Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Powersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDocumento1 paginaPowersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Multipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDocumento1 paginaMultipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
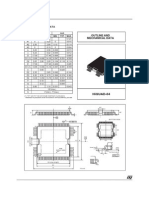
- Powerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDocumento1 paginaPowerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDan EsentherNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Powerso16: Outline and Mechanical DataDocumento1 paginaPowerso16: Outline and Mechanical DataDan EsentherNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Pso 36Documento1 paginaPso 36Dan EsentherNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- PSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDocumento1 paginaPSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDan EsentherNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Powerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDocumento1 paginaPowerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDan EsentherNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Ppak Mechanical Data: Dim. Min. TYP MaxDocumento1 paginaPpak Mechanical Data: Dim. Min. TYP MaxDan EsentherNessuna valutazione finora
- Hiquad 64Documento1 paginaHiquad 64Dan EsentherNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- L9929Documento3 pagineL9929Dan EsentherNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Documento26 pagineFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- 10640Documento22 pagine10640Dan EsentherNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- 10831Documento21 pagine10831Dan EsentherNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- VNQ830A-E: Quad Channel High Side DriverDocumento17 pagineVNQ830A-E: Quad Channel High Side DriverDan EsentherNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- 10830Documento21 pagine10830Dan EsentherNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- 10832Documento26 pagine10832Dan EsentherNessuna valutazione finora
- 10833Documento18 pagine10833Dan EsentherNessuna valutazione finora
- 10683Documento19 pagine10683Dan EsentherNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
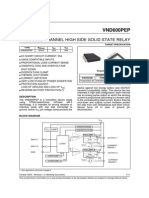
- VND830PEP-E: Double Channel High Side DriverDocumento13 pagineVND830PEP-E: Double Channel High Side DriverDan EsentherNessuna valutazione finora
- 10022Documento262 pagine10022Dan EsentherNessuna valutazione finora
- 10302Documento4 pagine10302Dan EsentherNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Uh 30Documento10 pagineUh 30Dan EsentherNessuna valutazione finora
- 9696Documento17 pagine9696Dan EsentherNessuna valutazione finora
- 10303Documento5 pagine10303Dan EsentherNessuna valutazione finora
- 9933Documento11 pagine9933Dan EsentherNessuna valutazione finora
- 9927Documento11 pagine9927Dan EsentherNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- 9926Documento10 pagine9926Dan EsentherNessuna valutazione finora
- 10261Documento10 pagine10261Dan EsentherNessuna valutazione finora
- 9792Documento21 pagine9792Dan EsentherNessuna valutazione finora
- TFQN05110004R1Documento1 paginaTFQN05110004R1Vanusha AdihettyNessuna valutazione finora
- PT124B 121 (英文)Documento2 paginePT124B 121 (英文)Jose Villalobos CoralNessuna valutazione finora
- DCM Dispersion Compensation Modules Data SheetDocumento2 pagineDCM Dispersion Compensation Modules Data SheetPNessuna valutazione finora
- Output Filter Design Guide - MG90N502Documento47 pagineOutput Filter Design Guide - MG90N502DavorNessuna valutazione finora
- 36476-3 MID 144 SID 230 Idle Validation Switch 1 CheckDocumento4 pagine36476-3 MID 144 SID 230 Idle Validation Switch 1 CheckTun Tun Win KseNessuna valutazione finora
- PDFDocumento8 paginePDFNorng VibolNessuna valutazione finora
- Galil Single Axis Motion Controller BrochureDocumento2 pagineGalil Single Axis Motion Controller BrochureElectromateNessuna valutazione finora
- Analog Mod NotesDocumento50 pagineAnalog Mod NotesSmriti Rai M.Tech. Dept. of Electronics Engg. IIT (BHU)Nessuna valutazione finora
- Light Emitting PolymersDocumento16 pagineLight Emitting PolymersParichay PapnoiNessuna valutazione finora
- EXPERIMENT 11: Uni-Junction Transistor (UJT) CHARACTERISTICSDocumento4 pagineEXPERIMENT 11: Uni-Junction Transistor (UJT) CHARACTERISTICSdilawar sumraNessuna valutazione finora
- Week 15. Equipment in QD ExamDocumento5 pagineWeek 15. Equipment in QD ExamArriane Steph ZapataNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Flat Screen LCD TV RepairDocumento70 pagineFlat Screen LCD TV RepairManuel Linares67% (3)
- 12v Battery Charger Circuit With Auto Cut Off - Circuits GalleryDocumento40 pagine12v Battery Charger Circuit With Auto Cut Off - Circuits GalleryRamKumar0% (1)
- DS276 Low Power Transceiver Chip: Features Pin AssignmentDocumento11 pagineDS276 Low Power Transceiver Chip: Features Pin AssignmentJairo PadronNessuna valutazione finora
- Aether Gravity TechnologyDocumento328 pagineAether Gravity Technologyrossix1100% (2)
- Automotive-Grade, Galvanically Isolated Current Sensor IC With Common-Mode Field Rejection in A Small-Footprint SOIC8 PackageDocumento24 pagineAutomotive-Grade, Galvanically Isolated Current Sensor IC With Common-Mode Field Rejection in A Small-Footprint SOIC8 PackageVito LaudicinaNessuna valutazione finora
- Physics June 2001 p1Documento13 paginePhysics June 2001 p1Dexter BNessuna valutazione finora
- PM Cat-10 1031Documento2 paginePM Cat-10 1031RP POWER ELECTRICAL SALEMNessuna valutazione finora
- Standard and Specs RE & Gen Final-Electrical PDFDocumento31 pagineStandard and Specs RE & Gen Final-Electrical PDFAlok Kumar GuptaNessuna valutazione finora
- 马弗炉ceramic fiber muffle furnace mc2.5-12Documento13 pagine马弗炉ceramic fiber muffle furnace mc2.5-12Ri ChardNessuna valutazione finora
- Micom P125/P126 & P127: Directional/Non-directional RelayDocumento596 pagineMicom P125/P126 & P127: Directional/Non-directional Relayjigyesh29Nessuna valutazione finora
- Unit - 02: Current ElectricityDocumento4 pagineUnit - 02: Current ElectricityswadhinNessuna valutazione finora
- Creative Electronics Group BDocumento44 pagineCreative Electronics Group BumairNessuna valutazione finora
- C-Cores PDFDocumento32 pagineC-Cores PDFbpchimeraNessuna valutazione finora
- Application of The Ge Flicker CurveDocumento3 pagineApplication of The Ge Flicker CurveGustavo PérezNessuna valutazione finora
- Form Two Physics Handbook 1 1 1Documento60 pagineForm Two Physics Handbook 1 1 1Kisaka GNessuna valutazione finora
- Testrano 600: Three-Phase Test System For Comprehensive Power and Distribution Transformer TestingDocumento16 pagineTestrano 600: Three-Phase Test System For Comprehensive Power and Distribution Transformer Testingזיו קלייןNessuna valutazione finora
- 1 s2.0 S0301421516305055 MainDocumento8 pagine1 s2.0 S0301421516305055 MainAli AhmadNessuna valutazione finora
- 20TL / 33TL: Three-Phase TL Inverters With The Maximum Efficiency at The Best PriceDocumento4 pagine20TL / 33TL: Three-Phase TL Inverters With The Maximum Efficiency at The Best PriceMarcelo SilvaNessuna valutazione finora