Potrebbero piacerti anche
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shear Center LabDocumento9 pagineShear Center LabJulianSamayoaNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- EE 321 Lecture Notes 1Documento13 pagineEE 321 Lecture Notes 1JulianSamayoaNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Chapter2 Kinematics Fundamentals2Documento18 pagineChapter2 Kinematics Fundamentals2JulianSamayoaNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Design of Machinery: Chapter 1 Introduction SummaryDocumento9 pagineDesign of Machinery: Chapter 1 Introduction SummaryJulianSamayoa100% (2)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Conference Diplomacy: After Kenya's Independence in 1963, A Secession Movement Begun inDocumento3 pagineConference Diplomacy: After Kenya's Independence in 1963, A Secession Movement Begun inPeter KNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- PM Plan Template For PresentationDocumento3 paginePM Plan Template For Presentationjamal123456Nessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Giving Counsel PDFDocumento42 pagineGiving Counsel PDFPaul ChungNessuna valutazione finora
- Theatre History TimelineDocumento7 pagineTheatre History TimelineCzar Paulo Dabon100% (2)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- 125) League of Cities of The Philippines vs. COMELEC (G.R. No. 176951, April 12, 2011) 2Documento35 pagine125) League of Cities of The Philippines vs. COMELEC (G.R. No. 176951, April 12, 2011) 2Carmel Grace KiwasNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- If Tut 4Documento7 pagineIf Tut 4Ong CHNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Daily Lesson Log in Math 9Documento13 pagineDaily Lesson Log in Math 9Marjohn PalmesNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- How To Reset AutoCAD To Defaults - AutoCAD 2019 - Autodesk Knowledge NetworkDocumento11 pagineHow To Reset AutoCAD To Defaults - AutoCAD 2019 - Autodesk Knowledge NetworkZina MorNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Ayurveda Secrets of Healing Maya Tiwari.07172 2seasonal CleansingDocumento5 pagineAyurveda Secrets of Healing Maya Tiwari.07172 2seasonal CleansingkidiyoorNessuna valutazione finora
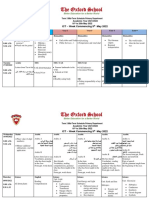
- Term 3 Mid-Term Assessment ScheduleDocumento9 pagineTerm 3 Mid-Term Assessment ScheduleRabia MoeedNessuna valutazione finora
- Predictor Corrector MethodsDocumento5 paginePredictor Corrector MethodsM2C7r6Nessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- (Cambridge Studies in Opera) Victoria Johnson, Jane F. Fulcher, Thomas Ertman-Opera and Society in Italy and France From Monteverdi To Bourdieu-Cambridge University Press (2007) PDFDocumento440 pagine(Cambridge Studies in Opera) Victoria Johnson, Jane F. Fulcher, Thomas Ertman-Opera and Society in Italy and France From Monteverdi To Bourdieu-Cambridge University Press (2007) PDFnbozekidis100% (3)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Transparency IIDocumento25 pagineTransparency IIKatyanne ToppingNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- E-Tech DLL Blank - Lesson 2-Nov 20-23Documento3 pagineE-Tech DLL Blank - Lesson 2-Nov 20-23Julie Ann SuarezNessuna valutazione finora
- Periods of Nursing HistoryDocumento38 paginePeriods of Nursing HistoryJeny Pearl Hijosa0% (1)
- Algebra 1 TextbookDocumento370 pagineAlgebra 1 TextbookLea Ann Smith80% (5)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Read Our Free Whitepaper: Philippine Supreme Court JurisprudenceDocumento32 pagineRead Our Free Whitepaper: Philippine Supreme Court JurisprudenceJoses Nino AguilarNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1091)
- Classroom of The Elite Year 2 Volume 4Documento49 pagineClassroom of The Elite Year 2 Volume 4ANANT GUPTANessuna valutazione finora
- MKT202 Ga Su23Documento4 pagineMKT202 Ga Su23Như Nguyễn QuỳnhNessuna valutazione finora
- DPC Rough Draft by Priti Guide (1953)Documento6 pagineDPC Rough Draft by Priti Guide (1953)Preeti GuideNessuna valutazione finora
- Grade 5 DLL Science 5 q1 Week 2aDocumento4 pagineGrade 5 DLL Science 5 q1 Week 2aTrese OliveNessuna valutazione finora
- DDC 4Documento1 paginaDDC 4MayconDelPieroNessuna valutazione finora
- Indian Standard: General Technical Delivery Requirements FOR Steel and Steel ProductsDocumento17 pagineIndian Standard: General Technical Delivery Requirements FOR Steel and Steel ProductsPermeshwara Nand Bhatt100% (1)
- QuestionnaireDocumento4 pagineQuestionnairevishal chauhanNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Alaska Non-Timber Forest Products Harvest ManualDocumento41 pagineAlaska Non-Timber Forest Products Harvest Manualtigriochelito100% (1)
- Coronel Vs CA, GR No 103577Documento10 pagineCoronel Vs CA, GR No 103577AddAllNessuna valutazione finora
- 1st Year Unit 7 Writing A Letter About A CelebrationDocumento2 pagine1st Year Unit 7 Writing A Letter About A CelebrationmlooooolNessuna valutazione finora
- ST Unit2Documento75 pagineST Unit2Abhinav AbzNessuna valutazione finora
- Help Us Clean The Government HospitalsDocumento3 pagineHelp Us Clean The Government HospitalsSelva GanapathyNessuna valutazione finora
- Introduction To Qualitative ResearchDocumento19 pagineIntroduction To Qualitative ResearchAnonymous LToOBqDNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)