Potrebbero piacerti anche
- ECT 300 - Educational Technology - Elab Notes PDFDocumento115 pagineECT 300 - Educational Technology - Elab Notes PDFPrecious100% (1)
- Full Dagbani Dictionary PDFDocumento1.016 pagineFull Dagbani Dictionary PDFFrancisco José Da Silva75% (4)
- Binary OperatorsDocumento10 pagineBinary OperatorsDusko Koscica100% (1)
- Nex-Robotics 20x4 Serial LCD ModuleDocumento9 pagineNex-Robotics 20x4 Serial LCD ModuleAshok Kumar100% (1)
- Datasheet lcd03 20x4 B PDFDocumento8 pagineDatasheet lcd03 20x4 B PDFFrancis100% (1)
- ARM GCC Inline Assembler CookbookDocumento7 pagineARM GCC Inline Assembler CookbookBarryXu100% (1)
- Ch8 ASSEMBLER PDFDocumento11 pagineCh8 ASSEMBLER PDFCôngHoàng100% (2)
- Lab11 CountersDocumento6 pagineLab11 Countersjocansino4496100% (1)
- Advance Screen Operation I. Objectives: Computer System Organization With Assembly LanguageDocumento8 pagineAdvance Screen Operation I. Objectives: Computer System Organization With Assembly LanguageJohn Paulo Ganado100% (1)
- Assembly Language AbreviatedDocumento7 pagineAssembly Language AbreviatedCalvin Ohsey100% (1)
- LCD Screen 8051Documento23 pagineLCD Screen 8051ahimpli100% (2)
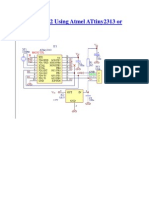
- USB-to-RS232 Using Atmel ATtiny2313 or ATmega8Documento4 pagineUSB-to-RS232 Using Atmel ATtiny2313 or ATmega8mikcomi100% (1)
- 8086 PPTDocumento30 pagine8086 PPTKavitha Subramaniam100% (1)
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Documento7 pagineHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Overview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia TechDocumento7 pagineOverview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia Techdineshvhaval100% (1)
- Interfacing Example - 16 Character X 2 Line LCD: DescriptionDocumento5 pagineInterfacing Example - 16 Character X 2 Line LCD: DescriptionManish Kumar sharma100% (1)
- JHD12864Documento15 pagineJHD12864dravife100% (1)
- Make The Smartpic Serial Programmer: Feature ArticleDocumento5 pagineMake The Smartpic Serial Programmer: Feature Articlersanchez-100% (1)
- Instructions Assembler DirectivespptDocumento22 pagineInstructions Assembler DirectivespptAntra Gurain100% (1)
- HBridgeMotorControl With PICDocumento11 pagineHBridgeMotorControl With PICcoceicr100% (3)
- Sockets Tutorial: The Client Server ModelDocumento14 pagineSockets Tutorial: The Client Server ModelAnant Saraswat100% (1)
- Psd3Xx Chips: by A. Riet JensDocumento3 paginePsd3Xx Chips: by A. Riet JensTariq Zuhluf100% (1)
- Bascom and AVR, RS-232Documento10 pagineBascom and AVR, RS-232akbar100% (1)
- Open Core SpiDocumento13 pagineOpen Core SpiBhanu Pratap Singh100% (1)
- Selecting and Using RS-232, RS-422, and RS-485 Serial Data StandardsDocumento9 pagineSelecting and Using RS-232, RS-422, and RS-485 Serial Data StandardsCarlos Roman Zarza100% (1)
- GDM2004D LCD SpecsheetDocumento9 pagineGDM2004D LCD SpecsheetNico Bellic100% (2)
- Experiment 5 (Modified)Documento8 pagineExperiment 5 (Modified)Mark Sangalang100% (1)
- PC Interfacing LectureDocumento44 paginePC Interfacing LecturePhạm Quốc Dũng100% (1)
- Electronic Meters: Topic 4Documento12 pagineElectronic Meters: Topic 4ltfadhil100% (1)
- LCD - GDM1602BDocumento10 pagineLCD - GDM1602BElanio Julio100% (1)
- Atmel 2575 C Functions For Reading and Writing To Flash Memory ApplicationNote AVR106Documento14 pagineAtmel 2575 C Functions For Reading and Writing To Flash Memory ApplicationNote AVR106Avadhesh100% (1)
- Nec Ir For PicDocumento14 pagineNec Ir For Picsudhakar5472100% (1)
- USB Chip - Choices Jul2000Documento5 pagineUSB Chip - Choices Jul2000Jameskrazy100% (1)
- Nxbyte Arm-Legv8Documento15 pagineNxbyte Arm-Legv8Jonathan Manzaki100% (1)
- AVR Hardware Design ConsiderationsDocumento14 pagineAVR Hardware Design ConsiderationsAmarnath M Damodaran100% (1)
- USB in A NutShellDocumento35 pagineUSB in A NutShellSandro Jairzinho Carrascal Ayora100% (1)
- DS3231 Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description Benefits and FeaturesDocumento20 pagineDS3231 Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description Benefits and Featuresalfian100% (1)
- Introduction I2c and SPIDocumento14 pagineIntroduction I2c and SPIHaris Jeelani100% (1)
- Modbus Protocol UGDocumento33 pagineModbus Protocol UGMuhammad Sa'ad100% (1)
- PS2® To Usb Mouse Translator Hardware DiagramDocumento10 paginePS2® To Usb Mouse Translator Hardware Diagramjhenriqueh100% (1)
- Guia Basica de Ejercicios-ProtonDocumento59 pagineGuia Basica de Ejercicios-ProtonFatality Joseph100% (1)
- Seven-Eleven: Ir NVDocumento3 pagineSeven-Eleven: Ir NVTariq Zuhluf100% (2)
- Elc 2014 Usb 0 PDFDocumento96 pagineElc 2014 Usb 0 PDFAhmed Hamouda100% (1)
- Handling Files in CDocumento6 pagineHandling Files in Capi-3749180100% (1)
- Aerosemi: Features ApplicationsDocumento9 pagineAerosemi: Features Applicationsttnaing100% (1)
- The Semi Colon Is Used at The End of Proc SQL StatementDocumento5 pagineThe Semi Colon Is Used at The End of Proc SQL StatementNagesh Khandare100% (1)
- PIC PPT 13104022 (4th Year)Documento41 paginePIC PPT 13104022 (4th Year)Daman Deep Singh100% (1)
- LCD InfDocumento1 paginaLCD Infkottee1977100% (2)
- E:/#0-2S2017/#1-TEC - SELDI/SAP-02 - Projeto Forno MCU/SELDI - SAP-02 MCU - FW/Forno - DSET-SAP01 - 137-V1.X/forno.hDocumento7 pagineE:/#0-2S2017/#1-TEC - SELDI/SAP-02 - Projeto Forno MCU/SELDI - SAP-02 MCU - FW/Forno - DSET-SAP01 - 137-V1.X/forno.hVinícius Lopes Sampaio100% (1)
- Esp8266 For Epd-Sch092eDocumento1 paginaEsp8266 For Epd-Sch092ejhonatan cock100% (1)
- The Semi Colon Is Used at The End of Proc SQL StatementDocumento5 pagineThe Semi Colon Is Used at The End of Proc SQL StatementOm Prakash100% (1)
- Design and Functional Verification of I2C Master Core Using OVMDocumento6 pagineDesign and Functional Verification of I2C Master Core Using OVMPraveen Kumar100% (1)
- User Guide For TM1637 4 Digits DisplayDocumento4 pagineUser Guide For TM1637 4 Digits Displaymikcomi100% (1)
- Using The TWI Module As I2C MasterDocumento11 pagineUsing The TWI Module As I2C Mastermithrandair100% (1)
- Book PIC Microcontrollers-Chapter 5 CCP ModulesDocumento17 pagineBook PIC Microcontrollers-Chapter 5 CCP ModulesHammamiSalah100% (1)
- A Note On Character LCD DisplaysDocumento11 pagineA Note On Character LCD DisplaysLishan Jayanath100% (2)
- CFD 1st UnitDocumento15 pagineCFD 1st UnitObula Reddy KNessuna valutazione finora
- Lecture 1Documento18 pagineLecture 1mahmoud sadiqNessuna valutazione finora
- Introduction To MATLABDocumento7 pagineIntroduction To MATLABmamdouhmohasebNessuna valutazione finora
- Verilog Course ManualDocumento60 pagineVerilog Course ManualSriramNessuna valutazione finora
- Practice Problems 12Documento32 paginePractice Problems 12suduku007Nessuna valutazione finora
- Low Level Assembly Lang., Machine CodesDocumento10 pagineLow Level Assembly Lang., Machine CodessyukzNessuna valutazione finora
- 4 Mathematical OperationDocumento7 pagine4 Mathematical OperationsyukzNessuna valutazione finora
- 11 - 12 AlarmDocumento6 pagine11 - 12 AlarmsyukzNessuna valutazione finora
- Network CableDocumento14 pagineNetwork Cablesyukz0% (1)
- 6 Going Round in LoopsDocumento10 pagine6 Going Round in LoopssyukzNessuna valutazione finora
- 9 Pointers: Int A, B, C Float X, y Char CHDocumento12 pagine9 Pointers: Int A, B, C Float X, y Char CHsyukzNessuna valutazione finora
- Design MethodologyDocumento11 pagineDesign MethodologysyukzNessuna valutazione finora
- Futsal FormDocumento1 paginaFutsal FormsyukzNessuna valutazione finora
- Ohm'S Law Worksheet: NameDocumento2 pagineOhm'S Law Worksheet: NamesyukzNessuna valutazione finora
- Syarikat Kejuruteraan Sistematik SDN BHDDocumento3 pagineSyarikat Kejuruteraan Sistematik SDN BHDsyukzNessuna valutazione finora
- Electronic Medical Record: Software Engineering Project Group Member: Syukri San Sakinah AmnaniDocumento7 pagineElectronic Medical Record: Software Engineering Project Group Member: Syukri San Sakinah AmnanisyukzNessuna valutazione finora
- Done By: Mohd Syukri Sakinah Noor ND/CST/33Documento18 pagineDone By: Mohd Syukri Sakinah Noor ND/CST/33syukzNessuna valutazione finora
- 02 Requirement EngineeringDocumento51 pagine02 Requirement EngineeringsyukzNessuna valutazione finora
- Advances in Mobile TechnologyDocumento13 pagineAdvances in Mobile TechnologySuleiman AbdulNessuna valutazione finora
- Shakeel Badayuni KalamDocumento9 pagineShakeel Badayuni KalamMohammed Hassan Mohiuddin KhanNessuna valutazione finora
- 6809236236Documento2 pagine6809236236Prabhat YadavNessuna valutazione finora
- Deploying Odoo - Odoo 12.0 DocumentationDocumento13 pagineDeploying Odoo - Odoo 12.0 DocumentationCarlos Lamas0% (1)
- Getting To Know The NAC AnaysisDocumento3 pagineGetting To Know The NAC AnaysisJOHN JOHNNessuna valutazione finora
- Hangul For Dummies, by The Awesome MeDocumento7 pagineHangul For Dummies, by The Awesome MeArnau Adell ManénNessuna valutazione finora
- A Cock & A Cunt - A Love StoryDocumento12 pagineA Cock & A Cunt - A Love StoryNathan DawnNessuna valutazione finora
- Kanz Al Fuqra PDFDocumento126 pagineKanz Al Fuqra PDFshammadrazaNessuna valutazione finora
- Wang Dissertation 2015Documento139 pagineWang Dissertation 2015shivanandkadadiNessuna valutazione finora
- Jones Classical Aerodynamic TheoryDocumento320 pagineJones Classical Aerodynamic TheoryJohn ClistenesNessuna valutazione finora
- XicsstudlomuilDocumento145 pagineXicsstudlomuilabhhieNessuna valutazione finora
- History and Influence of English in The PhilippinesDocumento1 paginaHistory and Influence of English in The PhilippinessuzuechiNessuna valutazione finora
- Chapman, A. - Is Sid Meier's Civilization HistoryDocumento23 pagineChapman, A. - Is Sid Meier's Civilization HistorydserranolozanoNessuna valutazione finora
- Blended Gate Course Schedule: Contact: +91-844-844-0102 DateDocumento27 pagineBlended Gate Course Schedule: Contact: +91-844-844-0102 DateBapiNessuna valutazione finora
- 0587 Bgcse Literature in EnglishDocumento14 pagine0587 Bgcse Literature in EnglishKitso SekotsweNessuna valutazione finora
- Fluxprog 2.0 - Teaching Introductory Programming Using Flowcharts With Real and Simulated Robots For The Brazilian Robotics Olympiad (Obr)Documento6 pagineFluxprog 2.0 - Teaching Introductory Programming Using Flowcharts With Real and Simulated Robots For The Brazilian Robotics Olympiad (Obr)J MrNessuna valutazione finora
- Ran74 - Ip Based Iub For Flexi Wcdma BtsDocumento9 pagineRan74 - Ip Based Iub For Flexi Wcdma BtsgtspauldingNessuna valutazione finora
- Prayer To ST Michael - Long VersionDocumento2 paginePrayer To ST Michael - Long VersionRoxanneMargaretNessuna valutazione finora
- WEEK 4 Design A Web Page Using CSS (Cascading Style Sheets)Documento4 pagineWEEK 4 Design A Web Page Using CSS (Cascading Style Sheets)bhaskar1210510101Nessuna valutazione finora
- Handout 2.1 Early - Literacy - and - Beginning - To - ReadDocumento6 pagineHandout 2.1 Early - Literacy - and - Beginning - To - ReadShagufta MoghalNessuna valutazione finora
- Cryptography in Java,.NET, OSDocumento22 pagineCryptography in Java,.NET, OSMohan MohanbagavathiNessuna valutazione finora
- Thesis About Language Acquisition PDFDocumento8 pagineThesis About Language Acquisition PDFsherrybaileybaltimore100% (2)
- Running Head: Psychology Practioner-Scholar 1: Smarthinking Tutor Response FormDocumento10 pagineRunning Head: Psychology Practioner-Scholar 1: Smarthinking Tutor Response FormAngela BauNessuna valutazione finora
- Bài tập mệnh đề quan hệ (Relative clauses)Documento3 pagineBài tập mệnh đề quan hệ (Relative clauses)C.T. TrườngNessuna valutazione finora
- Iac393 Communicative Chinese 3Documento2 pagineIac393 Communicative Chinese 3api-369747076Nessuna valutazione finora
- How To Use Reference Field On DFFDocumento13 pagineHow To Use Reference Field On DFFsatishNessuna valutazione finora
- Customs of The TagalogsDocumento5 pagineCustoms of The TagalogsShaina Mae CastañedaNessuna valutazione finora
- R FundamentalsDocumento41 pagineR FundamentalsAryan KhannaNessuna valutazione finora