Potrebbero piacerti anche
- ECE 3054: Signals, Systems, and Transforms Lab Manual: I. Selesnick NYU TandonDocumento41 pagineECE 3054: Signals, Systems, and Transforms Lab Manual: I. Selesnick NYU TandonilupfudNessuna valutazione finora
- MATLAB for Beginners: A Gentle Approach - Revised EditionDa EverandMATLAB for Beginners: A Gentle Approach - Revised EditionNessuna valutazione finora
- Modern Control System TutorialDocumento134 pagineModern Control System TutorialUtn LeoNessuna valutazione finora
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Da EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Valutazione: 2.5 su 5 stelle2.5/5 (2)
- EE-232 Lab Manual Signals and SystemsDocumento57 pagineEE-232 Lab Manual Signals and SystemsMuhammad YousafNessuna valutazione finora
- Lab Manual (PROGRAMMING!!)Documento57 pagineLab Manual (PROGRAMMING!!)Zulfiqar MemonNessuna valutazione finora
- Procedure: 1. Introduction To MatlabDocumento6 pagineProcedure: 1. Introduction To MatlabAli ShanNessuna valutazione finora
- Software Toolkit: MATLABDocumento15 pagineSoftware Toolkit: MATLABViha NaikNessuna valutazione finora
- Introduction To Matlab& Signals: Defining A ScalarDocumento10 pagineIntroduction To Matlab& Signals: Defining A ScalarMuhammadAxadKhataabGujjarNessuna valutazione finora
- MATLAB by Examples: BookDocumento9 pagineMATLAB by Examples: BookgkrabhishekNessuna valutazione finora
- Feedback Control Systems Lab ManualDocumento141 pagineFeedback Control Systems Lab Manualanum_sadaf0% (1)
- Introduction To Matlab & Signals: ObjectiveDocumento7 pagineIntroduction To Matlab & Signals: Objectiveعمیر بن اصغرNessuna valutazione finora
- Help Help Help Diary Diary Help Help DemoDocumento2 pagineHelp Help Help Diary Diary Help Help DemoEmad Suliman AbusittaNessuna valutazione finora
- MATLAB Structure and Use: 1.1 Pre-Lab AssignmentDocumento29 pagineMATLAB Structure and Use: 1.1 Pre-Lab AssignmentYu YangNessuna valutazione finora
- Lab # 1Documento11 pagineLab # 1Aaron SamsonNessuna valutazione finora
- ECE2026 Lab00 2015FDocumento6 pagineECE2026 Lab00 2015FOmnipotentEntityNessuna valutazione finora
- Lab Experiment 1: Introduction To MATLAB ObjectivesDocumento3 pagineLab Experiment 1: Introduction To MATLAB ObjectivesPaula Camille PalinoNessuna valutazione finora
- Matlab Basics Commands GuideDocumento30 pagineMatlab Basics Commands Guiderathnam.pmNessuna valutazione finora
- Matlab Review PDFDocumento19 pagineMatlab Review PDFMian HusnainNessuna valutazione finora
- Lab Report MatlabDocumento43 pagineLab Report MatlabRana Hamza Muhammad YousafNessuna valutazione finora
- Lab 1Documento6 pagineLab 1saba rasheedNessuna valutazione finora
- Project Signal System 2012Documento17 pagineProject Signal System 2012Kurniawan Banumaxs NagaNessuna valutazione finora
- Pak-Austria Fachhochschule Institute's MATLAB Lab 1Documento9 paginePak-Austria Fachhochschule Institute's MATLAB Lab 1Usman jadoonNessuna valutazione finora
- Lab01 Introduction To MatlabDocumento7 pagineLab01 Introduction To MatlabSeyed SadeghNessuna valutazione finora
- DSP Lab ManualDocumento132 pagineDSP Lab ManualShahab JavedNessuna valutazione finora
- Programming With MATLAB: Clodomiro Ferreira Aleksei Netsunajev EUIDocumento57 pagineProgramming With MATLAB: Clodomiro Ferreira Aleksei Netsunajev EUIMuhammad AsrofiNessuna valutazione finora
- DSP Lab ManualDocumento57 pagineDSP Lab ManualRabia SamadNessuna valutazione finora
- MatlabSession1 PHAS2441Documento5 pagineMatlabSession1 PHAS2441godkid308Nessuna valutazione finora
- Lab 4Documento8 pagineLab 4hamzaNessuna valutazione finora
- THL - 1 - Ece 4600Documento21 pagineTHL - 1 - Ece 4600Juju JantonNessuna valutazione finora
- Lab 01Documento8 pagineLab 01ALISHBA AZAMNessuna valutazione finora
- Matlab File - Deepak - Yadav - Bca - 4TH - Sem - A50504819015Documento59 pagineMatlab File - Deepak - Yadav - Bca - 4TH - Sem - A50504819015its me Deepak yadavNessuna valutazione finora
- LAB-2 Digital Signal ProcessingDocumento11 pagineLAB-2 Digital Signal ProcessingyohanNessuna valutazione finora
- DSP Lab Manual 2023Documento85 pagineDSP Lab Manual 2023tanujsingal945Nessuna valutazione finora
- Lab1 DSPDocumento15 pagineLab1 DSPAli HassanNessuna valutazione finora
- Introduction to Matlab Functions and PlottingDocumento8 pagineIntroduction to Matlab Functions and PlottingBatool HerzallahNessuna valutazione finora
- 1 Pre-Lab: ELEC2201 Signals & Linear Systems MDocumento7 pagine1 Pre-Lab: ELEC2201 Signals & Linear Systems MPhilip SalmonyNessuna valutazione finora
- Solution For DSP LabDocumento5 pagineSolution For DSP LabVN TranNessuna valutazione finora
- Plotting Signals and Convolutions in MATLABDocumento4 paginePlotting Signals and Convolutions in MATLABMuhammad Usman SaeedNessuna valutazione finora
- EE 105: MATLAB As An Engineer's Problem Solving ToolDocumento3 pagineEE 105: MATLAB As An Engineer's Problem Solving Toolthinkberry22Nessuna valutazione finora
- Math 442 - Introduction to MATLAB in 40 CharactersDocumento28 pagineMath 442 - Introduction to MATLAB in 40 CharactersanastirNessuna valutazione finora
- Matlab Basics Tutorial: VectorsDocumento52 pagineMatlab Basics Tutorial: VectorsMohit Bathla MontyNessuna valutazione finora
- Signal LAb1Documento6 pagineSignal LAb1Nguyen Trung KhanhNessuna valutazione finora
- Dspaceinsimulink PDFDocumento20 pagineDspaceinsimulink PDFmphaniteja2012Nessuna valutazione finora
- Experiment 1Documento39 pagineExperiment 1Usama NadeemNessuna valutazione finora
- Lab1FA11 PDFDocumento11 pagineLab1FA11 PDFaxecaleverNessuna valutazione finora
- EE-232 Signals and Systems Lab ReportDocumento8 pagineEE-232 Signals and Systems Lab ReportJafar HussainNessuna valutazione finora
- LAB-01 EE-311 Signal and Systems PDFDocumento12 pagineLAB-01 EE-311 Signal and Systems PDFAwais AliNessuna valutazione finora
- Lab 2Documento14 pagineLab 2Tahsin Zaman TalhaNessuna valutazione finora
- Mat Labs I Mu Link IntroDocumento14 pagineMat Labs I Mu Link Intros.b.v.seshagiri1407Nessuna valutazione finora
- Matlab Tutorial: Getting Started with Vectors, Matrices, Plots and LoopsDocumento12 pagineMatlab Tutorial: Getting Started with Vectors, Matrices, Plots and Loopsm6muthiNessuna valutazione finora
- MATLAB Introduction for Digital Signal ProcessingDocumento4 pagineMATLAB Introduction for Digital Signal ProcessingArikJuniarNessuna valutazione finora
- Image ProcessingDocumento36 pagineImage ProcessingTapasRoutNessuna valutazione finora
- Lab2 SignalsDocumento4 pagineLab2 SignalsMelih AtaseverNessuna valutazione finora
- TEE 451 - Control SystemsDocumento4 pagineTEE 451 - Control SystemsVu LeNessuna valutazione finora
- Lecture 13 Matlab Octave FreeMat pt1Documento30 pagineLecture 13 Matlab Octave FreeMat pt1navinarsNessuna valutazione finora
- Lab 01 ADocumento7 pagineLab 01 ApathmakerpkNessuna valutazione finora
- Lecture1 MatlabDocumento55 pagineLecture1 Matlabapi-3824811Nessuna valutazione finora
- Lec 09 111Documento246 pagineLec 09 111Anonymous eWMnRr70qNessuna valutazione finora
- NetworksDocumento127 pagineNetworksskchiluka100% (2)
- RehuyDocumento32 pagineRehuyAnonymous eWMnRr70qNessuna valutazione finora
- Update3 160317004923Documento19 pagineUpdate3 160317004923Anonymous eWMnRr70qNessuna valutazione finora
- Advantages of Class B Push Pull Amplifier Over Class ADocumento4 pagineAdvantages of Class B Push Pull Amplifier Over Class AAnonymous eWMnRr70qNessuna valutazione finora
- 3aquine Mccluskeymethod 191016140548Documento33 pagine3aquine Mccluskeymethod 191016140548Anonymous eWMnRr70qNessuna valutazione finora
- 111111111111Documento24 pagine111111111111Anonymous eWMnRr70qNessuna valutazione finora
- 00numbersystems 130119065930 Phpapp01Documento62 pagine00numbersystems 130119065930 Phpapp01Anonymous eWMnRr70qNessuna valutazione finora
- Number Systems Explained in 40 CharactersDocumento25 pagineNumber Systems Explained in 40 CharactersAnonymous eWMnRr70q100% (1)
- Chapter 3 Special Section: Focus On Karnaugh MapsDocumento30 pagineChapter 3 Special Section: Focus On Karnaugh MapsRaja GopalNessuna valutazione finora
- Boolean AlgebraDocumento22 pagineBoolean AlgebraAasthaNessuna valutazione finora
- Fed Short QuestionsDocumento2 pagineFed Short QuestionsAnonymous eWMnRr70qNessuna valutazione finora
- 3ADocumento77 pagine3AGurkaranjot SinghNessuna valutazione finora
- BoolDocumento33 pagineBoolAnonymous eWMnRr70qNessuna valutazione finora
- Vlsi Technology Kec 053 1Documento2 pagineVlsi Technology Kec 053 1Anonymous eWMnRr70qNessuna valutazione finora
- Vlsi Technology Kec 053Documento1 paginaVlsi Technology Kec 053Anonymous eWMnRr70qNessuna valutazione finora
- Temp Dependance of SemiconductorDocumento3 pagineTemp Dependance of SemiconductorAnonymous eWMnRr70qNessuna valutazione finora
- Unit 5 FABRICATION OF DEVICESDocumento28 pagineUnit 5 FABRICATION OF DEVICESAnonymous eWMnRr70qNessuna valutazione finora
- The NOT GateDocumento20 pagineThe NOT GateAnonymous eWMnRr70qNessuna valutazione finora
- JFET and MOSFET quiz with answersDocumento15 pagineJFET and MOSFET quiz with answersAnonymous eWMnRr70qNessuna valutazione finora
- Carrier Densities in SCDocumento29 pagineCarrier Densities in SCNeelam KapoorNessuna valutazione finora
- Fed Question BankDocumento5 pagineFed Question BankAnonymous eWMnRr70qNessuna valutazione finora
- Fed Previous Questions and Answers PDFDocumento60 pagineFed Previous Questions and Answers PDFAnonymous eWMnRr70qNessuna valutazione finora
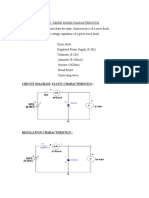
- AIM: - A) To Observe and Draw The Static Characteristics of A Zener DiodeDocumento3 pagineAIM: - A) To Observe and Draw The Static Characteristics of A Zener DiodeAnonymous eWMnRr70qNessuna valutazione finora
- Band DiagramDocumento1 paginaBand DiagramAnonymous eWMnRr70qNessuna valutazione finora
- Diode ApplicationsDocumento22 pagineDiode ApplicationsAnonymous eWMnRr70qNessuna valutazione finora
- TECHNICAL QUIZ EceDocumento7 pagineTECHNICAL QUIZ EceAnonymous eWMnRr70qNessuna valutazione finora
- (A) Structure SpecificationDocumento2 pagine(A) Structure SpecificationAnonymous eWMnRr70qNessuna valutazione finora
- Latex Practice Example PDFDocumento19 pagineLatex Practice Example PDFAnonymous eWMnRr70qNessuna valutazione finora
- Fuzzy Calculus & Possibility Theory1Documento1 paginaFuzzy Calculus & Possibility Theory1Anonymous eWMnRr70qNessuna valutazione finora
- List of Linkages2016Documento74 pagineList of Linkages2016engrwho0% (1)
- Catalog Advantys AS-I IP20-IP67 - 803510 - DIA3ED2040909EN - 200408Documento30 pagineCatalog Advantys AS-I IP20-IP67 - 803510 - DIA3ED2040909EN - 200408Jean MarzanNessuna valutazione finora
- Operation Manual: Daikin Room Air ConditionerDocumento92 pagineOperation Manual: Daikin Room Air ConditionerbenNessuna valutazione finora
- Strength and Insulating Properties of Building Blocks Made From Waste MaterialsDocumento7 pagineStrength and Insulating Properties of Building Blocks Made From Waste Materialsmjrobust05Nessuna valutazione finora
- 49 CFR Ch. I (10-1-11 Edition) 173.318Documento5 pagine49 CFR Ch. I (10-1-11 Edition) 173.318MauricioNessuna valutazione finora
- Foxpro For O LevelDocumento3 pagineFoxpro For O LevelShiv PathakNessuna valutazione finora
- Product Design Recommended Reading ListDocumento3 pagineProduct Design Recommended Reading ListSai Prasath100% (1)
- ZXONE Quick Installation Guide - V1.0Documento56 pagineZXONE Quick Installation Guide - V1.0kmad100% (2)
- Epc of Well Pad D For Sorik Marapi Geothermal Project Recovery ScheduleDocumento1 paginaEpc of Well Pad D For Sorik Marapi Geothermal Project Recovery ScheduleGema SuryaNessuna valutazione finora
- NTP35N15 Power MOSFET Features and SpecificationsDocumento7 pagineNTP35N15 Power MOSFET Features and SpecificationsChristine GomezNessuna valutazione finora
- Department of Mechanical Engineering, Uet Lahore Refrigeration and Air Conditioning LaboratoryDocumento7 pagineDepartment of Mechanical Engineering, Uet Lahore Refrigeration and Air Conditioning LaboratoryTauQeer ShahNessuna valutazione finora
- GaN technology powers bright LEDsDocumento13 pagineGaN technology powers bright LEDsluciowwNessuna valutazione finora
- 1855OME - Instruction Manual - Kinney Oil Mist EliminatorsDocumento15 pagine1855OME - Instruction Manual - Kinney Oil Mist EliminatorsahmedNessuna valutazione finora
- SRDK Cryocooler Service Manual: For Service Personnel OnlyDocumento151 pagineSRDK Cryocooler Service Manual: For Service Personnel OnlyOtávio PagnoncelliNessuna valutazione finora
- EGIG - 10th - Report - Final - 09-03-2018 - v1Documento50 pagineEGIG - 10th - Report - Final - 09-03-2018 - v1Paulo Marcos Cabral JuniorNessuna valutazione finora
- Stokes' theorem simplifies integration of differential formsDocumento6 pagineStokes' theorem simplifies integration of differential formssiriusgrNessuna valutazione finora
- Sap MM LSMWDocumento18 pagineSap MM LSMWMani balan100% (1)
- J 1 B 1211 CCDDocumento3 pagineJ 1 B 1211 CCDRegion 51Nessuna valutazione finora
- IEC CsODESDocumento2 pagineIEC CsODESArun KumarNessuna valutazione finora
- PVT Correlations McCain - ValkoDocumento17 paginePVT Correlations McCain - ValkoAlejandra Maleja RivasNessuna valutazione finora
- VDP08 Technical CatalogueDocumento47 pagineVDP08 Technical CatalogueAdal VeraNessuna valutazione finora
- Carestream DryView 5700 PDFDocumento44 pagineCarestream DryView 5700 PDFJose Quisca100% (1)
- Power and Simplicity: Pace ScientificDocumento16 paginePower and Simplicity: Pace ScientificAnonymous mNQq7ojNessuna valutazione finora
- Customize ADFS sign-in page brandingDocumento4 pagineCustomize ADFS sign-in page brandingmicu0% (1)
- Specification for biodiesel (B100) - ASTM D6751-08Documento1 paginaSpecification for biodiesel (B100) - ASTM D6751-08Alejandra RojasNessuna valutazione finora
- Computaris - Top Testing Suite (Quick Demonstration)Documento10 pagineComputaris - Top Testing Suite (Quick Demonstration)ioana_diaNessuna valutazione finora
- Mixers Towable Concrete Essick EC42S Rev 8 Manual DataId 18822 Version 1Documento84 pagineMixers Towable Concrete Essick EC42S Rev 8 Manual DataId 18822 Version 1Masayu MYusoffNessuna valutazione finora
- Biogas Calculator TemplateDocumento27 pagineBiogas Calculator TemplateAlex Julian-CooperNessuna valutazione finora
- Devoir 2 Arsalan 2SM BIOFDocumento3 pagineDevoir 2 Arsalan 2SM BIOFphytanjaNessuna valutazione finora
- Smart Access 1105Documento12 pagineSmart Access 1105Gerson Freire De Amorim FilhoNessuna valutazione finora
- LIT: Life Ignition Tools: Use Nature's Playbook to Energize Your Brain, Spark Ideas, and Ignite ActionDa EverandLIT: Life Ignition Tools: Use Nature's Playbook to Energize Your Brain, Spark Ideas, and Ignite ActionValutazione: 4 su 5 stelle4/5 (402)
- Mindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessDa EverandMindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessValutazione: 4.5 su 5 stelle4.5/5 (327)
- The Age of Magical Overthinking: Notes on Modern IrrationalityDa EverandThe Age of Magical Overthinking: Notes on Modern IrrationalityValutazione: 4 su 5 stelle4/5 (13)
- The Ultimate Guide To Memory Improvement TechniquesDa EverandThe Ultimate Guide To Memory Improvement TechniquesValutazione: 5 su 5 stelle5/5 (34)
- Techniques Exercises And Tricks For Memory ImprovementDa EverandTechniques Exercises And Tricks For Memory ImprovementValutazione: 4.5 su 5 stelle4.5/5 (40)
- The Ritual Effect: From Habit to Ritual, Harness the Surprising Power of Everyday ActionsDa EverandThe Ritual Effect: From Habit to Ritual, Harness the Surprising Power of Everyday ActionsValutazione: 3.5 su 5 stelle3.5/5 (3)
- Think This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeDa EverandThink This, Not That: 12 Mindshifts to Breakthrough Limiting Beliefs and Become Who You Were Born to BeNessuna valutazione finora
- Summary: The Psychology of Money: Timeless Lessons on Wealth, Greed, and Happiness by Morgan Housel: Key Takeaways, Summary & Analysis IncludedDa EverandSummary: The Psychology of Money: Timeless Lessons on Wealth, Greed, and Happiness by Morgan Housel: Key Takeaways, Summary & Analysis IncludedValutazione: 5 su 5 stelle5/5 (78)
- Outlive: The Science and Art of Longevity by Peter Attia: Key Takeaways, Summary & AnalysisDa EverandOutlive: The Science and Art of Longevity by Peter Attia: Key Takeaways, Summary & AnalysisValutazione: 4 su 5 stelle4/5 (1)
- Why We Die: The New Science of Aging and the Quest for ImmortalityDa EverandWhy We Die: The New Science of Aging and the Quest for ImmortalityValutazione: 3.5 su 5 stelle3.5/5 (2)
- Raising Mentally Strong Kids: How to Combine the Power of Neuroscience with Love and Logic to Grow Confident, Kind, Responsible, and Resilient Children and Young AdultsDa EverandRaising Mentally Strong Kids: How to Combine the Power of Neuroscience with Love and Logic to Grow Confident, Kind, Responsible, and Resilient Children and Young AdultsNessuna valutazione finora
- The Obesity Code: Unlocking the Secrets of Weight LossDa EverandThe Obesity Code: Unlocking the Secrets of Weight LossValutazione: 5 su 5 stelle5/5 (3)
- The Happiness Trap: How to Stop Struggling and Start LivingDa EverandThe Happiness Trap: How to Stop Struggling and Start LivingValutazione: 4 su 5 stelle4/5 (1)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingDa EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingValutazione: 5 su 5 stelle5/5 (4)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingDa EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingValutazione: 3.5 su 5 stelle3.5/5 (31)
- Raising Good Humans: A Mindful Guide to Breaking the Cycle of Reactive Parenting and Raising Kind, Confident KidsDa EverandRaising Good Humans: A Mindful Guide to Breaking the Cycle of Reactive Parenting and Raising Kind, Confident KidsValutazione: 4.5 su 5 stelle4.5/5 (169)
- The Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaDa EverandThe Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Garden Within: Where the War with Your Emotions Ends and Your Most Powerful Life BeginsDa EverandThe Garden Within: Where the War with Your Emotions Ends and Your Most Powerful Life BeginsNessuna valutazione finora
- Summary: Outlive: The Science and Art of Longevity by Peter Attia MD, With Bill Gifford: Key Takeaways, Summary & AnalysisDa EverandSummary: Outlive: The Science and Art of Longevity by Peter Attia MD, With Bill Gifford: Key Takeaways, Summary & AnalysisValutazione: 4.5 su 5 stelle4.5/5 (41)
- The Tennis Partner: A Doctor's Story of Friendship and LossDa EverandThe Tennis Partner: A Doctor's Story of Friendship and LossValutazione: 4.5 su 5 stelle4.5/5 (4)
- Summary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisDa EverandSummary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisValutazione: 5 su 5 stelle5/5 (3)
- Dark Psychology & Manipulation: Discover How To Analyze People and Master Human Behaviour Using Emotional Influence Techniques, Body Language Secrets, Covert NLP, Speed Reading, and Hypnosis.Da EverandDark Psychology & Manipulation: Discover How To Analyze People and Master Human Behaviour Using Emotional Influence Techniques, Body Language Secrets, Covert NLP, Speed Reading, and Hypnosis.Valutazione: 4.5 su 5 stelle4.5/5 (110)
- Summary: Limitless: Upgrade Your Brain, Learn Anything Faster, and Unlock Your Exceptional Life By Jim Kwik: Key Takeaways, Summary and AnalysisDa EverandSummary: Limitless: Upgrade Your Brain, Learn Anything Faster, and Unlock Your Exceptional Life By Jim Kwik: Key Takeaways, Summary and AnalysisValutazione: 5 su 5 stelle5/5 (8)