Potrebbero piacerti anche
- Combining Experimental Data, CFD, and 6-DOF Simulation To DevelopDocumento19 pagineCombining Experimental Data, CFD, and 6-DOF Simulation To Developchoiwon1Nessuna valutazione finora
- Flight Trajectory Simulation of Fluid Payload ProjectilesDocumento8 pagineFlight Trajectory Simulation of Fluid Payload ProjectilesjamesNessuna valutazione finora
- Modeling of Launch Vehicle During The Lift-Off Phase in AtmosphereDocumento61 pagineModeling of Launch Vehicle During The Lift-Off Phase in AtmosphereMatthew AustinNessuna valutazione finora
- Standard Deviation LV EnvironmentDocumento7 pagineStandard Deviation LV Environmentmajid shahzadNessuna valutazione finora
- 2 Presentation AVD 5aug 2022 01Documento7 pagine2 Presentation AVD 5aug 2022 01Nobara KugisakiNessuna valutazione finora
- Intelligent Control of A Ducted-Fan VTOL UAV With Conventional Control SurfacesDocumento285 pagineIntelligent Control of A Ducted-Fan VTOL UAV With Conventional Control SurfacesTushar KoulNessuna valutazione finora
- Pitch Control System PDFDocumento6 paginePitch Control System PDFGraig LenoNessuna valutazione finora
- 319 10 Flight Termination Systems CommonalityStandard (Public Release)Documento487 pagine319 10 Flight Termination Systems CommonalityStandard (Public Release)gokhanNessuna valutazione finora
- Control and Instrumentation Lab (AV 435)Documento3 pagineControl and Instrumentation Lab (AV 435)Nobara KugisakiNessuna valutazione finora
- Courses Uploads Attachment 112Documento6 pagineCourses Uploads Attachment 112Ahmad SalahNessuna valutazione finora
- Autopilot Control SystemDocumento13 pagineAutopilot Control SystemGamePlay DistinctNessuna valutazione finora
- SDSA - User Manual: Main Application Window Application Interface ElementsDocumento37 pagineSDSA - User Manual: Main Application Window Application Interface ElementsdnanaNessuna valutazione finora
- Aerosim DatasheetDocumento2 pagineAerosim Datasheetfrank_grimesNessuna valutazione finora
- Mathavaraj 2015Documento9 pagineMathavaraj 2015Mysonic NationNessuna valutazione finora
- MSC NASTRAN AeroelasticityDocumento2 pagineMSC NASTRAN Aeroelasticitymat2230Nessuna valutazione finora
- 1 Paracaidas PDFDocumento117 pagine1 Paracaidas PDFDavid SorianoNessuna valutazione finora
- Design Proposal Presentation Final SlidesDocumento34 pagineDesign Proposal Presentation Final SlidesEkin OrerNessuna valutazione finora
- Robotic ArmDocumento8 pagineRobotic ArmNoopur GandhiNessuna valutazione finora
- 1 - UAV Formation Flight Control and Formation Switch Strategy PDFDocumento6 pagine1 - UAV Formation Flight Control and Formation Switch Strategy PDFLuthfi YahyaNessuna valutazione finora
- Last MergedDocumento46 pagineLast MergedMingle ClickNessuna valutazione finora
- Ad PDFDocumento2 pagineAd PDFChirag PubgNessuna valutazione finora
- Time-To-go Polynomial Guidance LawsDocumento5 pagineTime-To-go Polynomial Guidance Lawsmykingboody2156Nessuna valutazione finora
- Order-Based Resonance Identification Using Operational PolyMAXDocumento10 pagineOrder-Based Resonance Identification Using Operational PolyMAXRajesh KachrooNessuna valutazione finora
- SARDocumento204 pagineSARArash MazandaraniNessuna valutazione finora
- Orbital MechanicsDocumento28 pagineOrbital MechanicsMartin Schweighart MoyaNessuna valutazione finora
- Aerodynamic Influence Coefficients MethodsDocumento106 pagineAerodynamic Influence Coefficients Methodskarthekeyanmenon100% (1)
- Trejectory Ofr Fin Artillery RocketDocumento14 pagineTrejectory Ofr Fin Artillery RocketasifkkNessuna valutazione finora
- Kabe AIAA Keynote PDF Figures 04102013Documento55 pagineKabe AIAA Keynote PDF Figures 04102013Ds HarrisNessuna valutazione finora
- Application of Math Principles To Engineering Problems 11th Edition 7-18-18 PDFDocumento431 pagineApplication of Math Principles To Engineering Problems 11th Edition 7-18-18 PDFWanjiru randolphNessuna valutazione finora
- Method For Flutter Aero-Servoelastic Open: Loop AnalysisDocumento12 pagineMethod For Flutter Aero-Servoelastic Open: Loop Analysismohammad dehghanfarsiNessuna valutazione finora
- Active Model Rocket Stabilization Via Cold Gas Thrusters - Danylo MalyutaDocumento12 pagineActive Model Rocket Stabilization Via Cold Gas Thrusters - Danylo MalyutaTim MarvinNessuna valutazione finora
- Navigation and Guidance: Dr. Shashi Ranjan KumarDocumento26 pagineNavigation and Guidance: Dr. Shashi Ranjan KumarNinad KaleNessuna valutazione finora
- Harmonic EspritDocumento9 pagineHarmonic EspritNizar TayemNessuna valutazione finora
- Ces Materials Selection GuidelinesDocumento31 pagineCes Materials Selection GuidelinesMirudulaPuguajendiNessuna valutazione finora
- Yeo StructuralLoads AHS 2014 PDFDocumento26 pagineYeo StructuralLoads AHS 2014 PDFKarad KaradiasNessuna valutazione finora
- Hydraulics: Prof. Mohammad Saud AfzalDocumento47 pagineHydraulics: Prof. Mohammad Saud AfzalTaslim Alam RafiNessuna valutazione finora
- ANSYS Energico Users GuideDocumento140 pagineANSYS Energico Users GuideV CafNessuna valutazione finora
- Navigation and Guidance: Dr. Shashi Ranjan KumarDocumento36 pagineNavigation and Guidance: Dr. Shashi Ranjan KumarNinad KaleNessuna valutazione finora
- 2008 - Filkovic - Graduate Work - 3D Panel MethodDocumento70 pagine2008 - Filkovic - Graduate Work - 3D Panel MethodMatej AndrejašičNessuna valutazione finora
- Introduction To Koopman Operator Theory of Dynamical SystemsDocumento31 pagineIntroduction To Koopman Operator Theory of Dynamical SystemsArsh UppalNessuna valutazione finora
- Aero Masters Thesis Delft NLDocumento103 pagineAero Masters Thesis Delft NLRichard HilsonNessuna valutazione finora
- Open AeroDocumento16 pagineOpen AerodasdllllNessuna valutazione finora
- Aerodynamic Modeling of A Membrane WingDocumento236 pagineAerodynamic Modeling of A Membrane Wingmatthew_6Nessuna valutazione finora
- Algorithm For Fixed-Range Optimal TrajectoriesDocumento86 pagineAlgorithm For Fixed-Range Optimal Trajectoriesmykingboody2156Nessuna valutazione finora
- Launch VehicleDocumento21 pagineLaunch VehicleShilpi KaushikNessuna valutazione finora
- The Fuzzy Logic Control of Aircraft (Farah)Documento120 pagineThe Fuzzy Logic Control of Aircraft (Farah)Rogerio GuahyNessuna valutazione finora
- A Micro-Satellite Thermal Control AnalysisDocumento25 pagineA Micro-Satellite Thermal Control AnalysisoliveirarenanfelipeNessuna valutazione finora
- Aerodynamics of Spin Stabilised MissilesDocumento23 pagineAerodynamics of Spin Stabilised MissilesAries SattiNessuna valutazione finora
- Mettler Bernard 2000 1Documento25 pagineMettler Bernard 2000 1sanjesh100% (1)
- A Note On Stability of Motion of A ProjectileDocumento7 pagineA Note On Stability of Motion of A Projectileerkan_tiryakiNessuna valutazione finora
- Extended Kalman Filter For UAV AttitudeDocumento8 pagineExtended Kalman Filter For UAV AttitudebestatscienceNessuna valutazione finora
- Aerospace America - December 2010 (True PDFDocumento120 pagineAerospace America - December 2010 (True PDFammarov123Nessuna valutazione finora
- Robotics Systems ReportDocumento32 pagineRobotics Systems ReportkenteshNessuna valutazione finora
- System Architecture Modeling For Electronic Systems Using MathWorks System Composer and SimulinkDocumento10 pagineSystem Architecture Modeling For Electronic Systems Using MathWorks System Composer and SimulinkOnur OzdemirNessuna valutazione finora
- Thesis - Ishan Aggarwal - New Word PDFDocumento67 pagineThesis - Ishan Aggarwal - New Word PDF1105456Nessuna valutazione finora
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachDa EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNessuna valutazione finora
- The Design and Simulated Performance of the Attitude Determination and Control System of a Gravity Gradient Stabilized Cube SatelliteDa EverandThe Design and Simulated Performance of the Attitude Determination and Control System of a Gravity Gradient Stabilized Cube SatelliteNessuna valutazione finora
- Hybrid Dynamical Systems: Modeling, Stability, and RobustnessDa EverandHybrid Dynamical Systems: Modeling, Stability, and RobustnessNessuna valutazione finora
- CPCCCM2006 - Learner Guide V1.0Documento89 pagineCPCCCM2006 - Learner Guide V1.0Sid SharmaNessuna valutazione finora
- Lesson 2 (Locating Main Ideas)Documento18 pagineLesson 2 (Locating Main Ideas)Glyneth Dela TorreNessuna valutazione finora
- A Tribute To Fernando L. L. B. Carneiro (1913 - 2001)Documento2 pagineA Tribute To Fernando L. L. B. Carneiro (1913 - 2001)Roberto Urrutia100% (1)
- Cubic FunctionsDocumento9 pagineCubic FunctionsShrey JainNessuna valutazione finora
- Global 1 Syllabus Fall 2014Documento5 pagineGlobal 1 Syllabus Fall 2014Henry WangNessuna valutazione finora
- Henderson 1Documento4 pagineHenderson 1danielNessuna valutazione finora
- COMP2101 / CS20S - Discrete Mathematics Generating Functions and Recurrence RelationsDocumento7 pagineCOMP2101 / CS20S - Discrete Mathematics Generating Functions and Recurrence RelationsjevanjuniorNessuna valutazione finora
- Babylonian Sacred Words of Power - Carl Nagel 1988Documento66 pagineBabylonian Sacred Words of Power - Carl Nagel 1988leplafonfagnon90% (99)
- USACODocumento94 pagineUSACOLyokoPotterNessuna valutazione finora
- Mmims5elesson BiomesDocumento3 pagineMmims5elesson Biomesapi-490524730100% (1)
- Kaizen Idea - Sheet: Suitable Chairs To Write Their Notes Faster & Easy Method While TrainingDocumento1 paginaKaizen Idea - Sheet: Suitable Chairs To Write Their Notes Faster & Easy Method While TrainingWahid AkramNessuna valutazione finora
- Gerin Bagaslino - 52417512Documento13 pagineGerin Bagaslino - 52417512Gerin BagaslinoNessuna valutazione finora
- EgoismDocumento3 pagineEgoism123014stephenNessuna valutazione finora
- Oliver vs. Philippine Savings BankDocumento14 pagineOliver vs. Philippine Savings BankAmeir MuksanNessuna valutazione finora
- Practice Makes Perfect English Conversation UNIT 9Documento10 paginePractice Makes Perfect English Conversation UNIT 9Thaís C C MirandaNessuna valutazione finora
- Evaluation FormDocumento3 pagineEvaluation FormFreyjaa MabelinNessuna valutazione finora
- Charity Connecting System: M.Archana, K.MouthamiDocumento5 pagineCharity Connecting System: M.Archana, K.MouthamiShainara Dela TorreNessuna valutazione finora
- Job Stress, Workload, Environment and Employee Turnover IntentionsDocumento13 pagineJob Stress, Workload, Environment and Employee Turnover IntentionsYuni SasieNessuna valutazione finora
- 01CDT00330 - Lakeshore - 330 - ManualDocumento104 pagine01CDT00330 - Lakeshore - 330 - ManualSPMS_MELECNessuna valutazione finora
- 1 BN Sintax SemanticsDocumento10 pagine1 BN Sintax SemanticsJackNessuna valutazione finora
- Performing and Reporting Cost Analysis During The Design Phase of A ProjectDocumento4 paginePerforming and Reporting Cost Analysis During The Design Phase of A ProjectAhmad Zubair RasulyNessuna valutazione finora
- MAK Halliday The Language of ScienceDocumento268 pagineMAK Halliday The Language of ScienceJeneiGabriellaOfő100% (4)
- Saint Albert Polytechnic College, Inc. Bachelor of Science in Office AdministrationDocumento15 pagineSaint Albert Polytechnic College, Inc. Bachelor of Science in Office AdministrationAustin Grey Pineda MacoteNessuna valutazione finora
- Joshi C M, Vyas Y - Extensions of Certain Classical Integrals of Erdélyi For Gauss Hypergeometric Functions - J. Comput. and Appl. Mat. 160 (2003) 125-138Documento14 pagineJoshi C M, Vyas Y - Extensions of Certain Classical Integrals of Erdélyi For Gauss Hypergeometric Functions - J. Comput. and Appl. Mat. 160 (2003) 125-138Renee BravoNessuna valutazione finora
- PlagarisimDocumento2 paginePlagarisimabdullah0336.juttNessuna valutazione finora
- A Theory of Ethnic Group BoundariesDocumento28 pagineA Theory of Ethnic Group BoundariesAbdellatif El BekkariNessuna valutazione finora
- Learn C++ Programming LanguageDocumento322 pagineLearn C++ Programming LanguageAli Eb100% (8)
- The Structure of Deception: Validation of The Lying Profile QuestionnaireDocumento16 pagineThe Structure of Deception: Validation of The Lying Profile QuestionnaireNancy DrewNessuna valutazione finora
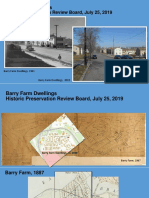
- Barry Farm Powerpoint SlidesDocumento33 pagineBarry Farm Powerpoint SlidessarahNessuna valutazione finora
- For Purposeful and Meaningful Technology Integration in The ClassroomDocumento19 pagineFor Purposeful and Meaningful Technology Integration in The ClassroomVincent Chris Ellis TumaleNessuna valutazione finora