Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- An Analytical Model To Predict The Natural FrequencyDocumento8 pagineAn Analytical Model To Predict The Natural FrequencyLászló AranyNessuna valutazione finora
- Offshore Wind Turbine Foundation Design IssuesDocumento42 pagineOffshore Wind Turbine Foundation Design IssuesLászló AranyNessuna valutazione finora
- Lecture Notes - Analytical MechanicsDocumento43 pagineLecture Notes - Analytical MechanicsLászló AranyNessuna valutazione finora
- Summary Contents: The Future For Monopile & Jacket Pile Connections - Developer & I Nvestor PerspectivesDocumento22 pagineSummary Contents: The Future For Monopile & Jacket Pile Connections - Developer & I Nvestor PerspectivesLászló AranyNessuna valutazione finora
- Foundation Capabilities and Limitations: Offshore Wind Turbine Optimisation SeminarDocumento31 pagineFoundation Capabilities and Limitations: Offshore Wind Turbine Optimisation SeminarLászló AranyNessuna valutazione finora
- Mechanical Model of A Wind TurbineDocumento1 paginaMechanical Model of A Wind TurbineLászló AranyNessuna valutazione finora
- Presentation of Large Rotor StudyDocumento29 paginePresentation of Large Rotor StudyLászló AranyNessuna valutazione finora
- Foundation Models For The Dynamic ResponseDocumento8 pagineFoundation Models For The Dynamic ResponseLászló AranyNessuna valutazione finora
- Final Project: Application of The Control Unit PWM (Pulse Width Modulation)Documento86 pagineFinal Project: Application of The Control Unit PWM (Pulse Width Modulation)László AranyNessuna valutazione finora
- Dynamic Soil-Structure Interaction Issues of Offshore Wind TurbinesDocumento30 pagineDynamic Soil-Structure Interaction Issues of Offshore Wind TurbinesLászló AranyNessuna valutazione finora
- 0847c839-18b3-4e5b-a639-5eab73886f30Documento3 pagine0847c839-18b3-4e5b-a639-5eab73886f30László AranyNessuna valutazione finora
- DavinciDocumento1 paginaDavinciLászló AranyNessuna valutazione finora
- Transverse Vibrations of BeamsDocumento18 pagineTransverse Vibrations of BeamsopnbkNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- ARIIX - Clean - Eating - Easy - Ecipes - For - A - Healthy - Life - Narx PDFDocumento48 pagineARIIX - Clean - Eating - Easy - Ecipes - For - A - Healthy - Life - Narx PDFAnte BaškovićNessuna valutazione finora
- Docket - CDB Batu GajahDocumento1 paginaDocket - CDB Batu Gajahfatin rabiatul adawiyahNessuna valutazione finora
- New Presentation-Group AuditingDocumento23 pagineNew Presentation-Group Auditingrajes wariNessuna valutazione finora
- Celula de CargaDocumento2 pagineCelula de CargaDavid PaezNessuna valutazione finora
- Overlay Control PlansDocumento1 paginaOverlay Control PlansSTS-SPARK GAMINGNessuna valutazione finora
- Worked Solution Paper5 A LevelDocumento8 pagineWorked Solution Paper5 A LevelBhoosan AncharazNessuna valutazione finora
- Zero Tolerance 2010Documento16 pagineZero Tolerance 2010Adrian KozelNessuna valutazione finora
- Fashion DatasetDocumento2.644 pagineFashion DatasetBhawesh DeepakNessuna valutazione finora
- 95-03097 Ballvlv300350 WCB PDFDocumento26 pagine95-03097 Ballvlv300350 WCB PDFasitdeyNessuna valutazione finora
- PRESENTACIÒN EN POWER POINT Futuro SimpleDocumento5 paginePRESENTACIÒN EN POWER POINT Futuro SimpleDiego BenítezNessuna valutazione finora
- Employee of The Month.Documento2 pagineEmployee of The Month.munyekiNessuna valutazione finora
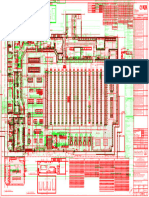
- 02 CT311 Site WorksDocumento26 pagine02 CT311 Site Worksshaweeeng 101Nessuna valutazione finora
- Advanced Herd Health Management, Sanitation and HygieneDocumento28 pagineAdvanced Herd Health Management, Sanitation and Hygienejane entunaNessuna valutazione finora
- OB and Attendance PolicyDocumento2 pagineOB and Attendance PolicyAshna MeiNessuna valutazione finora
- Rapp 2011 TEREOS GBDocumento58 pagineRapp 2011 TEREOS GBNeda PazaninNessuna valutazione finora
- Kootenay Lake Pennywise April 26, 2016Documento48 pagineKootenay Lake Pennywise April 26, 2016Pennywise PublishingNessuna valutazione finora
- Makalah Bahasa Inggris TranslateDocumento14 pagineMakalah Bahasa Inggris TranslatevikaseptideyaniNessuna valutazione finora
- Measuring Road Roughness by Static Level Method: Standard Test Method ForDocumento6 pagineMeasuring Road Roughness by Static Level Method: Standard Test Method ForDannyChaconNessuna valutazione finora
- The New Art of Photographing Nature - ExcerptDocumento15 pagineThe New Art of Photographing Nature - ExcerptCrown Publishing GroupNessuna valutazione finora
- Army Aviation Digest - Apr 1971Documento68 pagineArmy Aviation Digest - Apr 1971Aviation/Space History LibraryNessuna valutazione finora
- 9701 Nos Ps 23Documento5 pagine9701 Nos Ps 23Hubbak KhanNessuna valutazione finora
- Libya AIP Part1Documento145 pagineLibya AIP Part1Hitham Ghwiel100% (1)
- Chronic Renal FailureDocumento54 pagineChronic Renal FailureAkia Cayasan BayaNessuna valutazione finora
- Standard BMW PDFDocumento19 pagineStandard BMW PDFIna IoanaNessuna valutazione finora
- Pen Pal Lesson Plan 3Documento3 paginePen Pal Lesson Plan 3api-664582820Nessuna valutazione finora
- Dist - Propor.danfoss PVG32Documento136 pagineDist - Propor.danfoss PVG32Michal BujaraNessuna valutazione finora
- Kiraan Supply Mesin AutomotifDocumento6 pagineKiraan Supply Mesin Automotifjamali sadatNessuna valutazione finora
- HDO OpeationsDocumento28 pagineHDO OpeationsAtif NadeemNessuna valutazione finora
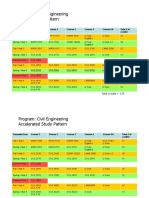
- HKUST 4Y Curriculum Diagram CIVLDocumento4 pagineHKUST 4Y Curriculum Diagram CIVLfrevNessuna valutazione finora
- Stratum CorneumDocumento4 pagineStratum CorneumMuh Firdaus Ar-RappanyNessuna valutazione finora