Potrebbero piacerti anche
- Cone Step MappingDocumento14 pagineCone Step MappingLubosz_Sarneck_1758Nessuna valutazione finora
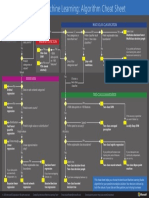
- Microsoft Machine Learning Algorithm Cheat Sheet v2 PDFDocumento1 paginaMicrosoft Machine Learning Algorithm Cheat Sheet v2 PDFamitag007100% (1)
- CS1114 Section 6: ConvolutionDocumento6 pagineCS1114 Section 6: ConvolutionChakshuGroverNessuna valutazione finora
- CS1114: Edge Detection KernelsDocumento6 pagineCS1114: Edge Detection KernelsCristian BasoaltoNessuna valutazione finora
- Hough Circle Detection Using Image Processing TechniquesDocumento28 pagineHough Circle Detection Using Image Processing TechniquesMarwaAlmahmoudNessuna valutazione finora
- SKM4213 C3 Pre-ProcessingDocumento80 pagineSKM4213 C3 Pre-ProcessingIezma MadzinNessuna valutazione finora
- Explain Following Morphological Methods With ExamplesDocumento20 pagineExplain Following Morphological Methods With ExamplesMadhawa HulangamuwaNessuna valutazione finora
- Edge Detection ApplicationsDocumento10 pagineEdge Detection ApplicationsRishikesh ThakurNessuna valutazione finora
- Simple Image Processing Filters in CDocumento4 pagineSimple Image Processing Filters in CChristopher WilliamsNessuna valutazione finora
- FiltersDocumento19 pagineFiltersEo UnNessuna valutazione finora
- Image Denoising: Alexander Kharlamov Victor PodlozhnyukDocumento11 pagineImage Denoising: Alexander Kharlamov Victor PodlozhnyukMikołai AltenbergNessuna valutazione finora
- Blob Detection: - Matching Whole Images - Matching Small Regions - Matching ObjectsDocumento11 pagineBlob Detection: - Matching Whole Images - Matching Small Regions - Matching ObjectsSajal JainNessuna valutazione finora
- Implement Canny Edge Detector in Python Using OpenCVDocumento13 pagineImplement Canny Edge Detector in Python Using OpenCVShresth sahNessuna valutazione finora
- Direct Volume Rendering Ray-casting TechniquesDocumento53 pagineDirect Volume Rendering Ray-casting TechniquesnikhilaNessuna valutazione finora
- Java Image ProcessingDocumento15 pagineJava Image ProcessingVijay Kapanipathi RaoNessuna valutazione finora
- GDC09 Valient Rendering Technology of Killzone 2 Extended Presenter Notes PDFDocumento8 pagineGDC09 Valient Rendering Technology of Killzone 2 Extended Presenter Notes PDFdagushNessuna valutazione finora
- I O CV H - W P: Ntroduction To PEN Ands ON Orkshop in YthonDocumento25 pagineI O CV H - W P: Ntroduction To PEN Ands ON Orkshop in YthonMinh NguyễnNessuna valutazione finora
- Sift Detector and Descriptor: (Scale Invariant Feature Transform)Documento34 pagineSift Detector and Descriptor: (Scale Invariant Feature Transform)Nguyen Viet AnhNessuna valutazione finora
- VB.NET Sobel Edge Detector OptimizationDocumento7 pagineVB.NET Sobel Edge Detector OptimizationMuhar RianaNessuna valutazione finora
- Area/Mask Processing Methods: - What Is A Mask?Documento10 pagineArea/Mask Processing Methods: - What Is A Mask?Roudy FarraneNessuna valutazione finora
- Edge Detection 03Documento36 pagineEdge Detection 03Tekalign TadesseNessuna valutazione finora
- Canny Edge Detection Step by Step ProcessDocumento16 pagineCanny Edge Detection Step by Step Processsonaiya software solutionsNessuna valutazione finora
- Lec 1 PrintDocumento13 pagineLec 1 PrintPolito PogbaNessuna valutazione finora
- NoiseDocumento62 pagineNoisemisbahNessuna valutazione finora
- Camera Models and Image Processing TechniquesDocumento38 pagineCamera Models and Image Processing TechniquesElisa PopNessuna valutazione finora
- Digital Image ProcessingDocumento25 pagineDigital Image ProcessingHatem DheerNessuna valutazione finora
- LAB 05 - DIGITAL IMAGE PROCESSING PRACTICEDocumento9 pagineLAB 05 - DIGITAL IMAGE PROCESSING PRACTICENhật ToànNessuna valutazione finora
- Digital Image FundamentalsDocumento50 pagineDigital Image Fundamentalshussenkago3Nessuna valutazione finora
- SIFTDocumento33 pagineSIFTlogi9361Nessuna valutazione finora
- Otsu Algorithm SegmentationDocumento16 pagineOtsu Algorithm SegmentationAngel Abraham Camacho PazNessuna valutazione finora
- Laboratory 2. Image FilteringDocumento15 pagineLaboratory 2. Image FilteringIulian NeagaNessuna valutazione finora
- Low Complexity Multi-Exposure Image FusionDocumento15 pagineLow Complexity Multi-Exposure Image FusionSriram AtronixNessuna valutazione finora
- Magnify Defocus in Photos with Single Image ProcessingDocumento9 pagineMagnify Defocus in Photos with Single Image ProcessingdefefalienNessuna valutazione finora
- Image Processing Techniques ReportDocumento12 pagineImage Processing Techniques ReportANAND.H.SNessuna valutazione finora
- Basic Image Processing Techniques in OpenCV using PythonDocumento26 pagineBasic Image Processing Techniques in OpenCV using PythonPOORVI JOSHINessuna valutazione finora
- Create Your Own CamScanner Using Python and OpenCVDocumento20 pagineCreate Your Own CamScanner Using Python and OpenCVShirish GuptaNessuna valutazione finora
- Introduction to Image Processing SyllabusDocumento45 pagineIntroduction to Image Processing SyllabusRajeeva_Navada_8112Nessuna valutazione finora
- Direct Volume Rendering (DVR) : Ray-Casting: Mengxia Zhu Fall 2007Documento35 pagineDirect Volume Rendering (DVR) : Ray-Casting: Mengxia Zhu Fall 2007Chim RuồiNessuna valutazione finora
- Image Processing SeminarDocumento48 pagineImage Processing SeminarAnkur SinghNessuna valutazione finora
- filtersCh3_04Documento37 paginefiltersCh3_04okuwobiNessuna valutazione finora
- L5 - Strided Conv, LPF, HPFDocumento111 pagineL5 - Strided Conv, LPF, HPFAgha KazimNessuna valutazione finora
- FODL Unit-4Documento46 pagineFODL Unit-4Anushka JanotiNessuna valutazione finora
- Dip Unit 4Documento58 pagineDip Unit 4sheikdavoodNessuna valutazione finora
- Convolutional Neural Network: Sudeshna Sarkar 22/2/17, 23/2/17, 24/2/17Documento120 pagineConvolutional Neural Network: Sudeshna Sarkar 22/2/17, 23/2/17, 24/2/17Sreenivasareddy DevarapalliNessuna valutazione finora
- Visible-Surface Detection Methods: CS3162 Introduction To Computer GraphicsDocumento10 pagineVisible-Surface Detection Methods: CS3162 Introduction To Computer GraphicsathiraNessuna valutazione finora
- MOTION ESTIMATION AND VIDEO COMPRESSION USING BLOCKSDocumento4 pagineMOTION ESTIMATION AND VIDEO COMPRESSION USING BLOCKSJarjit TandelNessuna valutazione finora
- Chapter3 CVDocumento76 pagineChapter3 CVAschalew AyeleNessuna valutazione finora
- Image Filtering Techniques for Noise Reduction and SharpeningDocumento29 pagineImage Filtering Techniques for Noise Reduction and SharpeningRishikesh PathakNessuna valutazione finora
- Using Very Deep Autoencoders For Content-Based Image RetrievalDocumento7 pagineUsing Very Deep Autoencoders For Content-Based Image RetrievalAditya TiwariNessuna valutazione finora
- Lec 20Documento56 pagineLec 20HK KhanNessuna valutazione finora
- SI Sheet 1 SolDocumento5 pagineSI Sheet 1 Solطاهر محمدNessuna valutazione finora
- 09 Image Filtering Edge Detection 09 PDFDocumento15 pagine09 Image Filtering Edge Detection 09 PDFBarty WaineNessuna valutazione finora
- Chapter 10Documento93 pagineChapter 10SunnyNessuna valutazione finora
- ReportDocumento4 pagineReportapi-360448338Nessuna valutazione finora
- Homomorphic FilteringDocumento5 pagineHomomorphic Filteringadc gamblNessuna valutazione finora
- Siggraph2011 SpecialEffectsWithDepth WithNotesDocumento57 pagineSiggraph2011 SpecialEffectsWithDepth WithNotesMoises Otero SerranoNessuna valutazione finora
- Cnnbasics 171028092801Documento43 pagineCnnbasics 171028092801jayasanthiNessuna valutazione finora
- Diffusion-based Image Filtering: Gaussian Filters Reduce NoiseDocumento45 pagineDiffusion-based Image Filtering: Gaussian Filters Reduce Noisealvarorama6458Nessuna valutazione finora
- Adaptive Filtering in Astronomical Image Processing: Very Deep Convolutional Networks For Large-Scale Image RecognitionDocumento6 pagineAdaptive Filtering in Astronomical Image Processing: Very Deep Convolutional Networks For Large-Scale Image RecognitionKartikeya ChauhanNessuna valutazione finora
- Standard-Slope Integration: A New Approach to Numerical IntegrationDa EverandStandard-Slope Integration: A New Approach to Numerical IntegrationNessuna valutazione finora
- Insertion Sort Bubble Sort Selection SortDocumento31 pagineInsertion Sort Bubble Sort Selection SortDebdyutiPalNessuna valutazione finora
- Introduction To Machine Learning CMU-10701: Hidden Markov ModelsDocumento30 pagineIntroduction To Machine Learning CMU-10701: Hidden Markov Modelsricksant2003Nessuna valutazione finora
- Assignment I OS II AlgorithmsDocumento3 pagineAssignment I OS II AlgorithmsBca bcaNessuna valutazione finora
- Cutting Stock ProblemDocumento30 pagineCutting Stock Problemhemant_0189Nessuna valutazione finora
- AI 0ML Assignment-2Documento7 pagineAI 0ML Assignment-2Dileep KnNessuna valutazione finora
- Final Exam Numerical Analysis Secant MethodDocumento3 pagineFinal Exam Numerical Analysis Secant MethodMarvelous Villafania100% (1)
- BCS-042 Solved Assignment 042 Solved Assignment 042 Solved AssignmentDocumento28 pagineBCS-042 Solved Assignment 042 Solved Assignment 042 Solved AssignmentNaksh MayankNessuna valutazione finora
- Transport and Assignment AnswerDocumento20 pagineTransport and Assignment AnswerRishi Kesan DNessuna valutazione finora
- The Reaper Cock Os Ef F Ect S Summaryguide: Supplem Ent T O Reaper User GuideDocumento58 pagineThe Reaper Cock Os Ef F Ect S Summaryguide: Supplem Ent T O Reaper User GuidelinuspaulNessuna valutazione finora
- Image Stitching Based On Corner DetectionDocumento4 pagineImage Stitching Based On Corner DetectionEditor IJRITCCNessuna valutazione finora
- Euclid Stage 3 Class 2 Notes Algebra 2 (Polynomials and FloorDocumento7 pagineEuclid Stage 3 Class 2 Notes Algebra 2 (Polynomials and FloorHappy Dolphin100% (1)
- 1089 and A Property of 3-Digit NumbersDocumento4 pagine1089 and A Property of 3-Digit NumbersDebdrik DebnathNessuna valutazione finora
- User'S ManualDocumento29 pagineUser'S ManualLegan FernanNessuna valutazione finora
- DIP3E Chapter03 ArtDocumento64 pagineDIP3E Chapter03 ArtThippeswamy KhNessuna valutazione finora
- TEXTURE IMAGE SEGMENTATION USING NEURO EVOLUTIONARY METHODS-a SurveyDocumento5 pagineTEXTURE IMAGE SEGMENTATION USING NEURO EVOLUTIONARY METHODS-a Surveypurushothaman sinivasanNessuna valutazione finora
- Report On Finding The Traffic Flow in The Net of One-Way StreetsDocumento11 pagineReport On Finding The Traffic Flow in The Net of One-Way StreetsArindam MondalNessuna valutazione finora
- Deep Learning and Convolutional Neural Networks ExplainedDocumento42 pagineDeep Learning and Convolutional Neural Networks ExplainedvictorNessuna valutazione finora
- Greedy Layerwise LearningDocumento39 pagineGreedy Layerwise LearningPRATIK GANGAPURWALANessuna valutazione finora
- Penyelidikan Operasi Dengan Sas MTM3044/MTK3714: Operations Research With SasDocumento44 paginePenyelidikan Operasi Dengan Sas MTM3044/MTK3714: Operations Research With SasAliff HaikalNessuna valutazione finora
- Golden Section SearchDocumento6 pagineGolden Section Searchsiti_umrahNessuna valutazione finora
- Zero-Error Data Compression and Huffman CodesDocumento27 pagineZero-Error Data Compression and Huffman Codesah_shaliNessuna valutazione finora
- Cs6402 Design and Analysis of Algorithms Appasami Lecture Notes PDFDocumento161 pagineCs6402 Design and Analysis of Algorithms Appasami Lecture Notes PDFAravindhNessuna valutazione finora
- RVS NUMERICAL METHODS LESSON PLAN FOR ENGINEERINGDocumento3 pagineRVS NUMERICAL METHODS LESSON PLAN FOR ENGINEERINGSaravanan AtthiappanNessuna valutazione finora
- Conjugate Gradient MethodDocumento14 pagineConjugate Gradient MethodYash MenonNessuna valutazione finora
- Factoring Using Common Monomial FactorDocumento26 pagineFactoring Using Common Monomial FactorHappyNessuna valutazione finora
- HW6 SolutionDocumento10 pagineHW6 Solutionrita901112Nessuna valutazione finora
- Video Compression: Dereje Teferi (PHD) Dereje - Teferi@Aau - Edu.EtDocumento26 pagineVideo Compression: Dereje Teferi (PHD) Dereje - Teferi@Aau - Edu.EtdaveNessuna valutazione finora
- Gujarat Technological UniversityDocumento2 pagineGujarat Technological Universityfeyayel990Nessuna valutazione finora
- MTH101A PRACTICE EXERCISE SET 1 (Answers Part 1)Documento3 pagineMTH101A PRACTICE EXERCISE SET 1 (Answers Part 1)Robert NelsonNessuna valutazione finora