Potrebbero piacerti anche
- 3 Analytical Kinematics-Bom.1Documento12 pagine3 Analytical Kinematics-Bom.1Erilson BarbosaNessuna valutazione finora
- Inverse Kinematics of Robotic Manipulators ExplainedDocumento22 pagineInverse Kinematics of Robotic Manipulators ExplainedAchu BalachandranNessuna valutazione finora
- Week 5 PDFDocumento25 pagineWeek 5 PDFABDULLAH AAMIRNessuna valutazione finora
- Kinematic Position AnalysisDocumento56 pagineKinematic Position AnalysispgvijayanandNessuna valutazione finora
- Acceleration Analysis Mechanisms Compute ComponentsDocumento29 pagineAcceleration Analysis Mechanisms Compute ComponentsGloria Trigoso LeónNessuna valutazione finora
- Velocity Analysis of LinkagesDocumento23 pagineVelocity Analysis of Linkagesaddisudagne67% (3)
- Chapter IIIDocumento52 pagineChapter IIIsaxadi4814Nessuna valutazione finora
- 5 LinesDocumento16 pagine5 Linesamanda_edithNessuna valutazione finora
- MAE 375 Analytical Linkage Synthesis: Chapter 5 Lecture NotesDocumento50 pagineMAE 375 Analytical Linkage Synthesis: Chapter 5 Lecture NotesMan ElNessuna valutazione finora
- MVT, Tangent and Normal, Rate of MeasureDocumento2 pagineMVT, Tangent and Normal, Rate of MeasureVishal JalanNessuna valutazione finora
- Investigating Parametric Equations in Motion ProblemsDocumento16 pagineInvestigating Parametric Equations in Motion ProblemsByron JimenezNessuna valutazione finora
- Velocity AnalysisDocumento38 pagineVelocity AnalysisChatur LingamNessuna valutazione finora
- Lab 2 - Freudenstein Method For 4-Bar SynthesisDocumento2 pagineLab 2 - Freudenstein Method For 4-Bar SynthesisSuper FreakNessuna valutazione finora
- Unit Circle PowerpointDocumento44 pagineUnit Circle Powerpointboostoberoi100% (1)
- Solutions To Homework Assignment 1: 36-462 January 2009Documento12 pagineSolutions To Homework Assignment 1: 36-462 January 2009Mainak ChatterjeeNessuna valutazione finora
- Numerical Solutions of Second-Orderdifferential Equationsby Adam Bashforth MethodDocumento5 pagineNumerical Solutions of Second-Orderdifferential Equationsby Adam Bashforth MethodAJER JOURNALNessuna valutazione finora
- Annals Mechanical Engineering 2010 A27Documento6 pagineAnnals Mechanical Engineering 2010 A27Navya VadlamuriNessuna valutazione finora
- AnGeom Bridging 3Documento9 pagineAnGeom Bridging 3blackmasqueNessuna valutazione finora
- Hula HoopDocumento10 pagineHula HoopThipok Ben Rak-amnouykitNessuna valutazione finora
- Investigations OscDocumento26 pagineInvestigations Oscbecca3189Nessuna valutazione finora
- A Numerical Approach For Solving Nonlinear Boundary Value Problems in Finite Domain Using Spline Collocation MethodDocumento4 pagineA Numerical Approach For Solving Nonlinear Boundary Value Problems in Finite Domain Using Spline Collocation MethodIJIRSTNessuna valutazione finora
- Kinematics of Rigid BodiesDocumento75 pagineKinematics of Rigid BodiesKelvinNessuna valutazione finora
- Polar Coordinate GraphsDocumento19 paginePolar Coordinate GraphseclairezNessuna valutazione finora
- Three-Dimensional Kinematics of Rigid Bodies: Hiroki OkuboDocumento2 pagineThree-Dimensional Kinematics of Rigid Bodies: Hiroki OkuboViraj GaonkarNessuna valutazione finora
- VELOCITY AND ACCELERATION ANALYSISDocumento60 pagineVELOCITY AND ACCELERATION ANALYSIStarasasankaNessuna valutazione finora
- Compliant Motion SimmulationDocumento17 pagineCompliant Motion SimmulationIvan AvramovNessuna valutazione finora
- Structural Dynamic Analysis of Cyclic Symmetric Structures: Senior Systems Engineer, SAIC, Huntsville, AL 35806Documento26 pagineStructural Dynamic Analysis of Cyclic Symmetric Structures: Senior Systems Engineer, SAIC, Huntsville, AL 35806Silvia BertiNessuna valutazione finora
- KOM Lect6Documento15 pagineKOM Lect6Pranav C PNessuna valutazione finora
- Math Question Bank Class XDocumento8 pagineMath Question Bank Class XSunil ShrivastavaNessuna valutazione finora
- Model Exam Unit 6Documento1 paginaModel Exam Unit 6PATRICIA SELMA MUÑOZNessuna valutazione finora
- Transmission Optimization of Spatial 4-Link Mechanisms'T"Documento21 pagineTransmission Optimization of Spatial 4-Link Mechanisms'T"Omer SenNessuna valutazione finora
- Year - Straight Lines & Pair of Straight Lines: Ambition + LearnerDocumento93 pagineYear - Straight Lines & Pair of Straight Lines: Ambition + Learnergaurav nigamNessuna valutazione finora
- Difference Equations in Normed Spaces: Stability and OscillationsDa EverandDifference Equations in Normed Spaces: Stability and OscillationsNessuna valutazione finora
- On Rotationally Symmetric Above An Infinite Rotating Disk: by J. BodonyiDocumento10 pagineOn Rotationally Symmetric Above An Infinite Rotating Disk: by J. BodonyiKayvan SadeghyNessuna valutazione finora
- Straigth Line Theory - EDocumento24 pagineStraigth Line Theory - EthinkiitNessuna valutazione finora
- Grade 8 Math: Cartesian Coordinate System & Linear EquationsDocumento75 pagineGrade 8 Math: Cartesian Coordinate System & Linear EquationsDame YooheeNessuna valutazione finora
- Part I Analytic Geometry Straight LineDocumento12 paginePart I Analytic Geometry Straight LineicbbattadNessuna valutazione finora
- Curve FittingDocumento37 pagineCurve FittingToddharris100% (4)
- Lecture 2 - Kinematics of Mechanisms 2Documento13 pagineLecture 2 - Kinematics of Mechanisms 2John KimaniNessuna valutazione finora
- Marko Radovanovic Complex Numbers in GeometryDocumento53 pagineMarko Radovanovic Complex Numbers in Geometrymaraujo68Nessuna valutazione finora
- L9-High Pressure VLE - EOSDocumento79 pagineL9-High Pressure VLE - EOS13670319Nessuna valutazione finora
- B-Splines Addition: o 1 N o 1 MDocumento4 pagineB-Splines Addition: o 1 N o 1 MNikhilVasudevanNessuna valutazione finora
- Slotted Link Mechanism SHM ExperimentDocumento6 pagineSlotted Link Mechanism SHM ExperimentShawn Waltz50% (2)
- Dense Linear SystemsDocumento7 pagineDense Linear SystemsJustin BrockNessuna valutazione finora
- Anholonomic Frames, Generalized Killing Equations, and Anisotropic Taub NUT Spinning SpacesDocumento26 pagineAnholonomic Frames, Generalized Killing Equations, and Anisotropic Taub NUT Spinning SpacesSergiu VacaruNessuna valutazione finora
- (1972) A Method FOR IMPROVING THE ESTIMATION OF MEMBRANE FREQUENCIESDocumento10 pagine(1972) A Method FOR IMPROVING THE ESTIMATION OF MEMBRANE FREQUENCIESMohammad AshrafyNessuna valutazione finora
- Trigonometric Functions of Any Angle DefinitionsDocumento11 pagineTrigonometric Functions of Any Angle DefinitionsjayanthnaNessuna valutazione finora
- Cartesian coordinate geometryDocumento24 pagineCartesian coordinate geometryAditya Bansal100% (1)
- Pags. 24-27Documento9 paginePags. 24-27Juan M. Agosto TorresNessuna valutazione finora
- Ducto CuadradoDocumento7 pagineDucto CuadradoJosue RamiresNessuna valutazione finora
- Lesson 09Documento6 pagineLesson 09Sachin ShendeNessuna valutazione finora
- Three Dimensional Geometry: Coordinate of A Point in SpaceDocumento35 pagineThree Dimensional Geometry: Coordinate of A Point in SpacethinkiitNessuna valutazione finora
- Part VI Printer - ImpDocumento21 paginePart VI Printer - ImpRahul Kumar KNessuna valutazione finora
- Applied Calculus Teaching PlanDocumento39 pagineApplied Calculus Teaching PlanbigbangmelvanNessuna valutazione finora
- CH 10 Straight LinesDocumento64 pagineCH 10 Straight LinesDiyha Choudhury100% (1)
- Lectures on Differential Equations. (AM-14), Volume 14Da EverandLectures on Differential Equations. (AM-14), Volume 14Nessuna valutazione finora
- Normal Two-Dimensional Singularities. (AM-71), Volume 71Da EverandNormal Two-Dimensional Singularities. (AM-71), Volume 71Nessuna valutazione finora
- Report Finite ElementDocumento10 pagineReport Finite ElementEl JulaibibNessuna valutazione finora
- Report Finite ElementDocumento10 pagineReport Finite ElementEl JulaibibNessuna valutazione finora
- Report Finite ElementDocumento10 pagineReport Finite ElementEl JulaibibNessuna valutazione finora
- Pronunciation of Family Names: K Sound As in "Call."Documento2 paginePronunciation of Family Names: K Sound As in "Call."El JulaibibNessuna valutazione finora
- Compare 316 Stainless SteelDocumento1 paginaCompare 316 Stainless SteelEl JulaibibNessuna valutazione finora
- Pronunciation of Family Names: K Sound As in "Call."Documento2 paginePronunciation of Family Names: K Sound As in "Call."El JulaibibNessuna valutazione finora
- Pronunciation of Family Names: K Sound As in "Call."Documento2 paginePronunciation of Family Names: K Sound As in "Call."El JulaibibNessuna valutazione finora
- Report Finite ElementDocumento10 pagineReport Finite ElementEl JulaibibNessuna valutazione finora
- Slide 8 BDA 40303-Heat Transfer IZDocumento10 pagineSlide 8 BDA 40303-Heat Transfer IZEl JulaibibNessuna valutazione finora
- Flare SystemDocumento29 pagineFlare Systemvikkoo7100% (4)
- Dehumidifcation and CoolingDocumento3 pagineDehumidifcation and CoolingWaleed A. ShreimNessuna valutazione finora
- Thermography ReportDocumento9 pagineThermography ReportsandrositohangNessuna valutazione finora
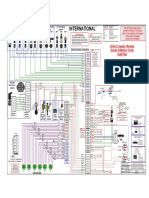
- Esquema Elétrico NGD 9.3 PDFDocumento2 pagineEsquema Elétrico NGD 9.3 PDFluiskovalchukNessuna valutazione finora
- Hybrid Vehicles: Definitions: System Tipical Sample RemarksDocumento1 paginaHybrid Vehicles: Definitions: System Tipical Sample RemarksLyan JonesNessuna valutazione finora
- Ejercicios de ConfiabilidadDocumento3 pagineEjercicios de ConfiabilidadIvan Jose HerreraNessuna valutazione finora
- Chapter 2Documento35 pagineChapter 2Eba GetachewNessuna valutazione finora
- CDI 6: Fire Behavior and Arson Investigation ExamDocumento3 pagineCDI 6: Fire Behavior and Arson Investigation ExamRyan PelayreNessuna valutazione finora
- Z2000 Modulating Zone Comfort System Control PanelDocumento4 pagineZ2000 Modulating Zone Comfort System Control PanelibrahimsirpiNessuna valutazione finora
- Pump ScheduleDocumento1 paginaPump ScheduleZUCEL ARLLETTE MAJUS CASTANEDANessuna valutazione finora
- Kirloskar SP 3HH Leaflet (A)Documento2 pagineKirloskar SP 3HH Leaflet (A)Imran_firdousiNessuna valutazione finora
- Assignment QuestionDocumento15 pagineAssignment QuestionPratik WalimbeNessuna valutazione finora
- Gear TrainsDocumento16 pagineGear Trainsraju100% (1)
- DP09toc PDFDocumento1 paginaDP09toc PDFNerio CanadellNessuna valutazione finora
- Combination Tool WFTDocumento11 pagineCombination Tool WFTCarlos HolguinNessuna valutazione finora
- 1.C.1 Limitations On The Work That Can Be Supplied by A Heat EngineDocumento30 pagine1.C.1 Limitations On The Work That Can Be Supplied by A Heat EnginekamsNessuna valutazione finora
- 032 Aeroplane Performance (JAA ATPL Theory)Documento429 pagine032 Aeroplane Performance (JAA ATPL Theory)dforceman0% (1)
- Archimedes PrincipleDocumento4 pagineArchimedes Principleraviteja036Nessuna valutazione finora
- Gear BoxDocumento14 pagineGear Boxarackalfrancis0% (1)
- Built Up SectionsDocumento2 pagineBuilt Up Sectionslisan2053Nessuna valutazione finora
- Experiment # 10Documento4 pagineExperiment # 10Usama0% (1)
- Positive Displacement PumpDocumento43 paginePositive Displacement Pumpvenkeeku100% (2)
- Box Transferring MCDocumento14 pagineBox Transferring MCBhuvnesh VermaNessuna valutazione finora
- Hvac NotesDocumento9 pagineHvac NotesMegha SinghNessuna valutazione finora
- 6.7L Cummins Maintenance Schedule & Service InformationDocumento3 pagine6.7L Cummins Maintenance Schedule & Service InformationNick Brady100% (1)
- 4-Sided Planer & Moulder Operation Manual: For Spares and Service ContactDocumento48 pagine4-Sided Planer & Moulder Operation Manual: For Spares and Service ContactAlfred TsuiNessuna valutazione finora
- Syngas Gas Train Schematic and Spare Parts ListDocumento4 pagineSyngas Gas Train Schematic and Spare Parts ListShamshuddin TanekhanNessuna valutazione finora
- Service Kit: Single EngineDocumento6 pagineService Kit: Single EngineKJ DhimanNessuna valutazione finora
- 2011, Ongoing Aspects in Geotechnical Engineering, O. Leibniz, S. Semprich, K. Gell PDFDocumento135 pagine2011, Ongoing Aspects in Geotechnical Engineering, O. Leibniz, S. Semprich, K. Gell PDFVasile BudaNessuna valutazione finora
- How VVT and Variable Lift Improve Engine PerformanceDocumento32 pagineHow VVT and Variable Lift Improve Engine PerformanceumairNessuna valutazione finora