Potrebbero piacerti anche
- Quantum Energy Generator - Free Energy Device BlueprintsDocumento35 pagineQuantum Energy Generator - Free Energy Device Blueprintsenerchi111181% (16)
- Fault Code 432 Accelerator Pedal or Lever Idle Validation Circuit - Out of CalibrationDocumento10 pagineFault Code 432 Accelerator Pedal or Lever Idle Validation Circuit - Out of CalibrationAhmedmahNessuna valutazione finora
- Generator Relay SettingsDocumento22 pagineGenerator Relay SettingsKuntal Satpathi90% (10)
- Fundamentals of Automotive Electricity & ElectronicsDocumento81 pagineFundamentals of Automotive Electricity & ElectronicsJohnny YmNessuna valutazione finora
- Economic Design of Sleeve Rotor InductioDocumento10 pagineEconomic Design of Sleeve Rotor InductioIraqi stormNessuna valutazione finora
- A Design Method For Cage Induction Motors With Non-Skewed Rotor BarsDocumento2 pagineA Design Method For Cage Induction Motors With Non-Skewed Rotor BarsLava KumarNessuna valutazione finora
- 1 Calculul Parametrilor PM U PDFDocumento11 pagine1 Calculul Parametrilor PM U PDFAnonymous vJbt0ARNessuna valutazione finora
- 1WCE2009 pp435-440Documento6 pagine1WCE2009 pp435-440Noureddine BounaslaNessuna valutazione finora
- G Owacz - V13i2 - 6mathematical Model of DC Motor For Analysis of Commutation ProcesseDocumento4 pagineG Owacz - V13i2 - 6mathematical Model of DC Motor For Analysis of Commutation ProcesseDante GuajardoNessuna valutazione finora
- Extreme Possibilities of Circuital Models of Electric MachinesDocumento10 pagineExtreme Possibilities of Circuital Models of Electric Machinesmherold2Nessuna valutazione finora
- 001 Bien KowskiDocumento5 pagine001 Bien KowskikarnatisharathNessuna valutazione finora
- Submersible Induction Motor Design OptimizationDocumento42 pagineSubmersible Induction Motor Design OptimizationBhargav SuvagiyaNessuna valutazione finora
- Progress in Electromagnetics Research M, Vol. 8, 163-180, 2009Documento18 pagineProgress in Electromagnetics Research M, Vol. 8, 163-180, 2009Carlos NúñezNessuna valutazione finora
- Applied ElectromagneticsDocumento269 pagineApplied ElectromagneticsNur Amiera SyuhadhaNessuna valutazione finora
- Vibration Calculations in A Electric MotorDocumento14 pagineVibration Calculations in A Electric MotorSantiago MolinaNessuna valutazione finora
- Pebn009 Sizing of Electrical Machines PDFDocumento2 paginePebn009 Sizing of Electrical Machines PDFvishiwizardNessuna valutazione finora
- Modeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of MostDocumento10 pagineModeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of Mostseshubabu_999Nessuna valutazione finora
- Practical Induction 01Documento5 paginePractical Induction 01sathishNessuna valutazione finora
- Design Methodology of A Permanent MagnetDocumento10 pagineDesign Methodology of A Permanent MagnetJian ZhangNessuna valutazione finora
- Analysis of Brushless Three-Phase Synchronous Generator Without ExciterDocumento10 pagineAnalysis of Brushless Three-Phase Synchronous Generator Without ExciterJuan Andres Rojas SerranoNessuna valutazione finora
- Mathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate FrameDocumento11 pagineMathematical Driving Model of Three Phase Induction Motors in Stationary Coordinate Framegodspower brunoNessuna valutazione finora
- Improved Design For Reduction of Torque Ripple of Brushless DC MotorDocumento4 pagineImproved Design For Reduction of Torque Ripple of Brushless DC MotorPhạm Văn TưởngNessuna valutazione finora
- Ems FNLXM A99 ADocumento13 pagineEms FNLXM A99 AdalbaasNessuna valutazione finora
- Instantaneous Magnetic Field Distribution in Brushless Permanent Magnet DC Motors, Part 111: Effect of Stator SlottingDocumento9 pagineInstantaneous Magnetic Field Distribution in Brushless Permanent Magnet DC Motors, Part 111: Effect of Stator SlottingjececioNessuna valutazione finora
- Development of Axial Flux HTS Induction Motors: International Meeting of Electrical Engineering Research ENIINVIE-2012Documento10 pagineDevelopment of Axial Flux HTS Induction Motors: International Meeting of Electrical Engineering Research ENIINVIE-2012Nilton Ramos EstebanNessuna valutazione finora
- Simulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab MethodsDocumento4 pagineSimulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab Methodsபொன்னியின் செல்வன்Nessuna valutazione finora
- The Analytical Approaches To Calculation of Electric Machines On The Basis of The Annular Domains Boundary Problems Solution by The Method of Fourier Variables SeparationDocumento38 pagineThe Analytical Approaches To Calculation of Electric Machines On The Basis of The Annular Domains Boundary Problems Solution by The Method of Fourier Variables Separationni60Nessuna valutazione finora
- Inductances LD LQ Reluctance: The and MachinesDocumento7 pagineInductances LD LQ Reluctance: The and MachinesHERNAN ALONSO BRAVO URREANessuna valutazione finora
- DC MachineDocumento33 pagineDC MachineJevon WilsonNessuna valutazione finora
- Brushless Permanent Magnet Motor DesignDocumento12 pagineBrushless Permanent Magnet Motor DesignAbi PutraNessuna valutazione finora
- Analysis of Axial Flux MotorDocumento4 pagineAnalysis of Axial Flux MotorAvi GuptaNessuna valutazione finora
- Torque Production in Permanent-MagnetDocumento6 pagineTorque Production in Permanent-MagnetTien Dung TranNessuna valutazione finora
- Geometrija UMDocumento7 pagineGeometrija UMMarina StevanovicNessuna valutazione finora
- Exam 11Documento9 pagineExam 11Bakkari MehdiNessuna valutazione finora
- Traditional Design of Cage Rotor Induction MotorsDocumento35 pagineTraditional Design of Cage Rotor Induction MotorsMohammad Gulam AhamadNessuna valutazione finora
- Design and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsDocumento12 pagineDesign and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsNicholas ValdezNessuna valutazione finora
- Dynamic Modeling of PMSMDocumento10 pagineDynamic Modeling of PMSMHisham Magdi El DeebNessuna valutazione finora
- Modeling and Parameter Identification of A Double-Star Induction MachinesDocumento7 pagineModeling and Parameter Identification of A Double-Star Induction MachineshaimantiNessuna valutazione finora
- 3D MSC/EMAS Simulation of A Three Phase Power Transformer by Means of Anisotropic Material PropertiesDocumento11 pagine3D MSC/EMAS Simulation of A Three Phase Power Transformer by Means of Anisotropic Material PropertiesConstantin DorinelNessuna valutazione finora
- 7 TransformadorDocumento27 pagine7 TransformadorMarkovic Ávila MartínezNessuna valutazione finora
- A Comparison of Torque Capabilities of Axial Flux and Radial Flux Type of Brushless DC BLDC Drives For Wide Speed Range ApplicationsDocumento6 pagineA Comparison of Torque Capabilities of Axial Flux and Radial Flux Type of Brushless DC BLDC Drives For Wide Speed Range ApplicationssosiNessuna valutazione finora
- Constructional Details:: 1. Explain The Construction Details of Synchronous MotorDocumento28 pagineConstructional Details:: 1. Explain The Construction Details of Synchronous MotorrioNessuna valutazione finora
- Matrix Analysis Techniques in Cage Induction Machines: David G. DorrellDocumento7 pagineMatrix Analysis Techniques in Cage Induction Machines: David G. Dorrellni60Nessuna valutazione finora
- An Engineering Approach in Modeling Lightning Effects On Megawatt-Class Onshore Wind Turbines Using EMTP and ModelsDocumento5 pagineAn Engineering Approach in Modeling Lightning Effects On Megawatt-Class Onshore Wind Turbines Using EMTP and ModelsYume YumeNessuna valutazione finora
- Exam Electrical Machines and Drives (ET4117) : Grid Back EMF Time (S)Documento10 pagineExam Electrical Machines and Drives (ET4117) : Grid Back EMF Time (S)chidoNessuna valutazione finora
- Determining Rotor Leakage ReactanceDocumento5 pagineDetermining Rotor Leakage ReactanceGaspar RodríguezNessuna valutazione finora
- Calculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsDocumento8 pagineCalculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsWalter SantiNessuna valutazione finora
- Design OptimisationDocumento14 pagineDesign OptimisationAbirami RajagopalNessuna valutazione finora
- IM - Motors To GensDocumento4 pagineIM - Motors To Gensmenilanjan89nLNessuna valutazione finora
- Prediction of Noise Generated by Electromagnetic Forces in Induction MotorsDocumento5 paginePrediction of Noise Generated by Electromagnetic Forces in Induction Motors434lapNessuna valutazione finora
- Design and Simulation of Field Oriented Control of VSI Fed Induction Motor DriveDocumento10 pagineDesign and Simulation of Field Oriented Control of VSI Fed Induction Motor Drivesuhail ahmadNessuna valutazione finora
- Switched Reluctance MotorDocumento52 pagineSwitched Reluctance MotorChandru PrasathNessuna valutazione finora
- Arindam Seminar 11Documento6 pagineArindam Seminar 11Arindam BhattacharjeeNessuna valutazione finora
- Auxiliary Windings, Supplying The AVR of A Brushless Synchronous Generator 2005Documento5 pagineAuxiliary Windings, Supplying The AVR of A Brushless Synchronous Generator 2005Jalil EmadiNessuna valutazione finora
- 02-1 Synchronous MachinesDocumento48 pagine02-1 Synchronous MachinesvenikiranNessuna valutazione finora
- FEM of Induction MotorDocumento6 pagineFEM of Induction MotoromokhafeNessuna valutazione finora
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocumento5 pagineSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNessuna valutazione finora
- Differential Forms on Electromagnetic NetworksDa EverandDifferential Forms on Electromagnetic NetworksValutazione: 4 su 5 stelle4/5 (1)
- Organic Light-Emitting Transistors: Towards the Next Generation Display TechnologyDa EverandOrganic Light-Emitting Transistors: Towards the Next Generation Display TechnologyNessuna valutazione finora
- Characteristic Modes: Theory and Applications in Antenna EngineeringDa EverandCharacteristic Modes: Theory and Applications in Antenna EngineeringNessuna valutazione finora
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- Resistivity Modeling: Propagation, Laterolog and Micro-Pad AnalysisDa EverandResistivity Modeling: Propagation, Laterolog and Micro-Pad AnalysisNessuna valutazione finora
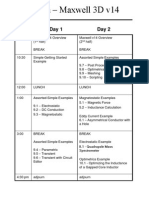
- 852 3D AgendaDocumento1 pagina852 3D AgendavishiwizardNessuna valutazione finora
- ACM2 TAU Datasheet enDocumento5 pagineACM2 TAU Datasheet envishiwizardNessuna valutazione finora
- FAB Resistivity White PaperDocumento8 pagineFAB Resistivity White PapervishiwizardNessuna valutazione finora
- BLDC DesignDocumento13 pagineBLDC DesignvishiwizardNessuna valutazione finora
- Big Energy Series 11.5.2012 Qing-Chang ZhongDocumento1 paginaBig Energy Series 11.5.2012 Qing-Chang ZhongvishiwizardNessuna valutazione finora
- Sensors Used in HEVDocumento4 pagineSensors Used in HEVvishiwizard100% (1)
- Insulating Varnish OverviewDocumento2 pagineInsulating Varnish OverviewvishiwizardNessuna valutazione finora
- How To Check A MOSFET Using A Digital Multimeter - Homemade Circuit Designs Just For YouDocumento2 pagineHow To Check A MOSFET Using A Digital Multimeter - Homemade Circuit Designs Just For YouvishiwizardNessuna valutazione finora
- FTF Aut f0234Documento38 pagineFTF Aut f0234vishiwizardNessuna valutazione finora
- Wittich2011 SonkusaleVanderveldeDocumento1 paginaWittich2011 SonkusaleVanderveldevishiwizardNessuna valutazione finora
- A Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesDocumento1 paginaA Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesvishiwizardNessuna valutazione finora
- Motor Primer1Documento2 pagineMotor Primer1vishiwizardNessuna valutazione finora
- E3632 SerDocumento128 pagineE3632 ServishiwizardNessuna valutazione finora
- Orcad 16 Full - NotepadDocumento2 pagineOrcad 16 Full - NotepadvishiwizardNessuna valutazione finora
- Sona SPEED CatalogueDocumento13 pagineSona SPEED CataloguevishiwizardNessuna valutazione finora
- Wimd32 ParamsDocumento86 pagineWimd32 ParamsvishiwizardNessuna valutazione finora
- Chapter 6. Energy Use CharacterizationDocumento10 pagineChapter 6. Energy Use CharacterizationvishiwizardNessuna valutazione finora
- Selco T Line WebDocumento8 pagineSelco T Line WebMurali SubramaniNessuna valutazione finora
- Mixed Signal Circuit Design ELL 731Documento11 pagineMixed Signal Circuit Design ELL 731Anmol SinhaNessuna valutazione finora
- SCR DatasheetDocumento9 pagineSCR DatasheetSarah DuranNessuna valutazione finora
- Transport ADRDocumento3 pagineTransport ADRZbinca CristianNessuna valutazione finora
- 2) Electromotive Force (Emf)Documento2 pagine2) Electromotive Force (Emf)ZIdanNessuna valutazione finora
- DIGI Keypad - 21Documento15 pagineDIGI Keypad - 21Mahmoud Rob100% (1)
- Standalone Access Control: Packing List WiringDocumento1 paginaStandalone Access Control: Packing List WiringAmine AminouNessuna valutazione finora
- Pakistan Cables Price ListDocumento2 paginePakistan Cables Price ListMudasarS90% (10)
- 7.4 Main Spindle Control With Analog Interface 6SN1121-0BA1!-0AA!Documento7 pagine7.4 Main Spindle Control With Analog Interface 6SN1121-0BA1!-0AA!Edinson ZamoraNessuna valutazione finora
- Advantages & Limitations of Different Energy Storage Systems Electricalvoice 2Documento1 paginaAdvantages & Limitations of Different Energy Storage Systems Electricalvoice 2Slaven IvanovicNessuna valutazione finora
- Efire TCP PsDocumento2 pagineEfire TCP PsAshutoshSharmaNessuna valutazione finora
- Electric Pressure Cookers Training ManualDocumento25 pagineElectric Pressure Cookers Training ManualLa perrritaaaNessuna valutazione finora
- Marshall Class 5 Owner ManualDocumento4 pagineMarshall Class 5 Owner ManualJuan Cruz LeónNessuna valutazione finora
- Installer Pack v3 2Documento50 pagineInstaller Pack v3 2Chris JefferyNessuna valutazione finora
- RRU5301 Technical Specifications: Supported Modes and Frequency BandsDocumento7 pagineRRU5301 Technical Specifications: Supported Modes and Frequency BandsMARCSTARSNessuna valutazione finora
- Iec60598 1 I1 (Ed8.0) BDocumento4 pagineIec60598 1 I1 (Ed8.0) BAnooshdini2002Nessuna valutazione finora
- IEC 60060-2 - High-Voltage Test Techniques - Part 2: Measuring Systems - Edition 3.0Documento19 pagineIEC 60060-2 - High-Voltage Test Techniques - Part 2: Measuring Systems - Edition 3.0ONUR YILMAZNessuna valutazione finora
- Fiat RNS3 Users ManualDocumento8 pagineFiat RNS3 Users ManualMilan ProticNessuna valutazione finora
- 2 V Amp 2nd e Manual ADocumento232 pagine2 V Amp 2nd e Manual Aroymathew2003Nessuna valutazione finora
- Manual Avr Leroy Somer Mod. R 181 - enDocumento8 pagineManual Avr Leroy Somer Mod. R 181 - enMiguel Angel Pavon CarbonellNessuna valutazione finora
- Displays: Specifications FOR LCD Module CGM12864Documento8 pagineDisplays: Specifications FOR LCD Module CGM12864Diego AzevedoNessuna valutazione finora
- 1º Manual Retroescavadeira 416E Julho 2007 (295 345)Documento51 pagine1º Manual Retroescavadeira 416E Julho 2007 (295 345)Cristian SpositoNessuna valutazione finora
- Design StandardDocumento47 pagineDesign StandardWajeeh BitarNessuna valutazione finora
- Engine Electric StstemDocumento51 pagineEngine Electric StstemnahomNessuna valutazione finora
- Power Systems Lab 1.revisedDocumento38 paginePower Systems Lab 1.revisedJerrord ThomasNessuna valutazione finora
- 4 Adc/8 Dac With PLL, 192 KHZ, 24-Bit Codec: Data SheetDocumento33 pagine4 Adc/8 Dac With PLL, 192 KHZ, 24-Bit Codec: Data SheetLAI YEEK HRVENessuna valutazione finora