Potrebbero piacerti anche
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDa EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoValutazione: 4.5 su 5 stelle4.5/5 (12)
- Análisis Pseudo TridimensionalDocumento9 pagineAnálisis Pseudo Tridimensionaldarker_oblivion7233Nessuna valutazione finora
- Libro FisicaDocumento169 pagineLibro FisicapoliciologoNessuna valutazione finora
- 1er Libro de Analisis IIDocumento212 pagine1er Libro de Analisis IIvladimirjlgNessuna valutazione finora
- UF1253 - Diagnóstico de deformaciones estructuralesDa EverandUF1253 - Diagnóstico de deformaciones estructuralesNessuna valutazione finora
- Antonin Carême BiografíaDocumento9 pagineAntonin Carême BiografíaNaybeth AcostaNessuna valutazione finora
- Evaluacion Trabajo en CalienteDocumento2 pagineEvaluacion Trabajo en Calientegonzors0% (1)
- C05 IndicialDocumento20 pagineC05 IndicialxxickoNessuna valutazione finora
- Apuntes de Análisis Estructural - Flores, BrewerDocumento246 pagineApuntes de Análisis Estructural - Flores, BrewerAlejandro PerezNessuna valutazione finora
- Problema 4 - Geotecnia AplicadaDocumento22 pagineProblema 4 - Geotecnia AplicadaRafael OrtizNessuna valutazione finora
- Analisis en 3d ArmadurasDocumento19 pagineAnalisis en 3d ArmadurasAlejandra Briones MartinezNessuna valutazione finora
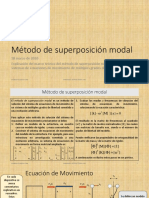
- Método de Superposición ModalDocumento37 pagineMétodo de Superposición ModalSANTIAGO TORRESNessuna valutazione finora
- Drenaje Linfatico Leduc 2014 PDFDocumento10 pagineDrenaje Linfatico Leduc 2014 PDFCristopher Castro Rd100% (1)
- Barbat-Oller-Vielma, MIS56, 2005 PDFDocumento200 pagineBarbat-Oller-Vielma, MIS56, 2005 PDFAlex Gomez LlallahuiNessuna valutazione finora
- Guia Metodo Slope Deflection 2013Documento13 pagineGuia Metodo Slope Deflection 2013Kevin Farias Verruggio100% (1)
- DINÁMICA DE ESTRUCTURAS (91123) - Clase 1Documento33 pagineDINÁMICA DE ESTRUCTURAS (91123) - Clase 1Francisco GarcesNessuna valutazione finora
- Análisis SísmicoDocumento310 pagineAnálisis SísmicoAce StencilNessuna valutazione finora
- Slope y Ejercicios PDFDocumento27 pagineSlope y Ejercicios PDFIsrael Salazar de ArayaNessuna valutazione finora
- ANEXO 4.a-Bases DiseñoEstación TIPO ML6 EN GRAVADocumento29 pagineANEXO 4.a-Bases DiseñoEstación TIPO ML6 EN GRAVAJermey WhitakerNessuna valutazione finora
- Trabajo de Agua PotableDocumento14 pagineTrabajo de Agua PotableChristian Miguel Salazar RojasNessuna valutazione finora
- Examen Parcial 2 de Obras Hidraulicas Suncion EricsonDocumento17 pagineExamen Parcial 2 de Obras Hidraulicas Suncion EricsonEricson David Suncion ChuyesNessuna valutazione finora
- Mecanica de Suelos II (9850)Documento10 pagineMecanica de Suelos II (9850)Carolina CordobaNessuna valutazione finora
- FCFM Uchile ResumenDocumento69 pagineFCFM Uchile ResumenPedro Troncoso AcuñaNessuna valutazione finora
- 12 Dinamica de Estructuras de AutosDocumento4 pagine12 Dinamica de Estructuras de AutosJorgeLeon1234Nessuna valutazione finora
- ACI 318S-14 Fernando YañezDocumento48 pagineACI 318S-14 Fernando YañezMiroslav100% (1)
- Diseño Aguas Lluvias, SERVIUDocumento31 pagineDiseño Aguas Lluvias, SERVIUClaudio A. Carrasco S.Nessuna valutazione finora
- Clase 05 Pilotes Sometidos A Carga AxialDocumento27 pagineClase 05 Pilotes Sometidos A Carga AxialTomás Ignacio Espinoza AravenaNessuna valutazione finora
- Resitencia de Materiale 2020Documento15 pagineResitencia de Materiale 2020Ivan M. GüichardoNessuna valutazione finora
- Prueba 1 Dinámica EstructuralDocumento2 paginePrueba 1 Dinámica EstructuralMARIA JULIANA RIVEROS COELLONessuna valutazione finora
- Etabs y Hormigon Armado PDFDocumento21 pagineEtabs y Hormigon Armado PDFFernando AldayuzNessuna valutazione finora
- 07.indice AbsorcionDocumento2 pagine07.indice Absorcionraulmonroe7564Nessuna valutazione finora
- Calculo Redes SanitariasDocumento94 pagineCalculo Redes SanitariasClaudio Gonzalez OiselNessuna valutazione finora
- Formularios de Mecanica de Los MaterialesDocumento23 pagineFormularios de Mecanica de Los MaterialesimeldoNessuna valutazione finora
- 6° Método Pendiente Deflexión (Gonzales Cuevas)Documento44 pagine6° Método Pendiente Deflexión (Gonzales Cuevas)Ismael Cabello CarrilloNessuna valutazione finora
- Apuntesdiha2007 PDFDocumento303 pagineApuntesdiha2007 PDFaasdadsdaNessuna valutazione finora
- Área Momento - Portico1 - Guia PDFDocumento10 pagineÁrea Momento - Portico1 - Guia PDFanon_270313585Nessuna valutazione finora
- 04 Analisis Estructural 2 - Metodo Indirecto de RigidezDocumento39 pagine04 Analisis Estructural 2 - Metodo Indirecto de RigidezAlexander Camala NinaNessuna valutazione finora
- C1 - Cap1 - IntroducciónDocumento28 pagineC1 - Cap1 - IntroducciónRoberto Sotomayor MurilloNessuna valutazione finora
- Lineas de Fluencia Clase PendienteDocumento11 pagineLineas de Fluencia Clase PendienteMarvin Joseph Bayona Chinchilla100% (1)
- Trabajo Final HuancaDocumento39 pagineTrabajo Final HuancaAntonio GANessuna valutazione finora
- Vigas CurvasDocumento6 pagineVigas CurvasNéstor Ulloa AuquiNessuna valutazione finora
- Resistencia de Materiales 1 UnfvDocumento22 pagineResistencia de Materiales 1 UnfvyeritzaNessuna valutazione finora
- 1 ContenidoDocumento4 pagine1 ContenidoIrving PalominoNessuna valutazione finora
- Calculo y Dimensionado de LosasDocumento11 pagineCalculo y Dimensionado de LosasDamianFrancucci100% (1)
- Problemas Resueltos de Concreto Armado PROBLEMA 2: en Un Exclusivo Edificio Destinado A Servicios de Hotelería, Se Tienen enDocumento4 pagineProblemas Resueltos de Concreto Armado PROBLEMA 2: en Un Exclusivo Edificio Destinado A Servicios de Hotelería, Se Tienen enEfraín Damiano AlarcónNessuna valutazione finora
- Laboratorio de Analisis Estructural 2Documento30 pagineLaboratorio de Analisis Estructural 2Luis Lévano NavarroNessuna valutazione finora
- Abastecimiento de Agua y Alcantarillado FinalDocumento154 pagineAbastecimiento de Agua y Alcantarillado FinalRogerHermozaNessuna valutazione finora
- Clase20 Clasificacion EDPDocumento34 pagineClase20 Clasificacion EDPMarcos Manuel Moreno ThompsonNessuna valutazione finora
- MEF00100 GalerkinDocumento9 pagineMEF00100 GalerkinAgente P.Nessuna valutazione finora
- Diplomado DCOS Admisión 2022Documento2 pagineDiplomado DCOS Admisión 2022Carlos García ZapataNessuna valutazione finora
- 03.3 Diseño y Cálculo EstructuralDocumento109 pagine03.3 Diseño y Cálculo EstructuralJuan Carlos DominguezNessuna valutazione finora
- Ci4203 PDFDocumento5 pagineCi4203 PDFjaretamalNessuna valutazione finora
- Diplomado Cos 2022Documento2 pagineDiplomado Cos 2022siktorNessuna valutazione finora
- Programa Analítico Estatica 7IC122Documento5 paginePrograma Analítico Estatica 7IC122Horacio ApolayoNessuna valutazione finora
- Civ308 Contenido y Bibliografia UagrmDocumento4 pagineCiv308 Contenido y Bibliografia UagrmAbdon ZarateNessuna valutazione finora
- Dialnet ProblemasDeResistenciaDeMateriales 267957Documento460 pagineDialnet ProblemasDeResistenciaDeMateriales 267957Jose Francisco CalizayaNessuna valutazione finora
- Guía Método de Rigidez Directa o Generación Directa.Documento28 pagineGuía Método de Rigidez Directa o Generación Directa.diego_cascanteNessuna valutazione finora
- Guía Método de Rigidez Matricial REV.2-1Documento29 pagineGuía Método de Rigidez Matricial REV.2-1Jose ErnestoNessuna valutazione finora
- Guía Método de Flexibilidad REV.2Documento24 pagineGuía Método de Flexibilidad REV.2Nicolás Flores JiménezNessuna valutazione finora
- Tarea 3 Analisis (Juan Carlos Escobar Sanchez)Documento22 pagineTarea 3 Analisis (Juan Carlos Escobar Sanchez)Juan Carlos Escobar SácnhezNessuna valutazione finora
- PAG 55-77 Modelo Matematico para La Estimacion de La Vida Util de Recestimineto de MolinosDocumento23 paginePAG 55-77 Modelo Matematico para La Estimacion de La Vida Util de Recestimineto de MolinosAlex vilcaNessuna valutazione finora
- Tarea 4 - FernandoDocumento13 pagineTarea 4 - FernandoRaul Fernando Rodriguez RiveraNessuna valutazione finora
- El Triángulo: Nombre: FechaDocumento1 paginaEl Triángulo: Nombre: FechaAndres LopezNessuna valutazione finora
- El Tigre y La VacaDocumento3 pagineEl Tigre y La VacaAndres LopezNessuna valutazione finora
- Las Cabras TestarudasDocumento3 pagineLas Cabras TestarudasAndres Lopez0% (1)
- PATareaValidadoAS CALCULO DIFERENCIALDocumento3 paginePATareaValidadoAS CALCULO DIFERENCIALYoel YauriNessuna valutazione finora
- 2.2.1 Hitos y Tareas PDFDocumento8 pagine2.2.1 Hitos y Tareas PDFAndres LopezNessuna valutazione finora
- Ana y Su DonDocumento4 pagineAna y Su DonAndres LopezNessuna valutazione finora
- 6 Problemas de Costo de CapitalDocumento2 pagine6 Problemas de Costo de CapitalAndres LopezNessuna valutazione finora
- Manual Trimble Access M3Documento19 pagineManual Trimble Access M3Edison Javier Albuja ProañoNessuna valutazione finora
- Caudal EsDocumento36 pagineCaudal EsYetchan QuiveNessuna valutazione finora
- Voluntad en La Naturaleza, SchopenhauerDocumento2 pagineVoluntad en La Naturaleza, SchopenhauerSlania SsNessuna valutazione finora
- Proyecto Edificio Multifamiliar IntegtradorDocumento2 pagineProyecto Edificio Multifamiliar IntegtradorJULIO CESAR CHAYACANI TERRESNessuna valutazione finora
- Trabajo Completo HipertensionDocumento35 pagineTrabajo Completo HipertensionAleex SiguenzaNessuna valutazione finora
- Traduccion Guias ESPEN de NE PDFDocumento3 pagineTraduccion Guias ESPEN de NE PDFDavid M. Lesmes100% (1)
- Reto 7-2Documento1 paginaReto 7-2LUIS ALFONSONessuna valutazione finora
- RECETARIODocumento4 pagineRECETARIOAriel HdezNessuna valutazione finora
- Protocolo de Acceso 10Documento6 pagineProtocolo de Acceso 10Jose DiazNessuna valutazione finora
- Escogiendo Lo Mejor PDFDocumento63 pagineEscogiendo Lo Mejor PDFDicin G GuerraNessuna valutazione finora
- Presa Los EjidosDocumento14 paginePresa Los EjidosWils Adolfo Calle TorresNessuna valutazione finora
- Parcial 1 CompuDocumento20 pagineParcial 1 CompuTobe Dc50% (2)
- Taller-Topologia MesaRojas SIG61Documento7 pagineTaller-Topologia MesaRojas SIG61JULIETH ALEXANDRA MESA ROJASNessuna valutazione finora
- Reconocimiento de SemillasDocumento16 pagineReconocimiento de SemillasNicole Irene100% (1)
- Alu Stock GA3 Presentacion - e - IndiceDocumento10 pagineAlu Stock GA3 Presentacion - e - IndiceCPNessuna valutazione finora
- Aplicaciones de Funciones RealesDocumento13 pagineAplicaciones de Funciones Realesedith70% (10)
- Clasificacion de Los Costos Segun Su Aplicacion - Elemento-9 de ContabilidadDocumento44 pagineClasificacion de Los Costos Segun Su Aplicacion - Elemento-9 de ContabilidadGary Ramírez ArceNessuna valutazione finora
- Tarea 2Documento4 pagineTarea 2Lorena Zamudio100% (1)
- Introducción Urbanización Alto BonitoDocumento8 pagineIntroducción Urbanización Alto BonitoYeison Ñañez ValdesNessuna valutazione finora
- Informe Aceites EsencialesDocumento8 pagineInforme Aceites EsencialesAugusto Muñoz VillarrealNessuna valutazione finora
- Especificaciones Tecnicas Estructuras LOCAL SEDA CUSCODocumento39 pagineEspecificaciones Tecnicas Estructuras LOCAL SEDA CUSCOErik VilchezNessuna valutazione finora
- Elogio de La FilosofiaDocumento4 pagineElogio de La FilosofiaPatricia KingsleighNessuna valutazione finora
- Hambre de SojaDocumento4 pagineHambre de SojaLuis Lerma100% (1)
- BarómetrosDocumento2 pagineBarómetrosnicol pomaNessuna valutazione finora
- Tema 09 Tuberias RamificadasDocumento18 pagineTema 09 Tuberias RamificadasJose Jhulinio Machuca RojasNessuna valutazione finora
- Syllabus de Fisica MAESTRIA 29-04-2013Documento3 pagineSyllabus de Fisica MAESTRIA 29-04-2013Edin Ronald Alva GuerreroNessuna valutazione finora
- Escuelas Arriba 5to Año Básico 2021Documento3 pagineEscuelas Arriba 5to Año Básico 2021María Eugenia Lara PonceNessuna valutazione finora
- Desarrollando Habilidades SensorialesDocumento22 pagineDesarrollando Habilidades SensorialesMacarena Moraga SandovalNessuna valutazione finora