Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Some Solutions To Enderton LogicDocumento16 pagineSome Solutions To Enderton LogicJason100% (1)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Revised PARA Element2 Radio LawsDocumento81 pagineRevised PARA Element2 Radio LawsAurora Pelagio Vallejos100% (4)
- CSCI 123 - Final ExamDocumento15 pagineCSCI 123 - Final ExamBrianYoungNessuna valutazione finora
- Model Personal StatementDocumento2 pagineModel Personal StatementSwayam Tripathy100% (1)
- A History of The Ecological Sciences, Part 1 - Early Greek OriginsDocumento6 pagineA History of The Ecological Sciences, Part 1 - Early Greek OriginskatzbandNessuna valutazione finora
- EceDocumento75 pagineEcevignesh16vlsiNessuna valutazione finora
- SQL TestDocumento10 pagineSQL TestGautam KatlaNessuna valutazione finora
- Solutions Jet FuelDocumento4 pagineSolutions Jet FuelkevinNessuna valutazione finora
- " Suratgarh Super Thermal Power Station": Submitted ToDocumento58 pagine" Suratgarh Super Thermal Power Station": Submitted ToSahuManishNessuna valutazione finora
- List of Institutions With Ladderized Program Under Eo 358 JULY 2006 - DECEMBER 31, 2007Documento216 pagineList of Institutions With Ladderized Program Under Eo 358 JULY 2006 - DECEMBER 31, 2007Jen CalaquiNessuna valutazione finora
- Diffrent Types of MapDocumento3 pagineDiffrent Types of MapIan GamitNessuna valutazione finora
- The Algorithm Development and Implementation For 3D Printers Based On Adaptive PID ControllerDocumento8 pagineThe Algorithm Development and Implementation For 3D Printers Based On Adaptive PID ControllerShahrzad GhasemiNessuna valutazione finora
- KV4BBSR Notice ContractuaL Interview 2023-24Documento9 pagineKV4BBSR Notice ContractuaL Interview 2023-24SuchitaNessuna valutazione finora
- Vacon NX, Non-Regenerative Front End FI9 UD01217B PDFDocumento48 pagineVacon NX, Non-Regenerative Front End FI9 UD01217B PDFSilvian IonescuNessuna valutazione finora
- Datasheet - HK ml7012-04 3364913Documento22 pagineDatasheet - HK ml7012-04 3364913kami samaNessuna valutazione finora
- Real Options BV Lec 14Documento49 pagineReal Options BV Lec 14Anuranjan TirkeyNessuna valutazione finora
- Philippine Rural Development Project: South Luzon Cluster C Ommunication Resourc ES Management WorkshopDocumento45 paginePhilippine Rural Development Project: South Luzon Cluster C Ommunication Resourc ES Management WorkshopAlorn CatibogNessuna valutazione finora
- Assessment PN1096617Documento14 pagineAssessment PN1096617Amr TarekNessuna valutazione finora
- Eea2a - HOLIDAY HOMEWORK XIIDocumento12 pagineEea2a - HOLIDAY HOMEWORK XIIDaksh YadavNessuna valutazione finora
- Week 2 - Sulphur DyesDocumento5 pagineWeek 2 - Sulphur DyesRR TNessuna valutazione finora
- Module 1 Dynamics of Rigid BodiesDocumento11 pagineModule 1 Dynamics of Rigid BodiesBilly Joel DasmariñasNessuna valutazione finora
- SUNGLAO - TM PortfolioDocumento60 pagineSUNGLAO - TM PortfolioGIZELLE SUNGLAONessuna valutazione finora
- Operation ManagementDocumento4 pagineOperation ManagementHananiya GizawNessuna valutazione finora
- Office Administration: School-Based AssessmentDocumento17 pagineOffice Administration: School-Based AssessmentFelix LawrenceNessuna valutazione finora
- Bomba Manual Hidraulica - P 19 LDocumento2 pagineBomba Manual Hidraulica - P 19 LBruno PachecoNessuna valutazione finora
- CNC Manuel de Maintenance 15i 150i ModelADocumento526 pagineCNC Manuel de Maintenance 15i 150i ModelASebautomatismeNessuna valutazione finora
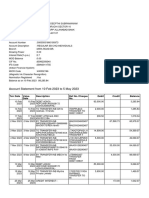
- Feb-May SBI StatementDocumento2 pagineFeb-May SBI StatementAshutosh PandeyNessuna valutazione finora
- Asian Paints Final v1Documento20 pagineAsian Paints Final v1Mukul MundleNessuna valutazione finora
- 1 Lesson Plan Self Assessment 1Documento1 pagina1 Lesson Plan Self Assessment 1Neha SharmaNessuna valutazione finora
- Disbursement VoucherDocumento7 pagineDisbursement VoucherDan MarkNessuna valutazione finora