Potrebbero piacerti anche
- Matriz de Marco LógicoDocumento2 pagineMatriz de Marco LógicoJoss Gallegos100% (1)
- Proyecto-Embotelladora 2Documento30 pagineProyecto-Embotelladora 2Joss Gallegos0% (1)
- 49,92 Valor A PagarDocumento1 pagina49,92 Valor A PagarqueenieNessuna valutazione finora
- Matriz de Marco LógicoDocumento2 pagineMatriz de Marco LógicoJoss Gallegos100% (1)
- PLC Proceso PLC SensoresDocumento8 paginePLC Proceso PLC SensoresJoss GallegosNessuna valutazione finora
- Proyecto Ayala Gallegos RojasDocumento14 pagineProyecto Ayala Gallegos RojasJoss GallegosNessuna valutazione finora
- Matriz de Marco LógicoDocumento2 pagineMatriz de Marco LógicoJoss Gallegos100% (1)
- Controlador PID AnalogicoDocumento2 pagineControlador PID AnalogicoJuan Garcia VillaNessuna valutazione finora
- Consultas 2do ParcialDocumento3 pagineConsultas 2do ParcialJoss GallegosNessuna valutazione finora
- Fuentes HIDDocumento33 pagineFuentes HIDJoss GallegosNessuna valutazione finora
- Sistema TegumentarioDocumento27 pagineSistema TegumentarioJoss GallegosNessuna valutazione finora
- Modelo Convenio de Pasantía - IndividualDocumento2 pagineModelo Convenio de Pasantía - IndividualJoss GallegosNessuna valutazione finora
- INFORME Mi Amigo DivinoDocumento3 pagineINFORME Mi Amigo DivinoJoss GallegosNessuna valutazione finora
- Laboratorio 9 Circuitos DigitalesDocumento3 pagineLaboratorio 9 Circuitos DigitalesJoss GallegosNessuna valutazione finora
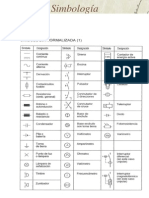
- Simbología y Esquemas.Documento24 pagineSimbología y Esquemas.Efren ZamoraNessuna valutazione finora
- Contact OresDocumento9 pagineContact OresJoss GallegosNessuna valutazione finora
- Laboratorio TIMER PLCDocumento4 pagineLaboratorio TIMER PLCJoss GallegosNessuna valutazione finora
- Ejercicio 2.1 PLC 2256Documento4 pagineEjercicio 2.1 PLC 2256Joss GallegosNessuna valutazione finora
- Simulacion Comunicaciones Modulador AmDocumento14 pagineSimulacion Comunicaciones Modulador AmJoss GallegosNessuna valutazione finora
- Laboratorio 33 Comparacion Equipo 6 PLCDocumento5 pagineLaboratorio 33 Comparacion Equipo 6 PLCJoss GallegosNessuna valutazione finora
- PamDocumento59 paginePamJoss GallegosNessuna valutazione finora
- Arias, Gallegos, Procel Control Por Triacs 2494Documento9 pagineArias, Gallegos, Procel Control Por Triacs 2494Joss GallegosNessuna valutazione finora
- Practik 6Documento6 paginePractik 6Joss GallegosNessuna valutazione finora
- Procesamiento de ImagenesDocumento6 pagineProcesamiento de ImagenesJoss GallegosNessuna valutazione finora
- Modulador AMDocumento11 pagineModulador AMJoss GallegosNessuna valutazione finora
- ENERGÍADocumento1 paginaENERGÍAJoss GallegosNessuna valutazione finora
- Arias, Gallegos, Procel - Preparatorio Control de Motor DC - 2494Documento7 pagineArias, Gallegos, Procel - Preparatorio Control de Motor DC - 2494Joss GallegosNessuna valutazione finora
- King, Martin LutherDocumento9 pagineKing, Martin LutherJoss GallegosNessuna valutazione finora
- Caso 18 Pag 70 Ud 3Documento1 paginaCaso 18 Pag 70 Ud 3Martina Asín CortésNessuna valutazione finora
- Memoria Descriptiva Instalaciones SanitariasDocumento12 pagineMemoria Descriptiva Instalaciones SanitariasIngIngNessuna valutazione finora
- Semana8 Sep 2012iitensionesssDocumento14 pagineSemana8 Sep 2012iitensionesssIoel QcNessuna valutazione finora
- Unidad 1. La Actividad Comercial de Las EmpresasDocumento4 pagineUnidad 1. La Actividad Comercial de Las EmpresasbeatriztalaNessuna valutazione finora
- Areas de Las Principales Figuras Geometricas para Segundo de SecundariaDocumento5 pagineAreas de Las Principales Figuras Geometricas para Segundo de SecundariaAntonioNessuna valutazione finora
- CristalizacionDocumento105 pagineCristalizacion245812Nessuna valutazione finora
- DABOTEWBPD2WDocumento14 pagineDABOTEWBPD2Wvideoric8867Nessuna valutazione finora
- Planificacion de Artes Visuales 1 BasicoDocumento49 paginePlanificacion de Artes Visuales 1 BasicoKaren Hernández Siebald90% (30)
- Buena Vidente en La Puebla de Alfindén - Eduardo Tarot Vidente Y Tarotista El Mejor de La ActualidadDocumento2 pagineBuena Vidente en La Puebla de Alfindén - Eduardo Tarot Vidente Y Tarotista El Mejor de La ActualidadHoroscopoNessuna valutazione finora
- Algunos Aportes de Mario Crocco A La Neurobiología y Psicofísica - Contreras, Norberto C. - Rueda Editores (2014)Documento162 pagineAlgunos Aportes de Mario Crocco A La Neurobiología y Psicofísica - Contreras, Norberto C. - Rueda Editores (2014)JournalEditor100% (1)
- Un Viaje A Través de La NaturalezaDocumento2 pagineUn Viaje A Través de La NaturalezaAbraham Cruz HuamanNessuna valutazione finora
- Curso de TigDocumento16 pagineCurso de TigAlejandro Macias100% (6)
- Costos de ManufacturaDocumento66 pagineCostos de ManufacturaWiliam ParedesNessuna valutazione finora
- Trastorno Del Espectro AutistaDocumento8 pagineTrastorno Del Espectro AutistaCata EtcheverryNessuna valutazione finora
- Taller Mecanico Informe CascoDocumento14 pagineTaller Mecanico Informe CascoAriel ChafuelanNessuna valutazione finora
- Advanced Exoskeleton Arm v2.6Documento11 pagineAdvanced Exoskeleton Arm v2.6MasterAnimusNessuna valutazione finora
- 02 FP - Gastos PublicosDocumento8 pagine02 FP - Gastos Publicosluva34Nessuna valutazione finora
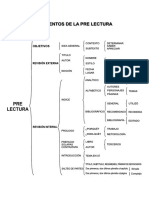
- Elementos de La Pre LecturaDocumento1 paginaElementos de La Pre LecturaFernando YzfNessuna valutazione finora
- Arotherm Split Manual de Usuario Unidad Interior MH 8kw 1627285 1Documento72 pagineArotherm Split Manual de Usuario Unidad Interior MH 8kw 1627285 1Inmaculada AsensioNessuna valutazione finora
- Ficha Certificacion Sanitaria Restaurantes Servicios AfinesDocumento6 pagineFicha Certificacion Sanitaria Restaurantes Servicios AfinesGime PNessuna valutazione finora
- Relación IntraarcadaDocumento20 pagineRelación Intraarcadacamila0% (1)
- Informacion General PF Regular PF 84 PDFDocumento6 pagineInformacion General PF Regular PF 84 PDFCristóbal Ramos GuerreroNessuna valutazione finora
- Recetario Ensaladas de Verano PDFDocumento21 pagineRecetario Ensaladas de Verano PDFLaurasanzgarcia23Nessuna valutazione finora
- Transacciones en Moneda ExtranjeraDocumento17 pagineTransacciones en Moneda Extranjerajuan carlos torres garcíaNessuna valutazione finora
- Aviso - Operacion - Delicias Donde Katin - CHITRÉ (CABECERA)Documento1 paginaAviso - Operacion - Delicias Donde Katin - CHITRÉ (CABECERA)Kathia Steffanie Villarreal SolisNessuna valutazione finora
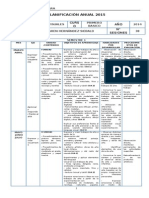
- 1° de Secundaria AP - 1° TrimestreDocumento14 pagine1° de Secundaria AP - 1° TrimestreAlem Amed Rojas UgarteNessuna valutazione finora
- Ley de Impuesto A La Distribucion de Petroleo Crudo DECRETO 38-92Documento18 pagineLey de Impuesto A La Distribucion de Petroleo Crudo DECRETO 38-92chiogt100% (2)
- Tasa de Cambio Representativa Del Mercado Definicion y Aplicacion PDFDocumento2 pagineTasa de Cambio Representativa Del Mercado Definicion y Aplicacion PDFJohanna JimenezNessuna valutazione finora
- Cómo Aplicamos La Antropología en La Experiencia de UsuarioDocumento5 pagineCómo Aplicamos La Antropología en La Experiencia de UsuarioKirvis MendezNessuna valutazione finora
- Electiva CPCDocumento2 pagineElectiva CPCLorena Moncada ColmenaresNessuna valutazione finora