Potrebbero piacerti anche
- Virtual Lab User's ManualDocumento24 pagineVirtual Lab User's ManualSourav KarthickNessuna valutazione finora
- CISA Exam-Testing Concept-Testing in SDLC (Domain-3)Da EverandCISA Exam-Testing Concept-Testing in SDLC (Domain-3)Nessuna valutazione finora
- Lab 2.6.5.1 ACU Utilities: ObjectiveDocumento7 pagineLab 2.6.5.1 ACU Utilities: Objective2613078Nessuna valutazione finora
- EPANET Water Modeling SoftwareDocumento191 pagineEPANET Water Modeling SoftwareJosif KaevskiNessuna valutazione finora
- Process System Value and Exergoeconomic Performance of Captive Power PlantsDa EverandProcess System Value and Exergoeconomic Performance of Captive Power PlantsNessuna valutazione finora
- Objectives and ScopeDocumento8 pagineObjectives and Scopedewang goelNessuna valutazione finora
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosDa EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosValutazione: 5 su 5 stelle5/5 (1)
- LabVIEW TM Core 2 Course Manual-11-20Documento10 pagineLabVIEW TM Core 2 Course Manual-11-20陳彥勳Nessuna valutazione finora
- On-Line Condition Monitoring Systems For High Voltage Circuit Breakers A Collaborative Research Project 1997 - 2001Documento7 pagineOn-Line Condition Monitoring Systems For High Voltage Circuit Breakers A Collaborative Research Project 1997 - 2001Ed ArenasNessuna valutazione finora
- Gauss UserDocumento23 pagineGauss Userapi-3831923Nessuna valutazione finora
- (IV) Water Level Control SystemDocumento9 pagine(IV) Water Level Control Systemnasamohd17Nessuna valutazione finora
- E5 Vanilla Sakai Test Plan v1 1Documento18 pagineE5 Vanilla Sakai Test Plan v1 1hporeddyNessuna valutazione finora
- LAB # 2: Intro To LABVIEW: Texas A&M University MEEN 260-Section # 510 09/25/2014Documento11 pagineLAB # 2: Intro To LABVIEW: Texas A&M University MEEN 260-Section # 510 09/25/2014pam2273Nessuna valutazione finora
- Final Document Senior DesignDocumento20 pagineFinal Document Senior Designapi-238193183Nessuna valutazione finora
- Objectives and ScopeDocumento8 pagineObjectives and Scopedewang goelNessuna valutazione finora
- Computer Aided Transient Stability AnalysisDocumento5 pagineComputer Aided Transient Stability AnalysisViresh PatelNessuna valutazione finora
- Data Link - Test: C9.3 Marine Auxiliary and Generator Set EngineDocumento7 pagineData Link - Test: C9.3 Marine Auxiliary and Generator Set EnginebejoythomasNessuna valutazione finora
- Objectives and ScopeDocumento9 pagineObjectives and Scopedewang goelNessuna valutazione finora
- Real Time Systems Lab: Handling Shared ResourcesDocumento14 pagineReal Time Systems Lab: Handling Shared ResourcesJ robertsNessuna valutazione finora
- EE130P Lab2 - Measure Dielectric Constants of LiquidsDocumento9 pagineEE130P Lab2 - Measure Dielectric Constants of LiquidsCat ABCDENessuna valutazione finora
- SWE2022 Software Engineering Process, Tools and Methods Review 3 Weather ForecastingDocumento30 pagineSWE2022 Software Engineering Process, Tools and Methods Review 3 Weather ForecastingVenna VamsikrishnaNessuna valutazione finora
- Virtual Lab 7 - Martian RescueDocumento4 pagineVirtual Lab 7 - Martian RescueAhmed HamoudaNessuna valutazione finora
- Real Time Systems Lab: Managing A Schedule With A Remote DeviceDocumento14 pagineReal Time Systems Lab: Managing A Schedule With A Remote DeviceJ robertsNessuna valutazione finora
- Adv Trans NuclearDocumento33 pagineAdv Trans NuclearJose Alberto RodriguezNessuna valutazione finora
- Supervision and Diagnosis of EIB/KNX DevicesDocumento10 pagineSupervision and Diagnosis of EIB/KNX Devicesbxlmichael8837Nessuna valutazione finora
- MAN-096-0002 A - Patroller II Firmware Upgrade GuideDocumento17 pagineMAN-096-0002 A - Patroller II Firmware Upgrade GuideDejan RomićNessuna valutazione finora
- Dust VueDocumento25 pagineDust Vuenilambar.mahalaNessuna valutazione finora
- Lab 1: Evaluating Internet Connection Choices For A Small Home PC NetworkDocumento10 pagineLab 1: Evaluating Internet Connection Choices For A Small Home PC NetworkjanluccasNessuna valutazione finora
- Pipelined Processor DesignDocumento28 paginePipelined Processor DesignLihau TanNessuna valutazione finora
- Application of LabView Vision and Fuzzy Control For Controling A Gantry CraneDocumento4 pagineApplication of LabView Vision and Fuzzy Control For Controling A Gantry CraneJournalofICTNessuna valutazione finora
- NI Tutorial 4604Documento12 pagineNI Tutorial 4604bamanjunathaNessuna valutazione finora
- Design and Development of Labview Based Environmental Test Chamber ControllerDocumento4 pagineDesign and Development of Labview Based Environmental Test Chamber Controllerbharathraddi basavaradderNessuna valutazione finora
- Answer:: Chapter 6: Architectural DesignDocumento6 pagineAnswer:: Chapter 6: Architectural DesigncharlesNessuna valutazione finora
- Networks Lab ManualDocumento53 pagineNetworks Lab ManualM'atto DipnotNessuna valutazione finora
- Numerical Analysis: Lab No.01Documento21 pagineNumerical Analysis: Lab No.01Abdullah ArifNessuna valutazione finora
- Security Probe ManualDocumento69 pagineSecurity Probe ManualmoestbgNessuna valutazione finora
- ECNG 3016 Advanced Digital Electronics: Eneral NformationDocumento25 pagineECNG 3016 Advanced Digital Electronics: Eneral NformationMarlon BoucaudNessuna valutazione finora
- RFC2544 Ethernet testing proceduresDocumento4 pagineRFC2544 Ethernet testing proceduresJulioCarloFajardoNessuna valutazione finora
- ECCE221 - Lab0 - Installation and Introduction To MULTISIMDocumento20 pagineECCE221 - Lab0 - Installation and Introduction To MULTISIMsultanNessuna valutazione finora
- Elec 321 - 3Documento6 pagineElec 321 - 3Nur Alam ChowdhuryNessuna valutazione finora
- OPNET Lab Two - Switches vs. Hubs: EE440 Dr. Jane DongDocumento7 pagineOPNET Lab Two - Switches vs. Hubs: EE440 Dr. Jane DongPoonam SinghNessuna valutazione finora
- Manual Cpe006Documento57 pagineManual Cpe006ALlan ABiangNessuna valutazione finora
- BOILER CONTROLLER USING LABVIEWDocumento32 pagineBOILER CONTROLLER USING LABVIEWSATHISH KUMAR SNessuna valutazione finora
- ProposalDocumento8 pagineProposalgetasew muluyeNessuna valutazione finora
- CN Lab ManualDocumento45 pagineCN Lab ManualHanumanthu Mothukuru100% (1)
- Operating System Concepts Assignment Submitted to Sir Dr. Adnan AhmadDocumento12 pagineOperating System Concepts Assignment Submitted to Sir Dr. Adnan AhmadAbdul Rehman ZafarNessuna valutazione finora
- System Hardware SOEN228Documento5 pagineSystem Hardware SOEN228Hichem SehabiNessuna valutazione finora
- Chapter OneDocumento46 pagineChapter OneothmanNessuna valutazione finora
- Cable Tester Installation Application: Download Setup (Below)Documento3 pagineCable Tester Installation Application: Download Setup (Below)ibrahem mohsenNessuna valutazione finora
- Sample Chapter-3Documento10 pagineSample Chapter-3Marvin CincoNessuna valutazione finora
- Application Guide: ACAN-04 Rev A 03/2003Documento12 pagineApplication Guide: ACAN-04 Rev A 03/2003ayoubNessuna valutazione finora
- NotepadDocumento6 pagineNotepadAnkit KomarNessuna valutazione finora
- Transmission Control ProtocolDocumento11 pagineTransmission Control ProtocolabdulimpNessuna valutazione finora
- WRC STOAT: Tutorials GuideDocumento80 pagineWRC STOAT: Tutorials GuideAoife Fitzgerald100% (1)
- WaterGems PlanDocumento5 pagineWaterGems PlanEdNessuna valutazione finora
- Lab 11 Hannan Mazin WajahatDocumento8 pagineLab 11 Hannan Mazin WajahatHannan AamirNessuna valutazione finora
- Functional Safety Management Aspects in Testing of Automotive Safety Concern SystemsDocumento4 pagineFunctional Safety Management Aspects in Testing of Automotive Safety Concern SystemssnehanagendraNessuna valutazione finora
- Manhunt eDocumento2 pagineManhunt eariovaldojrNessuna valutazione finora
- ManhuntDocumento3 pagineManhuntariovaldojrNessuna valutazione finora
- MDWpo E PDFDocumento27 pagineMDWpo E PDFariovaldojrNessuna valutazione finora
- NTNDocumento511 pagineNTNFerKuaSNessuna valutazione finora
- Intel I7Documento5 pagineIntel I7ariovaldojrNessuna valutazione finora
- Checklist for manufacturing blueprint part numbersDocumento1 paginaChecklist for manufacturing blueprint part numbersariovaldojrNessuna valutazione finora
- Eula Microsoft Visual StudioDocumento3 pagineEula Microsoft Visual StudioqwwerttyyNessuna valutazione finora
- TRMPDocumento4 pagineTRMPariovaldojrNessuna valutazione finora
- Solid Edge API Tcm78-125829Documento195 pagineSolid Edge API Tcm78-125829Anonymous z4Fe39jNessuna valutazione finora
- Ti Article JIS PDFDocumento7 pagineTi Article JIS PDFariovaldojrNessuna valutazione finora
- ShortDocumento1 paginaShortariovaldojrNessuna valutazione finora
- CA3000A Dodge BearingDocumento708 pagineCA3000A Dodge BearingSuphi YükselNessuna valutazione finora
- Part 3 - 4 Multiplexing (Compatibility Mode) PDFDocumento31 paginePart 3 - 4 Multiplexing (Compatibility Mode) PDFariovaldojrNessuna valutazione finora
- Maurice Nicoll The Mark PDFDocumento4 pagineMaurice Nicoll The Mark PDFErwin KroonNessuna valutazione finora
- DAC CountriesDocumento1 paginaDAC Countriessathish10001984Nessuna valutazione finora
- SQL Aula 20110921Documento97 pagineSQL Aula 20110921ariovaldojrNessuna valutazione finora
- Chapter 06-Multiplexing PDFDocumento32 pagineChapter 06-Multiplexing PDFariovaldojrNessuna valutazione finora
- Chapter 6 - References - FinalDocumento7 pagineChapter 6 - References - FinalariovaldojrNessuna valutazione finora
- Chapters 1 and 2 - Revised FinalDocumento25 pagineChapters 1 and 2 - Revised FinalariovaldojrNessuna valutazione finora
- Chapter 3 - Methodology - Revisado FinalDocumento15 pagineChapter 3 - Methodology - Revisado FinalariovaldojrNessuna valutazione finora
- RadixsortDocumento3 pagineRadixsortariovaldojrNessuna valutazione finora
- Chapter 5Documento4 pagineChapter 5ariovaldojrNessuna valutazione finora
- 2500 Installation GuideDocumento81 pagine2500 Installation GuideariovaldojrNessuna valutazione finora
- FisherLabs tw6 PDFDocumento24 pagineFisherLabs tw6 PDFJorge B. Briceño GomezNessuna valutazione finora
- 08082014104446philips HTL2163B ManualDocumento18 pagine08082014104446philips HTL2163B ManualMI Kol EuanNessuna valutazione finora
- Richcomm BMS Installation & ConfigurationDocumento18 pagineRichcomm BMS Installation & ConfigurationSatrio Ongis NadeNessuna valutazione finora
- PS5 Power Supply Battery ChargerDocumento2 paginePS5 Power Supply Battery ChargerWERMERMNessuna valutazione finora
- VRLA Rechargeable Battery Features, Specs and ApplicationsDocumento1 paginaVRLA Rechargeable Battery Features, Specs and ApplicationsElvis DiazNessuna valutazione finora
- Solaw Power InstructionDocumento2 pagineSolaw Power InstructiondmugalloyNessuna valutazione finora
- Nicad and Lead Acid BatteriesDocumento2 pagineNicad and Lead Acid BatteriesSukalyan GhoshalNessuna valutazione finora
- Alcad CellDocumento32 pagineAlcad CellIsaac VoonNessuna valutazione finora
- PC1864 v4 (1) (1) .1 Installation ManualDocumento16 paginePC1864 v4 (1) (1) .1 Installation ManualEric MoodyNessuna valutazione finora
- Lsi GCXXX Load Cells DatasheetDocumento8 pagineLsi GCXXX Load Cells Datasheetdeathh6584Nessuna valutazione finora
- CME Infusion Pump Service ManualDocumento50 pagineCME Infusion Pump Service ManualanayencyramosNessuna valutazione finora
- Some Fiber Optic Measurement ProceduresDocumento6 pagineSome Fiber Optic Measurement ProceduresAmir SalahNessuna valutazione finora
- Essential components and working of UPS systemDocumento22 pagineEssential components and working of UPS systemroshani007Nessuna valutazione finora
- Pramac Group's Power Engineering Division and Product RangeDocumento27 paginePramac Group's Power Engineering Division and Product Range07939312Nessuna valutazione finora
- Lithium Ion Final Report (Sealed)Documento11 pagineLithium Ion Final Report (Sealed)Gkn KarthikeyanNessuna valutazione finora
- EMERGENCY LIGHTING General Test Procedure: 1. Inspect The Battery Unit For Any Signs of Physical DamageDocumento2 pagineEMERGENCY LIGHTING General Test Procedure: 1. Inspect The Battery Unit For Any Signs of Physical DamageSaleem JavedNessuna valutazione finora
- SOLLATEK Kenya Pricelist 01 07 2014Documento17 pagineSOLLATEK Kenya Pricelist 01 07 2014Washington Anjichi Okang'a0% (1)
- Engineering Director R&D Products in United States Resume Micha EizenDocumento2 pagineEngineering Director R&D Products in United States Resume Micha EizenMichaEizenNessuna valutazione finora
- C15 & C18 EnginesDocumento118 pagineC15 & C18 Enginesdocumentossaf78% (18)
- 2015-16 Mcet Cse Stu Handout Version 1Documento103 pagine2015-16 Mcet Cse Stu Handout Version 1razaraviNessuna valutazione finora
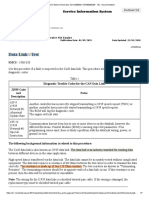
- 01-356 ESP DTC Table PDFDocumento96 pagine01-356 ESP DTC Table PDFmefisto06cNessuna valutazione finora
- Winco wg270 WLDR Gen Opm PDFDocumento17 pagineWinco wg270 WLDR Gen Opm PDFMarvinNessuna valutazione finora
- Manual MS-5024UD Control Alarma IncendioDocumento92 pagineManual MS-5024UD Control Alarma IncendiokasakovichNessuna valutazione finora
- Set up FrSky Smart Port Lipo Voltage SensorDocumento1 paginaSet up FrSky Smart Port Lipo Voltage SensorCheryl Laura LamamNessuna valutazione finora
- BridgestoneDocumento50 pagineBridgestonedavid_harris_14Nessuna valutazione finora
- SP r5200Documento103 pagineSP r5200lada1119Nessuna valutazione finora
- Modular Range VRLA: Innovative FeaturesDocumento2 pagineModular Range VRLA: Innovative Featuresraulneti1984Nessuna valutazione finora
- Power Supply and Battery Charger Circuit Encyclopedia (2003)Documento48 paginePower Supply and Battery Charger Circuit Encyclopedia (2003)ilroux100% (1)
- SPM11Documento26 pagineSPM11Narcis PatrascuNessuna valutazione finora
- BondMaster1000eplus enDocumento2 pagineBondMaster1000eplus enKuKu FunNessuna valutazione finora
- Asset Integrity Management for Offshore and Onshore StructuresDa EverandAsset Integrity Management for Offshore and Onshore StructuresNessuna valutazione finora
- Industrial Piping and Equipment Estimating ManualDa EverandIndustrial Piping and Equipment Estimating ManualValutazione: 5 su 5 stelle5/5 (7)
- Machine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesDa EverandMachine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesPatrick BangertValutazione: 3 su 5 stelle3/5 (2)
- Hydraulic Fracturing in Unconventional Reservoirs: Theories, Operations, and Economic AnalysisDa EverandHydraulic Fracturing in Unconventional Reservoirs: Theories, Operations, and Economic AnalysisNessuna valutazione finora
- Machinery Lubrication Technician (MLT) I and II Certification Exam GuideDa EverandMachinery Lubrication Technician (MLT) I and II Certification Exam GuideValutazione: 2 su 5 stelle2/5 (1)
- Pocket Guide to Flanges, Fittings, and Piping DataDa EverandPocket Guide to Flanges, Fittings, and Piping DataValutazione: 3.5 su 5 stelle3.5/5 (22)
- Flow Analysis for Hydrocarbon Pipeline EngineeringDa EverandFlow Analysis for Hydrocarbon Pipeline EngineeringNessuna valutazione finora
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionDa EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionValutazione: 4.5 su 5 stelle4.5/5 (16)
- Pipeline Integrity: Management and Risk EvaluationDa EverandPipeline Integrity: Management and Risk EvaluationValutazione: 4.5 su 5 stelle4.5/5 (6)
- Well Control for Completions and InterventionsDa EverandWell Control for Completions and InterventionsValutazione: 4 su 5 stelle4/5 (10)
- Biostratigraphic and Geological Significance of Planktonic ForaminiferaDa EverandBiostratigraphic and Geological Significance of Planktonic ForaminiferaValutazione: 4 su 5 stelle4/5 (5)
- Practical Reservoir Engineering and CharacterizationDa EverandPractical Reservoir Engineering and CharacterizationValutazione: 4.5 su 5 stelle4.5/5 (3)
- Practical Wellbore Hydraulics and Hole Cleaning: Unlock Faster, more Efficient, and Trouble-Free Drilling OperationsDa EverandPractical Wellbore Hydraulics and Hole Cleaning: Unlock Faster, more Efficient, and Trouble-Free Drilling OperationsValutazione: 5 su 5 stelle5/5 (1)
- Experimental Design in Petroleum Reservoir StudiesDa EverandExperimental Design in Petroleum Reservoir StudiesNessuna valutazione finora
- Black Gold Stranglehold: The Myth of Scarcity and the Politics of OilDa EverandBlack Gold Stranglehold: The Myth of Scarcity and the Politics of OilNessuna valutazione finora
- Deepwater Drilling: Well Planning, Design, Engineering, Operations, and Technology ApplicationDa EverandDeepwater Drilling: Well Planning, Design, Engineering, Operations, and Technology ApplicationValutazione: 4.5 su 5 stelle4.5/5 (2)
- Internal Combustion: How Corporations and Governments Addicted the World to Oil and Subverted the AlternativesDa EverandInternal Combustion: How Corporations and Governments Addicted the World to Oil and Subverted the AlternativesValutazione: 4 su 5 stelle4/5 (2)
- Oil & Gas Design Engineering Guide Book: Useful Practices and Equipment & SystemsDa EverandOil & Gas Design Engineering Guide Book: Useful Practices and Equipment & SystemsNessuna valutazione finora
- Asphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsDa EverandAsphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsNessuna valutazione finora
- Risk Management in the Oil and Gas Industry: Offshore and Onshore Concepts and Case StudiesDa EverandRisk Management in the Oil and Gas Industry: Offshore and Onshore Concepts and Case StudiesNessuna valutazione finora
- Prevention of Valve Fugitive Emissions in the Oil and Gas IndustryDa EverandPrevention of Valve Fugitive Emissions in the Oil and Gas IndustryNessuna valutazione finora