Potrebbero piacerti anche
- Amorphous Semiconductors: Structural, Optical, and Electronic PropertiesDa EverandAmorphous Semiconductors: Structural, Optical, and Electronic PropertiesNessuna valutazione finora
- Howwell The Poffenberger Swart Formula Apply To OHLDocumento10 pagineHowwell The Poffenberger Swart Formula Apply To OHLtanto_deep_15Nessuna valutazione finora
- An Introduction to the Physics and Electrochemistry of Semiconductors: Fundamentals and ApplicationsDa EverandAn Introduction to the Physics and Electrochemistry of Semiconductors: Fundamentals and ApplicationsNessuna valutazione finora
- Design of Single Plate Shear ConnectionsDocumento12 pagineDesign of Single Plate Shear Connectionssecanet10Nessuna valutazione finora
- Vacuum Nanoelectronic Devices: Novel Electron Sources and ApplicationsDa EverandVacuum Nanoelectronic Devices: Novel Electron Sources and ApplicationsNessuna valutazione finora
- A New Method To Design End Plate Moment ConnectionsDocumento31 pagineA New Method To Design End Plate Moment Connectionsjihu1170Nessuna valutazione finora
- Lui 1988Documento21 pagineLui 1988fahmi aballiNessuna valutazione finora
- Practical Formula Cable TensionDocumento6 paginePractical Formula Cable TensionAlma M. LaraNessuna valutazione finora
- Analysis of Truss-Cable StructuresDocumento9 pagineAnalysis of Truss-Cable StructuresKtk ZadNessuna valutazione finora
- The Influence of Broken Cables On The Structural Behavior of Long-Span Cable-Stayed BridgesDocumento10 pagineThe Influence of Broken Cables On The Structural Behavior of Long-Span Cable-Stayed BridgesMashudi AliNessuna valutazione finora
- Ultimate Load Capacity of Cable-Stayed Bridges by Ying Xii and J. S. Kuang, Z Member, ASCEDocumento9 pagineUltimate Load Capacity of Cable-Stayed Bridges by Ying Xii and J. S. Kuang, Z Member, ASCEFrancisco FaggioniNessuna valutazione finora
- Non-Linear Analysis of Structural Steel FramesDocumento22 pagineNon-Linear Analysis of Structural Steel FramesalfonsoNessuna valutazione finora
- Effect of Cable Degradation On Dynamic Behavior of Cable Stayed BridgesDocumento11 pagineEffect of Cable Degradation On Dynamic Behavior of Cable Stayed BridgesSyarif AlNessuna valutazione finora
- Transactions On Biomedical Engineering - 1996 - Geometric Approach For Coil Coupling EnhancementDocumento7 pagineTransactions On Biomedical Engineering - 1996 - Geometric Approach For Coil Coupling EnhancementGeorgHuberIIINessuna valutazione finora
- Ijaret 09 02 008Documento10 pagineIjaret 09 02 008Rajesh Kumar PaulNessuna valutazione finora
- Id 009Documento8 pagineId 009nenad lazicNessuna valutazione finora
- An118-Strain Gage SCMsDocumento10 pagineAn118-Strain Gage SCMsmsdn12000Nessuna valutazione finora
- Static Web Moment ConnectionsDocumento43 pagineStatic Web Moment ConnectionsAlejandro SantiagoNessuna valutazione finora
- Static Resistance Bolted Circular Flange JointsDocumento9 pagineStatic Resistance Bolted Circular Flange JointsBálint Vaszilievits-SömjénNessuna valutazione finora
- Analysis With Finite Element Method of Wire Rope: TM TMDocumento4 pagineAnalysis With Finite Element Method of Wire Rope: TM TMRajeuv GovindanNessuna valutazione finora
- Pipeline Buckling Caused by Axial LoadsDocumento9 paginePipeline Buckling Caused by Axial LoadsAdebanjo TomisinNessuna valutazione finora
- Fatigue Crack Paths in A Welded Structure: J. MartinssonDocumento8 pagineFatigue Crack Paths in A Welded Structure: J. MartinssonDetroja PunitNessuna valutazione finora
- Analysis, Design, and Optimization of Spiral Inductors and Transformers For Si RF IC'sDocumento12 pagineAnalysis, Design, and Optimization of Spiral Inductors and Transformers For Si RF IC'sRF_RAJANessuna valutazione finora
- Krijn BSND Structure and Eff Masses III IVDocumento6 pagineKrijn BSND Structure and Eff Masses III IVСоловьев ГригорийNessuna valutazione finora
- JCSR 2364 - Lateral-Torsional Buckling of Coped Beams PDFDocumento17 pagineJCSR 2364 - Lateral-Torsional Buckling of Coped Beams PDFShamaNessuna valutazione finora
- A MATLAB Program For Interaction Curves of Prestressed Concrete Columns With High Tensile Steel BarsDocumento5 pagineA MATLAB Program For Interaction Curves of Prestressed Concrete Columns With High Tensile Steel BarsMichel NicolásNessuna valutazione finora
- Shapes of A Suspended Curly Hair: Week Ending 14 FEBRUARY 2014Documento5 pagineShapes of A Suspended Curly Hair: Week Ending 14 FEBRUARY 2014MaingotNessuna valutazione finora
- Elastic Buckling of Single-Stepped Columns With End and Intermediate Axial LoadsDocumento13 pagineElastic Buckling of Single-Stepped Columns With End and Intermediate Axial Loadsmaximo.adhavNessuna valutazione finora
- Eqs 097 MDocumento19 pagineEqs 097 MPrincess ConstanciaNessuna valutazione finora
- Impedance Subsea CableDocumento6 pagineImpedance Subsea Cableebene2Nessuna valutazione finora
- Project111 smcc144Documento10 pagineProject111 smcc144burvanovNessuna valutazione finora
- Performance of Steel Shear Connections Under Combined Moment, Shear, and TensionDocumento12 paginePerformance of Steel Shear Connections Under Combined Moment, Shear, and TensionYousef AlostazNessuna valutazione finora
- A New Method For Determining The Connection ResistDocumento19 pagineA New Method For Determining The Connection ResistЖандос ТлешовNessuna valutazione finora
- Sehagic Medic - GNP2012Documento8 pagineSehagic Medic - GNP2012senad medicNessuna valutazione finora
- Influence of ACSR Steel Core Permeability On Entire Conductor's Load ParametersDocumento4 pagineInfluence of ACSR Steel Core Permeability On Entire Conductor's Load ParametersMustafa JobehNessuna valutazione finora
- Using Abaqus Cohesive Element To Model Peeling of An Epoxy-Donded Alumium StripDocumento20 pagineUsing Abaqus Cohesive Element To Model Peeling of An Epoxy-Donded Alumium StripRabee ShammasNessuna valutazione finora
- Cable Element Analysis TechniquesDocumento16 pagineCable Element Analysis TechniquesPankaj_Taneja_9684Nessuna valutazione finora
- Steinmetz CP Magnetic ReluctivityDocumento8 pagineSteinmetz CP Magnetic ReluctivityMathias NagyNessuna valutazione finora
- Pipeline Buckling Caused by Axial LoadsDocumento9 paginePipeline Buckling Caused by Axial LoadslsatchithananthanNessuna valutazione finora
- Manuscript Preparation Instruction For Publishing in Computer Modeling in Engineering and Science (CMES) - 2021Documento14 pagineManuscript Preparation Instruction For Publishing in Computer Modeling in Engineering and Science (CMES) - 2021JuanNessuna valutazione finora
- 1994 - SCHARDT - Generalized Beam Theory - An Adequate Method For Couple Stability ProblemsDocumento20 pagine1994 - SCHARDT - Generalized Beam Theory - An Adequate Method For Couple Stability ProblemsJanaína Souza AlvesNessuna valutazione finora
- Omae 2001/OFT-1020Documento9 pagineOmae 2001/OFT-1020FernandoMartínIranzoNessuna valutazione finora
- 1959 Galambos & Ketter - Columns Under Combined Bending and ThrustDocumento49 pagine1959 Galambos & Ketter - Columns Under Combined Bending and ThrustAKNessuna valutazione finora
- Effect of Reinforcement On The Failure Load of RC Beams: Osama Salem, Arafa El-HellotyDocumento16 pagineEffect of Reinforcement On The Failure Load of RC Beams: Osama Salem, Arafa El-HellotyHesham EdressNessuna valutazione finora
- Viscous Damper For Hanged CablesDocumento8 pagineViscous Damper For Hanged CablesAshutoshAparajNessuna valutazione finora
- Strength Analysis Modelling of FlexibleDocumento19 pagineStrength Analysis Modelling of Flexiblexinlin.cppNessuna valutazione finora
- Stress Analysis of Drillstring Threaded ConnectionDocumento30 pagineStress Analysis of Drillstring Threaded ConnectionRyan FenyvesNessuna valutazione finora
- A Fresh Look at Bolted End - Plate Behavior and DesignDocumento11 pagineA Fresh Look at Bolted End - Plate Behavior and DesignBilly BobNessuna valutazione finora
- Axial Load Frequencies BeamsDocumento33 pagineAxial Load Frequencies BeamsKhristiam AlvarezNessuna valutazione finora
- Tesla Symp06 CorumDocumento7 pagineTesla Symp06 CorumNO,NO,NO 2 status QUONessuna valutazione finora
- A Timoshenko Beam ElementDocumento13 pagineA Timoshenko Beam ElementPavan KishoreNessuna valutazione finora
- Compact or Class 1 Limits For Rectangular Hollow Sections in BendingDocumento8 pagineCompact or Class 1 Limits For Rectangular Hollow Sections in BendingKolumbán ZoltánNessuna valutazione finora
- 1 s2.0 S0143974X05000763 Main PDFDocumento22 pagine1 s2.0 S0143974X05000763 Main PDFMilmxmenNessuna valutazione finora
- Testing of A Laterally Stable Eccentrically Braced Frame For Steel Bridge PiersDocumento6 pagineTesting of A Laterally Stable Eccentrically Braced Frame For Steel Bridge PiersFlorian GranceaNessuna valutazione finora
- Critical Lateral-Torsional Buckling Moments of Steel Web-Tapered I-BeamsDocumento8 pagineCritical Lateral-Torsional Buckling Moments of Steel Web-Tapered I-BeamsCarloDoimoNessuna valutazione finora
- Characterization of Metallic-Particle Dynamics in Compressed SF - Insulated Systems Under Different Voltage StressesDocumento6 pagineCharacterization of Metallic-Particle Dynamics in Compressed SF - Insulated Systems Under Different Voltage StressesItalo ChiarellaNessuna valutazione finora
- Yang-2006-Interlayer Stress in Laminate Beam of Piezoelectric and Elastic MaterialsDocumento6 pagineYang-2006-Interlayer Stress in Laminate Beam of Piezoelectric and Elastic MaterialsAnonymous wWOWz9UnWNessuna valutazione finora
- Design Optimization and Sensitivity Analysis On Buckling Stability of Piezoelectric Truss StructuresDocumento8 pagineDesign Optimization and Sensitivity Analysis On Buckling Stability of Piezoelectric Truss StructuresJeff HNessuna valutazione finora
- Inelastic Buckling of Beams PDFDocumento18 pagineInelastic Buckling of Beams PDFlyeshiunNessuna valutazione finora
- Elmeco4 325-331Documento7 pagineElmeco4 325-331luis900000Nessuna valutazione finora
- PEC Requirements For Adequate Wiring Sigle & Multi Family DwellingDocumento20 paginePEC Requirements For Adequate Wiring Sigle & Multi Family DwellingEm PeeNessuna valutazione finora
- Brick Work: Laurie BakerDocumento22 pagineBrick Work: Laurie BakerShaiwal_2997Nessuna valutazione finora
- BME301 - Material Engineering Notes - 2023 - 24Documento15 pagineBME301 - Material Engineering Notes - 2023 - 24kec.abhishek463Nessuna valutazione finora
- Imco End MillsDocumento36 pagineImco End MillsgurdeeNessuna valutazione finora
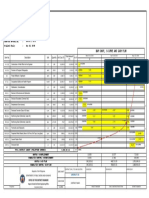
- Bar Chart and S-Curve 17rg0113 - SampleDocumento1 paginaBar Chart and S-Curve 17rg0113 - SampleRyan Macayan100% (1)
- Hvac Report 20140604Documento198 pagineHvac Report 20140604Muhammad Yusuf FirdausNessuna valutazione finora
- IS 2185-3 (1984) - Concrete Masonry Units, Part 3 - Autoclaved Cellular Aerated Concrete BlocksDocumento21 pagineIS 2185-3 (1984) - Concrete Masonry Units, Part 3 - Autoclaved Cellular Aerated Concrete Blocksmanish_shashikantNessuna valutazione finora
- Asme Sa-562-Sa-562M Specification For Pressure Vessel Plates, Carbon Steel, Manganese-Titanium Forglass or Diffused Metallic Coatings PDFDocumento4 pagineAsme Sa-562-Sa-562M Specification For Pressure Vessel Plates, Carbon Steel, Manganese-Titanium Forglass or Diffused Metallic Coatings PDFElkin Dario Aguirre MesaNessuna valutazione finora
- Electronics Quarter 1 Module 6Documento5 pagineElectronics Quarter 1 Module 6malicdemrayzanicoleNessuna valutazione finora
- Examination 4 - HydraulicsDocumento3 pagineExamination 4 - HydraulicsjefreyNessuna valutazione finora
- Buoyant Foam TutorialDocumento26 pagineBuoyant Foam TutorialWagner GaluppoNessuna valutazione finora
- ECSS E ST 32 08C Rev.1 (15october2014)Documento23 pagineECSS E ST 32 08C Rev.1 (15october2014)sundar_subash25Nessuna valutazione finora
- Lysaght Trimdek-Optima 2021Documento12 pagineLysaght Trimdek-Optima 2021Fahmi YusoffNessuna valutazione finora
- F1 Flow Measurement in Closed ConduitDocumento5 pagineF1 Flow Measurement in Closed ConduitSzeQiLungNessuna valutazione finora
- Failure of ToolDocumento8 pagineFailure of ToolPROD DOPENessuna valutazione finora
- ACI 318-08, Appendix DDocumento47 pagineACI 318-08, Appendix Dgelustan200691% (22)
- YOURHOME Materials RammedEarthDocumento5 pagineYOURHOME Materials RammedEarthShalini SivaNessuna valutazione finora
- Steel Design 7 Nov 2020Documento2 pagineSteel Design 7 Nov 2020Justine Ejay MoscosaNessuna valutazione finora
- Proplast RC50 - TDSDocumento2 pagineProplast RC50 - TDSAhmed AbuoelnagaNessuna valutazione finora
- CVC Thermoset BrochureDocumento28 pagineCVC Thermoset BrochureMattNessuna valutazione finora
- BS 5911-230-1994Documento19 pagineBS 5911-230-1994laurentiuNessuna valutazione finora
- Macmat R-Erosion Control MatDocumento4 pagineMacmat R-Erosion Control MatfelixjoseNessuna valutazione finora
- Jakarta 2Documento120 pagineJakarta 2Anang QosimNessuna valutazione finora
- Museum Architectural BriefDocumento22 pagineMuseum Architectural BriefDivya Nair50% (2)
- 03300Documento27 pagine03300uddinnadeemNessuna valutazione finora
- 03 Welding Imperfections 29-11-03Documento17 pagine03 Welding Imperfections 29-11-03bizhanjNessuna valutazione finora
- CT2 AssignmentDocumento16 pagineCT2 AssignmentCHI YAN KONGNessuna valutazione finora
- Wooden Doors CatalogueDocumento25 pagineWooden Doors CatalogueGayan IndunilNessuna valutazione finora
- Breakdown of The Schmid Law in BCC Molybdenum Related To The Effect of Shear Stress Perpendicular To The Slip Direction, V. VitekDocumento4 pagineBreakdown of The Schmid Law in BCC Molybdenum Related To The Effect of Shear Stress Perpendicular To The Slip Direction, V. VitekErsin KeserNessuna valutazione finora
- Is 1343Documento65 pagineIs 134335Nessuna valutazione finora