Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Chapter 5 Modelling and Control PrototypingDocumento25 pagineChapter 5 Modelling and Control PrototypingedwardsilvaNessuna valutazione finora
- Airfoils, Bernoulli and NewtonDocumento4 pagineAirfoils, Bernoulli and NewtonedwardsilvaNessuna valutazione finora
- Altera DspbookDocumento8 pagineAltera DspbookGopal Balakrishnan IyerNessuna valutazione finora
- Calibration PDFDocumento112 pagineCalibration PDFasjad rajaNessuna valutazione finora
- InTech-Advanced Uav Trajectory Generation Planning and GuidanceDocumento29 pagineInTech-Advanced Uav Trajectory Generation Planning and GuidanceDaniel DupréNessuna valutazione finora
- Lecture Notes On Intermediate Fluid MechanicsDocumento298 pagineLecture Notes On Intermediate Fluid MechanicsedwardsilvaNessuna valutazione finora
- Concept of Lift and DragDocumento7 pagineConcept of Lift and DraglarasmoyoNessuna valutazione finora
- Chapter 1 Design and Development of A Fly-By-WirelessDocumento13 pagineChapter 1 Design and Development of A Fly-By-WirelessedwardsilvaNessuna valutazione finora
- Chapter 1 Design and Development of A Fly-By-WirelessDocumento13 pagineChapter 1 Design and Development of A Fly-By-WirelessedwardsilvaNessuna valutazione finora
- Chapter 8 Fly-The-Camera PerspectiveDocumento29 pagineChapter 8 Fly-The-Camera PerspectiveedwardsilvaNessuna valutazione finora
- Chapter 6 Stabilization of Scale Model Vertical Take-OffDocumento21 pagineChapter 6 Stabilization of Scale Model Vertical Take-OffedwardsilvaNessuna valutazione finora
- Take-Home Test 1 Solutions: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. MegretskiDocumento5 pagineTake-Home Test 1 Solutions: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. Megretskihulier2Nessuna valutazione finora
- Chapter 8 Fly-The-Camera PerspectiveDocumento29 pagineChapter 8 Fly-The-Camera PerspectiveedwardsilvaNessuna valutazione finora
- Aircraft Hydraulic SystemsDocumento23 pagineAircraft Hydraulic SystemsedwardsilvaNessuna valutazione finora
- Six Sigma For System Innovation Dessign 1233779239181412 3Documento39 pagineSix Sigma For System Innovation Dessign 1233779239181412 3edwardsilvaNessuna valutazione finora
- Inverse Transpose Matrix CalculatorDocumento6 pagineInverse Transpose Matrix CalculatoredwardsilvaNessuna valutazione finora
- Constraints and Connections in AbaqusDocumento28 pagineConstraints and Connections in AbaqusVenu Kishore83% (6)
- Inverse Transpose Matrix CalculatorDocumento6 pagineInverse Transpose Matrix CalculatoredwardsilvaNessuna valutazione finora
- Air Compressor DownloadableDocumento39 pagineAir Compressor DownloadableedwardsilvaNessuna valutazione finora
- Project Management TipsDocumento10 pagineProject Management Tipstrisno100% (20)
- Inverse Transpose Matrix CalculatorDocumento6 pagineInverse Transpose Matrix CalculatoredwardsilvaNessuna valutazione finora
- Constraints and Connections in AbaqusDocumento28 pagineConstraints and Connections in AbaqusVenu Kishore83% (6)
- Complete Study Guide MIT FEM Prof BatheDocumento194 pagineComplete Study Guide MIT FEM Prof BathekbdbmmNessuna valutazione finora
- MatrizDocumento1 paginaMatrizedwardsilvaNessuna valutazione finora
- Project Management TemplatesDocumento21 pagineProject Management TemplatesChandrashekar ShettyNessuna valutazione finora
- Take-Home Test 1 Solutions: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. MegretskiDocumento5 pagineTake-Home Test 1 Solutions: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. Megretskihulier2Nessuna valutazione finora
- Take-Home Test 1: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. MegretskiDocumento2 pagineTake-Home Test 1: 6.243J (Fall 2003) : Dynamics of Nonlinear Systems by A. MegretskiedwardsilvaNessuna valutazione finora
- Orange Book Management of RiskDocumento52 pagineOrange Book Management of Riskklondike2517Nessuna valutazione finora
- Aerodynamics of Cars PDFDocumento4 pagineAerodynamics of Cars PDFPrakhar AggarwalNessuna valutazione finora
- 5 Steps To Risk AssessmentDocumento8 pagine5 Steps To Risk AssessmentAnnie HawkinsNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Ascc Catalog 2014-2016Documento157 pagineAscc Catalog 2014-2016api-261615090Nessuna valutazione finora
- The Role of Youth in ForthDocumento17 pagineThe Role of Youth in ForthSamuel EmmanuelNessuna valutazione finora
- Religious Affiliation, Internalized Homophobia, and Mental Health in Lesbians, Gay Men, and BisexualsDocumento11 pagineReligious Affiliation, Internalized Homophobia, and Mental Health in Lesbians, Gay Men, and BisexualsRandy HoweNessuna valutazione finora
- The Entrepreneurial Spirit From Schumpeter To Steve Jobs - by Joseph BelbrunoDocumento6 pagineThe Entrepreneurial Spirit From Schumpeter To Steve Jobs - by Joseph Belbrunoschopniewit100% (1)
- Filed: Patrick FisherDocumento43 pagineFiled: Patrick FisherScribd Government DocsNessuna valutazione finora
- Fluid Mechanics 4Documento3 pagineFluid Mechanics 4Pugao SpikeNessuna valutazione finora
- STC 2010 CatDocumento68 pagineSTC 2010 Catjnovitski1027Nessuna valutazione finora
- 4D Asp: Wall Tiling 4D - PG 1Documento3 pagine4D Asp: Wall Tiling 4D - PG 1Vlaho AlamatNessuna valutazione finora
- Graph Theory (B)Documento2 pagineGraph Theory (B)Waqar RoyNessuna valutazione finora
- Nikolaenko Et Al 86287Documento7 pagineNikolaenko Et Al 86287maytee19Nessuna valutazione finora
- Role of ICT & Challenges in Disaster ManagementDocumento13 pagineRole of ICT & Challenges in Disaster ManagementMohammad Ali100% (3)
- Activity Based Costing No.1Documento3 pagineActivity Based Costing No.1joint accountNessuna valutazione finora
- Theories and Paradigms in SociologyDocumento10 pagineTheories and Paradigms in SociologyAngel KimNessuna valutazione finora
- Dos and DontsDocumento1 paginaDos and DontsLeah GlickNessuna valutazione finora
- Building and Environment: Edward NGDocumento11 pagineBuilding and Environment: Edward NGauliaNessuna valutazione finora
- SyllogismDocumento6 pagineSyllogismjj3problembearNessuna valutazione finora
- 240-2 - Review Test 2 - 2Documento4 pagine240-2 - Review Test 2 - 2Nathaniel McleodNessuna valutazione finora
- Discovery Issues Resolution Naga NotesDocumento7 pagineDiscovery Issues Resolution Naga NotesNagaPrasannaKumarKakarlamudi100% (1)
- Color OverlaysDocumento2 pagineColor Overlaysapi-366876366Nessuna valutazione finora
- Professional Scrum Master I Simulator Test 1 PDFDocumento8 pagineProfessional Scrum Master I Simulator Test 1 PDFRahul GandhiNessuna valutazione finora
- Kindergarten DLL MELC Q2 Week 5 AsfDocumento8 pagineKindergarten DLL MELC Q2 Week 5 AsfDiana Rose AcupeadoNessuna valutazione finora
- A Brief Tutorial On Interval Type-2 Fuzzy Sets and SystemsDocumento10 pagineA Brief Tutorial On Interval Type-2 Fuzzy Sets and SystemstarekeeeNessuna valutazione finora
- Perkembangan Kurikulum USADocumento25 paginePerkembangan Kurikulum USAFadhlah SenifotoNessuna valutazione finora
- BMath3 ProjectDocumento6 pagineBMath3 ProjectRainbow VillanuevaNessuna valutazione finora
- 12.22.08 Dr. King Quotes BookletDocumento16 pagine12.22.08 Dr. King Quotes BookletlamchunyienNessuna valutazione finora
- EnMS. MayDocumento7 pagineEnMS. MayRicky NoblezaNessuna valutazione finora
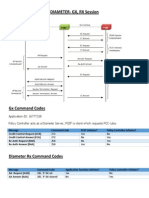
- S6a S13 GX RX InterfacesDocumento4 pagineS6a S13 GX RX Interfacessyedsajjad68Nessuna valutazione finora
- CalibrationDocumento9 pagineCalibrationLuis Gonzalez100% (1)
- Solution of Linear Systems of Equations in Matlab, Freemat, Octave and Scilab by WWW - Freemat.infoDocumento4 pagineSolution of Linear Systems of Equations in Matlab, Freemat, Octave and Scilab by WWW - Freemat.inforodwellheadNessuna valutazione finora
- Calibration Procedure FOR Surface Plates Planekator Method: Technical ManualDocumento11 pagineCalibration Procedure FOR Surface Plates Planekator Method: Technical Manualentico100% (1)