Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- 21 Christmas Songs and Carols For Solo GuitarDocumento26 pagine21 Christmas Songs and Carols For Solo Guitaritalo_ramirez_591% (23)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Demystifying Noise Spectre ExampleDocumento20 pagineDemystifying Noise Spectre ExampleRishiNessuna valutazione finora
- What To Bring To The RegistrationDocumento1 paginaWhat To Bring To The RegistrationRishiNessuna valutazione finora
- Random Story 2 WorksheetDocumento1 paginaRandom Story 2 WorksheetRishiNessuna valutazione finora
- Readme (Counter)Documento1 paginaReadme (Counter)dabs230Nessuna valutazione finora
- IDT Power SupplyDocumento6 pagineIDT Power SupplyRishiNessuna valutazione finora
- Hominid EvolutionDocumento2 pagineHominid EvolutionJosephine TorresNessuna valutazione finora
- 56QFN SocketDocumento2 pagine56QFN SocketRishiNessuna valutazione finora
- Bode PlotDocumento19 pagineBode Plotkoolking786Nessuna valutazione finora
- Interval-Valued and Fuzzy-Valued Random Variables: From Computing Sample Variances To Computing Sample CovariancesDocumento8 pagineInterval-Valued and Fuzzy-Valued Random Variables: From Computing Sample Variances To Computing Sample CovariancesMichael HaleNessuna valutazione finora
- Interval-Valued and Fuzzy-Valued Random Variables: From Computing Sample Variances To Computing Sample CovariancesDocumento8 pagineInterval-Valued and Fuzzy-Valued Random Variables: From Computing Sample Variances To Computing Sample CovariancesMichael HaleNessuna valutazione finora
- Keep Burglars OutDocumento2 pagineKeep Burglars OutRishiNessuna valutazione finora
- Sample WordSample - WordDocumento1 paginaSample WordSample - WordAlvin TanNessuna valutazione finora
- Connect Wireless with eduroamDocumento5 pagineConnect Wireless with eduroamRishiNessuna valutazione finora
- Inventory List Van HasseltlaanDocumento1 paginaInventory List Van HasseltlaanRishiNessuna valutazione finora
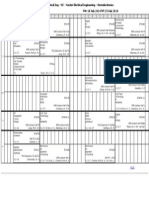
- TU Delft Time Table3 - 1Documento1 paginaTU Delft Time Table3 - 1RishiNessuna valutazione finora
- Eduroam For MobileDocumento2 pagineEduroam For MobileRishiNessuna valutazione finora
- Five Minute Guide To LatexDocumento6 pagineFive Minute Guide To LatexΚΛΕΑΝΘΗΣ ΜΑΝΩΛΟΠΟΥΛΟΣNessuna valutazione finora
- LPF CurvesDocumento1 paginaLPF CurvesRishiNessuna valutazione finora
- Airport MapDocumento1 paginaAirport MapRishiNessuna valutazione finora
- Bode PlotDocumento19 pagineBode Plotkoolking786Nessuna valutazione finora
- MOSFET Amplifier Large Signal Analysis: Circuits ElectronicsDocumento21 pagineMOSFET Amplifier Large Signal Analysis: Circuits ElectronicsRishiNessuna valutazione finora
- Connect Wireless with eduroamDocumento5 pagineConnect Wireless with eduroamRishiNessuna valutazione finora
- 6 Bass Sequencing Tricks From Daft PunkDocumento4 pagine6 Bass Sequencing Tricks From Daft PunkDustinNguyenNessuna valutazione finora
- Blinded Tab by As I Lay Dying - Rhythm L - Distortion Guitar Songsterr Tabs With Rhythm 2Documento1 paginaBlinded Tab by As I Lay Dying - Rhythm L - Distortion Guitar Songsterr Tabs With Rhythm 2Daniel GonzálezNessuna valutazione finora
- Major and Minor Scales by J.K. MertzDocumento21 pagineMajor and Minor Scales by J.K. Mertzwilburroberts20034852100% (10)
- Understanding Pixel DEFECT in TFT Flat Panel MonitorsDocumento12 pagineUnderstanding Pixel DEFECT in TFT Flat Panel Monitorsdann222Nessuna valutazione finora
- Christmas in Ritual and Tradition, Christian and Pagan by Miles, Clement A.Documento280 pagineChristmas in Ritual and Tradition, Christian and Pagan by Miles, Clement A.Gutenberg.orgNessuna valutazione finora
- Appreciating Contemporary ArtsDocumento14 pagineAppreciating Contemporary ArtsluckykunoNessuna valutazione finora
- Deh-X9550bt Deh-X9550sd Operating Manual Eng-Esp-PorDocumento156 pagineDeh-X9550bt Deh-X9550sd Operating Manual Eng-Esp-PorBernabe AcostaNessuna valutazione finora
- Modulo FRSky FutabaFM para 2 4Documento2 pagineModulo FRSky FutabaFM para 2 4AltemarFernandesdeOliveiraNessuna valutazione finora
- Ganesh Automobiles price list and order formDocumento13 pagineGanesh Automobiles price list and order formSiddharth HandaNessuna valutazione finora
- Postmodernism: A Movement Away From ModernismDocumento9 paginePostmodernism: A Movement Away From ModernismGerald DicenNessuna valutazione finora
- Ed Sheeran LyricsDocumento1 paginaEd Sheeran LyricspyulovincentNessuna valutazione finora
- Gingerbread Boy PDFDocumento2 pagineGingerbread Boy PDFKris BacsoNessuna valutazione finora
- Art Appreciation 5Documento8 pagineArt Appreciation 5Asher SarcenoNessuna valutazione finora
- A530550308 - 17023 - 31 - 2019 - Mimo 1Documento5 pagineA530550308 - 17023 - 31 - 2019 - Mimo 1giriNessuna valutazione finora
- Two Channel DDS Signal Generator User ManualDocumento6 pagineTwo Channel DDS Signal Generator User Manualanon_434678235Nessuna valutazione finora
- Poems For Practice AnnotationDocumento6 paginePoems For Practice AnnotationxxpolxxNessuna valutazione finora
- Wisemen Chords by James Blunt at Ultimate-Guitar - ComDocumento3 pagineWisemen Chords by James Blunt at Ultimate-Guitar - ComjonjammyNessuna valutazione finora
- Mario Bross Duet Piano 2Documento3 pagineMario Bross Duet Piano 2reckyNessuna valutazione finora
- Tower InfoDocumento2 pagineTower Infoparasara66Nessuna valutazione finora
- Arthur Berger Explores Television GenresDocumento11 pagineArthur Berger Explores Television GenresChike NgwuNessuna valutazione finora
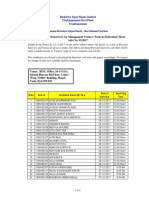
- Vizag Steel Interview Schedule HyderabadDocumento4 pagineVizag Steel Interview Schedule HyderabadKabya SrivastavaNessuna valutazione finora
- Abstract and Keywords: and The Oxford Handbook of Choral Pedagogy Frank Abrahams Paul D. HeadDocumento8 pagineAbstract and Keywords: and The Oxford Handbook of Choral Pedagogy Frank Abrahams Paul D. HeadDainius JakubauskasNessuna valutazione finora
- Lesson 1-GREEK THEATERDocumento44 pagineLesson 1-GREEK THEATERGina100% (1)
- Ivan KUZMINSKYI History of The Origin of The Bogurodzica Song. A Musical Monument of 1407Documento15 pagineIvan KUZMINSKYI History of The Origin of The Bogurodzica Song. A Musical Monument of 1407Іван КузьмінськийNessuna valutazione finora
- CertsDocumento8 pagineCertsJomar Mapue PormentoNessuna valutazione finora
- 07 Int Adp ChartDocumento11 pagine07 Int Adp ChartMarselina Lena LestariNessuna valutazione finora
- PLL DeansBook Second EditionDocumento185 paginePLL DeansBook Second EditionJun HeoNessuna valutazione finora
- Music of LuzonDocumento27 pagineMusic of LuzonLau DomondonNessuna valutazione finora
- Test OdtDocumento4 pagineTest OdtkanwaljitsinghchanneyNessuna valutazione finora