Potrebbero piacerti anche
- Digital ElectronicsDocumento41 pagineDigital Electronicsiky77Nessuna valutazione finora
- Readme ANNDocumento5 pagineReadme ANNiky77Nessuna valutazione finora
- GCIC PresentationDocumento11 pagineGCIC Presentationiky77Nessuna valutazione finora
- Observation and Forecast of NO2 Emissions Using Satellite Data of Ghana Presentation1Documento20 pagineObservation and Forecast of NO2 Emissions Using Satellite Data of Ghana Presentation1iky77Nessuna valutazione finora
- Lab 05 eDocumento4 pagineLab 05 eiky77Nessuna valutazione finora
- LLec17 Jitter FFTDocumento2 pagineLLec17 Jitter FFTiky77Nessuna valutazione finora
- MSP430 DLL Developer's GuideDocumento30 pagineMSP430 DLL Developer's Guideiky77Nessuna valutazione finora
- AGSC PowerPoint Oral PresentationDocumento22 pagineAGSC PowerPoint Oral Presentationiky77Nessuna valutazione finora
- Open Loop Amplifier Model and Parameters: The ComparatorDocumento1 paginaOpen Loop Amplifier Model and Parameters: The Comparatoriky77Nessuna valutazione finora
- LLec15 Thermistor ADCDocumento3 pagineLLec15 Thermistor ADCiky77Nessuna valutazione finora
- Lab 7e Preliminary Design and Layout of An Embedded SystemDocumento2 pagineLab 7e Preliminary Design and Layout of An Embedded Systemiky77Nessuna valutazione finora
- Low-Cost 3D Printing ScreenDocumento202 pagineLow-Cost 3D Printing ScreenMilitaru ConstantinNessuna valutazione finora
- Lab 08 eDocumento6 pagineLab 08 eiky77Nessuna valutazione finora
- LabVIEW DSP Module for Rapid Prototyping of Embedded DSP ApplicationsDocumento6 pagineLabVIEW DSP Module for Rapid Prototyping of Embedded DSP Applicationsiky77Nessuna valutazione finora
- PatentsDocumento8 paginePatentsWilliam CañónNessuna valutazione finora
- Lab View Pde ExamplesDocumento17 pagineLab View Pde ExamplesMoisii PaulNessuna valutazione finora
- Lab 05 eDocumento4 pagineLab 05 eiky77Nessuna valutazione finora
- LLec13 SystemsPowerDocumento3 pagineLLec13 SystemsPoweriky77Nessuna valutazione finora
- Lab 3e LCD Alarm Clock Page 3e.1Documento5 pagineLab 3e LCD Alarm Clock Page 3e.1iky77Nessuna valutazione finora
- Lab 04 GDocumento4 pagineLab 04 Giky77Nessuna valutazione finora
- Agito Simulation of Deep Water SystemsDocumento3 pagineAgito Simulation of Deep Water Systemsiky77Nessuna valutazione finora
- Agito Simulation of Deep Water SystemsDocumento3 pagineAgito Simulation of Deep Water Systemsiky77Nessuna valutazione finora
- IntroToPracticalElectronicsMicrocontrollersAndSoftwareDesign PDFDocumento1.014 pagineIntroToPracticalElectronicsMicrocontrollersAndSoftwareDesign PDFumar438098% (46)
- Lab 2f Performance Debugging: GoalsDocumento5 pagineLab 2f Performance Debugging: Goalsiky77Nessuna valutazione finora
- Lab 1e Fixed-Point Output Fall 2010 1e.1Documento8 pagineLab 1e Fixed-Point Output Fall 2010 1e.1iky77Nessuna valutazione finora
- Lab 1e Fixed-Point Output Fall 2010 1e.1Documento8 pagineLab 1e Fixed-Point Output Fall 2010 1e.1iky77Nessuna valutazione finora
- Have thy tools ready. God will find thee workDocumento83 pagineHave thy tools ready. God will find thee workiky77Nessuna valutazione finora
- Interview Etiquettes: Do's and Don'tsDocumento32 pagineInterview Etiquettes: Do's and Don'tsiky77Nessuna valutazione finora
- Expanding West Africa's Offshore Potential at Offshore West Africa 2014Documento24 pagineExpanding West Africa's Offshore Potential at Offshore West Africa 2014iky77Nessuna valutazione finora
- Ghana Gas BrochureDocumento14 pagineGhana Gas Brochureiky77Nessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- A Personality Trait-Based Interactionist Model of Job PerformanceDocumento18 pagineA Personality Trait-Based Interactionist Model of Job PerformanceAlvina AhmedNessuna valutazione finora
- Policarpio 3 - Refresher GEODocumento2 paginePolicarpio 3 - Refresher GEOJohn RoaNessuna valutazione finora
- SiargaoDocumento11 pagineSiargaomalouNessuna valutazione finora
- Mitchell 1986Documento34 pagineMitchell 1986Sara Veronica Florentin CuencaNessuna valutazione finora
- Decision MatrixDocumento12 pagineDecision Matrixrdos14Nessuna valutazione finora
- Engineering Mathematics I - Class Test December 2015Documento6 pagineEngineering Mathematics I - Class Test December 2015Kunal RamnatsingNessuna valutazione finora
- Grammar Booster: Lesson 1Documento1 paginaGrammar Booster: Lesson 1Diana Carolina Figueroa MendezNessuna valutazione finora
- TheMindReader TeaserA WhatDocumento7 pagineTheMindReader TeaserA WhatnakulshenoyNessuna valutazione finora
- Moment Baseplate DesignDocumento10 pagineMoment Baseplate DesignNeil JonesNessuna valutazione finora
- Studies On Diffusion Approach of MN Ions Onto Granular Activated CarbonDocumento7 pagineStudies On Diffusion Approach of MN Ions Onto Granular Activated CarbonInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Philippine Development Plan (Optimized)Documento413 paginePhilippine Development Plan (Optimized)herbertjohn24Nessuna valutazione finora
- 1-7 Least-Square RegressionDocumento23 pagine1-7 Least-Square RegressionRawash Omar100% (1)
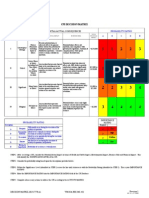
- Fault Tree AnalysisDocumento5 pagineFault Tree AnalysisKrishna Kumar0% (1)
- ATP Draw TutorialDocumento55 pagineATP Draw TutorialMuhammad Majid Altaf100% (3)
- Rhodium Catalyzed Hydroformylation - CH 07Documento14 pagineRhodium Catalyzed Hydroformylation - CH 07maildesantiagoNessuna valutazione finora
- PSPO I Question AnswerDocumento11 paginePSPO I Question AnswerAurélie ROUENessuna valutazione finora
- Sprite Graphics For The Commodore 64Documento200 pagineSprite Graphics For The Commodore 64scottmac67Nessuna valutazione finora
- (MCQ) - Arithmetic ProgressionDocumento5 pagine(MCQ) - Arithmetic Progressionrahul aravindNessuna valutazione finora
- Stereotype Threat Widens Achievement GapDocumento2 pagineStereotype Threat Widens Achievement GapJoeNessuna valutazione finora
- Design Theory: Boo Virk Simon Andrews Boo - Virk@babraham - Ac.uk Simon - Andrews@babraham - Ac.ukDocumento33 pagineDesign Theory: Boo Virk Simon Andrews Boo - Virk@babraham - Ac.uk Simon - Andrews@babraham - Ac.ukuzma munirNessuna valutazione finora
- User Manual: Swift S3Documento97 pagineUser Manual: Swift S3smnguyenNessuna valutazione finora
- Fluorescent sensors for detection of heavy metalsDocumento36 pagineFluorescent sensors for detection of heavy metalskawtherahmedNessuna valutazione finora
- Neptune Sign House AspectDocumento80 pagineNeptune Sign House Aspectmesagirl94% (53)
- Career DevelopmentDocumento23 pagineCareer DevelopmentHaris Khan100% (1)
- Garden Silk Mills Ltd.Documento115 pagineGarden Silk Mills Ltd.jkpatel221Nessuna valutazione finora
- Subject and Power - FoucaultDocumento10 pagineSubject and Power - FoucaultEduardo EspíndolaNessuna valutazione finora
- CIPP ModelDocumento36 pagineCIPP ModelIghfir Rijal TaufiqyNessuna valutazione finora
- Livros Vet LinksDocumento12 pagineLivros Vet LinksÉrica RebeloNessuna valutazione finora
- Learn Six Sigma Process and Methodology BasicsDocumento4 pagineLearn Six Sigma Process and Methodology BasicsGeorge MarkasNessuna valutazione finora
- Roman Questions II PDFDocumento738 pagineRoman Questions II PDFjlinderski100% (3)