Potrebbero piacerti anche
- Wireless Mobile Charger Report PDFDocumento16 pagineWireless Mobile Charger Report PDFudaykanth3mudhiraj94% (18)
- Ybus Matrix With Regulating Transformer - Self Study TopicDocumento21 pagineYbus Matrix With Regulating Transformer - Self Study TopicSankar MuthuswamyNessuna valutazione finora
- M-20iA35M Linebuilder Manual en 02Documento7 pagineM-20iA35M Linebuilder Manual en 02Fitra VertikalNessuna valutazione finora
- PACO IE3 MotorDocumento24 paginePACO IE3 Motoriqxca azmyaniNessuna valutazione finora
- Natural Space Vector Modulation in Six-Step Voltage Source InvertersDocumento7 pagineNatural Space Vector Modulation in Six-Step Voltage Source InvertersRonald DeFourNessuna valutazione finora
- Three Phase DC To Ac InverterDocumento44 pagineThree Phase DC To Ac Inverternoor deen100% (1)
- Implementation of Space Vector Pulse Width Modulation Technique On Three Phase Two Level InverterDocumento11 pagineImplementation of Space Vector Pulse Width Modulation Technique On Three Phase Two Level InverterАлексей ЯмаNessuna valutazione finora
- A Five-Level Inverter Voltage Space Phasor Generation For An Open-End Winding Induction Motor DriveDocumento7 pagineA Five-Level Inverter Voltage Space Phasor Generation For An Open-End Winding Induction Motor DriveGanesh ChallaNessuna valutazione finora
- S1. Full Wave Bridge Rectifier - Principle of OperationDocumento7 pagineS1. Full Wave Bridge Rectifier - Principle of OperationVicNessuna valutazione finora
- Novel, Switch, Z-Source Three-Phase InverterDocumento6 pagineNovel, Switch, Z-Source Three-Phase InverterJanjanam PraveenNessuna valutazione finora
- Chapter Six: Poly Phase Ac SystemsDocumento16 pagineChapter Six: Poly Phase Ac SystemsengidawabelNessuna valutazione finora
- Power Electronic Module - Chapter 3Documento34 paginePower Electronic Module - Chapter 3jayxcellNessuna valutazione finora
- Vector Analysis of A Three Phase Stator - OA - WebPgDocumento13 pagineVector Analysis of A Three Phase Stator - OA - WebPgIvan Contrreras QuispeNessuna valutazione finora
- Matlab-Simulink Model Three-Phase Voltage Source InverterDocumento5 pagineMatlab-Simulink Model Three-Phase Voltage Source InverterDương Tấn TàiNessuna valutazione finora
- FQC IISC-250kvaDocumento23 pagineFQC IISC-250kvaDeepak GehlotNessuna valutazione finora
- Sample Ac To AcDocumento6 pagineSample Ac To AcTaniyaNessuna valutazione finora
- 6 and 12 Step InverterDocumento42 pagine6 and 12 Step InverterAparna AkhileshNessuna valutazione finora
- Thevenin PDFDocumento12 pagineThevenin PDFHorvat ZoltánNessuna valutazione finora
- Exp 4 - ZCD, Comparator With Hysteresis (Schmitt Trigger)Documento5 pagineExp 4 - ZCD, Comparator With Hysteresis (Schmitt Trigger)Sharib JalisNessuna valutazione finora
- ELEC4100 Complete NotesDocumento150 pagineELEC4100 Complete NotesShittyUsername2013Nessuna valutazione finora
- Implementation of SVPWM Control On FPGA For Three Phase MATRIX CONVERTERDocumento6 pagineImplementation of SVPWM Control On FPGA For Three Phase MATRIX CONVERTERIDESNessuna valutazione finora
- Space Vector Modulated Three Phase Voltage Source InverterDocumento24 pagineSpace Vector Modulated Three Phase Voltage Source InverterАлексей ЯмаNessuna valutazione finora
- Power ElectronicsDocumento89 paginePower Electronicsneelam sanjeev kumarNessuna valutazione finora
- Space Vector ModulationDocumento3 pagineSpace Vector ModulationMukul DasNessuna valutazione finora
- A Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsDocumento9 pagineA Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsInternational Journal of Engineering Inventions (IJEI)Nessuna valutazione finora
- Assignment 1 TransformerDocumento2 pagineAssignment 1 TransformerGayatri Vedula50% (2)
- DC To Ac Conversion InversionDocumento15 pagineDC To Ac Conversion InversionfxsolomonNessuna valutazione finora
- Design and Analysis of 24 Pulse Ac-Dc Converter: May 2015, Volume 2, Issue 5 JETIR (ISSN-2349-5162)Documento8 pagineDesign and Analysis of 24 Pulse Ac-Dc Converter: May 2015, Volume 2, Issue 5 JETIR (ISSN-2349-5162)anuragpugaliaNessuna valutazione finora
- Controlled Rectifier Single Phase Full WaveDocumento7 pagineControlled Rectifier Single Phase Full WaveJesus BecerraNessuna valutazione finora
- 09 - Chapter 4 Space Vector Pulse Width ModulationDocumento51 pagine09 - Chapter 4 Space Vector Pulse Width ModulationMouli ThirumalasettyNessuna valutazione finora
- Unit 4Documento89 pagineUnit 4Syed MusthafaNessuna valutazione finora
- Statcom Static Synchronous Compensator: Theory, Modeling, ApplicationsDocumento7 pagineStatcom Static Synchronous Compensator: Theory, Modeling, ApplicationsCesario GillasNessuna valutazione finora
- What Is An Inverter?: Classification of InvertersDocumento11 pagineWhat Is An Inverter?: Classification of Invertersayash mohantyNessuna valutazione finora
- Generation of Polyphase VoltageDocumento7 pagineGeneration of Polyphase VoltageDreian Calaoagan PalalayNessuna valutazione finora
- Pulse-Width Modulation (PWM) Techniques: Instructor: Prof. Ali KeyhaniDocumento35 paginePulse-Width Modulation (PWM) Techniques: Instructor: Prof. Ali KeyhaniLuis Enrique Garduño LandazuriNessuna valutazione finora
- CYCLOCONVERTERSDocumento8 pagineCYCLOCONVERTERSBabu EvanceNessuna valutazione finora
- Suggested Practice ProblemsDocumento2 pagineSuggested Practice ProblemsSaikat MallickNessuna valutazione finora
- Chapter Eight: Dc-Ac Conversion: InvertersDocumento57 pagineChapter Eight: Dc-Ac Conversion: InvertersMd NazimNessuna valutazione finora
- B 31290735Documento75 pagineB 31290735chibssa alemayehuNessuna valutazione finora
- SpaceVector PWM InverteDocumento27 pagineSpaceVector PWM InverteShoaib KhizerNessuna valutazione finora
- Chapter 07Documento38 pagineChapter 07Umair Hassan100% (2)
- Power Electronics Book Part 2 PDFDocumento379 paginePower Electronics Book Part 2 PDFHorch Mohamed50% (2)
- Ee366 Chap 5 3Documento29 pagineEe366 Chap 5 3Michael Adu-boahenNessuna valutazione finora
- Voltage Control Methods: External Control of InverterDocumento45 pagineVoltage Control Methods: External Control of InverterTeja VaitlaNessuna valutazione finora
- Electric FundamentalDocumento31 pagineElectric FundamentalKein Huat ChuaNessuna valutazione finora
- Pulse-Width Modulation For Electronic Power ConversionDocumento18 paginePulse-Width Modulation For Electronic Power ConversionPhạm Văn TưởngNessuna valutazione finora
- Space Vector Modulation An IntroductionDocumento10 pagineSpace Vector Modulation An IntroductionJohan LinderNessuna valutazione finora
- A Novel Scheme To Eliminate Common Mode Voltage in Multilevel InvertersDocumento4 pagineA Novel Scheme To Eliminate Common Mode Voltage in Multilevel InvertersJavier MaldonadoNessuna valutazione finora
- Unbalanced 3 PhaseDocumento11 pagineUnbalanced 3 PhaseSherwin AgootNessuna valutazione finora
- Three Phase Ac Voltage ControllerDocumento3 pagineThree Phase Ac Voltage ControllerShubham DixitNessuna valutazione finora
- PWM RectifierDocumento8 paginePWM RectifiersasikalasivakumarNessuna valutazione finora
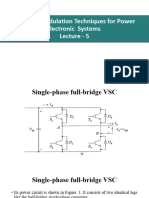
- Lecture 5 - Single Phase Full Bridge VSCDocumento12 pagineLecture 5 - Single Phase Full Bridge VSCAfsal Abdul KarimNessuna valutazione finora
- Analysis Vienna RectifierDocumento8 pagineAnalysis Vienna RectifierJose Luis RomeroNessuna valutazione finora
- Electric Circuit AnalysisDocumento12 pagineElectric Circuit AnalysisMATHANKUMAR.SNessuna valutazione finora
- Power System Analysis and Simulation Question PaperDocumento2 paginePower System Analysis and Simulation Question PaperKeyur PatelNessuna valutazione finora
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDa EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNessuna valutazione finora
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDa EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNessuna valutazione finora
- Foundations of Electromagnetic Compatibility: with Practical ApplicationsDa EverandFoundations of Electromagnetic Compatibility: with Practical ApplicationsNessuna valutazione finora
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetValutazione: 2 su 5 stelle2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNessuna valutazione finora
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Da EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Nessuna valutazione finora
- Chapter 9: Center of Gravity and CentroidDocumento19 pagineChapter 9: Center of Gravity and CentroidNezie Tacay GondalesNessuna valutazione finora
- Effects of Dry Density and Grain Size Distribution On Soil-Water Characteristic Curves of Sandy SoilsDocumento12 pagineEffects of Dry Density and Grain Size Distribution On Soil-Water Characteristic Curves of Sandy SoilsmazharNessuna valutazione finora
- Veer Surendra Sai University of Technology:Orissa: Syllabus For First Year B.TechDocumento24 pagineVeer Surendra Sai University of Technology:Orissa: Syllabus For First Year B.TechSohamsi BeheraNessuna valutazione finora
- Evaporation-Rate For Swimming PoolDocumento5 pagineEvaporation-Rate For Swimming PoolNelson VargasNessuna valutazione finora
- Impeller Vortex ApparatusDocumento2 pagineImpeller Vortex ApparatusGenesis GendranoNessuna valutazione finora
- Montalk - Dimensional Shift - The Physics of 2012 - Fringe ScienceDocumento4 pagineMontalk - Dimensional Shift - The Physics of 2012 - Fringe ScienceKamal HasanNessuna valutazione finora
- Magnetic properties of hematite (α − Fe2O3) nanoparticles synthesized by sol-gel synthesis method: The influence of particle size and particle size distributionDocumento7 pagineMagnetic properties of hematite (α − Fe2O3) nanoparticles synthesized by sol-gel synthesis method: The influence of particle size and particle size distributionMiodrag FilipovićNessuna valutazione finora
- Subject: Quality Management: Reliability Evaluation ModelsDocumento8 pagineSubject: Quality Management: Reliability Evaluation ModelsMayank kumawatNessuna valutazione finora
- GTE Micro Project 4th SemDocumento6 pagineGTE Micro Project 4th SemNishikant Bhure100% (3)
- Chapter 12 Notes Gas Laws NotesDocumento2 pagineChapter 12 Notes Gas Laws NotesNancy Richardson RollinsNessuna valutazione finora
- JChemEduc 1983 60 112-116Documento5 pagineJChemEduc 1983 60 112-116Beto RodriguezNessuna valutazione finora
- PP On 132/33 KV Sub-Station at Mohaddipur GorakhpurDocumento17 paginePP On 132/33 KV Sub-Station at Mohaddipur GorakhpurAbrar Ahmad63% (8)
- B. Eng (Hons) Chemical Engineering: Course OutlineDocumento9 pagineB. Eng (Hons) Chemical Engineering: Course OutlinemarkNessuna valutazione finora
- Vertical Breakwaters PDFDocumento80 pagineVertical Breakwaters PDFMonika Nathawat na18b027Nessuna valutazione finora
- Chapter 3 Spatial Descriptions and Transformations PDFDocumento33 pagineChapter 3 Spatial Descriptions and Transformations PDFOmar AL JabaiNessuna valutazione finora
- Determination and Enlarging of The Acoustic Sweet-Spot in An AuditoriumDocumento4 pagineDetermination and Enlarging of The Acoustic Sweet-Spot in An AuditoriumInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Spreading Dynamics of Polymer Nanodroplets: Sandia National Laboratories, Albuquerque, New Mexico 87185, USADocumento10 pagineSpreading Dynamics of Polymer Nanodroplets: Sandia National Laboratories, Albuquerque, New Mexico 87185, USAmh123456789Nessuna valutazione finora
- Heat and ThermodynamicsDocumento15 pagineHeat and ThermodynamicsYasir KhanNessuna valutazione finora
- Final 08 Engg SolDocumento6 pagineFinal 08 Engg SolyanelaNessuna valutazione finora
- What Is Matrix EnergeticsDocumento3 pagineWhat Is Matrix EnergeticsJill Paxton100% (1)
- Cambridge International AS & A Level: PHYSICS 9702/42Documento24 pagineCambridge International AS & A Level: PHYSICS 9702/42Gulnur KenzheevaNessuna valutazione finora
- Separator Sizing SpreadsheetDocumento40 pagineSeparator Sizing SpreadsheetWalid Ben Husein100% (2)
- DVV TDocumento6 pagineDVV TLiviu ToaderNessuna valutazione finora
- Improved Prediction of Long-Term Prestress Loss in Unbonded Prestressed Concrete MembersDocumento15 pagineImproved Prediction of Long-Term Prestress Loss in Unbonded Prestressed Concrete MembersYork ZengNessuna valutazione finora
- Dalton's Law of Partial PressureDocumento19 pagineDalton's Law of Partial PressureAbdur RehmanNessuna valutazione finora
- First Year Handout March 2021Documento112 pagineFirst Year Handout March 2021King MegaNessuna valutazione finora
- Transgressing The BoundariesDocumento24 pagineTransgressing The BoundariesRandolph DibleNessuna valutazione finora