Germany, 3 – 5 October 1977Da EverandControl in Power Electronics and Electrical Drives: Proceedings of the Second IFAC Symposium, Düsseldorf, Federal Republic of Germany, 3 – 5 October 1977W. LeonhardNessuna valutazione finora
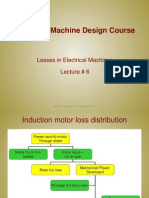
- Lecture6 - Losses in Electric MachinesDocumento24 pagineLecture6 - Losses in Electric Machinesthulasi_krishnaNessuna valutazione finora
- James Hendershot, IEEE Life Fellow Electric Motor Design & Manufacturing ExpertDocumento8 pagineJames Hendershot, IEEE Life Fellow Electric Motor Design & Manufacturing ExpertsHORT SHORTNessuna valutazione finora
- Lecture1 - History & IntroductionDocumento20 pagineLecture1 - History & Introductionramaswamykama786100% (1)
- Ansoft RMxprt DC Motor AnalysisDocumento32 pagineAnsoft RMxprt DC Motor AnalysisVladimir Kuznetsov100% (1)
- Synchronous Machine DesignDocumento35 pagineSynchronous Machine DesignvietnhuNessuna valutazione finora
- Design of Synchronous MachinesDocumento17 pagineDesign of Synchronous MachinesNiteshNarukaNessuna valutazione finora
- Examples of Stator Winding Partial Dishcarge Due To Inverter DrivesDocumento4 pagineExamples of Stator Winding Partial Dishcarge Due To Inverter DrivesyogaNessuna valutazione finora
- Problems in the Design and Development of 750 MW Turbogenerators: International Series of Monographs on Electronics and InstrumentationDa EverandProblems in the Design and Development of 750 MW Turbogenerators: International Series of Monographs on Electronics and InstrumentationNessuna valutazione finora
- Electric Motor Design Using Ansys MaxwellDocumento23 pagineElectric Motor Design Using Ansys MaxwellAJAY NNessuna valutazione finora
- End Winding Vibration Hydro GeneratorDocumento5 pagineEnd Winding Vibration Hydro Generatorpatel chandramaniNessuna valutazione finora
- Electrical SteelDocumento193 pagineElectrical SteelpavanupadhyeNessuna valutazione finora
- Unit2 MachinesDocumento35 pagineUnit2 MachinesdineshkumarNessuna valutazione finora
- DCMotors DesignGuideDocumento12 pagineDCMotors DesignGuidenaruto256Nessuna valutazione finora
- Machine Training PM Synchronous Ansoft MaxwellDocumento111 pagineMachine Training PM Synchronous Ansoft Maxwellmashinbaz1100% (3)
- Lecture27 - PM-DC Brushless and PM-AC Synchronous Machines PDFDocumento18 pagineLecture27 - PM-DC Brushless and PM-AC Synchronous Machines PDFSalih InceNessuna valutazione finora
- AC Machine Stator Phases and Induction Motor Rotating Magnetic FieldDocumento39 pagineAC Machine Stator Phases and Induction Motor Rotating Magnetic FieldSaneer M SaliNessuna valutazione finora
- General Engineering Science in SI Units: In Two VolumesDa EverandGeneral Engineering Science in SI Units: In Two VolumesNessuna valutazione finora
- Lecture12 - Stator Laminations & Core Design StudiesDocumento22 pagineLecture12 - Stator Laminations & Core Design Studiesramaswamykama786100% (1)
- Unit 3 SRMDocumento66 pagineUnit 3 SRMDr SriNessuna valutazione finora
- Lecture11 - Stator Configuration Design CriteriaDocumento18 pagineLecture11 - Stator Configuration Design Criteriaramaswamykama786Nessuna valutazione finora
- Reluctance MotorDocumento16 pagineReluctance Motorapi-382713280% (5)
- 2011 PhDCourse SpecialElectricalMachines PDFDocumento151 pagine2011 PhDCourse SpecialElectricalMachines PDFnagu100% (1)
- Lecture13 - Stator Insulation System vs. Voltage & TemperatureDocumento21 pagineLecture13 - Stator Insulation System vs. Voltage & Temperatureramaswamykama786Nessuna valutazione finora
- Switched Reluctance Motor (SRM)Documento8 pagineSwitched Reluctance Motor (SRM)Ömer Faruk AbdullahNessuna valutazione finora
- Synchronous Reluctance Motor PDFDocumento17 pagineSynchronous Reluctance Motor PDFVamsi Kattamuri100% (4)
- Lecture14 - Stator Phase Circuits & Coil Design, Part 1Documento21 pagineLecture14 - Stator Phase Circuits & Coil Design, Part 1ramaswamykama786Nessuna valutazione finora
- Motor WindingsDocumento12 pagineMotor WindingsAbiodun IloriNessuna valutazione finora
- Motor Sizing WorksheetDocumento5 pagineMotor Sizing Worksheetapi-3835934Nessuna valutazione finora
- Electrical Machine Design Project for 440kW GeneratorDocumento8 pagineElectrical Machine Design Project for 440kW GeneratorArvin TorrenteNessuna valutazione finora
- Synchronous MachineDocumento33 pagineSynchronous Machinecrisis_z100% (1)
- Improved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)Da EverandImproved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)Nessuna valutazione finora
- Antologc3ada Poc3a9tica 27 TextoDocumento100 pagineAntologc3ada Poc3a9tica 27 TextoLukaz JuarezNessuna valutazione finora
- Embedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityDa EverandEmbedded Mechatronic Systems, Volume 1: Analysis of Failures, Predictive ReliabilityNessuna valutazione finora
- Modeling and Analysis of Doubly Fed Induction Generator Wind Energy SystemsDa EverandModeling and Analysis of Doubly Fed Induction Generator Wind Energy SystemsNessuna valutazione finora
- Induction MotorsDocumento25 pagineInduction Motorsapi-3827132100% (2)
- DC Motor Parameter EstimationDocumento10 pagineDC Motor Parameter EstimationElmer HCNessuna valutazione finora
- Ansoft Maxwell2D - V12Documento334 pagineAnsoft Maxwell2D - V12apujanag100% (1)
- Electrical Machine: Understanding How Rotating Magnetic Fields WorkDocumento50 pagineElectrical Machine: Understanding How Rotating Magnetic Fields WorkTanvi SuryawanshiNessuna valutazione finora
- UNDERSTANDING SHAFT VOLTAGE AND GROUNDING CURRENTS OF TURBINE GENERATORSDocumento12 pagineUNDERSTANDING SHAFT VOLTAGE AND GROUNDING CURRENTS OF TURBINE GENERATORSArni 2020Nessuna valutazione finora
- 8MS Three-Phase Synchronous MotorsDocumento163 pagine8MS Three-Phase Synchronous MotorsrrrNessuna valutazione finora
- Motor Design Suite V12Documento60 pagineMotor Design Suite V12Trần Trung HiếuNessuna valutazione finora
- PMSM Control (FOC & DTC) for WECS & DrivesDocumento57 paginePMSM Control (FOC & DTC) for WECS & Drivesleonardo_arévalo_28Nessuna valutazione finora
- Current Signature AnalysisDocumento2 pagineCurrent Signature AnalysisawanrmbNessuna valutazione finora
- Design and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainDocumento7 pagineDesign and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainMC ANessuna valutazione finora
- Wound Rotor Motor TestingDocumento5 pagineWound Rotor Motor Testingbige1911Nessuna valutazione finora
- A New Analytical Method On The Field Calculation of IPMDocumento9 pagineA New Analytical Method On The Field Calculation of IPMYusuf YaşaNessuna valutazione finora
- DC Motor PrimerDocumento26 pagineDC Motor PrimerastroltravlerNessuna valutazione finora
- Torque Control in Field Weakening ModeDocumento84 pagineTorque Control in Field Weakening Mode1541Nessuna valutazione finora
- Motor Design PDFDocumento99 pagineMotor Design PDFakhilnandanNessuna valutazione finora
- Low-Voltage PMDC Motors 338 WattsDocumento20 pagineLow-Voltage PMDC Motors 338 WattscharlierockerNessuna valutazione finora
- Analysis of Permanent Magnet Synchronous MotorDocumento15 pagineAnalysis of Permanent Magnet Synchronous Motormalini72Nessuna valutazione finora
- Multilevel InverterDocumento74 pagineMultilevel InverterRaghu Selvaraj100% (4)
- ID 610C Carver Intro To Motor ControlDocumento46 pagineID 610C Carver Intro To Motor Control조용규Nessuna valutazione finora
- Lecture2 - Basic Electric Motor & Generator TheoryDocumento21 pagineLecture2 - Basic Electric Motor & Generator Theorythulasi_krishnaNessuna valutazione finora
- Sinko: Love Our EarthDocumento13 pagineSinko: Love Our Earthmanchau717Nessuna valutazione finora
- Reluctance Synchronous Motors HendershotDocumento31 pagineReluctance Synchronous Motors HendershotLatisha CarterNessuna valutazione finora
- BLDC MotorDocumento55 pagineBLDC MotorDr. Syed Abdul Rahman Kashif100% (1)
- Modelica Thermal ModelingDocumento4 pagineModelica Thermal Modelingthulasi_krishnaNessuna valutazione finora
- Feedback Control Performance MeasuresDocumento37 pagineFeedback Control Performance MeasuresmrkmatNessuna valutazione finora
- Simulation CellierDocumento65 pagineSimulation Cellierthulasi_krishnaNessuna valutazione finora
- CarboTherm TB2 0213 R02Documento2 pagineCarboTherm TB2 0213 R02thulasi_krishnaNessuna valutazione finora
- Expense Tracker: Date Purpose Payment Method Transaction # Payee Expense Category Notes Amount Total ExpensesDocumento9 pagineExpense Tracker: Date Purpose Payment Method Transaction # Payee Expense Category Notes Amount Total Expensesthulasi_krishnaNessuna valutazione finora
- Mil DTL 38999 Series IIIDocumento10 pagineMil DTL 38999 Series IIIthulasi_krishnaNessuna valutazione finora
- Economic and Product Design Considerations in Machiningchapter 24Documento38 pagineEconomic and Product Design Considerations in Machiningchapter 24احمد عمر حديدNessuna valutazione finora
- Model Based Systems Engineering For Aircraft Systems - How DoesDocumento9 pagineModel Based Systems Engineering For Aircraft Systems - How DoesAlmas QasimNessuna valutazione finora
- Valve Sizing CalculationsDocumento20 pagineValve Sizing Calculationsask_friend100% (3)
- Chinese Baby Gender Chart - Lunar Month of ConceptionDocumento6 pagineChinese Baby Gender Chart - Lunar Month of Conceptionthulasi_krishnaNessuna valutazione finora
- Seal Design Considerations Using Kalrez PartsDocumento4 pagineSeal Design Considerations Using Kalrez Partsthulasi_krishnaNessuna valutazione finora
- Lecture2 - Basic Electric Motor & Generator TheoryDocumento21 pagineLecture2 - Basic Electric Motor & Generator Theorythulasi_krishnaNessuna valutazione finora
- Project Status Dashboard Xl2007Documento22 pagineProject Status Dashboard Xl2007Jkjiwani AccaNessuna valutazione finora
- FastenersDocumento178 pagineFastenersthulasi_krishna100% (6)
- Seals and Gaskets: 3.0 Table of ContentsDocumento40 pagineSeals and Gaskets: 3.0 Table of Contentsthulasi_krishnaNessuna valutazione finora
- F 4Documento9 pagineF 4thulasi_krishnaNessuna valutazione finora
- Gearmotor size estimator spreadsheetDocumento2 pagineGearmotor size estimator spreadsheetS C GaurNessuna valutazione finora
- Electromagnetic Design of DC MotorsDocumento24 pagineElectromagnetic Design of DC Motorsthulasi_krishna100% (1)
- Technical Manual - O-Ring Gland Design InformationDocumento31 pagineTechnical Manual - O-Ring Gland Design InformationplaunieNessuna valutazione finora
- Bolt DesignDocumento18 pagineBolt Designthulasi_krishnaNessuna valutazione finora
- Brushless DC Motor Phase Poles Lot ConfigurationsDocumento17 pagineBrushless DC Motor Phase Poles Lot Configurationsthulasi_krishnaNessuna valutazione finora
- LaminateDocumento3 pagineLaminatethulasi_krishnaNessuna valutazione finora
- Projectto Dolist1Documento2 pagineProjectto Dolist1Vikas PhatakNessuna valutazione finora
- Random Vibration - An Overview - BarryControlsDocumento15 pagineRandom Vibration - An Overview - BarryControlsGuru75Nessuna valutazione finora
- Lecture2 - Basic Electric Motor & Generator TheoryDocumento21 pagineLecture2 - Basic Electric Motor & Generator Theorythulasi_krishnaNessuna valutazione finora
- Calendar 2014: January February MarchDocumento4 pagineCalendar 2014: January February Marchthulasi_krishnaNessuna valutazione finora
- Public Swimming PoolDocumento8 paginePublic Swimming PoolKetkee MalveNessuna valutazione finora
- Emergency Restoration SystemDocumento15 pagineEmergency Restoration SystemmhergonzalesNessuna valutazione finora
- Sap Ehp 7 For Sap Erp 6Documento9 pagineSap Ehp 7 For Sap Erp 6fiestamixNessuna valutazione finora
- Good Manual Xilinx-Fpga Fpga TimingDocumento168 pagineGood Manual Xilinx-Fpga Fpga TimingChauHuynhNessuna valutazione finora
- NTUST DCE Graduate Program ApplicationDocumento1 paginaNTUST DCE Graduate Program ApplicationDewi Hindra WijayaNessuna valutazione finora
- Purlins Cold Formed SectionDocumento5 paginePurlins Cold Formed SectionHarjasa AdhiNessuna valutazione finora
- ICT - PPTX (Repaired)Documento290 pagineICT - PPTX (Repaired)Samuel Benson Sesay100% (1)
- Extreme Boats - Outerlimits 50' BoatDocumento3 pagineExtreme Boats - Outerlimits 50' BoatExtreme Boats100% (5)
- 160 88-CL2Documento6 pagine160 88-CL2vanthe140591Nessuna valutazione finora
- Limbach l2000 All Operatingandmaintenancemanual enDocumento46 pagineLimbach l2000 All Operatingandmaintenancemanual enFernando MoreiraNessuna valutazione finora
- Kingstar Lighting InductionDocumento8 pagineKingstar Lighting Inductionapi-194673166Nessuna valutazione finora
- HTML Facebook CokDocumento3 pagineHTML Facebook CokAldi SoNNessuna valutazione finora
- Matrix AdvantagesDocumento14 pagineMatrix AdvantagesAdeline WinsterNessuna valutazione finora
- SAP QM: Quality Management Module OverviewDocumento34 pagineSAP QM: Quality Management Module OverviewAna Luque100% (1)
- Tumble Dryer Instruction BookletDocumento72 pagineTumble Dryer Instruction BookletElla MariaNessuna valutazione finora
- Screw ConveyorDocumento3 pagineScrew ConveyorWalter EsquivelNessuna valutazione finora
- PMT Hps 34 VF 03 23 Mag3000 SpecificationsDocumento17 paginePMT Hps 34 VF 03 23 Mag3000 Specificationswika mepNessuna valutazione finora
- Physics I Projectile Motion Practice Problems 4 1 SolnDocumento16 paginePhysics I Projectile Motion Practice Problems 4 1 SolnFranceNessuna valutazione finora
- SOW - Provision of Completion Fluids Chemical SupplyDocumento5 pagineSOW - Provision of Completion Fluids Chemical SupplyAlok SinghNessuna valutazione finora
- Cognos DispatcherDocumento17 pagineCognos Dispatcherabdul87sNessuna valutazione finora
- Ohio EPA Sends Violation To Norwood Safety Service Director Joe GeersDocumento5 pagineOhio EPA Sends Violation To Norwood Safety Service Director Joe GeersCincinnatiEnquirerNessuna valutazione finora
- SDN and OpenFlow For Beginners With Hands On LabsDocumento17 pagineSDN and OpenFlow For Beginners With Hands On LabstiwarigNessuna valutazione finora
- ISO and EN standards for securing cargo in vehicles and containersDocumento35 pagineISO and EN standards for securing cargo in vehicles and containersMuharrem BeyogluNessuna valutazione finora
- Brazo TB PDFDocumento67 pagineBrazo TB PDFRimbertNessuna valutazione finora
- Mechanical Engineering Department: Republic of The Philippines Bicol University College of Engineering Legazpi CityDocumento5 pagineMechanical Engineering Department: Republic of The Philippines Bicol University College of Engineering Legazpi CityJohn Carlo Balucio LlaveNessuna valutazione finora
- MODULE 3 - PSD (2 Files Merged)Documento14 pagineMODULE 3 - PSD (2 Files Merged)joshNessuna valutazione finora
- Typical Cable Laying Details For Direct Buried, Low Tension CablesDocumento6 pagineTypical Cable Laying Details For Direct Buried, Low Tension CablesAbdul Muneer PalapraNessuna valutazione finora
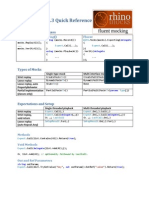
- Rhino MocksDocumento3 pagineRhino MocksVenkateswararao KonjetiNessuna valutazione finora
- Off Grid PV Systems Design GuidelinesDocumento24 pagineOff Grid PV Systems Design GuidelinestantibaNessuna valutazione finora
- (WRC-SouthAfrica-2001-R. McKenzei) PRESMAC User GuideDocumento80 pagine(WRC-SouthAfrica-2001-R. McKenzei) PRESMAC User GuideStephenson Xavier Molina ArceNessuna valutazione finora