Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Volumenes Finitos
Caricato da
Miguel Ángel Martínez DelgadoTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Volumenes Finitos
Caricato da
Miguel Ángel Martínez DelgadoCopyright:
Formati disponibili
C.
Rosales
IPM-468: Dinmica de Fluidos Computacional
1
Algunos Fundamentos del Mtodo
de Volmenes Finitos
1. Resumen de la Formulacin Bsica del Mtodo de Volmenes Finitos
Como se demostr, las ecuaciones de conservacin de un problema de CFD se
pueden expresar en la forma general
t
( ) +
x
i
( u
i
) =
|
|
\
|
i i
x x
) (
+ q (1)
donde es la variable dependiente, q el trmino fuente asociado a , y
()
corresponde
al coeficiente de difusin para .
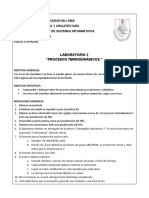
En la discretizacin espacial de la ecuacin (1) en volmenes finitos, el dominio
de solucin se divide en celdas contiguas (o volmenes de control), cada una rodeando
un nodo, en el cual se calcula el valor de la variable , como se muestra en la figura 1
(el nodo acta como posicin representante del valor de la variable en dicha celda)
Integrando la ecuacin diferencial (1) sobre cada uno de estos volmenes de control se
obtienen las ecuaciones que relacionan el valor de en cada nodo con los valores en los
nodos vecinos. En lo que sigue se presenta un desarrollo para una malla con volmenes
finitos sobre una malla Cartesiana (i.e., las celdas son paraleleppedos), con el objetivo
de simplificar la presentacin por razones didcticas. Se debe tener presente que este
mtodo no se restringe a mallas Cartesianas, y se puede aplicar en mallas curvilineas
estructuradas o no-estructuradas.
Figura 1 Discretizacin de un dominio de solucin en volmenes de control finitos.
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
2
Comparado con la discretizacin convencional de diferencias finitas mediante
series de Taylor, este procedimiento tiene la ventaja de asegurar la conservacin global
de la variable transportada. En la formulacin por series de Taylor o similares, las
derivadas en la ecuacin diferencial para un nodo especfico, son reemplazadas por sus
correspondientes formas en diferencias, resultando una ecuacin que satisface la ley de
conservacin en estos puntos discretos. Sin embargo, esto no garantiza que la
conservacin se mantenga en todo el dominio, debido a que no se exige la continuidad
del flujo de entre nodos adyacentes, y por consiguiente la suma de las ecuaciones de
diferencias sobre todos los nodos no necesariamente producir un balance de los flujos
de la propiedad entrando y saliendo del dominio de solucin. Tal balance se asegura
slo si el nmero de nodos es muy grande (rigurosamente, si el espaciado entre nodos
tiende a cero). La formulacin en volmenes finitos en cambio, fuerza a los flujos de la
propiedad a travs de las caras de cada celda a ser iguales vistos desde ambos lados,
por lo que el balance integral de la propiedad sobre cualquier grupo de celdas, y sobre
todo el dominio, queda garantizado incluso para una discretizacin gruesa, y no slo en
el lmite con un nmero muy grande de nodos.
La nomenclatura empleada se explica en la figuras 2 y 3, donde se representa un
volumen de control general, con su nodo asociado P, y sus vecinos E, W, N, S, T y B.
Las posiciones en las fronteras de la celda se denotan por las respectivas letras
minsculas. Cuando estos smbolos aparecen como subndice, indican que la cantidad
se evala en el nodo o frontera al que se hace referencia. Asimismo, para evitar
confusin, en las ecuaciones directamente referidas a la malla de discretizacin donde
aparezcan cantidades vectoriales, no se utilizar la convencin de suma sobre el ndice
repetido.
Como los volmenes finitos son las unidades bsicas de discretizacin, la malla
se construye generalmente definiendo las posiciones de las fronteras de los mismos.
Las posiciones de los nodos se deducen a continuacin de la discretizacin del dominio
de solucin ubicndolos en los centros de los volmenes de control. Por lo tanto,
cuando los tamaos de stos no son uniformes, las fronteras no quedan situadas en el
punto medio entre nodos adyacentes. Un procedimiento alternativo (ya poco usado) es
el de definir primero la malla de nodos y calcular luego las posiciones de las fronteras
de modo que se siten en el punto medio entre los nodos. Aunque eso simplifica
algunos clculos a efectuar para la interpolacin de propiedades en estas fronteras, se
requiere un deduccin particular para las ecuaciones discretizadas en los nodos de los
contornos del dominio de solucin, y adems resulta ms complicado el hacer coincidir
las fronteras de los volmenes de control con contornos fsicos del problema.
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
3
Figura 2 Volumen de control en torno al nodo P.
Figura 3 Vistas laterales del volumen de control.
Se definir F
i
como el flujo total de transporte de (conveccin + difusin):
F
i
= u
i
i
x
, (2)
por lo cual la ecuacin (1) se puede escribir como
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
4
t
( ) +
F
x
i
i
= q (3)
La ecuacin de discretizacin se deduce ahora integrando (2) en el espacio, sobre el
volumen de la celda, y en el tiempo, desde un instante t arbitrario hasta un instante
posterior t + t. Suponiendo que los valores de las variables en el nodo P prevalecen
sobre todo el volumen de control, la integracin del primer trmino en (2) resulta en
+
V
t t
t
t
( ) dt dV = (
P
P
P P
0 0
) V (4)
donde V es el volumen de la celda, y el superndice 0 designa cantidades evaluadas en
el instante anterior (t), ,mientras que las variables sin superndice corresponden a los
nuevos valores al avanzar el tiempo un incremento t.
Para la integracin en volumen y tiempo de los dems trminos de (4) se tiene
+
t t
t V
i
i
x
F
dV dt =
+ t t
t
z y x i
D
, , :
(F
i
) S
i
dt (5)
+ t t
t V
q dV dt =
+ t t
t
( q
P V
) dt (6)
en donde se ha definido D(F
i
) como la diferencia de los flujos F
i
evaluados en caras
opuestas del volumen de control, y S
i
es el rea de la cara normal a la direccin i:
D(F
x
) = (F
x
)
e
(F
x
)
w
; S
x
= y z (7a)
D(F
y
) = (F
y
)
n
(F
y
)
s
; S
y
= x z (7b)
D(F
z
) = (F
z
)
t
(F
z
)
b
; S
z
= x y (7c)
Las integrales en t de (5) y (6) requieren suponer alguna forma de variacin en el
tiempo de las variables contenidas en F
i
y Q
P
. Existen numerosos esquemas de
discretizacin temporal, algunos de los cuales, para lograr una aproximacin de orden
ms alto, utilizan informacin para ms de dos niveles de tiempo. En este presentacin
resumida se considera suficiente la discretizacin basada en los dos niveles de tiempo t
y t + t. Una forma general de representar a la mayora de los mtodos de esta clase es
por medio de la relacin
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
5
+ t t
t
P
dt = [
P
+ (1 )
P
0
] t (8)
que expresa la variacin de la variable entre t y t + t como una combinacin lineal
del valor que toma en esos dos instantes. Al emplear formas de este tipo para las
integrales en (5) y (6) se llega a la ecuacin discretizada
(
P
P
P P
0 0
)V + [
: , , i x y z
D(F
i
) + (1 )D( F
i
0
)] S
i
t = [ q
P
+ (1 )
0
P
q ] Vt
(9)
Para algunos valores particulares del factor de ponderacin la ecuacin se reduce a
alguno de los esquemas ms comnmente empleados: con = 1 se tiene el mtodo de
Euler implcito, con = 0,5 el mtodo de CrankNicolson, y con = 0 el mtodo de
Euler explcito. Consideremos aqu el primer caso, de manera que la ecuacin
discretizada queda como
(
P
P
P P
0 0
)
V
t
+ D
i x y z : , ,
(F
i
)
S
i
= q
P
V (10)
De modo anlogo se puede integrar la ecuacin de continuidad
t
x
i
( u
i
) = 0 (11)
y llegar a
(
P
P
0
)
V
t
+ D
i x y z : , ,
( u
i
)
S
i
= 0 (12)
Multiplicando Ec. (12) por
P
y restndola de (10) se obtiene
(
P
P
0
)
P
V
t
0
+ [
: , , i x y z
D(F
i
)
D( u
i
)
P
] S
i
= q
P
V (13)
De acuerdo a la definicin (2), para el clculo de los flujos totales F
i
en las
fronteras del volumen de control, es necesario evaluar la variable y sus derivadas en
dichas posiciones. Esto implica suponer una funcin de variacin espacial de entre
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
6
nodos adyacentes, para lo cual existen tambin varios esquemas posibles. En general, el
valor de en una frontera dada ser un promedio ponderado de los valores calculados
en los nodos entre los que se ubica, mientras que la derivada ser aproximada como un
mltiplo de la diferencia entre esos valores. As, para la configuracin generalizada
mostrada en la figura 5.4, el flujo F
i
a travs de la frontera k situada entre el nodo P y
su vecino K en la direccin positiva de la coordenada x
i
, se puede calcular como
(F
i
)
k
= ( u
i
)
k
[
k
P
+ (1
k
)
K
]
k (
K
P
) ; K : E, N, T (14)
donde los coeficientes
k
y
k
son normalmente funciones de la geometra de la malla,
los coeficientes de difusin , y otros parmetros. Ntese que aqu se utiliza la notacin
J y K para indicar los nodos vecinos de P a lo largo de la coordenada x
i
, de manera que
K representa a los nodos E, N o T dependiendo de si la coordenada es x, y o z. De igual
modo, J representa a los nodos W, S o B. Por su parte, las posiciones j y k corresponden
a las caras de la celda en direccin de los vecinos J o K. De este modo, las ecuaciones
que siguen son aplicables a las tres coordenadas, al aplicar los correspondientes
subndices a cada una.
Figura 4 Flujos totales a travs de las caras j y k del volumen de control.
Los esquemas de discretizacin difieren a este nivel bsicamente en el tipo de
funciones empleadas para
k
y
k
. Una expresin similar puede plantearse para el flujo
(F
i
)
j
en la frontera opuesta
(F
i
)
j
= ( u
i
)
j
[
j
J
+ (1
j
)
P
]
j (
P
J
) ; J : W, S, B (15)
P K J
j k
(F
i
)
k
(F
i
)
j
x
i
(x
i
)
k+
(x
i
)
k
(x
i
)
k
x
i
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
7
de manera que las diferencias D(F
i
) que aparecen en la ecuacin (13) se pueden llevar a
la forma
D(F
i
) =
K
K
J
J
+
P
P
(16)
donde
K
=
k
(1
k
) ( u
i
)
k
(17a)
J
=
j
+
j
( u
i
)
j
(17b)
P
=
K
+
J
+ [( u
i
)
k
( u
i
)
j
] =
K
+
J
+ D( u
i
) (17c)
Aplicando estos resultados en la ecuacin (13) para cada una de las direcciones en la
suma se obtiene la ecuacin general de discretizacin
A
P
P
+ A
E
E
+ A
W
W
+ A
N
N
+ A
S
S
+ A
T
T
+ A
B
B
= Q (18)
con
A
E
= [
e
(1
e
) ( u)
e
] S
x
(19a)
A
W
= [
w
+
w
( u)
w
] S
x
(19b)
A
N
= [
n
(1
n
) ( v)
n
] S
y
(19c)
A
S
= [
s
+
s
( v)
s
] S
y
(19d)
A
T
= [
t
(1
t
) ( w)
t
] S
z
(19e)
A
B
= [
b
+
b
( w)
b
] S
z
(19f)
t
V
A
P P
=
0 0
(19g)
Q = q
P V +
0 0
P P
A (19h)
A
P
= (A
E
+ A
W
+ A
N
+ A
S
+ A
T
+ A
B
) +
0
P
A (19i)
La ecuacin (18) relaciona el valor de la variable en el nodo central P con los
valores en los nodos vecinos, por medio de los coeficientes A
C
= {A
E
, . . . , A
B
}, y con
la fuente y el valor anterior de en el nodo P mediante la constante Q (en lo sucesivo
A
C
denota cualquiera de los seis coeficientes hacia los nodos vecinos, y c minscula
denota la correspondiente frontera del volumen de control en esa direccin). Para
problemas como los descritos por la ecuacin (1), en los cuales el valor de la variable
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
8
en un nodo slo puede influir en el valor de los nodos vecinos por procesos de
conveccin y difusin, se requiere que en la ecuacin discretizada los coeficientes A
C
tengan todos el mismo signo, y ste sea contrario al signo de A
P
, para que la ecuacin
entregue resultados fsicamente verosmiles. Esta distribucin de signos garantiza que
un incremento de en un nodo dado tienda a producir, con todas la restantes
condiciones inalteradas, un incremento en los nodos vecinos, y no una disminucin.
Los coeficientes se determinan, por lo tanto, de modo cumplan esta condicin.
La ecuacin (18) planteada para cada nodo da origen a un sistema de ecuaciones
algebraicas que substituye a la ecuacin diferencial original. Ya que las ecuaciones
diferenciales de cada una de las variables representadas por (tales como las tres
componentes de velocidad, escalares transportados por el flujo, etc.) estn conectadas
entre s, se resuelven secuencialmente los sistemas de ecuaciones para cada una de esas
variables, y el proceso es iterado hasta lograr convergencia de todas ellas. Por otra
parte, tales sistemas son tratados como sistemas lineales, por lo que al resolverlos sus
coeficientes permanecen constantes, y slo se recalculan en cada una de estas
iteraciones externas de acoplamiento.
Para el clculo de los coeficientes de transporte A
C
={A
E
, . . . , A
B
}, se deben
elegir las funciones para los parmetros y . La posibilidad ms simple en este
sentido la da el esquema de diferencias centradas, el cual supone una variacin lineal
de entre nodos adyacentes. En tal caso, los coeficientes A
C
en las ecuaciones (19) se
calculan con
c
=
( )
( )
x
x
i c
i c
+
y
c
=
c i
c
x ) (
; c : e, w, n, s, t, b (20)
(las distancias (x
i
)
c+
se definen en la figura 4. Ya que el nodo P est en el centro de la
celda se cumple que (x
i
)
j+
= (x
i
)
k
= x
i
/2).
Puede advertirse que dependiendo de las dimensiones (x
i
) del volumen de
control, asi como de los flujos convectivos u
i
a travs de sus caras, y de los
coeficientes de difusin , los coeficientes A
C
podran cambiar de signo. La influencia
de estos parmetros puede sintetizarse en el nmero de Peclet, para cada frontera c:
Pe
c
=
c
c i c i
x u
) ( ) (
(21)
en trminos del cual los coeficientes para los nodos generalizados K y J de la figura 4
quedan dados por
A
K
=
k [1 (1
k
) Pe
k
] S
i
(22a)
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
9
A
J
=
j
[1 +
j
Pe
j
] S
i
(22b)
Para el esquema de diferencias centradas definido por las expresiones (20) se tiene
entonces
a
K
=
k i
k
x ) (
k
k i
i
x
x
Pe
) ( 2
1
S
i
(23a)
a
J
=
j i
j
x ) (
(
(
+
j
j i
i
x
x
Pe
) ( 2
1
S
i
(23b)
y se cumple que A
K
< 0 para Pe
k
< 2(x
i
)
k
/x
i
y A
J
< 0 para Pe
j
> 2(x
i
)
j
/x
i
. Un
criterio general al respecto es entonces demandar que Pe< 2x
i
/x
i
en las fronteras de
todos los volmenes de control. Cuando las fronteras de estas celdas se definen en el
punto medio entre nodos vecinos, se cumple = 1/2 y se tiene el rango tpico de Pe<
2 para el cual se considera aplicable el mtodo de diferencias centradas. Esto restringe
fuertemente el empleo de diferencias centradas para problemas con intensa conveccin,
ya que el nico modo de mantener el nmero de Peclet dentro de los lmites permitidos
es utilizando mallas de discretizacin muy finas.
Una primera solucin a esta dificultad la proporciona el esquema de diferencias
"flujo arriba" (mtodo upwind), el cual calcula los flujos F
i
con
c
=
<
>
0 ) ( si ; 0
0 ) ( si ; 1
c i
c i
u
u
;
c
=
c i
c
x ) (
(24)
de modo que los coeficientes de la ecuacin de discretizacin quedan dados por
A
k
=
< (
>
0 Pe ; ) Pe 1
) (
0 Pe ;
) (
k i k
k i
k
k i
k i
k
S
x
S
x
(25a)
A
j
=
<
> + (
0 Pe ;
) (
0 Pe ; ) Pe 1
) (
j i
j i
j
j i j
j i
j
S
x
S
x
(25b)
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
10
y por consiguiente no se tornan positivos para ningn nmero de Peclet. El fundamento
de este mtodo est en el hecho de que a medida que Pe aumenta, prevalece la
conveccin sobre el efecto de difusin, por lo que se espera que el valor de la variable
en la frontera c est dominado por el valor que toma en el nodo flujo arriba de la
misma. Por medio del parmetro
c
en (24) se iguala entonces el valor de en la
frontera al valor que existe flujo arriba, y se anula la influencia del nodo flujo abajo. En
estas circunstancias, la variacin de entre nodos adyacentes tiene un comportamiento
exponencial, y su derivada evaluada en la frontera es, para Pe elevado, mucho menor
que lo que predice una funcin lineal. El mtodo upwind sin embargo mantiene la
misma forma lineal para calcular el flujo difusivo que la usada por las diferencias
centradas, produciendo una sobreestimacin de la difusin.
El desarrollo de esquemas de diferenciacin ms precisos ha sido guiado por la
solucin de la ecuacin (4) para el caso unidimensional estacionario y sin fuentes, en el
cual la ecuacin de transporte se reduce a
|
\
|
=
dx
d
u
dx
d
dx
dF
x
= 0 (26)
la cual, para
constante ( y dado que u es constante en este caso por continuidad),
puede resolverse en forma exacta. Con las condiciones (x
P
) =
P
y (x
E
) =
E
la
solucin resultante es
(x) =
P
+ (
E
P
)
( )
1 ) Pe exp(
1 / ) ( Pe exp
e
e P e
x x x
(27)
Al utilizar esta funcin para calcular
e
y (d/dx)
e
se obtiene para el flujo total en la
frontera e:
(F
x
)
e
= ( u)
e
P
( )
exp( )
u
e
e
Pe 1
(
E
P
) (28)
y anlogamente para la frontera opuesta w:
(F
x
)
w
= ( u)
w
W
( )
exp( )
u
w
w
Pe 1
(
P
W
) (29)
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
11
Comparando estas expresiones con las funciones generales (14) y (15) se observa que
es posible definir un esquema de diferenciacin para las tres direcciones haciendo
c
= 1 ;
c
=
( )
exp( )
u
c
c
Pe 1
(30)
en los coeficientes A
C
, el cual, para el caso unidimensional particular descrito, entrega
la solucin exacta
, y en general para problemas multidimensionales proporciona una
aproximacin mucho mejor para el comportamiento de la variable que el mtodo
upwind.
Los coeficientes se pueden calcular entonces como
A
K
=
k i
k
x ) (
S
i
(Pe
k
) (31a)
A
J
=
j i
j
x ) (
S
i
(Pe
j
) (31b)
con
(Pe) =
Pe
Pe exp( ) 1
(32)
A pesar de sus cualidades este mtodo es poco empleado en su forma original debido al
mayor tiempo de computacin que implican las funciones exponenciales. Por otra
parte, ya que el mtodo es exacto slo para el caso unidimensional particular descrito,
el utilizar la funcin exacta (Pe) no se justifica en otros casos. En tal situacin es
preferible aproximar la funcin (Pe) de algn modo que sea computacionalmente
eficiente.
Un mtodo de este tipo es el llamado esquema hbrido, el cual aproxima (Pe)
por tres tramos rectos:
(Pe) =
>
<
2 Pe ; 0
2 Pe ; 2 / Pe 1
2 Pe ; Pe
(33)
Aunque en la deduccin se supuso constante, las funciones obtenidas son todava la solucin exacta
en el caso en que sea diferente en los volmenes finitos colindantes en los que se aplican, en tanto se
considere uniforme su valor dentro de ellos, y el valor de en la interfaz se calcule segn el
procedimiento visto en clases.
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
12
Insertando esta funcin en las ecuaciones (31) se puede observar que el mtodo hbrido
coincide con el de diferencias centradas para Pe 2, mientras que fuera de este rango
se reduce a una forma similar al mtodo upwind dado por (24), pero ahora con
c
= 0,
de manera que el flujo difusivo es anulado para Pe> 2, eliminndose el principal
defecto del aquel mtodo. Aunque estrictamente la expresin 1 Pe/2 corresponde a la
de diferencias centradas cuando la interfaz est en el punto medio entre los nodos, el
mtodo hbrido es aplicable para cualquier ubicacin de ella, ya que la calidad del
ajuste de la funcin (33) a la forma exacta (32) no depende de tal ubicacin.
Si bien el esquema hbrido da buenos resultados en la mayora de las
aplicaciones, la desviacin respecto a la funcin exacta no resulta despreciable en torno
a Pe = 2, y adems puede resultar prematuro anular completamente el flujo difusivo
para valores de Pe inmediatamente mayores que 2. Un mtodo ms preciso es el de
ley de potencia (de Patankar), que utiliza la aproximacin
(Pe) =
>
< +
<
10 Pe ; 0
10 Pe 0 ; ) Pe 1 . 0 1 (
0 Pe 10 ; Pe ) Pe 1 . 0 1 (
10 Pe ; Pe
5
5
(34)
Para Pe > 10 esta funcin coincide con la del esquema hbrido, mientras que en el
rango intermedio las aproximaciones lineales son reemplazadas por una funcin que se
ajusta estrechamente a la funcin exacta, y cuyo costo computacional es todava
razonable. Este es el esquema de discretizacin finalmente adoptado en este trabajo. En
forma compacta, este esquema se puede representar por las ecuaciones (31) con
(Pe) = ( ) ( )
5
Pe 1 , 0 1 , 0 max + max(0 , Pe) (35)
2. Modificaciones a la Ecuacin de Discretizacin
Las expresiones dadas por las ecuaciones (19) para los coeficientes A
P
y Q de la
ecuacin de discretizacin son modificadas al construirse el sistema de ecuaciones a
resolver por tres procesos: la linealizacin del trmino fuente, la eliminacin del error
en conservacin de masa y la introduccin de coeficientes de relajacin.
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
13
2.1 Linealizacin del Trmino Fuente
Ya que se pretende que el sistema de ecuaciones sea lineal, cuando la fuente q
depende de de un modo no lineal, slo es posible representar tal dependencia por una
funcin linealizada
q = q
1
+ q
2
(36)
y resolver el sistema en forma iterativa, hasta una aproximacin suficiente del sistema
no lineal (en realidad se aprovecha el hecho de que la resolucin del sistema debe ser
iterativa de cualquier forma, debido a la conexin no lineal entre las diferentes
variables del sistema completo de ecuaciones diferenciales). Los coeficientes q
1
y q
2
pueden depender a su vez de y ya que se toman como constantes, se evalan con el
valor de obtenido en la iteracin anterior. Aunque siempre es posible calcular
directamente q en el nodo P, en su forma no lineal, y usar tal valor como constante al
evaluar el trmino Q, la linealizacin (36) acelera la convergencia a la solucin ya que
se aprovecha parte de la informacin sobre la dependencia de q con respecto a .
Al utilizar la funcin (36) para q evaluado en P, los coeficientes A
P
y Q en la
ecuacin (18) cambian a
A
P
= (A
E
+ A
W
+ A
N
+ A
S
+ A
T
+ A
B
) +
0
P
A q
2P V (37)
Q = q
1P V +
0 0
P P
A (38)
Ya que S
2P V se resta al valor anterior de A
P
, y dado que A
P
no puede ser negativo,
slo se admiten linealizaciones tales que q
2
sea siempre negativo, de modo de asegurar
la estabilidad numrica. Cuando esto no es posible se toma simplemente q
2
= 0 y q
1
=
q
P
.
2.2 Correccin por Fuente de Masa Aparente
Es usual que durante parte del proceso de resolucin iterativo de las ecuaciones
de acopladas para las variables , el campo de flujo no satisface la ecuacin de
continuidad. Al deducir la ecuacin de discretizacin se supuso que la conservacin de
masa se cumple, cuando se resta de (10) la ecuacin de continuidad integrada en el
volumen de control en la forma (12). Si ese no es el caso, durante el proceso de
iteracin el lado derecho de esa ecuacin no ser el valor terico cero sino algn valor
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
14
distinto, por lo que puede escribirse como
(
P
P
0
)
V
t
+ D
i x y z : , ,
( u
i
)
S
i
=
*
m
q (39)
donde
*
m
q representa el error numrico en la conservacin de masa, y acta como una
fuente aparente de masa en el volumen de control. Al restar esta ecuacin de (10) en
lugar de hacerlo con (12), se obtiene
(
P
P
0
)
P
V
t
0
+ [
: , , i x y z
D(F
i
)
D( u
i
)
P
] S
i
= q
P
V
*
m
q
P
(40)
El ltimo trmino del lado derecho es una fuente falsa de la variable , producida por la
fuente falsa de masa en la celda. De este modo el error en la conservacin de masa se
propaga a la conservacin de todas las dems propiedades, y el proceso de iteracin
puede resultar divergente. Para evitar esto se puede remover la fuente falsa de la
ecuacin (40), sumando un trmino de correccin que la anule. Ya que
P
no se conoce
antes de resolver la ecuacin, el mejor trmino de correccin posible es
P m
q
~
*
, con
P
~
el valor obtenido en la iteracin anterior. Por lo tanto, la ecuacin de discretizacin
debe obtenerse de
(
P
P
0
)
P
V
t
0
+ [
: , , i x y z
D(F
i
)
D( u
i
)
P
] S
i
= q
P
V
*
m
q (
P
P
~
) (41)
Se deduce entonces que la modificacin consiste en sumar respectivamente las
cantidades
*
m
q y
P m
q
~
*
a los coeficientes A
P
y Q anteriormente obtenidos. Sin embargo,
*
m
q puede resultar negativo en algunas celdas, dando lugar a la posibilidad de un
coeficiente A
P
tambin negativo, lo que tiene un efecto mucho peor que el error que se
intenta remover. En tales casos la ecuacin de discretizacin no se modifica. Por
consiguiente, A
P
y Q para la ecuacin (18) se calculan como
A
P
= (A
E
+ A
W
+ A
N
+ A
S
+ A
T
+ A
B
) +
0
P
A q
2P V + max(
*
m
q , 0) (42)
Q = q
1P V +
0 0
P P
A + max(
*
m
q , 0)
P
~
(43)
donde
*
m
q se obtiene de la ecuacin (39) en cada iteracin (es decir, se computa el
residuo de la ecuacin de conservacin de masa en cada celda).
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
15
2.3 Coeficientes de Relajacin
Debido a la naturaleza marcadamente no lineal del sistema de ecuaciones
diferenciales que se resuelve, es necesario incorporar para cada una de ellas un
coeficiente de relajacin en su ecuacin de discretizacin. El cambio que
experimentara
P
entre dos iteraciones globales sucesivas sera, al resolver la ecuacin
discretizada en su forma original
P
=
P
A
1
(A
E
E
+ A
W
W
+ A
N
N
+ A
S
S
+ A
T
T
+ A
B
B
Q)
P
~
(44)
donde
P
~
es, como antes, el valor resultante en la iteracin anterior. Se introduce ahora
un coeficiente de relajacin , de modo que el nuevo valor de
P
est dado por
P
=
P
~
+
P
(45)
La ecuacin de discretizacin a resolver toma entonces la forma
1
A
P
P
+ A
E
E
+ A
W
W
+ A
N
N
+ A
S
S
+ A
T
T
+ A
B
B
= Q
1
A
P
P
~
(46)
3 Determinacin del Campo de Flujo
Las ecuaciones de conservacin de momentum (Navier-Stokes) y masa son
analticamente suficientes para calcular el campo de flujo. No obstante, es bien
conocida la condicin especial que se presenta con las ecuaciones de momentum y de
continuidad para bajos nmeros de Mach, debido por una parte, al gradiente de presin
en las fuentes de momentum, y por otra parte, a la dbil conexin que se establece
entre la presin y la densidad, la cual pasa a ser una funcin bsicamente de la
temperatura. Luego, al tratar con casos donde el campo de flujo se puede considerar
isotrmico, la densidad se torna constante y la ecuacin de continuidad se reduce a la
condicin de divergencia cero:
u
x
i
i
= 0 (47)
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
16
Este hecho representa una dificultad para resolver iterativamente las ecuaciones de
transporte para = u, v, w, etc., en forma secuencial para una variable a la vez, ya que
la ecuacin de continuidad en la forma (47) no contiene una variable dependiente
adicional a las de las ecuaciones de momentum, sino que acta como una condicin de
compatibilidad para el campo de velocidades. No se cuenta entonces con una ecuacin
explcita para calcular la presin, sino que la distribucin de presiones est implcita en
la conexin entre las ecuaciones de momentum y de continuidad, puesto que el campo
de presin correcto dar origen a un campo de velocidades que satisface la ecuacin de
continuidad.
Aunque tericamente este problema slo debera existir si la densidad es
absolutamente constante, an persiste si la densidad cambia debido fundamentalmente
a variaciones de temperatura. Cuando la temperatura es variable, la ecuacin de
continuidad contiene las derivadas de la densidad, de manera que en principio esta
ecuacin puede acoplarse a las de momentum, y resolverla para la densidad como
variable dependiente, obtenindose luego la presin a partir de una ecuacin
terrmodinmica de estado. Sin embargo, la utilizacin de la densidad como una
variable dependiente principal del sistema de ecuaciones no resulta conveniente desde
el punto de vista numrico, debido a la diferencia en rdenes de magnitud entre los
gradientes de densidad y los de presin. As, para una ecuacin de estado de gas ideal
se tiene
p =
c
2
(48)
siendo c la velocidad del sonido y el cuociente entre los calores especficos a presin
y a volumen constante. Para un flujo casi incompresible las variaciones de c son
pequeas, y por lo tanto las diferencias espaciales finitas de p y pueden relacionarse
como
p =
c
2
(49)
Debido al elevado valor del coeficiente de proporcionalidad c
2
/, la evaluacin de los
gradientes de presin con una precisin suficiente para su utilizacin en las ecuaciones
de momentum implica el clculo de los gradientes de densidad con una precisin no
siempre obtenible en un computador, de modo que los errores de truncacin en la
representacin numrica de la densidad se amplifican al evaluar el gradiente de presin.
Por lo anterior, el tomar a la densidad como una variable dependiente principal
no resulta conveniente. Otra alternativa la constituyen los mtodos de vorticidad, los
cuales eliminan la presin de las ecuaciones de momentum aplicndoles el operador
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
17
rotacional. El resultado en tres dimensiones, es una ecuacin de transporte para el
vector de vorticidad, que substituye a la de momentum. Adicionalmente se introducen
dos funciones de corriente que determinan el vector de velocidad. Aunque este mtodo
prescinde del clculo de la presin, la complejidad del problema no disminuye (e
incluso puede aumentar), puesto que ahora es necesario resolver ecuaciones
diferenciales para las funciones de corriente, calcular a partir de ellas las componentes
de velocidad y resolver las ecuaciones para las tres componentes del vector de
vorticidad. Adicionalmente, la especificacin de condiciones de contorno en trminos
de vorticidad y funciones de corriente resulta ms complicada que cuando se hace
directamente en funcin de las velocidades.
Por lo tanto, el clculo directo del campo de presin es la alternativa ms
ventajosa. Para esto, es necesario derivar alguna ecuacin o procedimiento que permita
obtener la presin, en base a la informacin implcita en las ecuaciones de momentum
y continuidad. Una posibilidad en este sentido, es aplicar el operador de divergencia a
la ecuacin de momentum, e insertar en la forma resultante la ecuacin de continuidad.
Con esto se llega a una ecuacin para la presin en la forma de una ecuacin de
Poisson, que puede resolverse junto con las de momentum. Existen un grupo de
mtodos que se basan en esto (algunos de los cuales se vern ms adelante).
Otra familia de mtodos es la de los denominados mtodos de presin implcitos.
De stos, el mtodo SIMPLE (Semi-Implicit Method for Pressure Linked Equations)
que se describe en la seccin 3.2 es un ejemplo tpico.
3.1 Mallas Desplazadas
La evaluacin numrica del gradiente de presin para un volumen de control en
torno a un nodo P como el de la figura 4, implica calcular la diferencia entre los valores
de presin en caras opuestas del mismo: p
k
p
j
. Esta cantidad (multiplicada por el rea
de las caras) representa la fuerza neta que la presin ejerce sobre el volumen de control
en la direccin x
i
, y el grado de precisin que pueda lograrse en su evaluacin tiene una
incidencia importante en la exactitud de la solucin para el campo de velocidades.
La diferencia p
k
p
j
debe formularse en funcin de las presiones computadas en
las posiciones de los nodos, lo cual, al aplicar una interpolacin lineal para p
k
y p
j
conduce a
p
k
p
j
= (1 f
k
) p
K
f
j p
J
(1 f
k
f
j
) p
P
(50)
con f
k
= (x
i
)
k+
/(x
i
)
k
y f
j
= (x
i
)
j+
/(x
i
)
j
. Se observa que el coeficiente que
multiplica a p
P
es la resta de los que multiplican a p
K
y p
J
, y para la situacin que
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
18
generalmente se da, en que la geometra de la malla vara slo gradualmente de un
volumen de control al siguiente, dicho trmino resulta mucho menor que los otros dos,
de modo que p
k
p
j
pasa a ser funcin esencialmente de las presiones en los nodos K y
J. El caso extremo se tiene cuando las fronteras k y j quedan en el punto medio entre
los nodos, para el cual la expresin (50) se reduce a p
k
p
j
= ( p
K
p
J
)/2. Esto
significa que el gradiente de presin se calcula con la diferencia entre las presiones en
nodos alternados de la malla, y no entre nodos adyacentes, lo que implica que el grado
de resolucin efectivo que se tiene para la representacin numrica de p es inferior al
de la malla misma, afectndose adversamente la precisin del clculo (el esquema no
logra discriminar soluciones falsas con fluctuaciones espaciales del tipo tablero de
ajedrez).
Una situacin similar se presenta con la discretizacin de la ecuacin de
continuidad, donde es necesario evaluar las diferencias de velocidad en las caras del
volumen finito. Si las velocidades son almacenadas en los nodos P, E, W, etc., su
interpolacin en las posiciones e, w, etc., dar origen al clculo de diferencias de
velocidad entre nodos alternados de la malla.
Debido a lo anterior, es usual utilizar un sistema de mallas desplazadas, como el
que se muestra en la figura 5. La presin y las dems variables escalares son calculadas
y almacenadas en el nodo P, mientras que las componentes u, v y w de la velocidad se
calculan cada una en una malla desplazada en la direccin correspondiente. Para el
grupo completo de variables en cierta posicin se tienen por lo tanto cuatro volmenes
de control parcialmente traslapados: la celda centrada en P (VC
c
), y una celda propia
para cada una de las componentes de la velocidad (VC
u
, VC
v
y VC
w
).
Con esto se logra que los gradientes de presin para la ecuacin de momentum
integrada en estos volmenes de control desplazados, queden calculados con
diferencias entre nodos adyacentes, ya que como puede verse en la figura, las fronteras
entre las que debe tomarse la diferencia de presiones en las celdas para las velocidades
coinciden ahora con las posiciones P, E, W, etc., en las que se almacena la presin. De
igual modo, para la integracin de la ecuacin de continuidad en el volumen de control
VC
c
se dispone de las velocidades directamente en las fronteras del mismo, y las
diferencias de velocidad resultan tambin evaluadas entre posiciones adyacentes.
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
19
Figura 5 Mallas desplazadas para las componentes de velocidad.
3.2 Mtodo SIMPLE
El mtodo SIMPLE obtiene el campo de flujo a partir de una estimacin inicial
del campo de presin, mediante correcciones iterativas de las velocidades y la presin
hasta lograr que se cumplan las ecuaciones de momentum y continuidad.
La discretizacin de las ecuaciones de momentum sigue las mismas lneas que lo
expuesto en la seccin 1, con la diferencia que para cada una de ellas se emplea una
malla desplazada. Por lo tanto, en las ecuaciones de discretizacin el nodo central
corresponde en estos casos a alguna de las posiciones intermedias e, w, n, s, t o b. As,
para la ecuacin de discretizacin de u en torno a la posicin e se obtiene
+
vec
vec
u
vec e
u
e
u A u A = Q (p
E
p
P
) S
x
(51)
donde la suma se refiere a las seis posiciones vecinas que rodean a e. El trmino Q
contiene como antes la integracin en volumen de las fuentes, excepto el gradiente de
presin, el que se ha escrito explcitamente en el ltimo trmino de (51). Del mismo
modo, las ecuaciones de discretizacin para v en torno a n, y para w en torno a t son
P
S
W
N
u
VC
v
VC
u
x
y
VC
c
P
B
W
T
w
u
VC
w
VC
u
x
z
VC
c
w
n
v
u
s
e
w
e
b
t
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
20
+
vec
vec
v
vec n
v
n
v A v A = Q (p
N
p
P
) S
y
(52)
+
vec
vec
w
vec t
w
t
w A w A = Q (p
T
p
P
) S
z
(53)
Ya que el campo de presin no es conocido, se supone un campo estimativo p
, y las
ecuaciones (51) a (53) son resueltas con esta presin supuesta, de manera que sus
soluciones son slo estimaciones u
, v
, w
, para las velocidades:
= +
vec
P E vec
u
vec e
u
e
p p Q u A u A ) (
* * * *
S
x
(54a)
= +
vec
P N vec
v
vec n
v
n
p p Q v A v A ) (
* * * *
S
y
(54b)
= +
vec
P T vec
w
vec t
w
t
p p Q w A w A ) (
* * * *
S
z
(54c)
El valor de p
debe ser corregido de modo que las velocidades satisfagan la
ecuacin de continuidad. Para esto se introduce un trmino de correccin de presin p',
tal que el campo de presin correcto se obtenga como
p = p
+ p' (55)
Este cambio de presin producir a su vez velocidades corregidas
u = u
+ u' (56a)
v = v
+ v' (56b)
w = w
+ w' (56c)
donde u', v', w' son los correspondientes trminos de correccin para las compontes de
la velocidad.
Restando las ecuaciones (54a) de (51), (54b) de (52) y (54c) de (53) se tiene
= +
vec
P E vec
u
vec e
u
e
p p u A u A ) ( S
x
(57a)
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
21
= +
vec
P N vec
v
vec n
v
n
p p v A v A ) ( S
y
(57b)
= +
vec
P T vec
w
vec t
w
t
p p w A w A ) ( S
z
(57c)
No es conveniente intentar resolver inmediatamente estas ecuaciones para las
correcciones de velocidad, puesto que en las sumas sobre las posiciones vecinas, las
correcciones de velocidad contenidas en ellas involucran a su vez a sus propios
vecinos, de modo que la ecuacin final de correccin de velocidad contendr las
correcciones de presin para todos los nodos de la malla, tornndose excesivamente
complicada. De hecho, tal tratamiento equivaldra a una resolucin directa del campo
de flujo, que obtendra simultneamente las tres componentes de velocidad y la presin
correctas en un slo paso, sin necesidad de iteracin. Ya que de todos modos el
acoplamiento entre estas ecuaciones y las restantes ecuaciones de transporte debe
hacerse en forma iterativa, es preferible simplificar las ecuaciones (57) y obtener slo
valores aproximados para las correcciones de presin y velocidad, las cuales tendern
hacia la solucin exacta a medida que la iteracin progrese. La simplificacin que
introduce el mtodo SIMPLE en este punto consiste en omitir las sumas sobre los
vecinos en las ecuaciones (57), con lo cual se obtiene
) (
E P
u
e
x
e
p p
A
S
u
= (58a)
) (
N P
v
n
y
n
p p
A
S
v
= (58b)
) (
T P
w
t
z
t
p p
A
S
w
= (58c)
y as el clculo de las correcciones de velocidad es directo una vez obtenida la
correccin de presin. Es posible deducir una ecuacin para esta correccin de presin
a partir de la ecuacin de continuidad. La forma discretizada de sta corresponde a la
ecuacin (12), la cual expandida queda como
(
P
0
P
)
V
t
+ [( u)
e
( u)
w
]S
x
+ [( v)
n
( v)
s
]S
y
+ [( w)
t
( w)
b
]S
z
= 0 (59)
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
22
Si ahora se substituyen las velocidades en (59) por sus expresiones en trminos de la
correccin de presin (ver Ecs. (56) y (58)):
u
e
= ) (
*
E P
u
e
x
e
p p
A
S
u
+ ; u
w
= ) (
*
P W
u
w
x
w
p p
A
S
u
+ (60a)
v
n
= ) (
*
N P
v
n
y
n
p p
A
S
v
+ ; v
s
= ) (
*
P S
v
s
y
s
p p
A
S
v
+ (60b)
w
t
= ) (
*
T P
w
t
z
t
p p
A
S
w
+ ; w
b
= ) (
*
P B
w
b
z
b
p p
A
S
w
+ (60c)
se llega despus de agrupar convenientemente los trminos a la ecuacin de
discretizacin para p':
Q p A p A p A p A p A p A p A
B B T T S S N N W W E E P P
= + + + + + + (61)
donde
A
E
=
e
u
e
x
A
S
2
) (
(62a)
A
W
=
w
u
w
x
A
S
2
) (
(62b)
A
N
=
n
v
n
y
A
S
2
) (
(62c)
A
S
=
s
v
s
y
A
S
2
) (
(62d)
A
T
=
t
w
t
z
A
S
2
) (
(62e)
A
B
=
b
w
b
z
A
S
2
) (
(62f)
A
P
= (A
E
+ A
W
+ A
N
+ A
S
+ A
T
+ A
B
) (62g)
C. Rosales
IPM-468: Dinmica de Fluidos Computacional
23
Q = (
P
0
P
)
V
t
+ [( u
)
w
( u
)
e
]S
x
+ [( v
)
s
( v
)
n
]S
y
+ [( w
)
b
( w
)
t
]S
z
(62h)
La secuencia de clculos para resolver el campo de flujo consta entonces
bsicamente de los siguientes pasos:
1. Inicializar el campo de presin con una distribucin estimada p
.
2. Resolver los sistemas de ecuaciones de momentum (54) para obtener u
, v
y w
.
3. Resolver el sistema de ecuaciones (61) para la correccin de presin p'.
4. Calcular la presin corregida p sumando p' a p
.
5. Calcular las velocidades u, v y w corregidas segn las ecuaciones (60)
6. Resolver las ecuaciones de transporte para las otras variables que influyen en el
campo de flujo (por ejemplo, variables de turbulencia).
7. Volver al paso 2 y repetir el proceso tomando la presin corregida p como campo
inicial p
hasta lograr convergencia de todas las variables.
Potrebbero piacerti anche
- Circuito en ParaleloDocumento10 pagineCircuito en ParaleloBrayan Camacho20% (5)
- Conceptos Fundamentales de Quimica v3Documento366 pagineConceptos Fundamentales de Quimica v3Gabriela Rincón PrietoNessuna valutazione finora
- Ayudantia 2Documento2 pagineAyudantia 2Miguel Ángel Martínez DelgadoNessuna valutazione finora
- Ayudantia 1.2Documento2 pagineAyudantia 1.2Miguel Ángel Martínez DelgadoNessuna valutazione finora
- Ayudantia 1.1Documento1 paginaAyudantia 1.1Miguel Ángel Martínez DelgadoNessuna valutazione finora
- Presentacion CFD 2 PDFDocumento29 paginePresentacion CFD 2 PDFMiguel Ángel Martínez DelgadoNessuna valutazione finora
- Laboratorio 2 Unidad 6 AlumnoDocumento12 pagineLaboratorio 2 Unidad 6 AlumnopeopleNessuna valutazione finora
- Practica #1Documento4 paginePractica #1Jose Huaman LeivaNessuna valutazione finora
- TERMODINAMICADocumento17 pagineTERMODINAMICAIvonne Mercedes Gutierrez AtapaucarNessuna valutazione finora
- F 01 Vectores PDFDocumento3 pagineF 01 Vectores PDFSergioSaavedraNessuna valutazione finora
- Taller Semana 1 y 2 Decimo QuimicaDocumento4 pagineTaller Semana 1 y 2 Decimo QuimicaNatalia CastiblancoNessuna valutazione finora
- Problem As Potencial Electrico 3Documento2 pagineProblem As Potencial Electrico 3Tomás Amateco Reyes40% (5)
- Propiedades Coligativas - Ascenso Ebulloscópico PDFDocumento4 paginePropiedades Coligativas - Ascenso Ebulloscópico PDFAgustín Cardona NaranjoNessuna valutazione finora
- 5 Shell HornoDocumento56 pagine5 Shell Hornojose luis leon sotoNessuna valutazione finora
- Medidores de Energía EléctricaDocumento8 pagineMedidores de Energía EléctricaJuan Diego Cordoba AlvaradoNessuna valutazione finora
- 2 Do Informe MASDocumento20 pagine2 Do Informe MASvictorNessuna valutazione finora
- Capacitores PolarizadosDocumento6 pagineCapacitores PolarizadosPablo AsanzaNessuna valutazione finora
- 03ejer mecanicafluidos-M19A19Documento1 pagina03ejer mecanicafluidos-M19A19Jorge GuerreroNessuna valutazione finora
- Tarea 1 ELPODocumento29 pagineTarea 1 ELPONestor TiemposNessuna valutazione finora
- Tarea Caida Libre y Tiro Vertical - BDocumento2 pagineTarea Caida Libre y Tiro Vertical - BGael MartinezNessuna valutazione finora
- II Evaluacion Fisica5toDocumento2 pagineII Evaluacion Fisica5toelizabeth lucenaNessuna valutazione finora
- Guía de Práctica 1 - Ley de BoyleDocumento10 pagineGuía de Práctica 1 - Ley de BoyleJUAN DAVID GUERRA GUERRERONessuna valutazione finora
- PRACTICA 1 - 1er ParcialDocumento8 paginePRACTICA 1 - 1er ParcialGuisela Noelia GonzalesNessuna valutazione finora
- Reporte Práctica 2 Mecanica de FluidosDocumento8 pagineReporte Práctica 2 Mecanica de FluidosJesús Kevin Zarate FloresNessuna valutazione finora
- Sistema Métrico Decimal1Documento14 pagineSistema Métrico Decimal1Luis TaboadaNessuna valutazione finora
- Informe VelocistaDocumento13 pagineInforme VelocistaViera Navarro EinerNessuna valutazione finora
- Guia Nº. 2 Fisica Decimo Tercer Periodo 2020Documento6 pagineGuia Nº. 2 Fisica Decimo Tercer Periodo 2020EDWIN ANDRES ELJACH DUARTENessuna valutazione finora
- Ejercicios 1Documento2 pagineEjercicios 1Zabii& lopezNessuna valutazione finora
- 1290-18 Rev8 - 01 - PERDocumento7 pagine1290-18 Rev8 - 01 - PERleexsanoNessuna valutazione finora
- Practica de Respaso Fisica Computacional Ii Fis-622 Mayo-Agosto 2023Documento6 paginePractica de Respaso Fisica Computacional Ii Fis-622 Mayo-Agosto 2023bubloissNessuna valutazione finora
- Informe de FisicaDocumento16 pagineInforme de FisicaalexisltgaNessuna valutazione finora
- Lsiguencia Rvillalba nrc4940 Tarea3Documento5 pagineLsiguencia Rvillalba nrc4940 Tarea3José Luis NaguaNessuna valutazione finora
- Xdocs - PL - Guia Termodinamica Aplicada I 4 PDFDocumento5 pagineXdocs - PL - Guia Termodinamica Aplicada I 4 PDFelpilanNessuna valutazione finora
- Sem. 3 - MA - MAS - PEND-SIMPLE, PEND-FISICO - MAADocumento12 pagineSem. 3 - MA - MAS - PEND-SIMPLE, PEND-FISICO - MAAAndy JoaoNessuna valutazione finora