Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- BMO ProblemsDocumento34 pagineBMO Problemsnguyentangvu0% (1)
- Lesson Plan - Organization and ManagementDocumento5 pagineLesson Plan - Organization and ManagementBilly Joe80% (15)
- Archaeology - October 2016 PDFDocumento72 pagineArchaeology - October 2016 PDFOmer CetinkayaNessuna valutazione finora
- 4 Qi Imbalances and 5 Elements: A New System For Diagnosis and TreatmentDocumento5 pagine4 Qi Imbalances and 5 Elements: A New System For Diagnosis and Treatmentpixey55100% (1)
- Project Report - Performance Anaylysis of Mutual Funds in IndiaDocumento52 pagineProject Report - Performance Anaylysis of Mutual Funds in Indiapankaj100% (1)
- Olympiad Training Materials - Arithmetic in Quadratic Fields PDFDocumento7 pagineOlympiad Training Materials - Arithmetic in Quadratic Fields PDFAch JohnNessuna valutazione finora
- Argumentative EssayDocumento7 pagineArgumentative EssayHoang Thi Huyen DieuNessuna valutazione finora
- So Do PU HoaHuuCo LeNgocTuDocumento2 pagineSo Do PU HoaHuuCo LeNgocTuNguyen Ha Duc ThinhNessuna valutazione finora
- Giao Trinh Toan Dai Hoc Su Pham TP - HCMDocumento163 pagineGiao Trinh Toan Dai Hoc Su Pham TP - HCMPham Huu DanhNessuna valutazione finora
- Co Co: U-Trac U-TracDocumento56 pagineCo Co: U-Trac U-TracNguyen Ha Duc ThinhNessuna valutazione finora
- TailieubdtDocumento31 pagineTailieubdtNguyen Ha Duc ThinhNessuna valutazione finora
- 100 Inequality ProblemsDocumento45 pagine100 Inequality ProblemsNguyen Ha Duc ThinhNessuna valutazione finora
- Phuong Trinh Luong Giac Co BanDocumento16 paginePhuong Trinh Luong Giac Co Bananhduong_dhts20052254Nessuna valutazione finora
- Functional Equations: Olympiad CornerDocumento4 pagineFunctional Equations: Olympiad CornerNguyen Ha Duc Thinh100% (2)
- Holder Va MinkowskiDocumento3 pagineHolder Va MinkowskiNguyen Ha Duc ThinhNessuna valutazione finora
- Pi Irrational EnglishDocumento2 paginePi Irrational EnglishNguyen Ha Duc ThinhNessuna valutazione finora
- IP Solutions NewDocumento46 pagineIP Solutions NewKousik SettNessuna valutazione finora
- On The Global Controlable For Set Differential EquationsDocumento13 pagineOn The Global Controlable For Set Differential EquationsNguyen Ha Duc ThinhNessuna valutazione finora
- IP Solutions NewDocumento46 pagineIP Solutions NewKousik SettNessuna valutazione finora
- Sach Ve Al Fe Cu CRDocumento68 pagineSach Ve Al Fe Cu CRtapdoanplNessuna valutazione finora
- IP Solutions NewDocumento46 pagineIP Solutions NewKousik SettNessuna valutazione finora
- Lecture 7Documento68 pagineLecture 7Gay TonyNessuna valutazione finora
- VisualizationDocumento2 pagineVisualizationKIRAN H SNessuna valutazione finora
- "Design, Modeling and Analysis of Steam Turbine Blade": Dayananda Sagar College of EngineeringDocumento66 pagine"Design, Modeling and Analysis of Steam Turbine Blade": Dayananda Sagar College of EngineeringSHREENIVAS MNessuna valutazione finora
- GutsDocumento552 pagineGutsroparts cluj100% (1)
- Cottrell Park Golf Club 710Documento11 pagineCottrell Park Golf Club 710Mulligan PlusNessuna valutazione finora
- The Role of Leadership On Employee Performance in Singapore AirlinesDocumento42 pagineThe Role of Leadership On Employee Performance in Singapore Airlineskeshav sabooNessuna valutazione finora
- PGT Computer Science Kendriya Vidyalaya Entrance Exam Question PapersDocumento117 paginePGT Computer Science Kendriya Vidyalaya Entrance Exam Question PapersimshwezNessuna valutazione finora
- North-South Railway Project - South LineDocumento49 pagineNorth-South Railway Project - South LinesuperNessuna valutazione finora
- A Person On A Position of Air Traffic ControllerDocumento7 pagineA Person On A Position of Air Traffic ControllerMUHAMMAD RAMZANNessuna valutazione finora
- Ifrs 15Documento24 pagineIfrs 15Madhu Sudan DarjeeNessuna valutazione finora
- LoperAmid 1Documento5 pagineLoperAmid 1Hemma KusumaningrumNessuna valutazione finora
- List of ErpDocumento2 pagineList of Erpnavyug vidyapeeth trust mahadNessuna valutazione finora
- Graphs in ChemDocumento10 pagineGraphs in Chemzhaney0625Nessuna valutazione finora
- Application List: Required Items: A: Cpu-95 Ignition ModuleDocumento12 pagineApplication List: Required Items: A: Cpu-95 Ignition ModuleShubra DebNessuna valutazione finora
- UW Mathematics Professor Evaluations For Fall 2011Documento241 pagineUW Mathematics Professor Evaluations For Fall 2011DPNessuna valutazione finora
- Net June 2013Documento22 pagineNet June 2013Sunil PandeyNessuna valutazione finora
- Gynaecology Thesis TopicsDocumento7 pagineGynaecology Thesis TopicsDawn Cook100% (2)
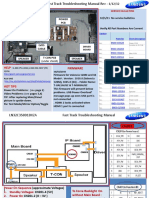
- Samsung LN55C610N1FXZA Fast Track Guide (SM)Documento4 pagineSamsung LN55C610N1FXZA Fast Track Guide (SM)Carlos OdilonNessuna valutazione finora
- Sa Inc HCP English d10840Documento64 pagineSa Inc HCP English d10840Ayu AfiantyNessuna valutazione finora
- Danielson Observation FormDocumento5 pagineDanielson Observation Formapi-242909722Nessuna valutazione finora
- Can J Chem Eng - 2022 - Mocellin - Experimental Methods in Chemical Engineering Hazard and Operability Analysis HAZOPDocumento20 pagineCan J Chem Eng - 2022 - Mocellin - Experimental Methods in Chemical Engineering Hazard and Operability Analysis HAZOPbademmaliNessuna valutazione finora
- Curriculum Vitae ofDocumento4 pagineCurriculum Vitae ofAndrew OlsonNessuna valutazione finora
- Selling AIESEC To Your TargetsDocumento7 pagineSelling AIESEC To Your TargetspijoowiseNessuna valutazione finora
- Irjet V3i7146 PDFDocumento6 pagineIrjet V3i7146 PDFatulnarkhede2002Nessuna valutazione finora
- Sculpture and ArchitectureDocumento9 pagineSculpture and ArchitectureIngrid Dianne Luga BernilNessuna valutazione finora