Potrebbero piacerti anche
- Clase PR Ctica 15 Mar Programaci N de ComputadoresDocumento13 pagineClase PR Ctica 15 Mar Programaci N de ComputadoresGe CamargoNessuna valutazione finora
- Notas de InvestigaciónDocumento2 pagineNotas de InvestigaciónGe CamargoNessuna valutazione finora
- NOTASDocumento1 paginaNOTASGe CamargoNessuna valutazione finora
- Scada-Lab-1 Aldo Perdomo Omar CamargoDocumento5 pagineScada-Lab-1 Aldo Perdomo Omar CamargoGe CamargoNessuna valutazione finora
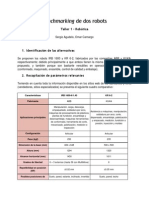
- Taller 1 RobóticaDocumento6 pagineTaller 1 RobóticaGe CamargoNessuna valutazione finora
- API Tarea3 PPLDocumento1 paginaAPI Tarea3 PPLGe CamargoNessuna valutazione finora
- API Tarea3 Api2Documento1 paginaAPI Tarea3 Api2Ge CamargoNessuna valutazione finora
- NotasDocumento1 paginaNotasGe CamargoNessuna valutazione finora
- API Tarea3Documento1 paginaAPI Tarea3Ge CamargoNessuna valutazione finora
- Actividade - Propuesta de TesisDocumento2 pagineActividade - Propuesta de TesisGe CamargoNessuna valutazione finora
- Preguntas para Enamorarse en La Primera CitaDocumento2 paginePreguntas para Enamorarse en La Primera CitaDavidNikoTesNessuna valutazione finora
- EscritoDocumento1 paginaEscritoGe CamargoNessuna valutazione finora
- Descripción Del Montaje MecánicoDocumento1 paginaDescripción Del Montaje MecánicoGe CamargoNessuna valutazione finora
- Propuesta Proyecto FinalDocumento3 paginePropuesta Proyecto FinalGe CamargoNessuna valutazione finora
- Avance Lab 1Documento1 paginaAvance Lab 1Ge CamargoNessuna valutazione finora
- Descripcion Del ProyectoDocumento2 pagineDescripcion Del ProyectoGe CamargoNessuna valutazione finora
- InformeDocumento4 pagineInformeGe CamargoNessuna valutazione finora
- Motor DCDocumento4 pagineMotor DCJeison OrobioNessuna valutazione finora
- Lacan y El DESEODocumento2 pagineLacan y El DESEOGe CamargoNessuna valutazione finora
- Funciones 11 SegmentosDocumento2 pagineFunciones 11 SegmentosGe CamargoNessuna valutazione finora
- Informe 1Documento5 pagineInforme 1Ge CamargoNessuna valutazione finora
- Motor DCDocumento4 pagineMotor DCJeison OrobioNessuna valutazione finora
- Informe Lab 3 ControlDocumento7 pagineInforme Lab 3 ControlGe CamargoNessuna valutazione finora
- Medidas Por DeflexionDocumento4 pagineMedidas Por DeflexionGe CamargoNessuna valutazione finora
- Lab 2 Omar JorgefinalDocumento5 pagineLab 2 Omar JorgefinalGe CamargoNessuna valutazione finora
- Formato de Trama, Envio Secuancial de Informacion en Una Red Con Topologia Token BusDocumento4 pagineFormato de Trama, Envio Secuancial de Informacion en Una Red Con Topologia Token BusGe CamargoNessuna valutazione finora
- Avance Lab 1Documento1 paginaAvance Lab 1Ge CamargoNessuna valutazione finora
- Tabla de Direccionamiento Ip Proyecto Final Redes ComputacionalesDocumento1 paginaTabla de Direccionamiento Ip Proyecto Final Redes ComputacionalesGe CamargoNessuna valutazione finora
- Propuesta ProyectoDocumento3 paginePropuesta ProyectoGe CamargoNessuna valutazione finora
- Excel Avanzado Propuesta 1Documento2 pagineExcel Avanzado Propuesta 1HectorNessuna valutazione finora
- Tutorial Como Cambiar El Tema Del TraktorDocumento7 pagineTutorial Como Cambiar El Tema Del TraktorChristoper OlsonNessuna valutazione finora
- Fases e Informe AuditoriaDocumento6 pagineFases e Informe Auditoriadarkness5125100% (6)
- Por Qué Medir y para QuéDocumento3 paginePor Qué Medir y para QuéangieNessuna valutazione finora
- TRABAJO PRACTICO (Funcion Cuadratica)Documento3 pagineTRABAJO PRACTICO (Funcion Cuadratica)PatriciaGianuzziNessuna valutazione finora
- Distribucion Teclado Español QwertyDocumento21 pagineDistribucion Teclado Español Qwertykzoax77Nessuna valutazione finora
- Listas Lenguaje CDocumento49 pagineListas Lenguaje CAimee ZuñigaNessuna valutazione finora
- PD1 VelardeDocumento7 paginePD1 VelardeSebastiam VelardeNessuna valutazione finora
- Temario ISIC-2010-224 Topicos Avanzados de ProgramacionDocumento11 pagineTemario ISIC-2010-224 Topicos Avanzados de ProgramacionAidee FierroNessuna valutazione finora
- HydrovlabDocumento37 pagineHydrovlabJhoselineAlejandraMartinezGarciaNessuna valutazione finora
- Mapa Conceptual Proceso de Control Interno y Sus ComponentesDocumento1 paginaMapa Conceptual Proceso de Control Interno y Sus Componentesfabiola burgos50% (2)
- ConexionismoDocumento10 pagineConexionismoEnteringAbbysNessuna valutazione finora
- Ejercicio garantía extendidaDocumento20 pagineEjercicio garantía extendidaChristine Berbesi ParraNessuna valutazione finora
- Proceso de VentasDocumento5 pagineProceso de VentasKev StanlysNessuna valutazione finora
- Reliability Centered Maintenance (RCM)Documento25 pagineReliability Centered Maintenance (RCM)Erick Manosalvas100% (1)
- Métodos abreviados de teclado de Word para WindowsDocumento3 pagineMétodos abreviados de teclado de Word para WindowsExtrovertido Sin LimitesNessuna valutazione finora
- Arboles Tropicales Comunes Del Área MayaDocumento17 pagineArboles Tropicales Comunes Del Área MayacoleonyxNessuna valutazione finora
- Aplicaciones de Un TransformadorDocumento2 pagineAplicaciones de Un TransformadorZulemiithaw CortezNessuna valutazione finora
- Gradiente y derivada direccionalDocumento14 pagineGradiente y derivada direccionalAmado Antonio Alemán GonzálezNessuna valutazione finora
- Simulador EnsamblajeDocumento10 pagineSimulador EnsamblajeDiane Navarrete BalbuenaNessuna valutazione finora
- 260101054Documento2 pagine260101054MariaZerdasNessuna valutazione finora
- Teoría de La Conducta de La AdministraciónDocumento13 pagineTeoría de La Conducta de La AdministraciónOscar Jair Portilla GomezNessuna valutazione finora
- Mehu 515 7461 Mehu M 20160811090814Documento9 pagineMehu 515 7461 Mehu M 20160811090814celecoxib200Nessuna valutazione finora
- Deber 5 Diagnostico SituacionalDocumento2 pagineDeber 5 Diagnostico SituacionalAlan Jordan QuirozNessuna valutazione finora
- Admin A Van Zada LinuxDocumento18 pagineAdmin A Van Zada Linuxandrea0% (1)
- Caso ToyotaDocumento37 pagineCaso ToyotaHernandez BelenNessuna valutazione finora
- Programa Investigación Geográfica IDocumento4 paginePrograma Investigación Geográfica IDiana Durán100% (1)
- Herramientas de pruebas de rendimiento: Jmeter, LoadNinja, WebLoad y másDocumento4 pagineHerramientas de pruebas de rendimiento: Jmeter, LoadNinja, WebLoad y másMaria Paula Franco GuzmanNessuna valutazione finora
- Historia Del Kilogramo PDFDocumento4 pagineHistoria Del Kilogramo PDFAndrés Luis Dulcich0% (1)
- Evaluacion Formativa, Sem 1Documento7 pagineEvaluacion Formativa, Sem 1Edinson Alexi Crisosto100% (1)