Potrebbero piacerti anche
- Diffuse Algorithms for Neural and Neuro-Fuzzy Networks: With Applications in Control Engineering and Signal ProcessingDa EverandDiffuse Algorithms for Neural and Neuro-Fuzzy Networks: With Applications in Control Engineering and Signal ProcessingNessuna valutazione finora
- ParaphraseDocumento51 pagineParaphrasevincent tekeyNessuna valutazione finora
- Lab 10Documento6 pagineLab 10Mei QiiNessuna valutazione finora
- Keyboard I 8051Documento3 pagineKeyboard I 8051sachinshymNessuna valutazione finora
- Appendix NDocumento54 pagineAppendix NDimas Fajar Ramadhan0% (1)
- Assignment1 PDFDocumento5 pagineAssignment1 PDFpristo sellerNessuna valutazione finora
- Temperature Control Using LabviewDocumento5 pagineTemperature Control Using LabviewReyyan KhalidNessuna valutazione finora
- MC 8051 Lab Manual 2012Documento163 pagineMC 8051 Lab Manual 2012Harieswar ReddyNessuna valutazione finora
- Software button debouncing in 40 charactersDocumento11 pagineSoftware button debouncing in 40 charactersEmanuel CrespoNessuna valutazione finora
- 8051 MICROCONTROLLER PROGRAMMING IN KEILDocumento8 pagine8051 MICROCONTROLLER PROGRAMMING IN KEILSenthil Kumar SNessuna valutazione finora
- Set an 18ms interrupt period using PIC Timer 0Documento3 pagineSet an 18ms interrupt period using PIC Timer 0f.last100% (1)
- 9300 Series Modbus RegistersDocumento76 pagine9300 Series Modbus RegistersFigura3xNessuna valutazione finora
- Representing Power SystemsDocumento17 pagineRepresenting Power SystemsDr. Gollapalli Naresh100% (1)
- Design of Binary Multiplier Using Adders-3017 PDFDocumento5 pagineDesign of Binary Multiplier Using Adders-3017 PDFAdrian Walter JavierNessuna valutazione finora
- COD Lab1 32x32 RegisterfileDocumento5 pagineCOD Lab1 32x32 RegisterfileQuang Hiệp NgôNessuna valutazione finora
- Source Port: 16 Bits: TCP Header FormatDocumento6 pagineSource Port: 16 Bits: TCP Header Format254186Nessuna valutazione finora
- Assembler Language - 8051powerpoint PresentationDocumento56 pagineAssembler Language - 8051powerpoint PresentationtauseeeeeeeeNessuna valutazione finora
- 8086 Trainer Kit User and Technical Reference Manual PDFDocumento71 pagine8086 Trainer Kit User and Technical Reference Manual PDFJohn Johnston0% (1)
- AVR Assembly Code AnalysisDocumento15 pagineAVR Assembly Code Analysisrazorblademk2Nessuna valutazione finora
- DSP Lab2 ReportDocumento18 pagineDSP Lab2 ReportNguyễn TàiNessuna valutazione finora
- Lab 5Documento8 pagineLab 5robertoNessuna valutazione finora
- Computer Engineering Experiment 3: Carry Lookahead AddersDocumento7 pagineComputer Engineering Experiment 3: Carry Lookahead AddersIn Fee Knee TeaNessuna valutazione finora
- Code Composer Studio v4 Assembly Project: DSP Lab Manual, Dept. of Ece, Nitk 1Documento8 pagineCode Composer Studio v4 Assembly Project: DSP Lab Manual, Dept. of Ece, Nitk 1Jayaram Reddy M K100% (1)
- Clap CounterDocumento2 pagineClap CounterRiddhi Hiren KakkaNessuna valutazione finora
- I - o Programming in 8051 CDocumento6 pagineI - o Programming in 8051 CNaresh Ram SurisettiNessuna valutazione finora
- Laboratory2 Marking SchemeDocumento12 pagineLaboratory2 Marking SchemeAmna EhtshamNessuna valutazione finora
- Reversible Logic Gates and Its PerformancesDocumento14 pagineReversible Logic Gates and Its PerformancesShaik Sohel PashaNessuna valutazione finora
- Amplitude Modulation and DemodulationDocumento3 pagineAmplitude Modulation and DemodulationRaj Mehra MeharNessuna valutazione finora
- 8086 Microprocessor Lab 1Documento7 pagine8086 Microprocessor Lab 1Tyler BarneyNessuna valutazione finora
- Lab 11 DAC and ADC Full PackageDocumento5 pagineLab 11 DAC and ADC Full PackageLoveWorldCanadaNessuna valutazione finora
- Step Response of RC Circuits 1. Objectives: BEE 233 Laboratory-2Documento7 pagineStep Response of RC Circuits 1. Objectives: BEE 233 Laboratory-2Marib SirajNessuna valutazione finora
- 8255 Ppi ExamplesDocumento10 pagine8255 Ppi Examplesvenky258100% (1)
- Entreprise Dynamics Reference Guide Basic AtomsDocumento28 pagineEntreprise Dynamics Reference Guide Basic AtomsTobias Alexander MarkussenNessuna valutazione finora
- OpenFlow Circuit Switch Specification v0.3Documento16 pagineOpenFlow Circuit Switch Specification v0.3Dostojev_84Nessuna valutazione finora
- RP Jain Adc DacDocumento27 pagineRP Jain Adc DacAnand SinghNessuna valutazione finora
- Assignment of CAODocumento17 pagineAssignment of CAODhiraj SardaNessuna valutazione finora
- Chapter 2 - Microcontroller Architecture & Assembly LanguageDocumento41 pagineChapter 2 - Microcontroller Architecture & Assembly LanguageJiachyi Yeoh100% (1)
- Tea Tiny AlgorithmDocumento4 pagineTea Tiny AlgorithmramachandraNessuna valutazione finora
- DFT/ FFT Using TMS320C5515 TM eZDSP USB Stick: Via CCS and MatlabDocumento12 pagineDFT/ FFT Using TMS320C5515 TM eZDSP USB Stick: Via CCS and MatlabTrung Hoang PhanNessuna valutazione finora
- Implementation of Digital Lock Using VHDLDocumento13 pagineImplementation of Digital Lock Using VHDLVaibhav TripathiNessuna valutazione finora
- FSM in VHDLDocumento10 pagineFSM in VHDLkunalsekhri123Nessuna valutazione finora
- Interfacing Programs For 8085Documento37 pagineInterfacing Programs For 8085archankumarturagaNessuna valutazione finora
- Cs2252 - MPMC 16 M With Answers Upto 2Documento40 pagineCs2252 - MPMC 16 M With Answers Upto 2archumeenabaluNessuna valutazione finora
- Interface 7-segment LED display using 89C51 microcontrollerDocumento5 pagineInterface 7-segment LED display using 89C51 microcontrollerArkadip GhoshNessuna valutazione finora
- Real-Time System AssignmentDocumento4 pagineReal-Time System AssignmentTommy Kyen'de BilNessuna valutazione finora
- Automatic street light control using RTC microcontrollerDocumento42 pagineAutomatic street light control using RTC microcontrollerSaravanan Viswakarma0% (2)
- Lab 5 Data Transfer: Y. Use The Simulator To Change The X Value and Single-Step Through TheDocumento3 pagineLab 5 Data Transfer: Y. Use The Simulator To Change The X Value and Single-Step Through Thesabi1234Nessuna valutazione finora
- Interfacing Hex Keypad To 8051.Documento5 pagineInterfacing Hex Keypad To 8051.RejinNessuna valutazione finora
- Dchuynh HW4Documento5 pagineDchuynh HW4Dan HuynhNessuna valutazione finora
- 8255Documento34 pagine8255Manjula Bn100% (1)
- Siemens S7 Status Word: Bit PositionsDocumento5 pagineSiemens S7 Status Word: Bit Positionsmanas3sNessuna valutazione finora
- Direct Memory Access (DMA) Is A Feature of Modern Computers That Allows Certain HardwareDocumento15 pagineDirect Memory Access (DMA) Is A Feature of Modern Computers That Allows Certain HardwareAshutosh KumarNessuna valutazione finora
- 16 Bit CalculatorDocumento17 pagine16 Bit CalculatorPankaj JaiswalNessuna valutazione finora
- Report On 4x1 MultiplexerDocumento17 pagineReport On 4x1 MultiplexerPRAVEEN KUMAWATNessuna valutazione finora
- 6 Single Bit InstructionsDocumento7 pagine6 Single Bit Instructionsgopi_vasudevNessuna valutazione finora
- Embedded LabDocumento98 pagineEmbedded LabRajkumarNessuna valutazione finora
- Ripple Carry and Carry Lookahead Adders: 1 ObjectivesDocumento8 pagineRipple Carry and Carry Lookahead Adders: 1 ObjectivesYasser RaoufNessuna valutazione finora
- Exclusive or Gate and It's ApplicationsDocumento6 pagineExclusive or Gate and It's ApplicationsRohit PatilNessuna valutazione finora
- Analog Communications Lab ManualDocumento137 pagineAnalog Communications Lab Manualsiva100% (1)
- Assignment 1Documento9 pagineAssignment 1Smarajit MishraNessuna valutazione finora
- Muammer Yildiz Magnet Motor PATENTDocumento73 pagineMuammer Yildiz Magnet Motor PATENTSilvanei Fonseca LeandroNessuna valutazione finora
- Nrf24l01 Tutorial 2 Pic18Documento4 pagineNrf24l01 Tutorial 2 Pic18Eduardo LXNessuna valutazione finora
- The Pneumatic Hybrid Vehicle - A New Concept For Fuel Consumption ReductionDocumento285 pagineThe Pneumatic Hybrid Vehicle - A New Concept For Fuel Consumption ReductiontrajkanNessuna valutazione finora
- Ospv MountingmanualDocumento1 paginaOspv MountingmanualSilvanei Fonseca LeandroNessuna valutazione finora
- nRF24L01 Tutorial 1Documento10 paginenRF24L01 Tutorial 1Silvanei Fonseca LeandroNessuna valutazione finora
- Nrf24l01 Tutorial 4Documento5 pagineNrf24l01 Tutorial 4Silvanei Fonseca LeandroNessuna valutazione finora
- nRF24L01P Product Specification 1 0Documento78 paginenRF24L01P Product Specification 1 0CaelumBlimpNessuna valutazione finora
- Webfmx GuideDocumento92 pagineWebfmx GuideSilvanei Fonseca Leandro100% (1)
- Nrf24l01 Tutorial 1 Pic18Documento9 pagineNrf24l01 Tutorial 1 Pic18Silvanei Fonseca LeandroNessuna valutazione finora
- Lazarus and AndroidDocumento11 pagineLazarus and AndroidSilvanei Fonseca LeandroNessuna valutazione finora
- Keyes Funduino ConnectionsDocumento1 paginaKeyes Funduino ConnectionsSilvanei Fonseca LeandroNessuna valutazione finora
- FR4.6.UserManual enDocumento238 pagineFR4.6.UserManual enAgung RamdhaniNessuna valutazione finora
- Adafruit Optical Fingerprint SensorDocumento15 pagineAdafruit Optical Fingerprint SensorSilvanei Fonseca LeandroNessuna valutazione finora
- Jaybird 2 1 JDBC Driver ManualDocumento103 pagineJaybird 2 1 JDBC Driver ManualSilvanei Fonseca LeandroNessuna valutazione finora
- Stock PartDocumento20 pagineStock PartGReyNessuna valutazione finora
- Instruction and Maintenance Manual: Silenced Screw Rotary Compressor UnitsDocumento34 pagineInstruction and Maintenance Manual: Silenced Screw Rotary Compressor UnitsJohnny Diaz VargasNessuna valutazione finora
- Sustainable Energy and Resource ManagementDocumento318 pagineSustainable Energy and Resource ManagementRajdeepSenNessuna valutazione finora
- Fiedler's Contingency Model of Leadership Effectiveness: Background and Recent DevelopmentsDocumento24 pagineFiedler's Contingency Model of Leadership Effectiveness: Background and Recent DevelopmentsEdielyn Gonzalvo GutierrezNessuna valutazione finora
- Compressive Strength, Chloride Diffusivity and Pore Structure of High Performance Metakaolin and Silica Fume ConcreteDocumento8 pagineCompressive Strength, Chloride Diffusivity and Pore Structure of High Performance Metakaolin and Silica Fume ConcreteAboalmaail AlaminNessuna valutazione finora
- Net HSMDocumento4 pagineNet HSMJosé Tudela de la RosaNessuna valutazione finora
- Civilstrips Installation NotesDocumento3 pagineCivilstrips Installation NotesKoeswara SofyanNessuna valutazione finora
- Centrifugal PumpsDocumento20 pagineCentrifugal PumpsPiccollo640780% (5)
- Tesla CSRDocumento15 pagineTesla CSRM.Bhaskar0% (1)
- The Contemporary WorldDocumento9 pagineThe Contemporary WorldDennis RaymundoNessuna valutazione finora
- ACEEE - Best Practices For Data Centres - Lessons LearnedDocumento12 pagineACEEE - Best Practices For Data Centres - Lessons LearnedtonybudgeNessuna valutazione finora
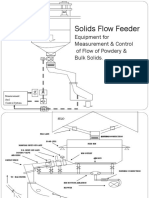
- Solids Flow Feeder Equipment for Precise Measurement & ControlDocumento7 pagineSolids Flow Feeder Equipment for Precise Measurement & ControlAbhishek DuttaNessuna valutazione finora
- Mara Vatz, "Knowing When To Stop: The Investigation of Flight 191"Documento30 pagineMara Vatz, "Knowing When To Stop: The Investigation of Flight 191"MIT Comparative Media Studies/WritingNessuna valutazione finora
- VRMP Projects - #973 Hgu Reformer Insulation Monthly Completion Plan Project: Reformer Works - HGU-EPCC 6, HPCL, VIZAGDocumento1 paginaVRMP Projects - #973 Hgu Reformer Insulation Monthly Completion Plan Project: Reformer Works - HGU-EPCC 6, HPCL, VIZAGsusantaNessuna valutazione finora
- Riveting vs. WeldingDocumento5 pagineRiveting vs. WeldingNikhilVinay100% (1)
- SR.11.10961 - Sour Well Design GuideDocumento52 pagineSR.11.10961 - Sour Well Design GuideMahmoud Ahmed Ali Abdelrazik100% (1)
- Sample:OPS-English Evaluation FormDocumento3 pagineSample:OPS-English Evaluation FormshieroNessuna valutazione finora
- DBX DriveRack PA 2 BrochureDocumento2 pagineDBX DriveRack PA 2 BrochureSound Technology LtdNessuna valutazione finora
- Sevice Manual BOBCAT S630 PDFDocumento890 pagineSevice Manual BOBCAT S630 PDFArtemio Garcia Barrientos100% (11)
- WWW - Unitoperation Heat1Documento12 pagineWWW - Unitoperation Heat1mahendra shakyaNessuna valutazione finora
- Project: Water Supply Layout Finals Drawn By: 20141142805 Date: 10/11/2018 Sheet No. 1 of 2Documento1 paginaProject: Water Supply Layout Finals Drawn By: 20141142805 Date: 10/11/2018 Sheet No. 1 of 2Jabber Reyes AmborNessuna valutazione finora
- FloEFD For Creo InstallDocumento18 pagineFloEFD For Creo InstallDarko MarjanovicNessuna valutazione finora
- PLAXIS Tutorial ManualDocumento124 paginePLAXIS Tutorial ManualPeteris Skels100% (2)
- SAP-Press - Abap Development For Sap HanaDocumento30 pagineSAP-Press - Abap Development For Sap HananicocastanioNessuna valutazione finora
- Gold Series Dust Collector: Installation, Operation and MaintenanceDocumento85 pagineGold Series Dust Collector: Installation, Operation and MaintenanceDAVID ALFONSO CARABALLO PATIÑONessuna valutazione finora
- Post TensioningDocumento13 paginePost TensioningAbdullah AhamedNessuna valutazione finora
- United States Patent (19) : HoferDocumento7 pagineUnited States Patent (19) : Hoferjoel marshallNessuna valutazione finora
- Text Programming Guide For iOSDocumento106 pagineText Programming Guide For iOSPetr MánekNessuna valutazione finora
- Ee-316 - Circuit Theory LabDocumento47 pagineEe-316 - Circuit Theory LabsureshhasiniNessuna valutazione finora
- 2007 Output Stops RemovedDocumento45 pagine2007 Output Stops RemovedAisyah DzulqaidahNessuna valutazione finora