Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- And Power in Full Subtractor Circuit: Transistor Gating: Reduction of Leakage CurrentDocumento11 pagineAnd Power in Full Subtractor Circuit: Transistor Gating: Reduction of Leakage CurrentBhupender KumawatNessuna valutazione finora
- 1 Amdocs Seating PlanDocumento23 pagine1 Amdocs Seating PlanBhupender KumawatNessuna valutazione finora
- Rtlinux: (Ece-496) Section-E2E04Documento3 pagineRtlinux: (Ece-496) Section-E2E04Bhupender KumawatNessuna valutazione finora
- Low Power High Speed Multipliers: Submitted byDocumento22 pagineLow Power High Speed Multipliers: Submitted byBhupender KumawatNessuna valutazione finora
- 04 AcknowledgementsDocumento2 pagine04 AcknowledgementsBhupender KumawatNessuna valutazione finora
- 5705 - 1 - HCL Extempore Based 2nd Session - 25th SepDocumento18 pagine5705 - 1 - HCL Extempore Based 2nd Session - 25th SepBhupender KumawatNessuna valutazione finora
- Gilbert Cell DesignDocumento21 pagineGilbert Cell DesignBhupender KumawatNessuna valutazione finora
- The CMOS Fabrication Process & Design RulesDocumento8 pagineThe CMOS Fabrication Process & Design RulesBhupender KumawatNessuna valutazione finora
- 1 LandraDocumento1 pagina1 LandraBhupender KumawatNessuna valutazione finora
- Cadence Design Tools TutorialDocumento124 pagineCadence Design Tools TutorialBhupender KumawatNessuna valutazione finora
- HTML TablesDocumento2 pagineHTML TablesBhupender KumawatNessuna valutazione finora
- Mobile Phone Detector: Indian Institute of Technology HyderabadDocumento7 pagineMobile Phone Detector: Indian Institute of Technology HyderabadBhupender KumawatNessuna valutazione finora
- HTML Basic - : 4 ExamplesDocumento2 pagineHTML Basic - : 4 ExamplesBhupender KumawatNessuna valutazione finora
- Crystal, Silicon, Ceramic, and LC Material Properties and FeaturesDocumento4 pagineCrystal, Silicon, Ceramic, and LC Material Properties and FeaturesBhupender KumawatNessuna valutazione finora
- Programming - Constants and VariablesDocumento2 pagineProgramming - Constants and VariablesBhupender KumawatNessuna valutazione finora
- By. Virendra Kumar. By. Virendra Kumar. B.Tech (E.E.E) B.Tech (E.E.E) 7080710275 7080710275Documento29 pagineBy. Virendra Kumar. By. Virendra Kumar. B.Tech (E.E.E) B.Tech (E.E.E) 7080710275 7080710275Bhupender KumawatNessuna valutazione finora
- Um 66Documento4 pagineUm 66Bhupender KumawatNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- 14-4 CNLM WebDocumento58 pagine14-4 CNLM WebAu GroupsNessuna valutazione finora
- Learn Digital MarketingDocumento8 pagineLearn Digital Marketingshaik yasarNessuna valutazione finora
- RUBY SHARMA - FinalProjectReport 1 - Ruby SharmaDocumento26 pagineRUBY SHARMA - FinalProjectReport 1 - Ruby SharmaJITHINNessuna valutazione finora
- Dyna 86l 8086 P Training Development System With LCD PDFDocumento1 paginaDyna 86l 8086 P Training Development System With LCD PDFSoluchanNessuna valutazione finora
- Automatic TransmissionDocumento5 pagineAutomatic Transmissionolyga mgolNessuna valutazione finora
- FAQ Install An eCOM PartP Interface With DTS V8.06Documento5 pagineFAQ Install An eCOM PartP Interface With DTS V8.06Dylan DYNessuna valutazione finora
- Chapter 4 Cookies & Browser DataDocumento51 pagineChapter 4 Cookies & Browser DataPriya MaliNessuna valutazione finora
- DSP and Multicore ProcessorsDocumento12 pagineDSP and Multicore Processorsvvsulakhe6337Nessuna valutazione finora
- RFID Based Attendance SystemDocumento3 pagineRFID Based Attendance SystemKulbir GodaraNessuna valutazione finora
- Components of .Net Framework, CLR, CTS, CLS, Base Class LibraryDocumento7 pagineComponents of .Net Framework, CLR, CTS, CLS, Base Class LibraryAnshu PrasadNessuna valutazione finora
- ReadmeDocumento11 pagineReadmeCristian NtcNessuna valutazione finora
- Microcontroller 8051, Instruction SetDocumento140 pagineMicrocontroller 8051, Instruction Setgopir28Nessuna valutazione finora
- IT Chap 1Documento11 pagineIT Chap 1ChinNessuna valutazione finora
- 1 A Review On Internet of ThingsDocumento11 pagine1 A Review On Internet of ThingsTeddy IswahyudiNessuna valutazione finora
- gfx50s2 NFG en S FDocumento12 paginegfx50s2 NFG en S FHanNessuna valutazione finora
- ADM12864HDocumento14 pagineADM12864HluinksNessuna valutazione finora
- Bipolar Junction TransistorDocumento27 pagineBipolar Junction TransistorBlank CoderNessuna valutazione finora
- 25AA640/25LC640: 64K SPI Bus Serial EEPROMDocumento24 pagine25AA640/25LC640: 64K SPI Bus Serial EEPROMnguyenluongdpNessuna valutazione finora
- Bachelor Thesis: Oslo and Akershus University College of Applied SciencesDocumento155 pagineBachelor Thesis: Oslo and Akershus University College of Applied SciencesexcalidorNessuna valutazione finora
- Arquitectura de SoftwareDocumento6 pagineArquitectura de SoftwareDiego Alejandro Muñoz ToroNessuna valutazione finora
- Core Java Concepts-2Documento1 paginaCore Java Concepts-2rizwanNessuna valutazione finora
- HA-646 BrochureDocumento1 paginaHA-646 BrochureFelhazi AndreiNessuna valutazione finora
- Philips DVDR985 2022Documento270 paginePhilips DVDR985 2022Doru RazvanNessuna valutazione finora
- Ramdump Modem 2021-03-20 17-17-18 PropsDocumento11 pagineRamdump Modem 2021-03-20 17-17-18 PropsДенис ФеофанычNessuna valutazione finora
- U (For A User-Defined User Exit) or S (For A Standard User Exit)Documento10 pagineU (For A User-Defined User Exit) or S (For A Standard User Exit)biltexNessuna valutazione finora
- 18 DiplexorDocumento3 pagine18 DiplexorFernando GutiérrezNessuna valutazione finora
- ECEg 7411 Lecture 2 Power Electronics For Inverter DesignDocumento15 pagineECEg 7411 Lecture 2 Power Electronics For Inverter Designbisrat yeshidagnaNessuna valutazione finora
- Lab4 Nand Schem SimDocumento20 pagineLab4 Nand Schem SimraghuippiliNessuna valutazione finora
- Tableau VM Tuning and Best PracticesDocumento6 pagineTableau VM Tuning and Best Practicessrikanth_4allNessuna valutazione finora
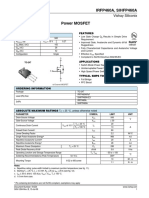
- Vishay IRFP460APBF Datasheet PDFDocumento8 pagineVishay IRFP460APBF Datasheet PDFkamel keddarNessuna valutazione finora