Potrebbero piacerti anche
- La Educación AmbientalDocumento4 pagineLa Educación AmbientalAleiro Enrique SotoNessuna valutazione finora
- Diapositivas MagnetismoDocumento10 pagineDiapositivas MagnetismojoelblancourbinaNessuna valutazione finora
- Instalaciones ElectricasDocumento4 pagineInstalaciones ElectricasJosé OlivarNessuna valutazione finora
- Fluidos MagnetorreologicosDocumento12 pagineFluidos MagnetorreologicosCinthia M. ViillafaniNessuna valutazione finora
- ElectrodinámicaDocumento15 pagineElectrodinámicaAsmid Yambay100% (1)
- IntroducciónDocumento2 pagineIntroducciónmartinNessuna valutazione finora
- Monografia Charcani VDocumento8 pagineMonografia Charcani VBrunoBallonBenaventeNessuna valutazione finora
- Estequiometria INFORME7Documento23 pagineEstequiometria INFORME7Miguel Angel Pillaca GarciaNessuna valutazione finora
- Acelerador de Partículas PDFDocumento3 pagineAcelerador de Partículas PDFPato Guaraca100% (3)
- Fundamentación TeóricaDocumento5 pagineFundamentación TeóricaEdwin GuzmánNessuna valutazione finora
- Principio de Resonancia Magnética NuclearDocumento3 paginePrincipio de Resonancia Magnética NuclearChemaa Pineda AlvarezNessuna valutazione finora
- Agricultura Sostenible y Seguridad Alimentaria PIDAASADocumento7 pagineAgricultura Sostenible y Seguridad Alimentaria PIDAASAJuanjo SánchezNessuna valutazione finora
- ANALISIS INSTRUMENTAL. Unidad 1 y 2. Introd - Metodos Electroan. Potenciociometria Definitivo.Documento22 pagineANALISIS INSTRUMENTAL. Unidad 1 y 2. Introd - Metodos Electroan. Potenciociometria Definitivo.Denisse Durán Meza100% (1)
- Energía Potencial Eléctrica y Potencial ElectricoDocumento7 pagineEnergía Potencial Eléctrica y Potencial ElectricoJunior PinedaNessuna valutazione finora
- Monografía Sobre Tratamiento de Aguas ResidualesDocumento10 pagineMonografía Sobre Tratamiento de Aguas ResidualesAlejandro Aldana MendoNessuna valutazione finora
- Estructura de Un Sistema de PotenciaDocumento5 pagineEstructura de Un Sistema de PotenciaEdwing Daniel Arias Perez100% (1)
- Capítulo 16-Equilibrio Acido-BaseDocumento75 pagineCapítulo 16-Equilibrio Acido-BaseMariela VargasNessuna valutazione finora
- Modelos de Enlace Por SatéliteDocumento9 pagineModelos de Enlace Por SatéliteAnnelis CardenasNessuna valutazione finora
- Primeras Estructuras de Una PTAPDocumento33 paginePrimeras Estructuras de Una PTAPGonzalo GalezoNessuna valutazione finora
- Práctica#2: El EspectroscopioDocumento4 paginePráctica#2: El Espectroscopiodricardocan0% (1)
- Principales Características de La Corriente Alterna y ContinuaDocumento10 paginePrincipales Características de La Corriente Alterna y ContinuaAndry BámacaNessuna valutazione finora
- Proyecto Motor de Jaula de ArdillaDocumento3 pagineProyecto Motor de Jaula de ArdillaAna R. Gatjens CNessuna valutazione finora
- Historia de La ElectricidadDocumento4 pagineHistoria de La ElectricidadAlba Chacon ChavezNessuna valutazione finora
- Ensayo de CentralesDocumento20 pagineEnsayo de CentralesPool MedinaNessuna valutazione finora
- Barreras de PotencialDocumento11 pagineBarreras de Potencialyeimmy170% (1)
- Trabajo Realizado Por Una Fuerza ConstanteDocumento12 pagineTrabajo Realizado Por Una Fuerza ConstanteFrancis Angiemar Guarino PerezNessuna valutazione finora
- Método de Punto Por Punto para Alumbrado de ExterioresDocumento8 pagineMétodo de Punto Por Punto para Alumbrado de ExterioresMax Christopher Murcio JuárezNessuna valutazione finora
- Marco Teórico de Celdas de Combustible MicrobianaDocumento20 pagineMarco Teórico de Celdas de Combustible MicrobianaKaterineLopezCcenteNessuna valutazione finora
- Teorema de Conservacion de Cantidad de MovimientoDocumento7 pagineTeorema de Conservacion de Cantidad de MovimientoLuis HernandezNessuna valutazione finora
- Superficies EquipotencialesDocumento3 pagineSuperficies EquipotencialesLeoNessuna valutazione finora
- Conclusion de Sistema de Tuberías de Flujo ComprensibleDocumento1 paginaConclusion de Sistema de Tuberías de Flujo ComprensibleSindy AguirreNessuna valutazione finora
- Sensores Mecanicos y ElectricosDocumento12 pagineSensores Mecanicos y ElectricosRosmaryCafaro100% (1)
- Informe 2Documento8 pagineInforme 2meryNessuna valutazione finora
- Variables Aleatorias y BidimensionalesDocumento58 pagineVariables Aleatorias y Bidimensionalesfabiola fontalbaNessuna valutazione finora
- Planeacion Subestaciones ElectricasDocumento5 paginePlaneacion Subestaciones ElectricasLuis Sabino Segura SilvaNessuna valutazione finora
- Eqan U2 Atr JucaDocumento2 pagineEqan U2 Atr JucaJulio C. Chan AngelesNessuna valutazione finora
- Software para Quimica ComputacionalDocumento6 pagineSoftware para Quimica ComputacionalaalvaNessuna valutazione finora
- Maquinaria Pesada y Movimiento de Tierra F PDFDocumento8 pagineMaquinaria Pesada y Movimiento de Tierra F PDFpabloloayzaNessuna valutazione finora
- Laboratoio 1 Generador de Van de Graff.Documento13 pagineLaboratoio 1 Generador de Van de Graff.ivanNessuna valutazione finora
- Maquina SincronaDocumento44 pagineMaquina SincronaJulio Fabricio Pino BustamanteNessuna valutazione finora
- Voltaje ExposicionDocumento2 pagineVoltaje Exposicionvictor chiquito kingsNessuna valutazione finora
- Practica 5 Conver 2Documento12 paginePractica 5 Conver 2Van Persi Jair Adolfo100% (1)
- Practica #7 Propiedades Electricas de Los ConductoresDocumento6 paginePractica #7 Propiedades Electricas de Los ConductoresJorge VasquezNessuna valutazione finora
- Aplicaciones Del Campo y Carga Eléctrica en La Vida DiariaDocumento16 pagineAplicaciones Del Campo y Carga Eléctrica en La Vida DiariaDarlin EspinosaNessuna valutazione finora
- Introduccion Al Laboratorio de Circuitos ElectricosDocumento3 pagineIntroduccion Al Laboratorio de Circuitos ElectricosVanessa BautistaNessuna valutazione finora
- Demostracion de La 1era Ley de KirchoffDocumento2 pagineDemostracion de La 1era Ley de KirchoffArmando Nilton Santibañez BenavidesNessuna valutazione finora
- Electricidad DinámicaDocumento3 pagineElectricidad DinámicaCésar Fidel CruzNessuna valutazione finora
- Ensayo De: Electricidad Inalámbrica.Documento8 pagineEnsayo De: Electricidad Inalámbrica.Nairobi Gonzalez de JesusNessuna valutazione finora
- PRÁCTICA 4 Campo Eléctrico y Superficies Equipotenciales - TeoríaDocumento2 paginePRÁCTICA 4 Campo Eléctrico y Superficies Equipotenciales - TeoríaFernanda DelgadoNessuna valutazione finora
- Electroquimica en Los Seres VivosDocumento13 pagineElectroquimica en Los Seres VivosCristian Lugo SalyrosasNessuna valutazione finora
- Normalizacion de La Bahia I y II Se Independencia PDFDocumento292 pagineNormalizacion de La Bahia I y II Se Independencia PDFThony LópezNessuna valutazione finora
- Electricidad y Magnetismo ApuntesDocumento291 pagineElectricidad y Magnetismo ApuntesportosinNessuna valutazione finora
- Aplicación de Ecuaciones Diferenciales de Primer OrdenDocumento8 pagineAplicación de Ecuaciones Diferenciales de Primer OrdenJerry BrowningNessuna valutazione finora
- Mendoza M. Ecuaciones Basicas de Mecanica de FluidosDocumento9 pagineMendoza M. Ecuaciones Basicas de Mecanica de FluidospalmafernandezNessuna valutazione finora
- SolarímetroDocumento3 pagineSolarímetroJean Gutierrez100% (1)
- Ley de Inducción de Faraday, S1Documento17 pagineLey de Inducción de Faraday, S1CORA OLIVETH JARQUIN BERMUDEZNessuna valutazione finora
- FERRORESONANCIADocumento10 pagineFERRORESONANCIAAlex Freire100% (1)
- Informe de Laboratorio 1 (Circuitos Logicos) - IEEE 1Documento3 pagineInforme de Laboratorio 1 (Circuitos Logicos) - IEEE 1Andrés Felipe EscobarNessuna valutazione finora
- FotocatalisisDocumento3 pagineFotocatalisisMarielaReyesNessuna valutazione finora
- Trabajo Fisica.. Fraan y CotyDocumento20 pagineTrabajo Fisica.. Fraan y Cotycoty009Nessuna valutazione finora
- Informe Bioquimica 7Documento6 pagineInforme Bioquimica 7Roseline Galiano100% (3)
- Energia Solar Semana 3Documento16 pagineEnergia Solar Semana 3Luis PatiñoNessuna valutazione finora
- Principio de BernoulliDocumento1 paginaPrincipio de BernoulliGera FJNessuna valutazione finora
- Manual de Instalaciones ElectDocumento73 pagineManual de Instalaciones ElectLuis Cesar VaPiNessuna valutazione finora
- Ejerc-Cinematica 02Documento1 paginaEjerc-Cinematica 02YeanStradaNessuna valutazione finora
- Lab01 - Rectificadores Monofasicos Con Filtro - ADocumento10 pagineLab01 - Rectificadores Monofasicos Con Filtro - ALuisW.NoriegaNessuna valutazione finora
- Lab1 FisicoquimicaDocumento5 pagineLab1 FisicoquimicaDiego ValenciaNessuna valutazione finora
- Tarea 2 Bioenergetica 1Documento4 pagineTarea 2 Bioenergetica 1Brandon CaballeroNessuna valutazione finora
- Hoja de Presentacion Instituto Tecnologico Del Istmo - Ingenieria IndustrialDocumento22 pagineHoja de Presentacion Instituto Tecnologico Del Istmo - Ingenieria IndustriallUiSflOrSNessuna valutazione finora
- Teoria Del ColorDocumento2 pagineTeoria Del ColorAnDrea AnDreaNessuna valutazione finora
- Primer Control de Lectura - Geotecnia Vial - Grupal 2020 2Documento4 paginePrimer Control de Lectura - Geotecnia Vial - Grupal 2020 2JHON MARCO REYNOSO HILARIONessuna valutazione finora
- Interstellar ResumenDocumento2 pagineInterstellar ResumenJimmy Ordoñez100% (1)
- 2008 Electroterapia. ElectroestimulaciónDocumento20 pagine2008 Electroterapia. ElectroestimulaciónFabián Esteban MercadoNessuna valutazione finora
- Caída Libre y Tiro VerticalDocumento17 pagineCaída Libre y Tiro VerticalJakelin Fernandez S.Nessuna valutazione finora
- Deber 10Documento15 pagineDeber 10Fernando GarcíaNessuna valutazione finora
- Informe 5 FisicoqumicaDocumento3 pagineInforme 5 FisicoqumicaJhoana TamiNessuna valutazione finora
- Practica 5Documento6 paginePractica 5Armando TiconaNessuna valutazione finora
- P1-Dios No Existe y La Cuestión de Dios.Documento3 pagineP1-Dios No Existe y La Cuestión de Dios.Perfumería BonanzaNessuna valutazione finora
- Potencial ElectricoDocumento13 paginePotencial ElectricoJonathan Sanchez DepazNessuna valutazione finora
- Trabajo de Tecnologia e InformaticaDocumento11 pagineTrabajo de Tecnologia e Informaticamarian pulgarinNessuna valutazione finora
- Primer Examen Parcial - ICFyQDocumento3 paginePrimer Examen Parcial - ICFyQGeraldine OstoichNessuna valutazione finora
- Taller de Equilibrio y TorquesDocumento9 pagineTaller de Equilibrio y TorquesCamilo Moreno ContrerasNessuna valutazione finora
- SCRRRR4Documento2 pagineSCRRRR4Jesús Guevara PerezNessuna valutazione finora
- Peso Masa y GavedadDocumento2 paginePeso Masa y GavedadIván ReyesNessuna valutazione finora
- Balance de Energia - Procesos Industriales - Ejercicios PDFDocumento11 pagineBalance de Energia - Procesos Industriales - Ejercicios PDFGabriel E. Garcia Mendoza100% (2)
- Mruv - Mru - Academia Ricardo PalmaDocumento2 pagineMruv - Mru - Academia Ricardo PalmaNoe Pilco IsuizaNessuna valutazione finora
- Cap III MR 2012 I Modelos NumericosDocumento27 pagineCap III MR 2012 I Modelos NumericosRudy quispe vargasNessuna valutazione finora
- RESUMEN Propiedades EléctricasDocumento2 pagineRESUMEN Propiedades EléctricasEnrique RiveraNessuna valutazione finora
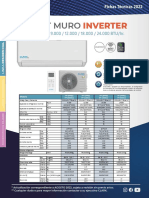
- Clark Inverter WifiDocumento1 paginaClark Inverter WifiSkadi ClimatizaciónNessuna valutazione finora