Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Unidad 02
Caricato da
Fiorella Luque MendietaTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Unidad 02
Caricato da
Fiorella Luque MendietaCopyright:
Formati disponibili
UNIVERSIDAD NACIONAL DE SAN CRISTBAL DE HUAMANGA
ESCUELA DE FORMACIN PROFESIONAL DE INGENIERA DE SISTEMAS
CONTROL Y AUTOMATIZACIN DE PROCESOS
UNIDAD N 02 AUTMATAS PROGRAMABLES
Ing. Christian Lezama Cuellar
PLC
Estructura Externa
- Estructura compacta - Estructura semimodular - Estructura modular - CPU - Fuente de Alimentacin - Interface - Unidad de Programacin - Entrada y Salida - Memoria
Estructura
AUTMATAS PROGRAMABLE
PLC
Estructura Interna
Funcionamiento
- Modo de funcionamiento - Ciclo de funcionamiento - Tiempo de ejecucin y control en tiempo real
INTRODUCCIN
Un autmata programable industrial (API) o Programable Logic Controller (PLC), es un equipo electrnico, programable en lenguaje no informtico, diseado para controlar en tiempo real y en ambiente de tipo industrial, procesos secuenciales. Un PLC trabaja en base a la informacin recibida por los captadores y el programa lgico interno, actuando sobre los accionadores de la instalacin.
Campos de aplicacin
El PLC por sus especiales caractersticas de diseo tiene un campo de aplicacin muy extenso. La constante evolucin del hardware y software ampla constantemente este campo para poder satisfacer las necesidades que se detectan en el espectro de sus posibilidades reales. Su utilizacin se da fundamentalmente en aquellas instalaciones en donde es necesario un proceso de maniobra, control, sealizacin, etc. , por tanto, su aplicacin abarca desde procesos de fabricacin industriales de cualquier tipo a transformaciones industriales, control de instalaciones, etc.
Campos de aplicacin
Sus reducidas dimensiones, la extremada facilidad de su montaje, la posibilidad de almacenar los programas para su posterior y rpida utilizacin, la modificacin o alteracin de los mismos, etc., hace que su eficacia se aprecie fundamentalmente en procesos en que se producen necesidades tales como: Espacio reducido Procesos de produccin peridicamente cambiantes. Procesos secuenciales Maquinaria de procesos variable Instalaciones de procesos complejos y amplios Chequeo de programacin centralizada de las partes del proceso
Ejemplos de aplicaciones generales: Maniobra de mquinas Maquinaria industrial de plstico Mquinas transfer Maquinaria de embalajes Maniobra de instalaciones:
Instalacin de aire acondicionado, calefaccin, etc. Instalaciones de seguridad.
Sealizacin y control:
Chequeo de programas. Sealizacin del estado de procesos.
Ventajas e Inconvenientes
No todos los autmatas ofrecen las mismas ventajas sobre la lgica cableada, ello es debido, principalmente, a la variedad de modelos existentes en el mercado y las innovaciones tcnicas que surgen constantemente. Tales consideraciones me obligan e referirme a las ventajas que proporciona un autmata de tipo medio.
Ventajas
Menor tiempo empleado en la elaboracin de proyectos debido a que: No es necesario dibujar el esquema de contactos. No es necesario simplificar las ecuaciones lgicas, ya que, por lo general la capacidad de almacenamiento del mdulo de memoria es lo suficientemente grande. La lista de materiales queda sensiblemente reducida, y al elaborar el presupuesto correspondiente eliminaremos parte del problema que supone el contar con diferentes proveedores, distintos plazos de entrega. Posibilidad de introducir modificaciones sin cambiar el cableado ni aadir aparatos. Mnimo espacio de ocupacin. Menor coste de mano de obra de la instalacin.
10
Ventajas
Economa de mantenimiento. Adems de aumentar la fiabilidad del sistema, al eliminar contactos mviles, los mismos autmatas pueden indicar y detectar averas. Posibilidad de gobernar varias mquinas con un mismo autmata. Menor tiempo para la puesta en funcionamiento del proceso al quedar reducido el tiempo cableado. Menor tiempo para la puesta en funcionamiento del proceso al quedar reducido el tiempo cableado. Si por alguna razn la mquina queda fuera de servicio, el autmata sigue siendo til para otra mquina o sistema de produccin.
11
Inconvenientes
Como inconvenientes podramos hablar, en primer lugar, de que hace falta un programador, lo que obliga a adiestrar a uno de los tcnicos en tal sentido, pero hoy en da ese inconveniente esta solucionado porque las universidades ya se encargan de dicho adiestramiento. El coste inicial tambin puede ser un inconveniente.
12
Funciones bsicas de un PLC
Deteccin: Lectura de la seal de los captadores distribuidos por el sistema de fabricacin. Mando: Elaborar y enviar las acciones al sistema mediante los accionadores y preaccionadores. Dialogo hombre maquina: Mantener un dilogo con los operarios de produccin, obedeciendo sus consignas e informando del estado del proceso. Programacin: Para introducir, elaborar y cambiar el programa de aplicacin del autmata. El dialogo de programacin debe permitir modificar el programa incluso con el autmata controlando la maquina.
13
Nuevas Funciones
Redes de comunicacin: Permiten establecer comunicacin con otras partes de control. Las redes industriales permiten la comunicacin y el intercambio de datos entre autmatas a tiempo real. En unos cuantos milisegundos pueden enviarse telegramas e intercambiar tablas de memoria compartida. Sistemas de supervisin: Tambin los autmatas permiten comunicarse con ordenadores provistos de programas de supervisin industrial. Esta comunicacin se realiza por una red industrial o por medio de una simple conexin por el puerto serie del ordenador.
14
Nuevas Funciones
Control de procesos continuos: Adems de dedicarse al control de sistemas de eventos discretos los autmatas llevan incorporadas funciones que permiten el control de procesos continuos. Disponen de mdulos de entrada y salida analgicas y la posibilidad de ejecutar reguladores PID que estn programados en el autmata. Entradas- Salidas distribuidas: Los mdulos de entrada salida no tienen porqu estar en el armario del autmata. Pueden estar distribuidos por la instalacin, se comunican con la unidad central del autmata mediante un cable de red. Buses de campo: Mediante un solo cable de comunicacin se pueden conectar al bus captadores y accionadores, reemplazando al cableado tradicional. El autmata consulta cclicamente el estado de los captadores y actualiza el estado de los accionadores.
15
ESTRUCTURA
Este captulo est dedicado a conocer al autmata en su parte fsica o hardware, no slo en su configuracin externa, sino tambin y fundamentalmente en la parte interna. El autmata esta compuesto de diferentes elementos como CPU, fuente de alimentacin, memoria, E/S, etc. que estn colocados de diferente forma y modo segn la estructura externa del autmata. En el apartado dedicado a la estructura externa veremos donde y como se colocan los diferentes elementos que componen el autmata programable. En el apartado dedicado a la estructura interna veremos la funcin que desempea cada uno de los diferentes elementos como CPU, E/S, fuente de alimentacin, etc..
16
ESTRUCTURA EXTERNA
El trmino estructura externa o configuracin externa de un autmata programable industrial se refiere al aspecto fsico exterior del mismo, bloques o elementos en que est dividido. Actualmente son tres las estructuras ms significativas que existen en el mercado: Estructura compacta. Estructura semimodular. ( Estructura Americana). Estructura modular. (Estructura Europea)
17
Estructura Compacta
Este tipo de autmatas se distingue por presentar en un solo bloque todos sus elementos, esto es, fuente de alimentacin, CPU, memorias, entradas/salidas, etc..
Son los autmatas de gama baja o nanoautmatas los que suelen tener una estructura compacta. Su potencia de proceso suele ser muy limitada dedicndose a controlar mquinas muy pequeas o cuadros de mando.
18
Estructura Semimodular. ( Estructura Americana).
Se caracteriza por separar las E/S del resto del autmata, de tal forma que en un bloque compacto estn reunidas las CPU, memoria de usuario o de programa y fuente de alimentacin y separadamente las unidades de E/S .
Son los autmatas de gama media los que suelen tener una estructura semimodular (Americana).
19
Estructura modular
Su caracterstica principal es la de que existe un mdulo para cada uno de los diferentes elementos que componen el autmata como puede ser una fuente de alimentacin, CPU, E/S, etc. La sujecin de los mismos se hace por carril DIN, placa perforada o sobre RACK, en donde va alojado el BUS externo de unin de los distintos mdulos que lo componen. Son los autmatas de gama alta los que suelen tener una estructura modular, que permiten una gran flexibilidad en su constitucin.
20
ESTRUCTURA INTERNA
La estructura interna de cada uno de los diferentes elementos que componen el autmata, las funciones y funcionamiento de cada una de ellas. El autmata est constituido por diferentes elementos, pero tres son los bsicos: Entrada CPU Entrada Salida
CPU
Salida
21
Estructura Interna
Con las partes mencionadas podemos decir que tenemos un autmata pero para que sea operativo son necesarios otros elementos tales como: Fuente de alimentacin Fuente de alimentacin Interfaces La unidad o consola de programacin Los dispositivos perifricos.
Dispositivos perifricos.
La unidad o consola de programacin
Interfaces
22
CPU(Central Procesing Unit)
La CPU (Unidad Central de procesamiento) es la parte inteligente del sistema. Interpreta las instrucciones del programa de usuario y consulta el estado de las entradas. Dependiendo de dichos estados y del programa, ordena la activacin de las salidas deseadas. La CPU est constituida por los siguientes elementos: Procesador Memoria monitor del sistema Circuitos auxiliares
23
Procesador
Est constituido por el microprocesador, el reloj(generador de onda cuadrada) y algn chip auxiliar.
El micropocesador es un circuito integrado (chip), que realiza una gran cantidad de operaciones, que podemos agrupar en: Operaciones de tipo lgico. Operaciones de tipo aritmtico. Operaciones de control de la transferencia de la informacin dentro del autmata.
24
Para que el microprocesador pueda realizar todas estas operaciones est dotado de unos circuitos internos que son los siguientes: Circuitos de la unidad aritmtica y lgica o ALU: Es la parte del p donde se realizan los clculos y las decisiones lgicas para controlar el autmata. Circuitos de la unidad de control (UC) o Decodificador de instrucciones: Decodifica las instrucciones ledas en memoria y se generan las seales de control. Acumulador: Es la encargada de almacenar el resultado de la ltima operacin realizada por el ALU. Flags: Flags, o indicadores de resultado, que pueden ser consultados por el programa. Contador de programa: Encargada de la lectura de las instrucciones de usuario. Bus(interno): No son circuitos en si, sino zonas conductoras en paralelo que transmiten datos, direcciones, instrucciones y seales de control entre las diferentes partes del p.
25
Memoria monitor del sistema
Es una memoria de tipo ROM, y adems del sistema operativo del autmata contiene las siguientes rutinas, incluidas por el fabricante. Inicializacin tras puesta en tensin o reset. Rutinas de test y de respuesta a error de funcionamiento. Intercambio de informacin con unidades exteriores. Lectura y escritura en las interfaces de E/S.
26
Funciones bsicas de la CPU
En la memoria ROM del sistema, el fabricante ha grabado una serie de programas ejecutivos, software del sistema y es a estos programas a los que acceder el p para realizar las funciones. El software del sistema de cualquier autmata consta de una serie de funciones bsicas que realiza en determinados tiempos de cada ciclo.
27
Funciones bsicas de la CPU
En general cada autmata contiene y realiza las siguientes funciones: Vigilar que el tiempo de ejecucin del programa de usuario no exceda de un determinado tiempo mximo. A esta funcin se le denomina Watchdog. Ejecutar el programa usuario. Crear una imagen de las entradas, ya que el programa de usuario no debe acceder directamente a dichas entradas. Renovar el estado de las salidas en funcin de la imagen de las mismas, obtenida al final del ciclo de ejecucin del programa usuario. Chequeo del sistema.
28
Fuente de Alimentacin
La fuente de alimentacin proporciona las tensiones necesarias para el funcionamiento de los distintos circuitos del sistema. La alimentacin a la CPU puede ser de continua a 24 Vcc, tensin muy frecuente en cuadros de distribucin, o en alterna a 110/220 Vca. En cualquier caso es la propia CPU la que alimenta las interfaces conectadas a travs del bus interno. La alimentacin a los circuitos E/S puede realizarse, segn tipos, en alterna a 110/220 Vca o en continua a 12/24/48 Vcc. La fuente de alimentacin del autmata puede incorporar una batera tampn, que se utiliza para el mantenimiento de algunas posiciones internas y del programa usuario en memoria RAM, cuando falla la alimentacin o se apaga el autmata.
29
En el control de un proceso automatizado, es imprescindible un dialogo entre operador-mquina junto con una comunicacin entre la mquina y el autmata, estas comunicaciones se establecern por medio del conjunto de entradas y salidas del citado elemento. Los autmatas son capaces de manejar tensiones y corrientes de nivel industrial, gracias a que disponen un bloque de circuitos de interfaz de E/S muy potente, que les permite conectarse directamente con los sensores y accionamientos del proceso. De entre todos los tipos de interfaces que existen, las interfaces especificas permiten la conexin con elementos muy concretos del proceso de automatizacin. Se pueden distinguir entre ellas tres grupos bien diferenciados: Entradas / salidas inteligentes. Entradas / salidas especiales. Procesadores perifricos inteligentes.
Interfaces
30
Las interfaces especiales del primer grupo se caracterizan por no influir en las variables de estado del proceso de automatizacin. nicamente se encargan de adecuar las E/S, para que puedan ser inteligibles por la CPU, si son entradas, o para que puedan ser interpretadas correctamente por actuadores (motores, cilindros, etc.), en el caso de las salidas. Las del segundo grupo admiten mltiples modos de configuracin, por medio de unas combinaciones binarias situadas en la misma tarjeta. De esta forma se descarga de trabajo a la unidad central, con las ventajas que conlleva.
Interfaces
Los procesadores perifricos inteligentes, son mdulos que incluyen su propio procesador, memorias y puntos auxiliares de entrada / salida. Estos procesadores contienen en origen un programa especializado en la ejecucin de una tarea concreta, a la que le basta conocer los puntos de consigna y los parmetros de aplicacin para ejecutar, de forma autnoma e independiente de la CPU principal, el programa de control.
31
Interfaces
32
Unidad de Programacin
Es el conjunto de medios hardware y software mediante los cuales el programador introduce y depura sobre las secuencias de instrucciones (en uno u otro lenguaje) que constituyen el programa a ejecutar.
33
Entrada y Salidas
La seccin de entradas mediante el interfaz, adapta y codifica de forma comprensible para la CPU las seales procedentes de los dispositivos de entrada o captadores. Hay dos tipos de entradas: Entradas digitales Entradas analgicas
La seccin de salida tambin mediante interfaz trabaja de forma inversa a las entradas, es decir, decodifica las seales procedentes de la CPU, y las amplifica y manda con ellas los dispositivos de salida o actuadores como lmparas, rels... aqu tambin existen unos interfaces de adaptacin a las salidas de proteccin de circuitos internos. Hay dos tipos de salidas: Salidas digitales Salidas analgicas
34
Entradas Digitales
Los mdulos de entrada digitales permiten conectar al autmata captadores de tipo todo o nada como finales de carrera pulsadores... Los mdulos de entrada digitales trabajan con seales de tensin, por ejemplo cuando por una va llegan 24 voltios se interpreta como un "1" y cuando llegan cero voltios se interpreta como un "0" El proceso de adquisicin de la seal digital consta de varias etapas. Proteccin contra sobretensiones Filtrado Puesta en forma de la onda Aislamiento galvnico o por optoacoplador
35
Entradas Analgicas
Los mdulos de entrada analgicas permiten que los autmatas programables trabajen con accionadores de mando analgico y lean seales de tipo analgico como pueden ser la temperatura, la presin o el caudal. Los mdulos de entradas analgicas convierten una magnitud analgica en un numero que se deposita en una variable interna del autmata. Lo que realiza es una conversin A/D, puesto que el autmata solo trabajar con seales digitales. Esta conversin se realiza con una precisin o resolucin determinada (numero de bits) y cada cierto intervalo de tiempo (periodo muestreo). Los mdulos de entrada analgica pueden leer tensin o intensidad. El proceso de adquisicin de la seal analgica consta de varias etapas: Filtrado Conversin A/D Memoria interna
36
Salidas Digitales
Un mdulo de salida digital permite al autmata programable actuar sobre los preaccionadores y accionadores que admitan ordenes de tipo todo o nada. El valor binario de las salidas digitales se convierte en la apertura o cierre de un rel interno del autmata en el caso de mdulos de salidas a rel. En los mdulos estticos (bornero), los elementos que conmutan son los componentes electrnico como transistores o triacs, y en los mdulos electromecnicos son contactos de rels internos al mdulo.
37
Salidas Digitales
Los mdulos de salidas estticos al suministrar tensin, solo pueden actuar sobre elementos que trabajan todos a la misma tensin, en cambio los mdulos de salida electromecnicos, al ser libres de tensin, pueden actuar sobre elementos que trabajen a tensiones distintas. El proceso de envo de la seal digital consta de varias etapas: Puesta en forma Aislamiento Circuito de mando (rel interno) Proteccin electrnica Tratamiento cortocircuitos
38
Salidas Digitales
El proceso de envo de la seal analgica consta de varias etapas: Aislamiento galvnico Conversin D/A Circuitos de amplificacin y adaptacin Proteccin electrnica de la salida Como hemos visto las seales analgicas sufren un gran proceso de adaptacin tanto en los mdulos de entrada como en los mdulos de salida. Las funciones de conversin A/D y D/A que realiza son esenciales. Por ello los mdulos de E/S analgicos se les considera mdulos de E/S especiales.
39
Los mdulos de salida analgica permiten que el valor de una variable numrica interna del autmata se convierta en tensin o intensidad.
Lo que realiza es una conversin D/A, puesto que el autmata solo trabaja con seales digitales. Esta conversin se realiza con una precisin o resolucin determinada (numero de bits) y cada cierto intervalo de tiempo (periodo muestreo). Esta tensin o intensidad puede servir de referencia de mando para actuadores que admitan mando analgico como pueden ser los variadores de velocidad, las etapas de los tiristores de los hornos, reguladores de temperatura... permitiendo al autmata realiza funciones de regulacin y control de procesos continuos.
Salidas Analgicas
40
Seales Analgicas y Digitales
41
La memoria es el almacn donde el autmata guarda todo cuanto necesita para ejecutar la tarea de control. Datos del proceso:
Seales de planta, entradas y salidas. Variables internas, de bit y de palabra. Datos alfanumricos y constantes.
Memoria
Datos de control:
Existen varios tipos de memorias:
Instrucciones de usuario (programa) Configuracin del autmata (modo de funcionamiento, nmero de e/s conectadas, . )
RAM. Memoria de lectura y escritura. ROM. Memoria de solo lectura, no reprogramable. EPRON. Memoria de solo lectura, reprogramables con borrado por ultravioletas. EPRON. Memoria de solo lectura, reprogramables con borrado por ultravioletas.
42
La memoria RAM se utiliza principalmente como memoria interna, y nicamente como memoria de programa en el caso de que pueda asegurarse el mantenimiento de los datos con una batera exterior. La memoria ROM se utiliza para almacenar el programa monitor del sistema como hemos visto en el apartado dedicado a la CPU. Las memorias EPROM se utilizan para almacenar el programa de usuario, una vez que ha sido convenientemente depurada. Las memorias EEPROM se emplean principalmente para almacenar programas, aunque en la actualidad es cada vez ms frecuente el uso de combinaciones RAM + EEPROM, utilizando estas ultimas como memorias de seguridad que salvan el contenido de las RAM. Una vez reanudada la alimentacin, el contenido de la EEPROM se vuelca sobre la RAM. Las soluciones de este tipo estn sustituyendo a las clsicas RAM + batera puesto que presentan muchos menos problemas.
43
Memoria
44
Memoria Interna
En un autmata programable, la memoria interna es aquella que almacena el estado de las variables que maneja el autmata: entradas, salidas, contadores, rels internos, seales de estado, etc. Esta memoria interna se encuentra dividida en varias reas, cada una de ellas con un cometido y caractersticas distintas. La clasificacin de la memoria interna no se realiza atendiendo a sus caractersticas de lectura y escritura, sino por el tipo de variables que almacena y el numero de bits que ocupa la variable. As, la memoria interna del autmata queda clasificada en las siguientes reas.
45
Memoria de Programa
La memoria de programa, normalmente externa y enchufable a la CPU mediante casete de memoria, almacena el programa escrito por el usuario para su aplicacin. Cada instruccin del usuario ocupa un paso o direccin del programa. Las memorias de programa o memorias de usuario son siempre de tipo permanente RAM + batera o EPROM/EEPROM . Por lo general la mayora de los fabricantes de autmatas ofrecen la posibilidad de utilizar memorias RAM con batera para la fase de desarrollo y depuracin de los programas, y de pasar estos a memorias no voltiles EPROM o EEPROM una vez finalizada esta fase. La ejecucin del programa en el mdulo es siempre prioritaria, de forma que si se da tensin al autmata con un mdulo conectado, la CPU ejecuta su programa y no el contenido en memoria RAM interna.
46
La Programacin
El sistema de programacin permite, mediante las instrucciones del autmata, confeccionar el programa de usuario. Posteriormente el programa realizado, se trasfiere a la memoria de programa de usuario.
Una memoria tpica permite almacenar como mnimo hasta mil instrucciones con datos de bit, y es del tipo lectura/escritura, permitiendo la modificacin del programa cuantas veces sea necesario. Tiene una batera tampn para mantener el programa si falla la tensin de alimentacin.
47
La Programacin
La programacin del autmata consiste en el establecimiento de una sucesin ordenada de instrucciones, escritas en un lenguaje de programacin concreto. Estas instrucciones estn disponibles en el sistema de programacin y resuelven el control de un proceso determinado.
48
Lenguaje de Programacin
Cuando hablamos de los lenguajes de programacin nos referimos a diferentes formas de poder escribir el programa usuario. Los software actuales nos permiten traducir el programa usuario de un lenguaje a otro, pudiendo as escribir el programa en el lenguaje que ms nos conviene. Existen varios tipos de lenguaje de programacin: Mnemnico o Lista de instrucciones. Esquema de contactos Esquema funcional No obstante, los lenguajes de programacin ms empleados en la actualidad son, el mnemnico y el esquema de contactos.
49
Contactos
Es un lenguaje grfico, derivado del lenguaje de rels, que mediante smbolos representa contactos, solenoides... . Su principal ventaja es que los smbolos bsicos estn normalizados segn normas NEMA y son empleados por todos los fabricantes. Los smbolos bsicos son:
50
Contactos
Los elementos bsicos que configuran la funcin se representan entre dos lneas verticales que simbolizan las lneas de alimentacin. Para las lneas de funcin ms complejas como temporizadores, registros de desplazamiento, etc., se emplea el formato de bloques. Estos no estn formalizados, aunque guardan una gran similitud entre s para distintos fabricantes y resultan mucho mas expresivos que si se utiliza para el mismo fin el lenguaje en lista de instrucciones o mnemnico.
51
Conceptos Generales
Un programa en esquema de contactos, la constituyen una serie de ramas de contactos. Una rama esta compuesta de una serie de contactos, conectados en serie o en paralelo que dan origen a una salida que bien puede ser una bobina o una funcin especial.
52
El flujo de la seal va de izquierda a derecha y de arriba abajo. A una rama de circuito en esquema de contactos le corresponde una secuencia de instrucciones en forma mnemnica. Todas las ramas de circuito se inician con una instruccin LOAD.
53
Una bobina no puede venir conectada directamente de la barra de inicio. En tal caso es necesario interponer un contacto siempre cerrado.
la derecha de una bobina no es posible programar ningn contacto. El nmero de contactos posibles en serie o en paralelo es prcticamente ilimitado. Es posible colocar en paralelo 2 o ms bobinas.
54
Mnemnicos
Un lenguaje en mnemnico o lista de instrucciones consiste en un conjunto de cdigos simblicos, cada uno de los cuales corresponde a una instruccin. Cada fabricante utiliza sus propios cdigos, y una nomenclatura distinta para nombrar las variables del sistema. El lenguaje en mnemnico es similar al lenguaje ensamblador del micro. Ejemplo: La lista de instrucciones utilizada en este proyecto son las del autmata CQM1H de OMRON
Direccin Instruccin Parmetro
0000
LD
H0501
55
Instrucciones de Programacin
56
Evaluacin de la Unidad 02
1 Qu es un autmata programable o PLC? 2 En qu tipo de instalaciones se utiliza? 3 Comenta algunas ventajas e inconvenientes de los autmatas. 4 Qu funciones bsicas realiza el PLC? Existen nuevas funciones? 5 Por qu diferentes unidades est compuesto el autmata? 6 Qu funcin desempea la CPU dentro del autmata? 7 Qu funcin desempean las fuentes de alimentacin dentro del autmata programable? 8 Qu tipos de interfaces existen? 9 Qu tipo de entradas existen? Explica. 10 De que partes consta el envo de la seal digital?
57
11 De qu partes consta el envo de las seales analgicas? 12 Porque se consideran los mdulos de E/S analgicos mdulos especiales? 13 Qu es lo que almacena la memoria interna? Como est dividida. De que tipo es? 14 Qu es lo que almacena la memoria de programa. De que tipo es? 15 Que tipo de estructuras externas existen? 16 De que procesos est compuesto el ciclo de funcionamiento? 17 De que subprocesos est compuesto el ciclo de operacin? Qu es lo que se hace en cada proceso? 18 Que es el tiempo de ejecucin? De que depende dicho tiempo?
Evaluacin de la Unidad 02
58
FUNCIONAMIENTO
Los autmatas programables son maquinas secuenciales que ejecutan correlativamente las instrucciones indicadas en el programa de usuario almacenado en su memoria, generando unas ordenes o seales de mando a partir de las seales de entrada ledas de la planta ( aplicacin): al detectarse cambios en las seales, el autmata reacciona segn el programa hasta obtener las ordenes de salida necesarias. Esta secuencia se ejecuta continuamente para conseguir el control actualizado del proceso.
La secuencia bsica de operacin del autmata se puede dividir en tres fases principales: Lectura de seales desde la interfaz de entradas. Procesado del programa para obtencin de las seales de control. Escritura de seales en la interfaz de salidas.
59
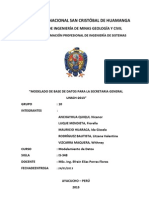
A fin de optimizar el tiempo, la lectura y escritura de las seales se realiza a la vez para todas las entradas y salidas; Entonces, las entradas ledas de los mdulos de entrada se guardan en una memoria temporal (Imagen entradas). A esta acude la CPU en la ejecucin del programa, y segn se va obteniendo las salidas, se guardan en otra memoria temporal (imagen de salida). Una vez ejecutado el programa completo, estas imgenes de salida se transfieren todas a la vez al mdulo de salida. El autmata realiza tambin otra serie de acciones que se van repitiendo peridicamente, definiendo un ciclo de operacin. Dichas acciones se pueden observar en el diagrama de bloques de la figura 2.2.1.
60 Figura 01
61
Modo de funcionamiento
El autmata puede trabajar de tres formas diferentes:
Program.- El PLC est en reposo y puede recibir o enviar el programa a un perifrco. Monitor .- El PLC ejecuta el programa que tiene en memoria.
Run.- El PLC ejecuta el programa que tiene en memoria permitiendo el cambio de valores en los registros del mismo.
62
Ciclo de funcionamiento
El funcionamiento del autmata es, salvo el proceso inicial que sigue a un Reset, de tipo secuencial y cclico, es decir, las operaciones tienen lugar una tras otra, y se van repitiendo continuamente mientras el autmata est bajo tensin.
La figura 01, muestra esquemticamente la secuencia de operaciones que ejecuta el autmata, siendo las operaciones del ciclo de operacin las que se repiten indefinidamente.
El ciclo de funcionamiento se divide en dos partes como se puede observar en el esquema de diagrama de la figura 01, llamados Proceso Inicial y Ciclo de Operacin
63
Proceso inicial
Como se muestra en la figura, antes de entrar en el ciclo de operacin el autmata realiza una serie de acciones comunes, que tratan fundamentalmente de inicializar los estados del mismo y chequear el hardware. Estas rutinas de chequeo, incluidas en el programa monitor ROM, comprueban: El bus de conexiones de las unidades de E/S. El nivel de la batera, si esta existe. La conexin de las memorias internas del sistema. El mdulo de memoria exterior conectado, si existe.
64
Proceso inicial
Si se encontrara algn error en el chequeo, se activara el LED de error y quedara registrado el cdigo del error. Se ponen a OFF las posiciones de memoria interna (excepto las mantenidas o protegidas contra perdidas de tensin. Se borran todas las posiciones de memoria imagen E/S. Se borran todos los contadores y temporizadores (excepto los mantenidos o protegidos contra perdidas de tensin).
Transcurrido el Proceso Inicial y si no han aparecido errores el autmata entra en el Ciclo de Operacin.
65
Ciclo de operacin
Este ciclo puede considerarse dividido en tres bloques tal y como se puede observar en la figura 01, dichos bloques son: Proceso Comn Ejecucin del programa Servicio a perifricos
66
Tiempo de ejecucin y control en tiempo real
El tiempo total que el autmata emplea para realizar un ciclo de operacin se llama tiempo de ejecucin de ciclo de operacin o ms sencillamente tiempo de ciclo "Scan time". Dicho tiempo depende de: El nmero de E/S involucradas. La longitud del programa usuario. El nmero y tipo de perifricos conectados al autmata.
67
Gracias por su atencin
Potrebbero piacerti anche
- Plan 10439 2008 Unsch TasasDocumento58 paginePlan 10439 2008 Unsch TasasRopas Interiores CarhuapomaNessuna valutazione finora
- Unidad 02Documento67 pagineUnidad 02Fiorella Luque MendietaNessuna valutazione finora
- Unidad 01Documento58 pagineUnidad 01Fiorella Luque MendietaNessuna valutazione finora
- Unidad 01Documento58 pagineUnidad 01Fiorella Luque MendietaNessuna valutazione finora
- Unidad 01Documento58 pagineUnidad 01Fiorella Luque MendietaNessuna valutazione finora
- Plan 10439 2008 Unsch TasasDocumento58 paginePlan 10439 2008 Unsch TasasRopas Interiores CarhuapomaNessuna valutazione finora
- Operaciones de MantenimientoDocumento6 pagineOperaciones de MantenimientoFiorella Luque MendietaNessuna valutazione finora
- Unidad+03+Plc LogoDocumento61 pagineUnidad+03+Plc LogoFiorella Luque MendietaNessuna valutazione finora
- Operaciones de MantenimientoDocumento6 pagineOperaciones de MantenimientoFiorella Luque MendietaNessuna valutazione finora
- G10IS348I3V1Documento54 pagineG10IS348I3V1Fiorella Luque MendietaNessuna valutazione finora
- Pe Credicoop 2012Documento86 paginePe Credicoop 2012Alexis Jussef Soto Carcasi100% (1)