Potrebbero piacerti anche
- MBA HRM PptsDocumento149 pagineMBA HRM PptsTamire santhosh mohan100% (1)
- Horlicks Marketing StrategyDocumento3 pagineHorlicks Marketing StrategyTamire santhosh mohanNessuna valutazione finora
- Aptech Code of ConductDocumento2 pagineAptech Code of ConductTamire santhosh mohanNessuna valutazione finora
- Fabulous Examples of Excel Functions - Advanced COUNTIF Function!Documento3 pagineFabulous Examples of Excel Functions - Advanced COUNTIF Function!Tamire santhosh mohanNessuna valutazione finora
- PolymorphismDocumento15 paginePolymorphismTamire santhosh mohanNessuna valutazione finora
- BIOTELEMETRYDocumento12 pagineBIOTELEMETRYTamire santhosh mohanNessuna valutazione finora
- NR 321003 Principles of Bio Medical InstrumentationDocumento4 pagineNR 321003 Principles of Bio Medical InstrumentationSrinivasa Rao G100% (3)
- Industrial Instrumentation 1Documento1 paginaIndustrial Instrumentation 1Tamire santhosh mohanNessuna valutazione finora
- 2007 Jawaharlal Nehru Technological University: Answer Any FIVE Questions All Questions Carry Equal MarksDocumento1 pagina2007 Jawaharlal Nehru Technological University: Answer Any FIVE Questions All Questions Carry Equal MarksTamire santhosh mohanNessuna valutazione finora
- EieDocumento87 pagineEieapi-3798998100% (1)
- RR221701-MANAGEMENT-SCIENCE May 2006Documento5 pagineRR221701-MANAGEMENT-SCIENCE May 2006Tamire santhosh mohanNessuna valutazione finora
- Microsoft Access 2007 TutorialDocumento113 pagineMicrosoft Access 2007 TutorialTamire santhosh mohan100% (2)
- 2005 Jawaharlal Nehru Technological University: Answer Any FIVE Questions All Questions Carry Equal MarksDocumento1 pagina2005 Jawaharlal Nehru Technological University: Answer Any FIVE Questions All Questions Carry Equal MarksTamire santhosh mohanNessuna valutazione finora
- RR320301-MANAGEMENT-SCIENCE Sep 2007Documento5 pagineRR320301-MANAGEMENT-SCIENCE Sep 2007Tamire santhosh mohanNessuna valutazione finora
- Rr311004 Process Control InstrumentationDocumento8 pagineRr311004 Process Control InstrumentationSrinivasa Rao GNessuna valutazione finora
- RR320301-MANAGEMENT-SCIENCE May2007Documento4 pagineRR320301-MANAGEMENT-SCIENCE May2007Tamire santhosh mohanNessuna valutazione finora
- RR320301-MANAGEMENT-SCIENCE Sep 2006Documento6 pagineRR320301-MANAGEMENT-SCIENCE Sep 2006Tamire santhosh mohanNessuna valutazione finora
- R05320203-MANAGEMENT-SCIENCE May2008Documento5 pagineR05320203-MANAGEMENT-SCIENCE May2008Tamire santhosh mohanNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- OM Vibrator HVR 45 - 11289Documento52 pagineOM Vibrator HVR 45 - 11289Rajan Mullappilly100% (2)
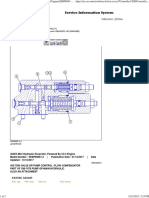
- Product: Mini Hyd Excavator Model: 304E2 MINI HYD EXCAVATOR ME402271 Configuration: 304E2 Mini Hydraulic Excavator ME400001-UP (MACHINE) POWERED BY C2.4 EngineDocumento2 pagineProduct: Mini Hyd Excavator Model: 304E2 MINI HYD EXCAVATOR ME402271 Configuration: 304E2 Mini Hydraulic Excavator ME400001-UP (MACHINE) POWERED BY C2.4 Engineevan100% (1)
- MR Developers Plumbing - ITIDocumento31 pagineMR Developers Plumbing - ITIUmamaheshwarrao Varma100% (1)
- MKS-112-TS-AZ7-RPT-03 - A - Design Report For Internal Corrosion Monitoring SystemDocumento16 pagineMKS-112-TS-AZ7-RPT-03 - A - Design Report For Internal Corrosion Monitoring SystemĐiệnBiênNhâm100% (1)
- 1components For Smoke and Heat Control Systems Functional Recommendations and Calculation Methods For Smoke and Heat Exhaust PDFDocumento42 pagine1components For Smoke and Heat Control Systems Functional Recommendations and Calculation Methods For Smoke and Heat Exhaust PDFAnonymous ixIhrPM2Nessuna valutazione finora
- Standard Const. Labor Works OutputDocumento2 pagineStandard Const. Labor Works OutputAnton_Young_1962Nessuna valutazione finora
- C4.4 86ekw 50Hz Spec Sheet HEXDocumento4 pagineC4.4 86ekw 50Hz Spec Sheet HEXCésar PérezNessuna valutazione finora
- EPS Data SheetDocumento2 pagineEPS Data SheetajoilhamNessuna valutazione finora
- Milling Ford Catalogue 58Documento6 pagineMilling Ford Catalogue 58Pedro Antonio Mejia SuarezNessuna valutazione finora
- Ford Kuga 2011 Wiring Diagram PDFDocumento655 pagineFord Kuga 2011 Wiring Diagram PDFCentury_1962100% (4)
- MSC Applied Electronics SyllabusDocumento1 paginaMSC Applied Electronics SyllabusKUMARNessuna valutazione finora
- Eclipse Single-Ended Ceramic Radiant Tube Burners: Model SER 450Documento6 pagineEclipse Single-Ended Ceramic Radiant Tube Burners: Model SER 450Thaiminh VoNessuna valutazione finora
- Ruskin Fire DamperDocumento4 pagineRuskin Fire DamperRAGANNessuna valutazione finora
- ModiconPremium ScraperChain PDFDocumento6 pagineModiconPremium ScraperChain PDFalvaroNessuna valutazione finora
- ContemporaryDocumento2 pagineContemporaryWALONessuna valutazione finora
- Repositioning ProjectDocumento32 pagineRepositioning Projectapi-384524431100% (3)
- Bearing of BridgesDocumento39 pagineBearing of BridgesAbhishek100% (1)
- Kelani Cable - ArmouredDocumento1 paginaKelani Cable - Armouredsukiraj Rasalingam50% (2)
- Weld Cheat SheetDocumento1 paginaWeld Cheat SheetBruce BrownNessuna valutazione finora
- All Tyeps Risk Assessment in Construction PDFDocumento112 pagineAll Tyeps Risk Assessment in Construction PDFSorin Tec100% (1)
- Honda K20 DiagnosticoDocumento11 pagineHonda K20 DiagnosticoSalvador Ramirez PachecoNessuna valutazione finora
- ALIYU, Muhammad Aminu: AddressDocumento2 pagineALIYU, Muhammad Aminu: AddressAliyu AbdulqadirNessuna valutazione finora
- Sprocket Application List-D.id. ChainDocumento0 pagineSprocket Application List-D.id. ChainΗλίας ΓεωργιάδηςNessuna valutazione finora
- Kut Epoxy Coating Uw 664Documento2 pagineKut Epoxy Coating Uw 664Führer Magdi BadranNessuna valutazione finora
- W5j9je 10 C 0042Documento250 pagineW5j9je 10 C 0042Najiullah MuzamilNessuna valutazione finora
- TFH220AEn112 PDFDocumento4 pagineTFH220AEn112 PDFJoseph BoshehNessuna valutazione finora
- Costing Sheet For Fabrication & Paint Calculator: Grand TotalDocumento1 paginaCosting Sheet For Fabrication & Paint Calculator: Grand Totalranvijaysingh2002Nessuna valutazione finora
- TOPIC 10 Foundation PDFDocumento24 pagineTOPIC 10 Foundation PDFnasyahrahNessuna valutazione finora
- Cursive Handwriting Practice Grids PDFDocumento55 pagineCursive Handwriting Practice Grids PDFMadzGabiolaNessuna valutazione finora
- Is 4948 2002 PDFDocumento11 pagineIs 4948 2002 PDFTousif ShaikhNessuna valutazione finora