Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Coordenadas Curvilineas y Calculo Vectorial
Caricato da
sombrerodepajaTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Coordenadas Curvilineas y Calculo Vectorial
Caricato da
sombrerodepajaCopyright:
Formati disponibili
Captulo 5
Coordenadas Curvilneas, Campos y
operadores diferenciales
205
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
5.1. Disgreci on Derivativa
Los vectores podran ser constantes o variables. Ahora bien esa caracterstica se vericara tanto en las
componentes como en la base. Esto quiere decir que cuando un vector es variable podran variar su modulo, su
direccion, su sentido o todo junto o separado. Obviamente esta variabilidad del vector dependera de la base
en la cual se exprese, por lo cual un vector podra tener una componente constante en una base y constante
en otra.
[a
(t)
= a
k
(t) [e
k
(t)
= a
k
[e
k
(t)
= a
k
(t) [e
k
De esta manera, cuando uno piensa en un vector variable [a
(t)
a (t) uno rapidamente piensa en establecer
un cociente incremental
lm
t0
[a
(t+t)
[a
(t)
t
= lm
t0
[a
(t)
t
=
d
_
[a
(t)
_
dt
lm
t0
a (t + t) a (t)
t
= lm
t0
a (t)
t
=
da (t)
dt
La misma propuesta se cumplira para las formas diferenciales
(t)
a[ . Como siempre, las propiedades de esta
operacion seran
d
_
[a
(t)
+[b
(t)
_
dt
=
d
_
[a
(t)
_
dt
+
d
_
[b
(t)
_
dt
d
_
(t) [a
(t)
_
dt
=
d ((t))
dt
[a
(t)
+ (t)
d
_
[a
(t)
_
dt
d
_
(t)
a [b
(t)
_
dt
=
_
d
_
(t)
a[
_
dt
_
[b
(t)
+a[
(t)
_
_
d
_
[b
(t)
_
dt
_
_
Ahora bien, esto implica que
[a
(t)
= a
k
(t) [e
k
(t)
=
d
_
[a
(t)
_
dt
=
d
_
a
k
(t) [e
k
(t)
_
dt
=
d a
k
(t)
dt
[e
k
(t)
+ a
k
(t)
d
_
[e
k
(t)
_
dt
con lo cual hay que tener cuidado al derivar vectores y cerciorarse de la dependencia funcional de base y
componentes. Habra sistemas de coordenadas (bases de vectores) que sean constantes y otros con bases
variables. As, el radio vector posicion de una partcula genera los vectores velocidad y aceleracion.
r = r (t) =v (t) =
d (r (t))
dt
=a (t) =
d (v (t))
dt
=
d
2
(r (t))
dt
2
ahora bien
r [r = r
P
[u
r
= x
P
[i + y
P
[j + z
P
[k con [u
r
= cos [i + sen [j
Hernandez & N u nez Universidad Industrial de Santander 206
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
si suponemos que la partcula describe un movimiento entonces
r
P
= r
P
(t)
= (t)
_
_
_
_
_
_
x = x(t)
y = y (t)
z = z (t)
; [u
r
= [u
r
(t)
;
[i = const
[j = const
[k = const
con lo cual
d ([u
r
)
dt
=
d (cos (t) [i + sen (t) [j)
dt
= (sen (t))
d (t)
dt
[i + cos (t)
d (t)
dt
[j
d ([u
r
)
dt
=
d (t)
dt
[(sen (t)) [i + cos (t) [j]
. .
|u
=
d (t)
dt
[u
ya que
|[u
r
| =
_
u
r
[u
r
=
_
[cos (t) i[ + sen (t) j[] [cos (t) [i + sen (t) [j] = 1
|[u
| =
_
u
[u
=
_
[(sen (t)) i[ + cos (t) j[] [(sen (t)) [i + cos (t) [j] = 1
y
u
r
[u
= u
[u
r
= [(sen (t)) i[ + cos (t) j[] [cos (t) i[ + sen (t) [j] = 0
Mas a un
d ([u
)
dt
=
d ((sen (t)) [i + cos (t) [j)
dt
= (cos (t) [i + sen (t) [j) =
d (t)
dt
[u
r
Con lo cual, una partcula que describe un movimiento generico vendra descrita en coordenadas cartesianas
por
r [r = x
P
(t) [i + y
P
(t) [j + z
P
(t) [k
y su velocidad sera
v (t) =
dr (t)
dt
=
d ([r)
dt
=
d (x
P
(t) [i + y
P
(t) [j + z
P
(t) [k)
dt
=
d (x
P
(t))
dt
[i +
d (y
P
(t))
dt
[j +
d (z
P
(t))
dt
[k = v
xP
(t) [i + v
yP
(t) [j + v
zP
(t) [k
y la aceleracion
a (t) =
d (v
xP
(t))
dt
[i +
d (v
yP
(t))
dt
[j +
d (v
zP
(t))
dt
[k = a
xP
(t) [i + a
yP
(t) [j + a
zP
(t) [k
Mientras que en coordenadas polares sera
r [r = r
P
(t) [u
r
(t)
=v (t) =
d
_
r (t)
P
[u
r
(t)
_
dt
=
d (r (t)
P
)
dt
[u
r
(t)
+ r (t)
P
d
_
[u
r
(t)
_
dt
con lo cual la velocidad
v (t) = v
r
(t)
P
[u
r
(t)
+ r (t)
P
d (t)
dt
[u
Hernandez & N u nez Universidad Industrial de Santander 207
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
y la aceleracion
a (t) =
d (v (t))
dt
=
d
_
dr(t)
P
dt
[u
r
(t)
+ r (t)
P
d(t)
dt
[u
_
dt
=
d
_
v
r
(t)
P
[u
r
(t)
_
dt
+
d
_
r (t)
P
d(t)
dt
[u
_
dt
a (t) =
d
_
dr(t)
P
dt
_
dt
[u
r
(t)
+
dr (t)
P
dt
d
_
[u
r
(t)
_
dt
+
dr (t)
P
dt
d (t)
dt
[u
(t)
+ r (t)
P
d
2
(t)
dt
2
[u
(t)
+ r (t)
P
d (t)
dt
d
_
[u
(t)
_
dt
a (t) =
_
_
_
d
_
dr(t)
P
dt
_
dt
r (t)
P
_
d (t)
dt
_
2
_
_
_
[u
r
(t)
+
_
2
dr (t)
P
dt
d (t)
dt
+ r (t)
P
d
2
(t)
dt
2
_
[u
(t)
Claramente para el caso de un movimiento circular
r = R = const =
dR
dt
= 0 =
_
_
r (t) = R[u
r
(t)
v (t) = R
d(t)
dt
[u
a (t) = R
_
d(t)
dt
_
2
[u
r
(t)
+ R
d
2
(t)
dt
2
[u
(t)
De aqu podemos ver claramente que velocidad v (t) y posicion r (t) son ortogonales. La velocidad, v (t) ,
siempre es tangente a la trayectoria r (t) y en este caso la trayectoria es una circunsferencia. En general el
vector
r
med
=
i
r (t
i
) =
i
(r (t
i
+ t
i
) r (t
i
)) = lm
t0
i
r (t
i
) =
_
dr (t) = r (t)
es decir dr (t) = lm
t0
i
r (t
i
) es tangente a la trayectoria. Es claro que
dr (t) = d [x
P
(t) [i + y
P
(t) [j + z
P
(t) [k]
_
x
P
(t)
t
[i +
y
P
(t)
t
[j +
z
P
(t)
t
[k
_
dt
5.2. Curvas y parametros
Podemos generalizar esta armacion y considerar un parametro generico , en este caso
r = r (x
P
() , y
P
() , z
P
()) =
dr (x
P
() , y
P
() , z
P
()) =
_
r
x
P
()
x
P
()
+
r
y
P
()
y
P
()
+
r
z
P
()
z
P
()
_
d
=
_
x
P
()
r
x
P
()
+
y
P
()
r
y
P
()
+
z
P
()
r
z
P
()
_
d
Hernandez & N u nez Universidad Industrial de Santander 208
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
con lo cual
d ()
d
=
x
P
()
()
x
P
()
+
y
P
()
()
y
P
()
+
z
P
()
()
z
P
()
con lo cual podemos considerar las cantidades
_
x
P
()
,
y
P
()
,
z
P
()
_
como las componentes del vector,
dr () , (y en general del operador
d()
d
) tangente a la trayectoria parametrizada con .
Mas a un las cantidades
_
()
x
P
()
,
()
x
P
()
,
()
z
P
()
_
seran los vectores base en esas coordenadas.
As al considerar coordenadas generalizadas
_
q
1
() , q
2
() , q
3
()
_
[r =r =r
_
q
1
() , q
2
() , q
3
()
_
dr
_
q
1
() , q
2
() , q
3
()
_
=
q
1
()
d
r
q
1
()
+
q
2
()
d
r
q
2
()
+
q
3
()
d
r
q
3
()
dr
d
=
q
1
()
r
q
1
()
. .
|q
1
+
q
2
()
r
q
2
()
. .
|q
2
+
q
3
()
r
q
3
()
. .
|q
3
donde
_
q
1
_
=
r
q
1
()
,
q
2
_
=
r
q
2
()
,
q
3
_
=
r
q
3
()
,
_
son la base de vectores.
Por otro lado el modulo del vector |dr ()| representara la longitud de arco ds para esa curva. Por
consiguiente
ds
2
= dr() [dr() =
d dr()[
d
d [dr()
d
(d)
2
=
q
i
dr()[
q
i
q
j
[dr()
q
j
(d)
2
=
dr()[
q
i
[dr()
q
j
q
i
d
. .
dq
i
q
j
d
. .
dq
j
=
dr()[
q
i
[dr()
q
j
dq
i
dq
j
donde
dr()
d
es el vector tangente a la curva. Dado que
(ds)
2
= g
ij
dx
i
dx
j
= g
ij
d x
i
d x
j
= g
ij
dq
i
dq
j
=
dr()[
q
i
[dr()
q
j
. .
gij
dq
i
dq
j
identicamos claramente
dr()[
q
i
[dr()
q
j
g
ij
Hernandez & N u nez Universidad Industrial de Santander 209
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
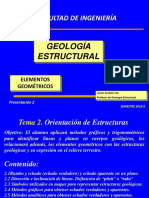
Figura 5.1: Coordenadas Curvilneas en 2D.
Cuadrante I, coordenadas cilndricas x = cos ; y = sen ; z = z
Cuadrante II, coordenadas cilndricas elpticas x = a cosh ucos v; y = a senh usen v; z = z
Cuadrante III coordenadas cilndricas parabolicas x =
1
2
_
u v
2
_
; y = uv; z = z
Cuadrante IV coordenadas cilndricas bipolares x
2
+ (y a cot u)
2
= a
2
csc
2
u;
_
x a
senh v
cosh v
_
2
+
y
2
=
a
2
senh
2
v
; z = z
5.3. Coordenadas Curvilneas Generalizadas
Como hemos visto siempre se podra denir un sistema de coordenadas generalizadas
_
q
1
, q
2
, q
3
_
tales que
[r =r =r
_
q
1
, q
2
, q
3
_
=dr =
r
q
1
dq
1
+
r
q
2
dq
2
+
r
q
3
dq
3
=
(ds)
2
= g
ij
dx
i
dx
j
drdr =
r
q
i
r
q
j
dq
i
dq
j
=
_
_
g
ij
=
r
q
i
r
q
j
[e
j
=
1
|r
q
j
|r
q
j
genere una trada de vectors base [e
j
ortonormales de vectores unitarios tales que
[e
1
=
1
_
_
_
|r
q
1
_
_
_
[r
q
1
; [e
2
=
1
_
_
_
|r
q
2
_
_
_
[r
q
2
; [e
3
=
1
_
_
_
|r
q
3
_
_
_
[r
q
3
;
los cuales son vectores tangentes a las curvas que dene el radio vector [r. Claramente si el sistema es
ortogonal los factores de escala son importantes para su categorizacion
h
1
=
_
_
_
_
[r
q
1
_
_
_
_
; h
2
=
_
_
_
_
[r
q
2
_
_
_
_
; y h
3
=
_
_
_
_
[r
q
3
_
_
_
_
;
Hernandez & N u nez Universidad Industrial de Santander 210
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
con lo cual podemos denir el elemento de lnea como
ds
2
=
_
h
1
dq
1
_
2
+
_
h
2
dq
2
_
2
+
_
h
3
dq
3
_
2
=
dr()[
q
i
[dr()
q
j
dq
i
dq
j
= g
ij
dq
i
dq
j
Es decir que identicamos la metrica como
h
1
=
x
q
1
=
x
1
q
1
=
g
11
; h
2
=
y
q
2
=
x
2
q
2
=
g
22
; h
3
=
z
q
3
=
x
3
q
3
=
g
33
.
De tal forma que los casos particulares se recuperan facilmente.
5.3.1. Coordenadas generalizadas, vectores y formas
Recordando como construimos el desplazamiento para una base generica ortogonal, [e
j
de un espacio
vectorial con producto interno, el desplazamiento innitesimal puede expresarse como
ds
2
dr [dr =
_
d x
k
e
k
_
(d x
m
[e
m
) =
e
k
[e
m
d x
k
d x
m
= d x
m
d x
m
= g
km
d x
k
d x
m
Donde hemos utilizado el hecho que la metrica nos permite asociar componentes contravariantes a covariantes
y viceversa, es decir establece una relacion entre formas y vectores.
Si las bases de formas y vectores son ortogonales la metrica sera diagonal y como en general
_
_
_
|dr()
q
j
_
_
_ ,= 1,
entoces surgen los llamados factores de escala h
i
= g
ii
Entonces, una vez mas, una forma b[ o, un vector [a cualquiera puede expresarse como una combinacion
lineal de formas o vectores base
[a = a
j
[e
j
= a
j
[e
j
b[ = b
j
e
j
=
b
j
e
j
con
a
j
=
e
j
[a ; a
j
=
e
j
[a ; b
j
= b [e
j
; y
b
j
= b [e
j
De esta manera las componentes covariantes y contravariantes estaran relacionadas como
a
j
= g
jk
a
k
a
i
= h
[i]
a
[i]
donde h
[i]
a
[i]
NO indica suma. En otras palabras, en aquellos sistemas de coordenadas en los cuales la metrica
es diagonal pero no viene representada por la matriz unidad, subir y bajar indices puede incluir los camibos
de escala.
5.3.2. Velocidades y Aceleraciones
Antes de pasar a analizar los casos particulares haremos un alto para expresar las expresiones de las
velocidades y las aceleraciones en coordenadas generalizadas. Para ello recordamos que los vectores velocidad
y aceleracion se representan como
[V = V
j
[e
j
= x
j
[e
j
=
V
j
[e
j
=
x
j
[e
j
y [a = a
j
[e
j
= x
j
[e
j
= a
j
[e
j
=
x
j
[e
j
respectivamente. Para determinar las expresiones de estos vectores en cualquier sistema de coordenadas, es
suciente con encontrar las expresiones de sus componentes contravariantes o contravariantes. Como sabemos,
podremos encontrar una a partir de las otras con la ayuda de la metrica del sistema de coordenadas.
Hernandez & N u nez Universidad Industrial de Santander 211
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Entonces, el vector velocidad en la base cartesiana se puede expresar como
[V = V
x
[+V
y
[+V
z
k
_
= x[+ y [+ z
k
_
= x
j
[e
j
= q
j
[e
j
con [e
1
= [ ; [e
2
= [ ; y [e
3
=
k
_
,
claramente las componentes contravariantes del vector velocidad en un sistema de coordenadas generalizado
son V
j
= q
j
Para encontrar las componentes covariantes recordamos que para cualquier base generalizada de vectores
o formas se expresan en termino de la base cartesiana (de vectores o formas) como
[e
j
=
x
i
q
j
[e
i
y
e
i
=
q
i
x
j
e
j
Entoces las componentes covariantes del vector velocidad en una base generalizada sera
V
j
= V [e
j
= ( x
m
e
m
[)
_
x
i
q
j
[e
i
_
= x
m
x
m
q
j
= x
m
x
m
t
q
j
t
= x
m
x
m
q
j
=
_
VmV
m
2
_
q
j
Con lo cual resulta facil expresar las componentes covariantes una vez que conocemos el modulo del vector
expresado en ese sistema de coordenadas. El cual siempre viene expresado a partir del diferencial
d [r
d [r
dt
Para encontrar la expresion para la aceleracion se procede de manera analoga.
a
j
= a [e
j
= ( x
m
e
m
[)
_
x
i
q
j
[e
i
_
= x
m
x
m
q
j
d
dt
_
x
m
x
m
q
j
_
x
m
x
m
q
j
y otra vez
x
m
q
j
=
x
m
q
j
a
j
=
d
dt
_
x
m
x
m
q
j
_
x
m
x
m
q
j
=
d
dt
_
q
j
_
x
m
x
m
2
__
q
j
_
x
m
x
m
2
_
y nalmente
a
j
=
d
dt
_
q
j
_
V
m
V
m
2
__
q
j
_
V
m
V
m
2
_
5.3.3. Coordenadas Cartesianas
El primer caso, el mas trivial, lo constituyen las coordenadas cartesianas. Vale decir
_
q
1
, q
2
, q
3
_
(x, y, z)
[r = x[i + y [j + z [k =r = x + y + z
k
r =r (x, y, z) =dr =
_
r
x
_
dx +
_
r
y
_
dy +
_
r
z
_
dz = dx[i + dy [j + dz [k
Hernandez & N u nez Universidad Industrial de Santander 212
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
cosecuentemente
h
x
=
_
_
_
|r
x
_
_
_ = 1
h
y
=
_
_
_
|r
y
_
_
_ = 1
h
z
=
_
_
_
|r
z
_
_
_ = 1
y
[e
x
=
1
|
|r
x
|
|r
x
= [i
[e
y
=
1
|
|r
y
|
|r
x
= [j
[e
z
=
1
|
|r
z
|
|r
z
= [k
;
El elemento de lnea viene denido como
(ds)
2
=
_
h
1
dx
1
_
2
+
_
h
2
dx
2
_
2
+
_
h
3
dx
3
_
2
ds
2
= dx
2
+ dy
2
+ dz
2
y el tensor metrico sera
g
11
= g
xx
= 1; g
22
= g
yy
= 1; g
22
= g
zz
= 1.
El hecho que para el caso de las coordenadas cartesianas h
x
= h
y
= h
z
= 1 signicara que las tomaremos
como coordenadas base respecto a las cuales expresaremos las demas.
5.3.4. Coordenadas Cilndricas
Las coordenadas cilndricas se expresan como
_
q
1
, q
2
, q
3
_
(, , z)
[r = x(, ) [i + y (, ) [j + z [k r = x(, ) + y (, ) + z
k
r =r (, , z) = dr =
_
r
_
d +
_
r
_
d +
_
r
z
_
dz
y estas cantidades pueden ser identicadas de las leyes de transformacion respecto a las coordendas carte-
sianas
x = x(, ) = cos
y = y (, ) = sen
z = z
_
_
=
dx = cos d sen d
dy = sen d + cos d
dz = dz
con lo cual es facil identicar
_
_
_
_
_
_
_
x(,)
= cos
y(,)
= sen
z
= 0
_
_
_
_
_
_
_
;
_
_
_
_
_
_
_
x(,)
= sen
y(,)
= cos
z
= 0
_
_
_
_
_
_
_
; y
_
_
_
_
_
_
x(,)
z
= 0
y(,)
z
= 0
z
z
= 1
_
_
_
_
_
_
y de all
h
=
_
_
_
_
[r
_
_
_
_
=
_
_
_
_
_
_
_
x(, ) + y (, ) + z
k
_
_
_
_
_
_
_
=
_
_
_
_
x(, )
+
y (, )
_
_
_
_
h
= |cos +sen | = 1
Hernandez & N u nez Universidad Industrial de Santander 213
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
y del mismo modo
h
=
_
_
_
_
(x(, ) + y (, ) )
_
_
_
_
= r; h
z
=
_
_
_
_
(z)
z
k
_
_
_
_
= 1.
mientras que los vectores unitarios seran
[e
=
1
|
|r
|
|r
=
x(,)
+
y(,)
= cos + sen
[e
=
1
|
|r
|
|r
=
1
_
x(,)
+
y(,)
_
= sen + cos
[e
z
=
1
|
|r
z
|
|r
z
=
(x(,)+y(,)+z
k)
z
=
k
;
El elemento de lnea viene denido como
(ds)
2
=
_
h
1
dx
1
_
2
+
_
h
2
dx
2
_
2
+
_
h
3
dx
3
_
2
ds
2
= d
2
+
2
d
2
+ dz
2
y el tensor metrico sera
g
11
= g
= 1; g
22
= g
=
2
; g
33
= g
zz
= 1.
5.3.5. Coordenadas Esfericas
Para construir el sistema de coordenadas esfericas
_
q
1
, q
2
, q
3
_
(r, , )
[r = x(r, , ) [i + y (r, , ) [j + z (r, , ) [k = x(r, , ) + y (r, , ) + z (r, , )
k
r = r (r, , ) = dr=
_
r
r
_
dr +
_
r
_
d +
_
r
_
d
y estas cantidades pueden ser identicadas de las leyes de transformacion respecto a las coordendas carte-
sianas
x = x(r, , ) = r cos sen
y = y (r, , ) = r sen sen
z (r, , ) = r cos
_
_
=
dx = cos sen dr r sen sen d + r cos cos d
dy = sen sen dr + r cos sen d + r sen cos d
dz = cos dr r sen d
con lo cual es facil identicar
_
_
_
_
_
_
_
x(r,,)
r
= cos sen
y(r,,)
r
= sen sen
z(r,,)
r
= cos
_
_
_
_
_
_
_
;
_
_
_
_
_
_
_
x(r,,)
= r sen sen
y(r,,)
= r cos sen
z(r,,)
= 0
_
_
_
_
_
_
_
;
_
_
_
_
_
_
_
x(r,,)
= r cos cos
y(r,,)
= r sen cos
z(r,,)
= r sen
_
_
_
_
_
_
_
Hernandez & N u nez Universidad Industrial de Santander 214
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
y de all
h
r
=
_
_
_
_
[r
r
_
_
_
_
=
_
_
_
_
_
_
_
x(r, , ) + y (r, , ) + z (r, , )
k
_
r
_
_
_
_
_
_
h
r
=
_
_
_
_
x(r, , )
r
+
y (r, , )
r
+
z (r, , )
r
k
_
_
_
_
h
r
=
_
_
_cos sen +sen sen +cos
k
_
_
_ =
_
cos
2
sen
2
+ sen
2
sen
2
+ cos
2
= 1
y del mismo modo
h
=
_
_
_
_
_
_
_
x(r, , ) + y (r, , ) + z (r, , )
k
_
_
_
_
_
_
_
=
_
_
_
_
x(r, , )
+
y (r, , )
_
_
_
_
h
= |r sen sen +r cos sen | =
_
(r sen sen )
2
+ (r cos sen )
2
= r sen
Finalmente,
h
=
_
_
_
_
_
_
_
x(r, , ) + y (r, , ) + z (r, , )
k
_
_
_
_
_
_
_
h
=
_
_
_
_
x(r, , )
+
y (r, , )
+
z (r, , )
k
_
_
_
_
h
=
_
_
_r cos cos +r sen cos sen
k
_
_
_
h
=
_
(r cos cos )
2
+ (r sen cos )
2
+ (r sen )
2
= r
mientras que los vectores unitarios seran
[e
r
=
1
|
|r
r
|
|r
r
= cos sen +sen sen +cos
k
[e
=
1
|
|r
|
|r
=
1
r sen
(r sen sen +r cos sen )
[e
=
1
|
|r
|
|r
=
1
r
_
r cos cos +r sen cos sen
k
_
;
El elemento de lnea viene denido como
(ds)
2
=
_
h
1
dx
1
_
2
+
_
h
2
dx
2
_
2
+
_
h
3
dx
3
_
2
ds
2
= dr
2
+ r
2
sen
2
d
2
+ r
2
d
2
Hernandez & N u nez Universidad Industrial de Santander 215
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
El tensor metrico sera
g
11
= g
rr
= 1; g
22
= g
= r
2
sen
2
; g
33
= g
= r
2
.
Por completidud, enumeraremos algunos otros sistemas de coordenadas y dejaremos al lector la labor de
calcular los vectores unitarios y la metrica del espacio expresada en estas coordenadas.
5.3.6. Otros Sistemas Coordenados
Coordenadas Toroidales
_
q
1
, q
2
, q
3
_
(, , ) ; [r = x(, , ) + y (, , ) + z (, , )
k
con
x = x(, , ) = r cos ; con r =
senh
cosh + cos
y = y (, , ) = r sen
z = z (, , ) = r
sen
cosh + cos
con lo cual los vectores unitarios seran
[e
=
1
|
|r
|
|r
=
1
(x(,,)+y(,,) +z(,,)
k)
(x(,,)+y(,,)+z(,,)
k)
[e
=
1
|
|r
|
|r
=
[e
=
1
|
|r
|
|r
=
;
Hernandez & N u nez Universidad Industrial de Santander 216
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
[r
=
__
senh
cosh +cos
_
cos
_
+
__
senh
cosh +cos
_
sen
_
+
__
senh
cosh +cos
_
sen
cosh +cos
_
k
[r
=
_
cosh cos + 1
cosh
2
+ 2 cosh cos + cos
2
_
(cos +sen )
sen
_
cosh
2
cosh cos 2
_
cosh
3
+ 3 cosh
2
cos + 3 cosh cos
2
+ cos
3
la metrica queda como
ds
2
= r
2
_
d
2
+ d
2
senh
2
_
Las supercies = const representan toros alrededor del eje z; las supercies = const son esferas con
centro sobre el eje z;y nalmente las supercies = const son planos que contiene al eje z
Coordenadas Elipsoidales
Dados tres n umeros a, b y c; con a > b > c > 0, la ecuacion
x
2
a
2
+
+
y
2
b
2
+
+
z
2
c
2
+
= 1
representa las supercies cuadricas
1
homofocales (es decir, con el mismo foco u origen en (x = 0, y = 0, z = 0)).
Dependiendo del valor del parametro , estas ecuaciones representaran supercies
Elipsoides si > c
2
Hiperboloides de una hoja si c
2
> > b
2
Hiperboloides de dos hojas si b
2
> > c
2
Esto quiere decir que por cada punto (x, y, z) del espacio, pasan tres supercies cuadricas (dependiendo del
valor de ). Conocidos a, b y c y el punto, (x = x
0
, y = y
0
, z = z
0
) , los valores de vienen dados por las
races de la ecuacion c ubica
x
2
a
2
+
+
y
2
b
2
+
+
z
2
c
2
+
= 1 =
3
+
2
+ + = 0
con
= x
2
0
+ y
2
0
+ z
2
0
a
2
b
2
c
2
=
_
b
2
+ c
2
_
x
2
0
+
_
a
2
+ c
2
_
y
2
0
+
_
a
2
+ b
2
_
z
2
0
a
2
b
2
_
a
2
+ b
2
_
c
2
= x
2
0
b
2
c
2
+ y
2
0
a
2
c
2
+ z
2
0
a
2
b
2
a
2
b
2
c
2
Las races de esta ecuacion (
1
= ;
2
= ;
3
= ) denen las coordenadas elipsoidales del punto (x, y, z) =
(x(, , ) , y (, , ) , z (, , ))
_
q
1
, q
2
, q
3
_
(, , ) ; [r = x(, , ) + y (, , ) + z (, , )
k
1
Notese que la proyeccion de estas supercies en el plano (x, y) representan curvas conicas homofocales
Hernandez & N u nez Universidad Industrial de Santander 217
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
y la ley de transformacion queda como
x = x(, , ) =
(a
2
+ ) (a
2
+ ) (a
2
+ )
(a
2
b
2
) (a
2
c
2
)
y = y (, , ) =
(b
2
+ ) (b
2
+ ) (b
2
+ )
(b
2
a
2
) (b
2
c
2
)
z = z (, , ) =
(c
2
+ ) (c
2
+ ) (c
2
+ )
(c
2
b
2
) (c
2
a
2
)
por cual la metrica sera
ds
2
=
( ) ( )
4 (a
2
+ ) (b
2
+ ) (c
2
+ )
d
2
+
( ) ( )
4 (a
2
+ ) (b
2
+ ) (c
2
+ )
d
2
+
( ) ( )
4 (a
2
+ ) (b
2
+ ) (c
2
+ )
d
2
5.4. Vectores, Tensores, Metrica y Transformaciones
Nos toca ahora construir expresiones de vectores y tensores a partir de sus leyes de transformacion, hemos
dicho que los vectores y los tensores son independiente del sistema de coordenadas (la base) en la cual se
exprese.
5.4.1. Transformando Vectores
As si dada dos bases de vectores coordenados [e
1
, [e
2
, [e
3
y [e
1
, [e
2
, [e
3
para el espacio vectorial
1
3
Entonces, se cumple que:
[a = a
j
[e
j
= a
i
[e
i
=
_
e
i
a = a
i
e
i
a = a
i
_
= a
i
= a
j
e
i
[e
j
a
i
=
x
i
x
j
. .
e
i
|ej
a
j
con ello de cartesianas a cilndricas
x = x(r, ) = cos ; y = y (r, ) = sen ; z = z
de lo cual se deriva
_
_
_
_
_
_
_
x(,)
= cos
y(,)
= sen
z
= 0
_
_
_
_
_
_
_
;
_
_
_
_
_
_
_
x(,)
= sen
y(,)
= cos
z
= 0
_
_
_
_
_
_
_
; y
_
_
_
_
_
_
x(,)
z
= 0
y(,)
z
= 0
z
z
= 1
_
_
_
_
_
_
Hernandez & N u nez Universidad Industrial de Santander 218
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Entonces dados
[a = a
j
[e
j
= a
1
[e
1
+ a
2
[e
2
+ a
3
[e
3
= a
x
[i + a
y
[j + a
z
[k
[a = a
i
[e
i
= a
1
[e
1
+ a
2
[e
2
+ a
3
[e
3
= a
r
[e
r
+ a
[e
+ a
z
[e
z
con
[e
=
1
|
|r
|
|r
=
x(,)
+
y(,)
= cos + sen
[e
=
1
|
|r
|
|r
=
1
_
x(,)
+
y(,)
_
= sen + cos
[e
z
=
1
|
|r
z
|
|r
z
=
(x(,)+y(,)+z
k)
z
=
k
;
Si tenemos en concreto un vector [a = 5 [i + 4 [j + 3 [k quisieramos conocer su expresion en coordenadas
cilndricas. Hay que hacer la acotacion que existe una familia de sistemas de coordenados cilndricos para-
metrizados por el angulo y NO un unico sistema coordenado. Obviamente se puede especicar el sistema
coordenado y entonces tendremos un conjunto de componentes denito. As la familia de componentes en
cilndricas del vector [a seran
a
j
=
e
j
[a =
e
j
_
a
1
[e
1
+ a
2
[e
2
+ a
3
[e
3
_
=
e
j
_
a
1
[e
1
+ a
2
[e
2
+ a
3
[e
3
_
con lo cual al expresar los vectores base
a
1
= a
= e
[ (5 [i + 4 [j + 3 [k) = (cos + sen )
_
5 + 4 + 3
k
_
= 5 cos + 4 sen
a
2
= a
= e
[ (5 [i + 4 [j + 3 [k) = (sen + cos )
_
5 + 4 + 3
k
_
= 5 sen + 4 cos
a
3
= a
z
= e
z
[ (5 [i + 4 [j + 3 [k) = k[ (5 [i + 4 [j + 3 [k) = 3
con lo cual
[a = 5 [i + 4 [j + 3 [k = (5 cos + 4 sen ) [e
+ (5 sen + 4 cos ) [e
+ 3 [e
z
donde es claro que existen innitos sistemas cilindricos parametrizados por el angulo , digamos
= arctan
_
4
5
_
_
a
= 5 cos
_
arctan
_
4
5
__
+ 4 sen
_
arctan
_
4
5
__
=
25
41
41 +
16
41
41 =
41
a
= 5 sen
_
arctan
_
4
5
__
+ 4 cos
_
arctan
_
4
5
__
=
_
20
41
41
_
+
_
20
41
41
_
= 0
a
z
= 3
con lo cual hemos alineado el eje [e
a lo largo del vector [a . Ese es un sistema de coordenadas cilindrico
muy particular.
Hernandez & N u nez Universidad Industrial de Santander 219
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
5.4.2. Transformando Tensores
Ilustremos ahora las transformaciones de tensores bajo cambios de la base del espacio vectorial.
Consideremos el siguiente tensor
[e
1
, [e
2
, [e
3
[i , [j , [k =T
i
j
=
_
_
2 1 3
2 3 4
1 2 2
_
_
Es decir es un tensor que hemos expresado en coordenadas cartesianas y queremos pasarlo a cilindricas. Para
ello recordamos que
T
k
m
=
x
k
x
i
x
j
x
m
T
i
j
donde
_
_
_
_
x
1
= x = x(, ) = cos
x
2
= y = y (, ) = sen
x
3
= z = z
_
_
x
1
= = (x, y) =
_
x
2
+ y
2
x
2
= = (x, y) = arctan
_
y
x
_
x
3
= z = z
con lo cual
x
k
x
i
=
_
_
_
_
_
_
_
_
x
1
x
1
=
x
=
x
x
2
+y
2
x
1
x
2
=
y
=
y
x
2
+y
2
x
1
x
3
=
z
= 0
x
2
x
1
=
x
=
y
x
2
+y
2
x
2
x
2
=
y
=
x
x
2
+y
2
x
2
x
3
=
z
= 0
x
3
x
1
=
z
x
= 0
x
3
x
2
=
z
y
= 0
x
3
x
3
=
z
z
= 1
_
_
_
_
_
_
_
_
es decir
x
k
x
i
=
_
_
_
_
_
_
cos sen 0
sen
cos
0
0 0 1
_
_
_
_
_
_
mientras que
x
j
x
m
=
_
_
_
_
_
_
_
x
1
x
1
=
x
= cos
x
1
x
2
=
x
= sen
x
1
x
3
=
x
z
= 0
x
2
x
1
=
y
= sen
x
2
x
2
=
y
= cos
x
2
x
3
=
y
z
= 0
x
3
x
1
=
z
= 0
x
3
x
2
=
z
= 0
x
3
x
3
=
z
z
= 1
_
_
_
_
_
_
_
con lo cual
x
j
x
m
=
_
_
_
_
_
_
cos sen 0
sen cos 0
0 0 1
_
_
_
_
_
_
Hernandez & N u nez Universidad Industrial de Santander 220
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Por lo tanto
T
k
m
=
x
k
x
i
T
i
j
x
j
x
m
T
k
m
=
_
_
_
_
_
_
cos sen 0
sen
cos
0
0 0 1
_
_
_
_
_
_
T
i
j
_
_
_
_
_
_
cos sen 0
sen cos 0
0 0 1
_
_
_
_
_
_
es decir
T
k
m
=
_
_
cos sen 0
sen
cos
0
0 0 1
_
_
_
_
2 1 3
2 3 4
1 2 2
_
_
_
_
cos sen 0
sen cos 0
0 0 1
_
_
T
k
m
=
_
_
cos
2
+ 3 cos sen + 3 sen cos 2 + 3 cos
2
3 cos + 4 sen
cos sen +3 cos
2
1
3 cos sen + cos
2
+ 2 3
sen
+ 4
cos
cos + 2 sen sen + 2 cos 2
_
_
Si suponemos que el origen del sistema de coordenadas cilindrico esta en el vector anterior. Esto es
[a = 5 [i + 4 [j + 3 [k
_
_
_
=
_
x
2
+ y
2
=
5
2
+ 4
2
=
41
= arctan
_
y
x
_
= arctan
_
4
5
_
= 0,67474 rad
y entonces
T
k
m
=
_
_
3,8537 2,030 3 4,841 4
0,20569 1. 146 3 0,195 12
2,030 3 6,0 2
_
_
Si consideramos una nueva base
[e
1
, [e
2
, [e
3
_
_
[e
1
= [i
[e
2
= [i +[j
[e
3
= [i +[j +[k
_
_
_
_
_
_
e
1
[e
1
= 1
e
1
[e
2
= 1
e
1
[e
3
= 1
e
2
[e
1
= 1
e
2
[e
2
= 2
e
2
[e
3
= 2
e
3
[e
1
= 1
e
3
[e
2
= 2
e
3
[e
3
= 3
_
_
_
_
_
_
para ese mismo espacio 1
3
encontraremos una nueva expresion que toma T
i
j
en esa base. Igualmente encontra-
remos las expresiones para los siguientes tensores:
T
j
i
,
T
ij
,
T
ij
. Notese que esta nueva base no es ortogonal
,
e
k
[e
i
, =
k
i
, con lo cual no se cumplen muchas cosas entre ellas [e
k
e
k
,= 1
Para encontrar la expersion
T
i
j
expresamos los vectores base [e
1
, [e
2
, [e
3
[i , [j , [k en termino
de la base [e
1
, [e
2
, [e
3
[e
1
, [e
2
, [e
3
=
_
_
[e
1
= [i = [e
1
[e
2
= [j = [e
2
[e
1
[e
3
= [k = [e
3
[e
2
recordamos que un vector generico
[a = a
j
[e
j
= a
j
[e
j
=
[a = a
j
[e
j
= a
1
[e
1
+ a
2
[e
2
+ a
3
[e
3
= a
1
[e
1
+ a
2
([e
1
+[e
2
) + a
3
([e
1
+[e
2
+[e
3
)
Hernandez & N u nez Universidad Industrial de Santander 221
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
con lo cual
a
1
[e
1
+ a
2
[e
2
+ a
3
[e
3
=
_
a
1
+ a
2
+ a
3
_
[e
1
+
_
a
2
+ a
3
_
[e
2
+ a
3
[e
3
y como
a
1
= a
1
+ a
2
+ a
3
a
2
= a
2
+ a
3
a
3
= a
3
_
_
_
=a
i
=
x
i
x
k
a
k
=
_
_
x
1
x
1
= 1;
x
1
x
2
= 1;
x
1
x
3
= 1;
x
2
x
1
= 0;
x
2
x
2
= 1;
x
2
x
3
= 1;
x
3
x
1
= 0;
x
3
x
2
= 0;
x
3
x
3
= 1;
Es de hacer notar que dado que la base ortonormal [e
1
, [e
2
, [e
3
[i , [j , [k se tiene que
[a = a
j
[e
j
= a
i
[e
i
=
e
i
a = a
j
e
i
[e
j
= a
j
i
j
= a
i
= a
k
e
i
[e
k
=
x
i
x
k
=
e
i
[e
k
El mismo procedimiento se puede aplicar para expresar el vector [a como combinacion lineal de los vectores
[e
j
[a = a
j
[e
j
= a
j
[e
j
= a
1
[e
1
+ a
2
[e
2
+ a
3
[e
3
= a
1
[e
1
+ a
2
([e
2
[e
1
) + a
3
([e
3
[e
2
)
a
1
= a
1
a
2
a
2
= a
2
a
3
a
3
= a
3
_
_
_
= a
k
= a
i
x
k
x
i
=
_
_
x
1
x
1
= 1;
x
1
x
2
= 1;
x
1
x
3
= 0;
x
2
x
1
= 0;
x
2
x
2
= 1;
x
2
x
3
= 1;
x
3
x
1
= 0;
x
3
x
2
= 0;
x
3
x
3
= 1;
Notese que, como era de esperarse,
x
i
x
k
x
k
x
j
=
i
j
=
_
_
1 1 1
0 1 1
0 0 1
_
_
_
_
1 1 0
0 1 1
0 0 1
_
_
=
_
_
1 0 0
0 1 0
0 0 1
_
_
Con las expresiones matriciales para las transformaciones ,estamos en capacidad de calcular, componente a
componente, las representacion del tensor en la nueva base con lo cual
T
k
m
=
x
k
x
i
x
j
x
m
T
i
j
=
T
1
1
=
x
1
x
i
x
j
x
1
T
i
j
=
x
1
x
1
_
x
1
x
1
T
1
1
+
x
2
x
1
T
1
2
+
x
3
x
1
T
1
3
_
+
x
1
x
2
_
x
1
x
1
T
2
1
+
x
2
x
1
T
2
2
+
x
3
x
1
T
2
3
_
+
x
1
x
3
_
x
1
x
1
T
3
1
+
x
2
x
1
T
3
2
+
x
3
x
1
T
3
3
_
es decir
T
1
1
=
x
1
x
i
x
j
x
1
T
i
j
= 1
_
1 T
1
1
+ 0 T
1
2
+ 0 T
1
3
_
1
_
1 T
2
1
+ 0 T
2
2
+ 0 T
2
3
_
+0
_
1 T
3
1
+ 0 T
3
2
+ 0 T
3
3
_
T
1
1
=
x
1
x
i
x
j
x
1
T
i
j
= T
1
1
T
2
1
= 2 2 = 0
Hernandez & N u nez Universidad Industrial de Santander 222
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
del mismo modo
T
1
2
=
x
1
x
i
x
j
x
2
T
i
j
=
x
1
x
1
_
x
1
x
2
T
1
1
+
x
2
x
2
T
1
2
+
x
3
x
2
T
1
3
_
+
x
1
x
2
_
x
1
x
2
T
2
1
+
x
2
x
2
T
2
2
+
x
3
x
2
T
2
3
_
+
x
1
x
3
_
x
1
x
2
T
3
1
+
x
2
x
2
T
3
2
+
x
3
x
2
T
3
3
_
es decir
T
1
2
=
x
1
x
i
x
j
x
2
T
i
j
= 1
_
1 T
1
1
+ 1 T
1
2
+ 0 T
1
3
_
1
_
1 T
2
1
+ 1 T
2
2
+ 0 T
2
3
_
+0
_
1 T
3
1
+ 1 T
3
2
+ 0 T
1
3
_
T
1
2
=
x
1
x
i
x
j
x
1
T
i
j
=
_
T
1
1
+ T
1
2
_
_
T
2
1
+ T
2
2
_
= (2 + 1) (2 + 3) = 2
se puede continuar termino a termino o realizar la multiplicacion de las matrices
x
k
x
i
, T
i
j
y
x
j
x
m
provenientes
de la transformacion de componentes de tensores. Vale decir
T
k
m
=
x
k
x
i
T
i
j
x
j
x
m
_
_
1 1 0
0 1 1
0 0 1
_
_
_
_
2 1 3
2 3 4
1 2 2
_
_
_
_
1 1 1
0 1 1
0 0 1
_
_
=
_
_
0 2 3
1 2 4
1 3 5
_
_
hay que resaltar un especial cuidado que se tuvo en la colocacon de la matrices para su multiplicacion. Si
bien en la expresion
T
k
m
=
x
k
x
i
x
j
x
m
T
i
j
las cantidades
x
k
x
i
son n umeros y no importa el orden con el cual
se multipliquen, cuando se colocan como matrices debe respetarse la concatenacion interna de ndices.
Esto es cuando querramos expresar
T
k
m
como una matriz, donde el ndice contravariante k indica las y el
ndice covariante m las columnas, jamos primero estos ndices y luego respetamos la concatenacionndices
covariantes con los contravariantes. Esta es la convencion para expresar la multiplicacion de matrices en la
notacion de ndices
2
. Esto es
T
k
m
=
x
k
x
i
x
j
x
m
T
i
j
=
T
k
m
=
x
k
x
i
T
i
j
x
j
x
m
Ahora los objetos
x
k
x
i
, T
i
j
y
x
j
x
m
pueden ser sustitidos (en sus puestos correspondientes) por su represen-
tacion matricial.
Con lo cual hemos encontrado la respresentacion matricial
T
k
m
de las componentes del tensor T en la
base [e
1
, [e
2
, [e
3
_
_
T
1
1
= 0
T
1
2
= 2
T
1
2
= 3
T
2
1
= 1
T
2
2
= 2
T
2
3
= 4
T
3
1
= 1
T
3
2
= 3
T
3
3
= 5
_
_
Para encontrar la expresion para
T
km
recordamos que
T
km
= g
kn
T
n
m
es decir, requerimos las componentes
covariantes y contravariantes del tensor metrico g
kn
que genera esta base. Para ello recordamos que para
para una base generica, [e
j
, no necesariamente ortogonal, de un espacio vectorial con producto interno,
2
Quiza una forma de comprobar si los ndices esta bien concatenados se observa si se bajan los ndices contravariantes
pero se colcan de antes que los covariantes. Esto es T
i
j
T
ij
As la multiplicacion de matrices queda representada por
C
i
j
= A
i
k
B
k
j
C
ij
= A
ik
B
kj
y aqu es claro que nidices consecutivos estan concatenados e indican multiplicacion
Hernandez & N u nez Universidad Industrial de Santander 223
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
podemos denir la expresion de un tensor
_
0
2
_
que denominaremos tensor metrico como
g
_
_
|ei
,
|ej
,
_
_
= g
ij
g
ji
= g
ij
g
ji
= g [[e
i
, [e
j
] e
i
[e
j
e
j
[e
i
g
_
_
e
i
[
,
e
j
[
_ = g
ij
g
ij
= g
ij
g
ij
= ( g
ij
)
1
Es de hacer notar que la representacion matricial para la metrica covariante g
ij
de una base ortonormal
[e
1
, [e
2
, [e
3
[i , [j , [k es siempre diagonalEsto es
g
11
= e
1
[e
1
= i [i = 1; g
12
= e
1
[e
2
= i [j = 0; g
13
= e
1
[e
2
= i [j = 0;
g
21
= e
2
[e
1
= j [i = 0; g
22
= e
2
[e
2
= j [j = 1 n; g
23
= e
2
[e
3
= j [k = 0;
g
31
= e
3
[e
1
= k [i = 0; g
32
= e
3
[e
2
= k [j = 0; g
33
= e
3
[e
3
= k [k = 1;
con lo cual
T
n
m
T
km
g
kn
T
n
m
T
nm
g
nk
T
m
k
_
_
_
=
_
_
0 2 3
1 2 4
1 3 5
_
_
donde hemos denotado como la representacion matricial del objeto
Para el caso de la base generica no ortonormal [e
j
tenemos dos formas de calcular el tensor (las
componentes covariantes y contravariantes) del tensor metrico. La primera es la forma directa
g
11
= e
1
[e
1
= i [i = 1; g
12
= e
1
[e
2
= i[ ([i +[j) = 1;
g
21
= e
2
[e
1
= (i[ +j[) [i = 1; g
22
= e
2
[e
2
= (i[ +j[) ([i +[j) = 2
g
31
= e
3
[e
1
= (i[ +j[ +k[) [i = 1; g
32
= e
3
[e
2
= (i[ +j[ +k[) ([i +[j) = 2;
y
g
13
= e
1
[e
3
= i[ ([i +[j +[k) = 1;
g
23
= e
2
[e
3
= (i[ +j[) ([i +[j +[k) = 2
g
33
= e
3
[e
3
= (i[ +j[ +k[) ([i +[j +[k) = 3
consecuentemente
g
ij
g
ji
_
_
1 1 1
1 2 2
1 2 3
_
_
= g
ij
g
ij
= ( g
ij
)
1
_
_
2 1 0
1 2 1
0 1 1
_
_
Hernandez & N u nez Universidad Industrial de Santander 224
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
La otra forma de calcular la metrica correspondiente la base ortonormal [e
1
, [e
2
, [e
3
[i , [j , [k y
transformarla a la base no ortonormal [e
1
, [e
2
, [e
3
[i , [i +[j , [i +[j +[k esto es
g
km
=
x
i
x
k
x
j
x
m
g
ij
= g
km
=
x
i
x
k
g
ij
x
j
x
m
La metrica para el la base ortonormal ser a diagonal y ademas g
ii
=
1
g
ii
, con lo cual
g
ij
_
_
1 0 0
0 1 0
0 0 1
_
_
; g
ij
_
_
1 0 0
0 1 0
0 0 1
_
_
; g
i
j
_
_
1 0 0
0 1 0
0 0 1
_
_
;
y
g
km
=
x
i
x
k
g
ij
x
j
x
m
;
_
_
1 0 0
1 1 0
1 1 1
_
_
_
_
1 0 0
0 1 0
0 0 1
_
_
_
_
1 1 1
0 1 1
0 0 1
_
_
=
_
_
1 1 1
1 2 2
1 2 3
_
_
notese para conservar la convencion de ndices y matrices hemos representado que hemos traspuesto la matriz
correspondiente a
x
i
x
k
. La razon, como dijimos arriba es
g
km
=
x
i
x
k
g
ij
x
j
x
m
g
km
=
ik
g
ij
jm
g
km
=
ki
g
ij
jm
Para poder representar multipicacion de matrices los ndices deben estar consecutivos, por tanto hay que
trasponer la represetacion matricial para poder multiplicarlar.
Ya estamos en capacidad de obtener las representacines matriciales para los tensores:
T
j
i
,
T
ij
,
T
ij
.
_
T
j
i
_
=
_
T
i
j
_
T
_
_
0 2 3
1 2 4
1 3 5
_
_
T
=
_
_
0 1 1
2 2 3
3 4 5
_
_
T
j
i
_
_
T
km
_
=
_
g
kn
T
n
m
_
_
_
1 1 1
1 2 2
1 2 3
_
_
_
_
0 2 3
1 2 4
1 3 5
_
_
=
_
_
2 3 6
4 8 15
5 11 20
_
_
T
km
_
_
T
kn
_
=
_
T
n
m
g
mk
_
_
_
0 2 3
1 2 4
1 3 5
_
_
_
_
1 1 1
1 2 2
1 2 3
_
_
=
_
_
5 10 13
7 13 17
9 17 22
_
_
T
km
_
5.5. Campos Tensoriales y el Concepto de Campo
Cuando avanzamos en la derivacion de vectores vimos vectores que dependan del tiempo. Luego cuando
construimos sistemas de coordenadas ortogonales vimos tambien vectores que variaban en modulo direccion
y sentido.
[a
(t)
= a
k
(t) [e
k
(t)
= a
k
[e
k
(t)
= a
k
(t) [e
k
Hernandez & N u nez Universidad Industrial de Santander 225
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
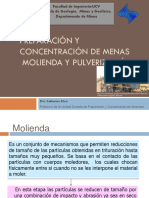
Figura 5.2: Radio vector posicion r (t) en 1
2
que describe parametricamente una curva.
Ahora podemos generalizar este concepto a tensores que dependen de una variable escalar
T [, , , ; , , , ]
(t)
T
_
_
|ti(1)
,
|uj(2)
, , ,
|v
k
(m)
;
x
m
(1)|
,
y
n
(2)|
, ,
z
l
(n)[
_
(t)
= T
mnl
ijk
(t)
T
mnl
ijk
(t)
t
i
(1)
u
j
(2)
v
k
(m)
[x
m
(1) [y
n
(2) [z
l
(n)
T
mnl
ijk
t
i
(1)
(t)
u
j
(2)
(t)
v
k
(m)
(t)
[ x
m
(1)
(t)
[ y
n
(2)
(t)
[ z
l
(n)
(t)
T
mnl
ijk
(t)
t
i
(1)
(t)
u
j
(2)
(t)
v
k
(m)
(t)
[ x
m
(1)
(t)
[ y
n
(2)
(t)
[ z
l
(n)
(t)
al igual que los vectores, la dependencia funcional de los tensores variara con la base en la cual se exprese.
As tendremos tensores cuyas componentes, en una determinada base, seran variables y en otra no. Mientras
que una de las bases sera variable y otra no.
Igualmente saltamos al cociente incremental para conocer la velocidad de variacion
lm
t0
T [, , , ; , , , ]
(t+t)
T [, , , ; , , , ]
(t)
t
lm
t0
T [, , , ; , , , ]
(t)
t
d
_
T [, , , ; , , , ]
(t)
_
dt
Hernandez & N u nez Universidad Industrial de Santander 226
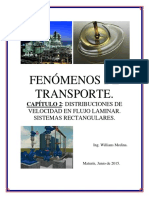
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.3: Campo Vectorial en 1
3
si la base es constante, entonces podemos, como en el caso de los vectores, la dependencia funcional y su
variacion (su derivada) recae sobre sus componentes. As podemos construir la derivada de las componentes
como
lm
t0
T
mnl
ijk
(t + t) T
mnl
ijk
(t)
t
= lm
t0
T
mnl
ijk
(t)
t
=
d
_
T
mnl
ijk
(t)
_
dt
Siguiendo con el proceso de generalizacion podemos pensar en una dependencia funcional multilineal.
Esto es que el argumento de la funcion tensorial otro tensor,
T [, , , ; , , , ] = T [, , , ; , , , ]
G[,, ,;,, ,]
A ese objeto se le llama Campo Tensorial, pero vamos con calma. Analicemos lo casos mas simples los cuales
son los verdaderamente utiles. Como era de esperarse, tendremos varios casos que se pueden construir a
partir de esta idea hemos visto funciones que ahora llamaremos campos homogeneos
= (t) funcion
[r
(t)
r = r (t) r
k
(t) vector
T = T [, , , ; , , , ]
(t)
T
mnl
ijk
(t) tensor
y veremos campos constantes o estacionarios r ,= r (t)
= (r) Campo Escalar
[a
(|r)
a = a (r) a
k
(r) Campo Vectorial
T = T [, , , ; , , , ]
(|r)
T
mnl
ijk
(r) Campo Tensorial
.
.
.
.
.
.
Hernandez & N u nez Universidad Industrial de Santander 227
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
campos variables o no estacionarios
= (r (t) , t) Campo Escalar Variable
[a
(|r)
a = a (r (t) , t) a
k
(r (t) , t) Campo Vectorial
T = T [, , , ; , , , ]
(|r)
T
mnl
ijk
(r (t) , t) Campo Tensorial
.
.
.
.
.
.
en ambos casos hemos supuesto que la base en la cual se expresan vectores y tensores es constante.
La idea de los campos escalares, vectoriales, tensoriales, con argumento vectorial, es asociar un valor de la
componente (escalar, vectorial o tensorial) a cada punto del espacio (si el vector esta en 1
3
). Obviamente los
campos escalares asocian un n umero a cada posicion y los campos vectoriales, ademas del n umero (modulo)
asocian una direccion y un sentido.
Los campos escalares seran las distribuciones de densidad (r (t)) , presion P (r (t)) y temperatura
T (r (t)) de la atmosfera terrestre o la distribucion de intensidades del campo electrico en una supercie.
As al considerar el potencial electrico
(r) = (x, y) = ln
_
_
(x + 1)
2
+ y
2
_
ln
_
_
(x 1)
2
+ y
2
_
La representacion del campo escalar sera
Campo Escalar (r) = (x, y) = ln
_
_
(x + 1)
2
+ y
2
_
ln
_
_
(x 1)
2
+ y
2
_
y la representacion de un campo vectorial sera
Hernandez & N u nez Universidad Industrial de Santander 228
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.4: Ejemplo de Campo Escalar. Campo de Temperaturas T = T (x, y)
Campo vectorial
5.6. Campos escalares y supercies
Campo escalar sera aquella funcion escalar de argumento vectorial. Con ello a cada punto del espacio se
le asocia un n umero. Esto es
: 1
n
1 = (r) =
_
x
i
_
=
_
x
i
_
= (x, y, z) = ( x, y, z)
Estamos enfatizando el hecho que un campo escalar no variara bajo cambios de las coordenadas en su
argumento. Adicionalmente recalcamos que es indistinto hablar de vectores o sus coordenadas = (r)
=
_
x
i
_
. La Figura 5.4 ilustra un campo de temperaturas
T = T (x, y) = 70 + 180e
(x3)2/10(y2)2/10
Si unimos los puntos con iguales temperaturas tendremos curvas isotermas tal y como se observan en la
Figura 5.6
Hernandez & N u nez Universidad Industrial de Santander 229
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.5: Curvas de Nivel para una funcion z = g (x, y) = cte
Curvas Isotermas. T = T (x, y) = cte
Un campo escalar =
_
x
1
, x
2
_
denira supercies si la representamos en 1
3
como x
3
=
_
x
1
, x
2
_
curvas de nivel o isocurvas las cuales corresponden a soluciones =
_
x
i
_
= cte. Tal y como se ilustra en la
gura (5.5) los planos z = k = cte cortan la supercie y denen la curva g (x, y) = z = k.
Capt5AnalisisVectorial
En la proxima seccion describiremos una fauna de operadores vectoriales, su utilidad y signicado fsico.
5.7. Campos vectoriales y lneas de ujo
Consideremos ahora un campo vectorial a (r) y estudiemos su representacion y lo que es mas importante,
su variacion. Tal y como hemos dicho y volvemos a representar en la gura (5.6) los campos vectoriales
asocian un vector (con su modulo direccion y sentido) a cada punto del espacio. Com unmente, nos referimos
a campos vectoriales seg un el caso. As consideraremos campos de fuerza (es decir el vector del campo es una
fuerza), campo de velocidades ( el vector del campo es una velocidad). Del mismo modo a aquellas lneas a las
cuales los vectores son tangentes se les dominan lneas de campo, curvas integrales o simplemente lneas de
ujo o de corriente. A las trayectorias ortogonales a estas lneas, vale decir a aquellas lneas cuyos vectores
tangentes sean ortogonales al campo, se les denominaran lneas equipotenciales. El ejemplo mas emblematico
Hernandez & N u nez Universidad Industrial de Santander 230
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.6: Capt5AnalisisVectorial/Campos vectoriales
lo constituye el gradiente de un campo escalar
(x, y). Las lneas equipotenciales las dene el campo escalar
mismo, (x, y) = z = cte (curva de nivel) y construimos un campo vectorial con su gradiente,
(x, y) .
Como el gradiente es perpendicular a la curva de nivel tendremos que las curvas integrales, ( lneas de ujo o
lneas de corriente) del campo vectorial
(x, y) seran trayectorias ortogonales a las curvas equipotenciales.
5.7.1. Lneas de ujo o curvas integrales
Supongamos el caso bidimensional
3
en coordenadas cartesianas, y consideremos un desplazamiento dife-
rencial dr en la direccion del campo vectorial, es facil convencerse que
dr a (x, y) = a
x
(x, y) + a
y
(x, y)
dx
a
x
(x, y)
=
dy
a
y
(x, y)
con lo cual encontramos las lneas de ujo o curvas integrales y (x) del campo a (x, y)
dy
dx
=
a
y
(x, y)
a
x
(x, y)
y (x) =
_
a
y
(x, y)
a
x
(x, y)
dx
as dado un campo vectorial
a = x + y
dy
dx
=
y
x
_
dy
y
=
_
dx
x
+ C y (x) =
1
x
C
1
o lo que son lo mismo hiperbolas yx = C.
Otra forma, equivalente de verlo es que
dr a (x(t) , y (t) , z (t) , t) dr a (x(t) , y (t) , z (t) , t) = 0
0 =
_
_
_
_
_
_
k
dx dy dz
a
x
(x(t) , y (t) , z (t) , t) a
y
(x(t) , y (t) , z (t) , t) a
z
(x(t) , y (t) , z (t) , t)
_
_
_
_
_
_
3
El caso tridimensional s olo a nade complicaciones tecnicas y no riqueza conceptual
Hernandez & N u nez Universidad Industrial de Santander 231
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
por lo cual
(a
z
(x(t) , y (t) , z (t) , t) dy a
y
(x(t) , y (t) , z (t) , t) dz)+
+(a
x
(x(t) , y (t) , z (t) , t) dz a
z
(x(t) , y (t) , z (t) , t) dx) +
+(a
y
(x(t) , y (t) , z (t) , t) dx a
x
(x(t) , y (t) , z (t) , t) dy)
k = 0
y nalmente
dx
a
x
(x(t) , y (t) , z (t) , t)
=
dy
a
y
(x(t) , y (t) , z (t) , t)
=
dz
a
z
(x(t) , y (t) , z (t) , t)
la integral de estas ecuaciones construira las lneas de ujo o curvas integrales.
5.7.2. Trayectorias ortogonales a las lneas de ujo
Para encontrar las trayectorias ortogonales al campo vectorial o las lneas equipotenciales construimos
un campo vectorial a
(x, y) que sea ortogonal en todo punto a a (x, y)
a
(x, y) a (x, y) = 0 a
x
(x, y) a
x
(x, y) + a
y
(x, y) a
y
(x, y) = 0
a
x
(x, y)
a
y
(x, y)
=
a
y
(x, y)
a
x
(x, y)
a
(x, y) = a
x
(x, y) a
y
(x, y)
y ahora procedemos del mismo modo pero con el campo vectorial a
(x, y, z)
dy
dx
=
a
y
(x, )
a
x
(x, y)
y (x) =
_
a
y
(x, y)
a
x
(x, y)
dx
con lo cual las trayectorias ortogonales al campo
a = x + y a
= y + x
dy
dx
=
x
y
y (x) =
_
C
2
+ x
2
seran curvas.
5.8. Flujo de Campos Vectoriales
Podemos tambien imaginar ujo de campos vectoriales. Para ello, consideramos una supercie innitesi-
mal d
S =
_
_
_d
S
_
_
_ n
s
, con n
s
el vector unitario normal esa supercie S. Entonces, la cantidad
df = a d
S = a n
s
dS f =
__
s
a d
S =
__
s
a n
s
dS =
__
s
a
n
dS
representara el ujo del campo vectorial a traves de la supercie d
S. Hemos denotado a
n
como la componente
de a a lo largo de n
s
. Hay que hacer notar que f =
__
s
a d
S es independiente del sistema de coordenadas
y en cartesianas puede expresar como
df = a n
s
dS = a
1
cos
_
n
s
a
1
_
+ a
2
cos
_
n
s
a
2
_
+ a
3
cos
_
n
s
a
3
_
Hernandez & N u nez Universidad Industrial de Santander 232
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
donde
_
a
1
, a
2
, a
3
_
son las componentes cartesianas del vector a. La idea que esta cantidad representa ujo
puede tenerse si pensamos en un uido incompresible que uye con un campo de velocidades v = v (r) . El
volumen que atraviesa una determinada supercie en un intervalo de tiempo dt. As, dS denira la base de un
tubo de uido y tendra como altura la |v| cos
_
n
s
v
_
dt ya que la altura no tiene por que ser perpendicular
a la base
4
. Por lo tanto la cantidad de uido que atraviesa la supercie por unidad de tiempo viene dada por
df =
_
|v| cos
_
n
s
v
__
dS = (v n
s
dS) =
_
v d
S
_
f =
__
s
v d
S =
__
s
v n
s
dS =
__
s
v
n
dS
5.9. La fauna de los operadores vectoriales
A partir del concepto de campo escalar, presentaremos la fauna de objetos diferenciales en el espacio
tridimensional. Salvo que se diga lo contrario, utilizaremos el sistema de coordenadas cartesianas, vale decir
_
q
1
, q
2
, q
3
_
(x, y, z)
[r = x[i + y [j + z [k =r = x + y + z
k
h
x
=
_
_
_
_
[r
x
_
_
_
_
= 1; h
y
=
_
_
_
_
[r
y
_
_
_
_
= 1; h
z
=
_
_
_
_
[r
z
_
_
_
_
= 1
r =r (x, y, z) =dr =
_
r
x
_
dx +
_
r
y
_
dy +
_
r
z
_
dz = dx[i + dy [j + dz [k
ds
2
= dx
2
+ dy
2
+ dz
2
g
11
= g
xx
= 1; g
22
= g
yy
= 1; g
22
= g
zz
= 1
5.9.1. Derivada direccional, diferencial total y gradiente
Derivada direccional de Campos escalares
Para analizar los cambios en los campos escalares requerimos comparar dos instantes de tiempo para
ello, parametrizamos las componentes del vector tendremos que
z = (r (t)) = g (x(t) , y (t))
d (x(t) , y (t))
d t
=
(x(t) , y (t))
x
d x(t)
d t
+
(x(t) , y (t))
y
d y (t)
d t
=
(x(t) , y (t))
d r (t)
d t
donde hemos representado
(x(t) , y (t)) =
(x, y)
x
+
(x, y)
y
=
x
(x, y) +
y
(x, y) =
i
(x, y) [e
i
=
,i
(x, y) [e
i
y lo llamaremos el gradiente de la funcion. El gradiente de un campo escalar es uno de los objetos mas
utiles, el cual lo hemos utilizado de manera operacional y no nos hemos detenido a reexionar sobre sus
propiedades.
4
Si lo es cos
n v
= 1 porque la velocidad es paralela a la normal
Hernandez & N u nez Universidad Industrial de Santander 233
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Es claro que para una curva de nivel
g (x, y) = z = (r (t)) = k = cte
d (x(t) , y (t))
d t
=
d k
d t
= 0
d (x(t) , y (t))
d t
= 0 =
(x(t) , y (t))
d r (t)
d t
con lo cual dado que
d r(t)
d t
es la tangente a la curva, el gradiente es perpendicular a la curva tal y como
muestra la gura (5.9.1).
La derivada direccional indicara la tasa de cambio del campo escalar en la direccion que apuntemos.
Derivada Direccional
En una generalizacion de la idea que surge de parametizacion de la curva o de la derivada total respecto
al tiempo
d
d t
=
(x(t) , y (t))
d r (t)
d t
As es claro que, dados dos puntos M y M
en el campo se puedes relacionar sera. Deniremos, entonces la
derivada en la direccion de un vector unitario [u
M como
D
|u
=
(x, y) u =
d
d
= lm
M
M
(M
) (M)
_
M
_
Tal y como se puede apreciar en la gura (??) la derivada direccional representa la pendiente de la recta
tangente a la curva que surge como interseccion entre la supercie (x, y) = z = k = cte y el plano vertical
formado por el eje z y el vector unitario u.Si se da el caso que la funcion de penda de manera explcita del
parametro tendremos que
= (x(t) , y (t) , t)
d
d t
=
(x(t) , y (t) , t)
t
+
(x(t) , y (t) , t)
d r (t)
d t
Hernandez & N u nez Universidad Industrial de Santander 234
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Direccion de maxima variacion en una funcion
En este punto, varias conclusiones se pueden derivar del concepto de derivada total. La primera es que
dado que, la norma de la derivada direccional a lo largo de [u es
_
_
D
|u
_
_
=
_
_
_
(x, y) u
_
_
_ =
(x, y)
cos
_
(x, y) , u
_
(donde hemos denotado por
(x, y) u como el angulo que forman los vectores
(x, y) y u), el valor
maximo del la norma de la derivada direccional sera
_
_
D
|u
_
_
max
=
(x, y)
=
_
i
_
x
i
x
i
_
x
1
_
2
+
_
x
2
_
2
+
_
x
3
_
2
es decir, cuando u apunta en la direccion del gradiente, o lo que es lo mismo, direccion de la mayor tasa
de cambio la indica la direccion del gradiente. O dicho de otro modo, en un determinado punto M de las
supercie (x, y) = z el vector
apunta en la direccion de la maxima tasa de cambio, tal y como podemos
apreciar en la gura (5.9.1).
Hernandez & N u nez Universidad Industrial de Santander 235
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Gradiente y Tangente de una funcion
La segunda conclusion es dado que el gradiente es ortogonal a la supercie, los vectores perpendiculares
a el conformaran el planto tangente a la supercie en un determinado punto.
Gradiente y ujo de un campo vectorial
Podemos utilizar la idea de ujo de un campo vectorial y generalizar la denicion de gradiente para que
sea independiente de coordenadas.
= grad = lm
V 0
1
V
__
s
(x, y, z) d
S = lm
V 0
1
V
__
s
(x, y, z) n
s
dS
Esto es, supongamos que construimos un campo vectorial de la forma siguiente
a (x, y, z) = c (x, y, z) con c = cte
con lo cual
f =
__
s
c (x, y, z) d
S =
__
s
c (x, y, z) n
s
dS
Es claro que esta expresion vale para todos los sistemas de coordenadas. En particular, para un sistema de
coordenadas cartesianas construimos un cubo diferencial con aristas que coincidan con los ejes coordenados.
Entonces se tiene que las caras del cubo seran con
d
S
x+
= (dy dz)
dx
; d
S
x
= (dy dz)
d
S
y+
= (dx dz)
dy
; d
S
y
= (dx dz)
dy
S
z+
= (dx dy)
dy
k; d
S
z
= (dx dy)
dy
k
con lo cual el ujo por las seis caras sera
df = c (x, y, z) d
S
x+
+c (x, y, z) d
S
x
+c (x, y, z) d
S
y+
+c (x, y, z) d
S
y
+c (x, y, z) d
S
z+
+c (x, y, z) d
S
z
= c ((x + dx, y, z) dy dz (x, y, z) dy dz + (x, y + dy, z) dx dz (x, y, z) dx dz
+(x, y, z + dz) dx dy (x, y, z) dx dy)
= c (((x + dx, y, z) (x, y, z)) dy dz + ((x, y + dy, z) (x, y, z)) dx dz+
+((x, y, z + dz) (x, y, z)) dx dy)
Hernandez & N u nez Universidad Industrial de Santander 236
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Desarrollando por Taylor hasta primer orden porque estamos considerando un cubo diferencial tendremos
que
(x + dx, y, z) (x, y, z) +
(x, y, z)
x
dx
(x, y + dy, z) (x, y, z) +
(x, y, z)
y
dy
(x, y, z + dz) (x, y, z) +
(x, y, z)
z
dz
con lo cual
df =
(x, y, z)
x
dx dy dz +
(x, y, z)
y
dy dx dz +
(x, y, z)
z
dz dx dy
df =
_
(x, y, z)
x
+
(x, y, z)
y
+
(x, y, z)
z
_
dV df =
_
_
dV
=
df
dV
= lm
V 0
f
2
f
1
V
2
V
1
= lm
V 0
1
V
__
s
(x, y, z) d
S = lm
V 0
1
V
__
s
(x, y, z) n dS
notese que hemos supuesto que V V
2
V y que f
2
=
__
s
(x, y, z) d
S Que quiere decir que tanto V
1
0
y con lo cual el ujo a traves de un punto se anula, f
1
0.
Gradiente y coordenadas curvilneas
La generalizacion de la expresion del gradiente en coordenadas curvilneas es inmediata a partir de
diferencial total de una funcion
_
q
1
, q
2
, q
3
_
. Esto es
_
q
1
, q
2
, q
3
_
=
_
q
j
_
d =
(x, y, z)
q
j
d q
j
=
_
q
1
, q
2
, q
3
_
d r
con
_
q
1
, q
2
, q
3
_
=
_
_
1
_
_
_
|r
q
1
_
_
_
q
1
e
1
[ +
1
_
_
_
|r
q
2
_
_
_
q
2
e
2
[ +
1
_
_
_
|r
q
3
_
_
_
q
3
e
3
[
_
_
y
d r =
_
r
q
1
dq
1
+
r
q
2
dq
2
+
r
q
3
dq
3
_
d r =
__
_
_
_
[r
q
1
_
_
_
_
[e
1
dq
1
+
_
_
_
_
[r
q
2
_
_
_
_
[e
2
dq
2
+
_
_
_
_
[r
q
3
_
_
_
_
[e
3
dq
3
_
ya que
[e
1
=
1
_
_
_
|r
q
1
_
_
_
[r
q
1
; [e
2
=
1
_
_
_
|r
q
2
_
_
_
[r
q
2
; [e
3
=
1
_
_
_
|r
q
3
_
_
_
[r
q
3
;
Hernandez & N u nez Universidad Industrial de Santander 237
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Es decir la forma general del gradiente para un sistema de coordenadas curvilneas es
= grad =
1
h
1
x
1
[e
1
+
1
h
2
x
2
[e
2
+
1
h
3
x
3
[e
3
Donde denotamos h
i
=
_
_
_
|r
q
i
_
_
_ =
g
ii
el factor de escala que acompa na a la base [e
i
5.9.2. Divergencia y ujo en campos vectoriales
Viendo con un poco mas de cuidado la expresion para el gradiente tenemos
() = grad () =
_
[e
1
h
1
x
1
+
[e
2
h
2
x
2
[e
2
+
[e
3
h
3
x
3
_
=
[e
i
(h)
i
x
i
Donde hemos indicado por (h)
i
al factor de escala y no implica suma. La suma esta indicada entre las
componentes
x
i
i
y los elementos de la base [e
i
. Con esta inspiracion podemos construir un operador
vectorial
_
e
1
[
1(h
1
, h
2
, h
3
)
x
1
+
e
2
[
T (h
1
, h
2
, h
3
)
x
2
+
e
3
[
( (h
1
, h
2
, h
3
)
x
3
_
con lo cual, si cuidamos el orden de operacion, podremos realizar un producto escalar entre dos vectores
a
_
e
1
[
1(h
1
, h
2
, h
3
)
x
1
+
e
2
[
T (h
1
, h
2
, h
3
)
x
2
+
e
3
[
( (h
1
, h
2
, h
3
)
x
3
_
_
a
1
[e
1
+ a
2
[e
2
+ a
2
[e
3
a
e
1
[
1(h
1
, h
2
, h
3
)
_
a
1
[e
1
+ a
2
[e
2
+ a
2
[e
3
_
x
1
+
+
e
2
[
T (h
1
, h
2
, h
3
)
_
a
1
[e
1
+ a
2
[e
2
+ a
2
[e
3
_
x
2
+
e
3
[
( (h
1
, h
2
, h
3
)
_
a
1
[e
1
+ a
2
[e
2
+ a
2
[e
3
_
x
3
y hay que tener cuidado con la posible variacion de los vectores base. Consideremos en caso de coordenadas
cartesianas,
_
x
1
, x
2
, x
3
_
(x, y, z) , donde la base [e
i
[i , [j , [k es constante. Entonces tendremos
de forma inmediata
a =
a
i
_
x
j
_
x
i
i
a
i
_
x
j
_
a
x
(x, y, z)
x
+
a
y
(x, y, z)
y
+
a
z
(x, y, z)
z
Divergencia como medida de ujo
El signicado fsico de la divergencia puede comprenderse si consideramos la denicion, independiente
del sistema de coordenada
div [a]
a =
df
dV
= lm
V 0
1
V
__
s
a d
S lm
V 0
1
V
__
s
a n
s
dS = lm
V 0
1
V
__
s
a
n
dS
Es decir el ujo por unidad de volumen. Otra vez, para un sistema de coordenadas cartesianas construimos
un cubo diferencial con aristas que coincidan con los ejes coordenados. Entonces se tiene que las caras del
Hernandez & N u nez Universidad Industrial de Santander 238
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
cubo seran con
d
S
x+
= (dy dz)
dx
; d
S
x
= (dy dz)
d
S
y+
= (dx dz)
dy
; d
S
y
= (dx dz)
d
S
z+
= (dx dy)
dy
k; d
S
z
= (dx dy)
k
el ujo por las seis caras sera
df = a d
S
x+
+a d
S
x
+a d
S
y+
+a d
S
y
+a d
S
z+
+a d
S
z
con lo cual
df = a
x
(x + dx, y, z) dy dz a
x
(x, y, z) dy dz+
+ a
y
(x, y + dy, z) dx dz a
y
(x, y, z) dx dz+
+ a
z
(x, y, z + dz) dx dy a
z
(x, y, z) dx dy
df = (a
x
(x + dx, y, z) a
x
(x, y, z)) dy dz + (a
y
(x, y + dy, z) a
y
(x, y, z)) dx dz+
+ (a
z
(x, y, z + dz) a
z
(x, y, z)) dx dy
desarrollando por Taylor otra vez, tendremos
a
x
(x + dx, y, z) a
x
(x, y, z) +
a
x
(x, y, z)
x
dx
a
y
(x, y + dy, z) a
y
(x, y, z) +
a
y
(x, y, z)
y
dy
a
z
(x, y, z + dz) a
z
(x, y, z) +
a
z
(x, y, z)
z
dz
obtendremos
df =
a
x
(x, y, z)
x
dx dy dz +
a
y
(x, y, z)
y
dy dx dz +
a
z
(x, y, z)
z
dz dx dy
df = a d
S =
_
a
x
(x, y, z)
x
+
a
y
(x, y, z)
y
+
a
z
(x, y, z)
z
_
dV
Consecuentemente
f =
__
S
a d
S =
___
V
_
a
x
(x, y, z)
x
+
a
y
(x, y, z)
y
+
a
z
(x, y, z)
z
_
dV
___
V
_
a
_
dV
La primera conclusion es que podemos convertir una integral de supercie cerrada de un campo vectorial,
en una integral de volumen encerrada por esa misma supercie. Lo hemos demostrado para el caso de
Hernandez & N u nez Universidad Industrial de Santander 239
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
coordenadas cartesianas, pero como el ujo f =
__
S
a d
S es un escalar, esta armacion vale para cualquier
sistema de coordenadas. Esto se conoce como el Teorema de la Divergencia el cual veremos mas adelante
(ver seccion 5.11.1 en la pagina 255). A partir de este teorema tenemos que si la divergencia de un campo
vectorial en positiva lo interpretaremos como ujo hacia afuera (saliente) del volumen V encerrado por la
supercie, S, y si la divergencia del campo es negativa esa tendremos ujo entrante. Como ilustracion puede
ver el ejemplo de la pagina 242.
Divergencia y coordenadas curvilneas
Para encontrar la expresion para la divergencia en coordenadas curvilneas generalizadas partimos de la
denicion invariante de sistema de coordenadas
div [a]
a = lm
V 0
1
V
__
s
a d
S lm
V 0
1
V
__
s
a n
s
dS = lm
V 0
1
V
__
s
a
n
dS
y al igual que procedimos en coordenadas cartesianas, ahora consideraremos un paraleleppedo curvilneo
con tres de sus aristas alineadas con el sistema ortogonal curvilneo. Las caras de este paraleleppedo
curvilneo podran ser representadas como Entonces se tiene que las caras del cubo seran con
d
S
q
1
+
=
_
ds
q
2 ds
q
3
_
dq
1
[e
1
; d
S
q
1
=
_
ds
q
2 ds
q
3
_
[e
1
S
q
2
+
=
_
ds
q
3 ds
q
1
_
dq
2
[e
2
; d
S
q
2
=
_
ds
q
3 ds
q
1
_
[e
2
S
q
3
+
=
_
ds
q
1 ds
q
2
_
dq
3
[e
3
; d
S
q
3
=
_
ds
q
1 ds
q
2
_
[e
3
;
donde denotamos ds
i
el arco de curva a lo largo de la coordenadas curvilneas generalizada q
i
. Los parentesis
()
dq
i indican que esta supercie es evaluada en q
i
+ dq
i
Adicionalmente, es de hacer notar que
(ds
i
) =
_
g
ii
dq
i
= h
i
dq
i
donde los ndices repetidos NO indican suma
Ahora bien, dado que [a a = a
j
[e
j
el ujo por las seis caras sera
df = a d
S
q
1
+
+a d
S
q
1
+a d
S
q
2
+
+a d
S
q
2
+a d
S
q
3
+
+a d
S
q
3
continuando el paralelo, pero con mucho mas cuidado. Para comenzar vemos que ES el ujo del campo
vectorial lo que esta siendo evaluado en dos puntos distintos. A lo largo de q
1
vemos que
a d
S
q
1
=
_
a
1
_
q
1
, q
2
, q
3
_
h
2
h
3
_
dq
2
dq
3
a d
S
q
2
=
_
a
2
_
q
1
, q
2
, q
3
_
h
3
h
1
_
dq
3
dq
1
a d
S
q
3
=
_
a
3
_
q
1
, q
2
, q
3
_
h
1
h
2
_
dq
1
dq
2
Hernandez & N u nez Universidad Industrial de Santander 240
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
con lo cual es el ujo lo que debemos desarrollar por Taylor.
a
1
_
q
1
+ dq
1
, q
2
, q
3
_
h
2
h
3
=
_
a
1
_
q
1
, q
2
, q
3
_
h
2
h
3
+
_
a
1
_
q
1
, q
2
, q
3
_
h
2
h
3
_
q
1
dq
1
_
a
2
_
q
1
, q
2
+ dq
2
, q
3
_
h
3
h
1
=
_
a
2
_
q
1
, q
2
, q
3
_
h
3
h
1
+
_
a
2
_
q
1
, q
2
, q
3
_
h
3
h
1
_
q
2
dq
2
_
a
3
_
q
1
+ dq
1
, q
2
, q
3
_
h
1
h
2
=
_
a
3
_
q
1
, q
2
, q
3
_
h
1
h
2
+
_
a
3
_
q
1
, q
2
, q
3
_
h
1
h
2
_
q
3
dq
3
_
Notese que el caso cartesiano no se hizo explcito este echo por cuanto h
3
= h
2
= h
1
= cte = 1. Entonces el
ujo por las el caso de coordenadas curvilneas sera
df =
_
a
1
_
q
1
, q
2
, q
3
_
h
2
h
3
_
q
1
dq
1
dq
2
dq
3
+
_
a
2
_
q
1
, q
2
, q
3
_
h
3
h
1
_
q
2
dq
2
dq
3
dq
1
+
+
_
a
3
_
q
1
, q
2
, q
3
_
h
1
h
2
_
q
3
dq
3
dq
1
dq
2
si recordamos que
dV = (ds
1
) (ds
2
) (ds
3
) =
_
g
11
dq
1
_
g
22
dq
2
_
g
33
dq
3
= h
1
h
2
h
3
dq
1
dq
2
dq
3
donde denotamos ds
i
el arco de curva a lo largo de la coordenadas curvilneas generalizada q
i
. Tendremos
que
df
dV
=
1
h
1
h
2
h
3
_
_
a
1
_
q
1
, q
2
, q
3
_
h
2
h
3
_
q
1
+
_
a
2
_
q
1
, q
2
, q
3
_
h
3
h
1
_
q
2
+
_
a
3
_
q
1
, q
2
, q
3
_
h
1
h
2
_
q
3
_
con lo cual identicamos la forma generica de la divergencia en coordenadas curvilneas
div [a]
a =
1
h
1
h
2
h
3
_
_
a
1
_
q
1
, q
2
, q
3
_
h
2
h
3
_
q
1
+
_
a
2
_
q
1
, q
2
, q
3
_
h
3
h
1
_
q
2
+
_
a
3
_
q
1
, q
2
, q
3
_
h
1
h
2
_
q
3
_
Un par de ejemplos
La ecuacion de continuidad El primero de los ejemplos que consideraremos es la ecuacion de continuidad.
Consideremos una supercie cerrada S que encierra un volumen V. Esta supercie esta inmersa en un uido,
de densidad (r, t) que uye con un campo de velocidades v (r, t) . Supondremos ademas que el volumen V
que encierra la supercie S no cambia de posicion, con lo cual, la variacion de masa del uido contenido en
este volumen es
t
____
V
(r, t) dV
_
=
___
V
(r, t)
t
dV
Entonces la variacion de la cantidad de uido encerrada por la supercie S sera igual a la cantidad de uido
que escapa (o ingresa) a traves de esa supercie. Esto es
___
V
(r, t)
t
dV =
__
s
(r, t) v (r, t) n
s
dS =
___
V
(v (r, t) (r, t)) dV
Hernandez & N u nez Universidad Industrial de Santander 241
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
con lo cual
___
V
_
(r, t)
t
+
(v (r, t) (r, t))
_
dV = 0
(r, t)
t
+
(v (r, t) (r, t)) = 0
y esta ultima representa la ecuacion de continuidad en dinamica de uidos.
Fuentes y sumideros El segundo ejemplo es un calculo explcito el cual ilustra la interpretacion de la
divergencia como medida de ujo de un campo vectorial. Consideremos un campo vectorial de la forma
a (r) = q
r
r
3
q
r
2
u
r
a =
1
h
r
h
_
( a
r
(r, , ) h
)
r
+
( a
(r, , ) h
h
r
)
+
( a
(r, , ) h
r
h
a =
1
r
2
sen
_
_
q
r
2
r
2
sen
_
r
_
= 0
ya que en coordenadas esfericas, h
r
= 1, h
= r, h
= r sen .
Notese que el origen del sistema coordenado (el punto r = 0) no esta denido porque no lo estaba en
el campo vectorial original a (r) =
q
r
2
u
r
. Con lo cual, se tiene que si la supercie S no encierra a r = 0,
entonces el ujo a traves de esa supercie sera nulo
f =
__
S
a d
S =
___
V
_
a
_
dV = 0
Es decir, todo lo que entra sale. Sin embargo, si el volumen contiene al origen de coordenadas no podemos
decir nada por cuanto hay una indeterminacion en la expresion de la divergencia.
Consideremos con mas cuidado este caso de la aplicacion del Teorema de la Divergencia, en el cual la
supercie S contenga el origen de coordenadas. Es claro que el volumen contenido entre dos esferas de
distintos radio r < r, centradas en el origen y con supercies
S y S respectivamente no contiene al origen y
por lo tanto el ujo sera nulo
f =
___
V
_
a
_
dV = 0 =
__
s
a n
s
dS +
__
s
a n
s
d
S
Pero el campo vectorial sobre la supercie
S de la esfera de radio r es
a =
q
r
2
u
r
, y n
s
u
r
, con lo cual
__
s
a n
s
d
S =
__
s
q
r
2
u
r
( u
r
) d
S =
__
s
q
r
2
ds
ds
es decir,
__
s
a n
s
dS =
__
s
q
r
2
ds
ds
=
__
s
q
r
2
r
2
sen d d = q
_
0
sen d
_
2
0
d = 4q
ya que d
S = h
d h
d rd r sen d. Con lo cual, tenemos que el ujo de un campo singular en un
punto (el origen de coordenadas), a (r) =
q
r
2
u
r
, a traves de una supercie de que encierra ese punto singular,
no es nulo y es igual a 4q. El campo vectorial a (r) , se denominara campo de una partcula fuente si q > 0
y campo de un sumidero si q < 0
Hernandez & N u nez Universidad Industrial de Santander 242
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
5.9.3. Rotores, lneas de torbellino y Circulaci on
Del mismo modo como hemos venido procediendo, haremos otra operacion vectorial con el operador
nabla
Tendremos entonces el rotor o rotacional actuando u operando sobre un campo vectorial
a. En
coordenadas cartesianas podremos expresar esta operacion como
a =
ijk
j
a
k
[e
i
ijk
a
k
x
j
[e
i
= (
2
a
3
3
a
2
) [e
1
+ (
3
a
1
1
a
3
) [e
2
+ (
1
a
2
2
a
1
) [e
3
a = (
y
a
z
z
a
y
) + (
z
a
x
x
a
z
) + (
x
a
y
y
a
x
)
x
y
z
a
x
a
y
a
z
El rotor de un campo vectorial genera otro campo (pseudo)vectorial llamado campo rotor del campo vectorial.
Por razones que seran evidentes enseguida, las curvas integrales de este campo rotor se denominan lneas de
torbellino.
Lneas de torbellino
Consideremos el siguiente campo vectorial en coordenadas cilndricas para z 0
a = z u
= z (sen + cos ) =
z y
_
x
2
+ y
2
+
z x
_
x
2
+ y
2
con lo cual el campo rotor del campo vectorial a sera
b =
a (x, y, z) =
_
z y
_
x
2
+ y
2
+
z x
_
x
2
+ y
2
_
=
x
y
z
z y
x
2
+y
2
z x
x
2
+y
2
0
b =
a (x, y, z) =
x
_
x
2
+ y
2
y
_
x
2
+ y
2
+
z
_
x
2
+ y
2
k
es claro que el campo vectorial y su campo rotor son ortogonales
_
z y
_
x
2
+ y
2
+
z x
_
x
2
+ y
2
_
x
_
x
2
+ y
2
y
_
x
2
+ y
2
+
z
_
x
2
+ y
2
k
_
= 0
Tal y como se detallo en la Seccion 5.7 de la pagina 230 las lneas de ujo se construyen a partir de un
vector diferencial paralelo a campo vectorial en cada punto. Esto es si
b =
a (x, y, z) =
x
y
z
a
x
a
y
a
z
= (
y
a
z
z
a
y
) + (
z
a
x
x
a
z
) + (
x
a
y
y
a
x
)
k
Hernandez & N u nez Universidad Industrial de Santander 243
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.7: Rotores de un campo vectorial, lneas de torbellino
tendremos que
dr
b =
a (x, y, z)
dx
b
x
(x, y, z)
=
dy
b
y
(x, y.z)
=
dz
b
z
(x, y.z)
= d
dx
(
y
a
z
z
a
y
)
=
dy
(
z
a
x
x
a
z
)
=
dz
(
x
a
y
y
a
x
)
= d
donde hemos parametrizado la curva con .
por lo tanto
dx
(
y
a
z
z
a
y
)
=
dy
(
z
a
x
x
a
z
)
=
dz
(
x
a
y
y
a
x
)
= d
_
x
2
+ y
2
dx
x
=
_
x
2
+ y
2
dy
y
=
_
x
2
+ y
2
dz
z
= d
las dos primeras ecuaciones proveen
dy
dx
=
y
x
y (x) = xC
1
_
_
dx
d
=
x
x
2
+y
2
=
C
1
x() =
C
1
dy
d
=
y
x
2
+y
2
=
C
2
y () =
C
2
con
C
1
= cte;
C
1
=
1
_
1 + (C
1
)
2
= cte;
C
2
=
C
1
_
1 + (C
1
)
2
= C
1
C
1
= cte
Hernandez & N u nez Universidad Industrial de Santander 244
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
nalmente
_
x
2
+ y
2
dz
z
= d
dz
d
=
z
_
x
2
+ y
2
=
z
x
_
1 + (C
1
)
2
=
z
C
1
_
1 + (C
1
)
2
=
z
con lo cual
dz
d
=
z
z () =
1
C
3
Lneas de campo ortogonales a supercies
Hemos visto como la condicion dr
b =
a (x, y, z) encuentra lneas (de torbellino) perpendiculares
al campo a (x, y, z) . Uno tambien puede plantearse encontrar el conjunto de supercies para las cuales las
lneas de ujo del campo vectorial, a (x, y, z) , sean perpendiculares. Para ello suponemos que existen estas
supercies y que se representan, matematicamente, como un funcion = (x, y, z) . Por lo tanto
a (x, y, z)
( (x, y, z)a (x, y, z)) =
(x, y, z) a (x, y, z) + (x, y, z)
a (x, y, z) = 0
es decir
es proporcional al campo a (x, y, z) y al aplicar el rotor a ambos miembros se anula. Mas a un,
al proyectar sobre el mismo vector a la ecuacion de la derecha nos queda
a (x, y, z)
_
(x, y, z) a (x, y, z)
_
+a (x, y, z)
_
(x, y, z)
a (x, y, z)
_
= 0
ambos sumandos se anula por denicion de producto vectorial, pero el segundo sumando
a (x, y, z)
_
a (x, y, z)
_
= 0
impone una condicion sobre el campo independiente de la funcion de proporcionalidad.
Por lo tanto, la condicion necesaria y suciente para que las lneas de ujo de un campo vectorial a (x, y, z)
sean perpendiculares a un conjunto de supercies = (x, y, z) es
a (x, y, z)
_
a (x, y, z)
_
= 0
Circulacion de un campo vectorial
La idea (y el nombre de rotor) surge de la idea de rotacion ( circulacion ? ) que este operador descubre
al ser aplicado a un campo vectorial. Como se muestra en la Figura 5.8, la idea intuitiva es colocar un
detector de rotacion inmerso en el campo. En este caso es un par de aspas e imaginamos que el campo
vectorial representa un campo de velocidades de un uido. Si el uido hace girar las aspas en sentido horario
(tirabuzon o sacacorchos derecho hacia arriba) diremos que el campo tiene una circulacion positiva y el rotor
del campo siempre sera positivo en esa region. Si es inversa, diremos que el campo tiene una circulacion
negativa y el rotor tambien lo sera en esa region. Finalmente, si el par de aspas no rota, el campo tendra una
circulacion nula o no tendra circulacion y su rotor sera tambien nulo en esa region.
Para concretar esta intuicion de forma matematica, procedemos de la siguiente forma. Suponga una
circunferencia con radio r = 2, la cual viene descrita parametricamente por el radio vector
r (t) = 2 cos t + 2 sin t d r = 2 (sen + cos ) d
y nos planteamos hacer circular el campo a lo largo de la esa trayectoria. Esto es realizar la siguiente
integral
=
_
a d r =
_
2
0
z (sen + cos ) 2 (sen + cos ) d = 4z
Hernandez & N u nez Universidad Industrial de Santander 245
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.8: Idea sobre el signicado fsico del rotor
El campo vectorial a = z (sen + cos ) esta representado en la Figura 5.7. Hemos utilizado el smbolo
_
para denotar la integral de lnea en un circuito cerrado. Es la primera idea de integrales de campos
vectoriales que veremos con mas detalles en las seccion 5.10.1. Uno hace el producto escalar a d r y luego
integra.
Es interesante comparar este resultado con el ujo del campo de rotores a traves de la supercie que
delimita la circunferencia de radio r = 2. Vale decir
__
_
a
_
n
s
d
S =
__
_
x
_
x
2
+ y
2
y
_
x
2
+ y
2
+
z
_
x
2
+ y
2
k
_
k dx dy
__
_
a
_
n
s
d
S = z
__
dx dy
_
x
2
+ y
2
= z
__
dr rd
r
= z
_
2
0
dr
_
2
0
d = 4z
Esta coincidencia no es tal, corresponde a otro Teorema Integral para campos vectoriales, el Teorema de
Stokes (ver seccion 5.11.2 en la pagina 261) mediante el cual se convierte una integral cerrada de lnea de
un campo vectorial en el ujo del campo de rotores. Este teorema lo estudiaremos con detalle en la seccion
5.11.2
La idea de circulacion se puede generalizar a un campo vectorial generico,
a = a
x
(x, y, z)+a
y
(x, y, z) +a
x
(x, y, z)
k
con lo cual la integral de lnea cerrada, a lo largo de una circunferencia de radio, r, en el plano x, y sera
=
_
a d r =
_
2
0
_
a
x
(x, y, z)+a
y
(x, y, z) +a
x
(x, y, z)
k
_
(r sen + r cos ) d
y suponiendo r 1 podemos desarrollar por Taylor las componentes del campo vectorial en al plano x, y
Hernandez & N u nez Universidad Industrial de Santander 246
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
alrededor del origen de coordenadas r
x,y
0. Esto es
a
x
(x, y, 0) = a
x
[
r=0
+ x
ax
x
r=0
+ y
ax
y
r=0
+ = a
x
[
r=0
+ r cos
ax
x
r=0
+ r sen
ax
y
r=0
+
a
y
(x, y, 0) = a
y
[
r=0
+ x
ay
x
r=0
+ y
ay
y
r=0
+ = a
y
[
r=0
+ r cos
ay
x
r=0
+ r sen
ay
y
r=0
+
Por lo tanto, la integral de lnea nos queda como
=
_
a d r =
_
2
0
_
a
x
[
r=0
+ r cos
a
x
x
r=0
+ r sin
a
x
y
r=0
_
r sin d+
+
_
2
0
_
a
y
[
r=0
+ r cos
a
y
x
r=0
+ r sin
a
y
y
r=0
_
r cos d
con los cual
=
_
a d r = r
2
_
a
y
x
r=0
a
x
y
r=0
_
+ O
_
r
3
_
Finalmente vemos que la componente del rotor en el origen del plano x, y es igual al lmite de la circulacion
a lo largo de una curva cerrada, dividida entre el area de la supercie que encierra la curva cerrada.
a
y
x
r=0
a
x
y
r=0
= lm
r0
r
2
Rotores y velocidades angulares
Considere un cuerpo rgido que gira alrededor de un eje con velocidad angular . Entonces la velocidad
tangencial de un punto P, con una posicion r medida a un origen O situado en ese eje, siempre es
v = r = (
y
z
z
y) + (
z
x
x
z) +
k(
x
y
y
x)
y su rotor sera
v = (
y
v
z
z
v
y
) + (
z
v
x
x
v
z
) + (
x
v
y
y
v
x
)
x
y
z
v
x
v
y
v
z
es decir, por ser un cuerpo rgido la velocidad angular es independiente de r; o lo que es lo mismo, todo
el cuerpo rgido tiene la misma velocidad angular. Con ello tendremos que
v =
ijk
j
v
k
[e
i
=
ijk
klm
l
r
m
[e
i
=
_
i
l
j
m
i
m
j
l
_
j
_
l
r
m
_
[e
i
v =
_
i
l
j
m
i
m
j
l
_
m
j
[e
i
=
_
3
i
i
_
[e
i
= 2
i
[e
i
= 2
sin ndices hubiera sido
_
v
_
x
= (
y
v
z
z
v
y
) =
y
(
x
y
y
x)
z
(
z
x
x
z) = 2
x
_
v
_
y
= (
z
v
x
x
v
z
) =
z
(
y
z
z
y)
x
(
x
y
y
x) = 2
y
_
v
_
z
= (
x
v
y
y
v
x
) =
x
(
z
x
x
z)
y
(
y
z
z
y) = 2
z
Hernandez & N u nez Universidad Industrial de Santander 247
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Otra vez, el rotor de una campo de velocidades de un cuerpo (que rota) detecta su velocidad angular.
Rotores y coordenadas curvilneas
Una vez mas recurrimos a una denicion para el rotor independiente del sistemas de coordenada
a = rot [a] = lm
V 0
1
V
__
d
S a = lm
V 0
1
V
__
n
s
a d
S
y del mismo modo que calculamos el ujo a traves de las distintas capas de un volumen podremos (no lo
haremos y se lo dejaremos al lector) demostrar que
a = rot [a] =
1
h
j
h
k
_
ijk
_
h
k
a
k
_
q
j
[e
i
_
=
1
h
1
h
2
h
3
h
1
[e
1
h
2
[e
2
h
3
[e
3
q
1
q
2
q
3
h
1
a
1
h
2
a
2
h
3
a
3
donde los ndices repetidos i, j, k indican suma;
j y
k no indican suma sino que replican los valores de los
ndices j, k.
Explcitamente
a = rot [a] =
[e
1
h
2
h
3
_
(h
3
a
3
)
q
2
(h
2
a
2
)
q
3
_
+
[e
2
h
1
h
3
_
(h
1
a
1
)
q
3
(h
3
a
3
)
q
1
_
+
+
[e
3
h
1
h
2
_
(h
2
a
2
)
q
1
(h
1
a
1
)
q
2
_
5.9.4. Formulario del Operador nabla,
El operador nabla,
, en las formulas anteriores act ua como un operador lineal. Esto es, dadas (r) , (r) , (r)
funciones escalares de variable vectorial y a y
b dos campos vectoriales cuales quiera, se puede generar el
siguiente formulario, el cual debera ser demostrado por el lector
( + ) =
+
() =
+
_
a +
b
_
=
a +
b +
_
a +
b
_
=
a +
b
_
=
a +
b +
b
y tambien si consideramos las cantidades a
b y a
b tendremos
_
a
b
_
=
_
i
_
a
j
b
j
_
[e
i
=
_
a
_
b +
_
b
_
a
_
a
b
_
=
i
_
ijk
a
j
b
k
_
=
_
ijk
i
a
j
_
b
k
+
_
ijk
i
b
k
_
a
j
=
_
a
_
b a
_
b
_
_
a
b
_
=
_
_
a
b
_
a
_
+a
_
b
_
_
a
b
Hernandez & N u nez Universidad Industrial de Santander 248
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
es claro que
a
_
b
_
,=
_
_
a a
j
_
i
b
i
_
,= b
i
i
a
j
por cuanto en las partes izquierda las derivadas act uan sobre las componentes de
b, mientras que en las
partes derechas es sobre las componentes de a.
Otros casos importantes se presentan cuando los campos escalares y/o vectoriales son a su vez funciones
de un campo escalar. Es decir, funciones compuestas. Esto es
= ((r)) y a = a ((r)) .
En este caso, tendremos
((r)) =
d
d
;
a ((r)) =
d a
d
;
a ((r)) =
_
d a
d
Para demostrar, por ejemplo,
a ((r)) =
d a
d
, utilizamos la estrategia de Taylor y expandimos el
campo vectorial alrededor de un determinado punto, digamos r = r
0
arbitrario. Esto es
a = a (r
0
) +
d a
d
r0
((r) (r
0
)) +
1
2
d
2
a
d
2
M
((r) (r
0
))
2
+
aplicando la divergencia a ambos miembros queda como
a =
[a (r
0
)] +
_
d a
d
r0
((r) (r
0
))
_
+
1
2
_
d
2
a
d
2
M
((r) (r
0
))
2
_
+
con lo cual
a =
d a
d
r0
(r) + ((r) (r
0
))
d
2
a
d
2
r0
(r) +
1
2
((r) (r
0
))
2
d
3
a
d
3
r0
(r) +
esta relacion vale para todo r, en particular para r = r
0
. Con lo cual
r0
=
d a
d
r0
(r
0
) =
a =
d a
d
(r)
ya que r
0
es arbitrario, con lo cual queda demostrado.
Hernandez & N u nez Universidad Industrial de Santander 249
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
5.9.5. Nabla dos veces y el Laplaciano
Formulario de Nabla dos veces
Considerando a Nabla,
, como un operador surge la pregunta de su aplicacion repetida sobre distintos
objetos. Consideremos primero las siguientes expresiones en coordenadas cartesianas. Esto es
2
= =
i
=
ijk
k
[e
i
= 0
a
_
=
i
_
j
a
j
_
[e
i
=
j
i
a
j
[e
i
a
_
=
a
_
= 0
a
_
=
ijk
klm
l
a
m
[e
i
=
_
i
l
j
m
i
m
j
l
_
l
a
m
[e
i
=
i
j
a
j
[e
i
j
j
a
i
[e
i
a
_
=
a
_
a
Laplaciano y campos escalares
Mas alla de la gimnasia de ndices para determinar la expresion de la relacion vectorial, quiza la mas
importante de las aplicaciones es el Laplaciano, el cual en 1
3
y en coordenadas cartesianas puede expresarse
como:
2
= =
i
i
=
xx
+
yy
+
zz
La importancia el Laplaciano reside en que la mayor parte (casi todas) las ecuaciones de la fsica matematica
son ecuaciones diferenciales (ordinarias y parciales) de segundo orden y el Laplaciano las genera en el espacio.
Adicionalmente la solucion a la ecuacion armonica
=
i
i
=
xx
+
yy
+
zz
= 0
es de importancias en varias areas de la fsica.
Se puede demostrar facilmente que el Laplaciano cumple con
( + C) = + C; () = + + 2
considerando las expresiones para el gradiente y la divergencia en coordenadas curvilneas
=
1
h
1
q
1
[e
1
+
1
h
2
q
2
[e
2
+
1
h
3
q
3
[e
3
a =
1
h
1
h
2
h
3
_
_
a
1
_
q
1
, q
2
, q
3
_
h
2
h
3
_
q
1
+
_
a
2
_
q
1
, q
2
, q
3
_
h
3
h
1
_
q
2
+
_
a
3
_
q
1
, q
2
, q
3
_
h
1
h
2
_
q
3
_
respectivamente, es facil llegar a la expresion para el Laplaciano en coordenadas curvilneas
2
=
1
h
1
h
2
h
3
_
q
1
_
h
2
h
3
h
1
q
1
_
+
q
2
_
h
1
h
3
h
2
q
2
_
+
q
3
_
h
2
h
1
h
3
q
3
__
Hernandez & N u nez Universidad Industrial de Santander 250
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Laplaciano y campos vectoriales
Inspirado en la forma que toma un campo vectorial en coordenadas cartesianas, deniremos el Laplaciano
de un campo vectorial como la relacion
a =
a
_
a
_
Desarrollando esta expresion en coordenadas cartesianas tendremos que
a =
_
i
_
j
a
j
_
j
a
j
j
a
i
_
[e
i
= a =
_
j
a
i
_
[e
i
_
a
i
_
[e
i
Es decir, que el Laplaciano de un campo vectorial, expresado en coordenadas cartesianas, es igual al
vector cuyas componentes son los Laplacianos de las componentes del campo original. Es importante resaltar
que la expresion a =
_
a
i
_
[e
i
se cumple unicamente en coordenadas cartesianas pero la denicion que
hemos propuesto, a =
a
_
a
_
, es una ecuacion vectorial y es, por lo tanto, valida en
cualquier sistema de coordenadas.
El Laplaciano de campos vectoriales no lleva construir un formulario de relaciones facilmente demostrables
_
=
() ;
( a) =
_
a
_
;
( a) =
_
a
_
5.9.6. Derivadas Direccionales de Campos Vectoriales
El concepto
Formalmente y como siempre la misma idea de derivada como cociente incremental. Dados dos puntos
P
1
y P
2
y un vector u que los une (va de P
1
P
2
), entonces por denicion
D
|u
[a
d a
du
= lm
P2P1
a (P
2
) a (P
1
)
P
2
P
1
=
_
d a
du
_
i
=
_
d a
i
du
_
= lm
P2P1
a
i
(P
2
) a
i
(P
1
)
P
2
P
1
por consiguiente, si a,tiene por componentes cartesianas (en general cualquier sistema de coordenadas orto-
gonales) (a
x
, a
y
, a
z
) las componentes del vector derivado seran
_
d ax
du
,
d ay
du
,
d az
du
_
. De modo que inspirados
en la derivada direccional de un campo escalar que presentamos en la seccion 5.9.1, podemos construir la
expresion para la derivada direccional de cada una de las componentes del vector
d a
du
. Esto es
d
du
= D
|u
=
u = u
i
i
=
d a
i
du
= u
a
i
= u
j
j
a
i
=D
|u
[a
d a
du
=
_
u
_
a
Otra vez, en coordenadas cartesianas se tiene que
D
|u
a =
_
u
_
a =
_
u
i
i
a
j
_
[e
j
=D
|u
()
d ()
du
=
_
u
_
() u
i
i
()
Un ejemplo: el campo de aceleraciones de un uido
El ejemplo mas estandar es la descripcion del campo de aceleraciones de un uido en movimiento. El
campo de aceleraciones de un uido, como de costumbre, es la variacion del campo de velocidades respecto
al tiempo. Esto es a =
d v
dt
. Para escribir la expresion de este campo de aceleraciones, supongamos que un
uido se mueve y registra un campo de velocidades v = v (r, t) el cual, en general, sera inhomogeneo y no
estacionario. Identicamos una porcion del uido (partcula) cualquiera y observamos que en un intervalo
Hernandez & N u nez Universidad Industrial de Santander 251
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.9: Contribuciones a la variacion de la velocidad en un uido
de tiempo dt esa porcion identicada se mueve de P
1
P
2
y registra un incremento en su velocidad de v
en P
1
a v + dv en P
2
:
v (P
1
) v (r, t) y v (P
2
) v (r + dr, t + dt)
Tal y como ejemplicamos en la Figura 5.9, este incremento proviene de dos contribuciones. Una, llamada
local, debido a el cambio en la variable temporal y otra, por la comparacion del vector velocidad, v, en dos
posiciones (traslacion espacial o contribucion convectiva).
d v
t
=
v
t
dt y d v
u
=
d v
du
du
Visto de otro modo un poco mas informal, dado que el campo es funcion de dos variables y una de ellas
vectorial
v = v (r, t) a =
d v
dt
=
d v
dr
+
v
t
De la discusion anterior es claro que
d v
du
es la derivada direccional del campo de velocidades a lo largo
del vector unitario u que apunta P
1
P
2
Ahora bien, para este caso tenemos que:
du = |d r| , du = |v| dt y u =
v
|v|
con lo cual la derivada direccional nos queda como
d v
du
=
1
|v|
_
v
_
v
nalmente la aceleracion nos queda expresada como
a =
d v
dt
=
1
|v|
_
v
_
v +
v
t
a
i
=
1
|v|
_
v
_
v
i
+
v
i
t
donde hemos representado las componentes cartesianas de los vectores velocidad y aceleracion como v
i
y a
i
,
respectivamente.
Es importante hacer una reexion un poco mas fsica de las contribuciones. La contribucion local proviene
de la variaci on del vector (por la dependencia temporal) alrededor del punto, sin importar la direccion que
sigue al partcula y la contribucion convectiva proviene de la inhomogeneidad del campo de velocidades. Esto
es de la variacion del campo de velocidades seg un la direccion que siga la partcula.
Hernandez & N u nez Universidad Industrial de Santander 252
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
5.10. Integrales y Campos Vectoriales
5.10.1. Resumiendo lo visto
Integrales de Campos
Despues de haber diferenciado campos escalares y vectoriales, el siguiente paso es integrarlos. El primer
caso de este tipo integrales es el trivial que siempre hemos utilizado:
_
V (u) d u =
_
V
x
(u) d u +
_
V
y
(u) d u +
k
_
V
z
(u) d u =
__
V
i
(u) d u
_
[e
i
As integramos la aceleracion de un movimiento parabolico
d v
dt
= a = g
k =v =
_
a dt =
k
_
g dt =
kgt +v
0
=
kgt +v
0x
+v
0y
+
kv
0z
Ahora bien, existen sutilezas en este caso que debemos tener en cuenta. Por ejemplo considere la integral
_
dt
_
a
d
2
a
dt
2
_
=
_
dt
_
d
dt
_
a
d a
dt
_
d a
dt
d a
dt
_
=
_
dt
d
dt
_
a
d a
dt
_
= a
d a
dt
+c
Pero en general los casos quedan resueltos integrando componente a componente con la ayuda de la notacion
de ndices
_
dt
_
a
b
_
=
__
dt
_
ijk
a
j
b
k
_
_
[e
i
Quiza uno de los problemas que ilustra mejor esta situacion es el movimiento bajo fuerzas centrales. La Ley
de Gravitaci on de Newton nos dice que
F = m a = m
d v
dt
= m G
M
r
2
mM
u
r
=
d v
dt
= G
M
r
2
mM
u
r
Es costumbre denir la velocidad aerolar, v
A
, como el area barrida por el radio vector posicion, r (t) que
describe la trayectoria de la partcula
2v
A
= r
d r
dt
= r u
r
d (r u
r
)
dt
= r u
r
_
d r
dt
u
r
+ r
d u
r
dt
_
= r u
r
r
d u
r
dt
= r
2
u
r
d u
r
dt
Notese que si c es un vector constante
d
dt
_
u
r
d u
r
dt
_
= 0 = u
r
d u
r
dt
= c =2v
A
= r
2
u
r
d u
r
dt
= const
con lo cual
d
dt
(v v
A
) =
d v
dt
v
A
= G
M
r
2
mM
u
r
v
A
=
MG
2
_
u
r
_
u
r
d u
r
dt
__
d
dt
(v v
A
) =
MG
2
__
u
r
d u
r
dt
_
u
r
( u
r
u
r
)
d u
r
dt
_
=
MG
2
d u
r
dt
integrando
v v
A
=
MG
2
u
r
+ p
Hernandez & N u nez Universidad Industrial de Santander 253
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.10: Trayectorias de integracion y campos vectoriales
donde p es un vector arbitrario de constante de integracion. Finalmente nos damos cuenta que
r (v v
A
) = r u
r
_
MG
2
u
r
+ p
_
=
MG
2
r + rp cos
r (v v
A
) =
ijk
r
i
v
j
v
Ak
v
A
(r v) = v
A
v
A
= v
2
A
y entonces
v
2
A
=
MG
2
r + rp cos =r =
v
2
A
MG
2
+ p cos
2v
2
A
MG
1 +
2p
MG
cos
que constituye la ecuacion de una conica.
Integrales de lnea
Ahora nos detendremos con mas cuidado en integrales que tambien ya hemos utilizado, pero muy rapi-
damente. As tendremos por delante algunos objetos del siguiente tenor:
_
C
d r,
_
C
V d r y
_
C
V d r
Este tipo de objetos se conoce como integrales de lnea y requieren la especicacion de la curva, C, (la
trayectoria) a lo largo de la cual se lleva la integracion. Es clara la importancia de esa trayectoria para la
integracion de los campos por cuanto encontraran expresiones del campo vectorial que puebla la region a
traves de la cual se integra. Esas trayectorias seran abiertas o cerradas dependiendo de la curva que se siga
en el proceso de integracion.
As para integrar un campo escalar = (r) en coordenadas cartesianas, tendremos que
_
C
(x, y, z) d r =
_
C
(x, y, z)
_
d x +d y +d z
k
_
=
_
C
(x, y (x) , z (x)) d x +
_
C
(x(y) , y, z (y)) d y +
k
_
C
(x(z) , y (z) , z) d z
Hernandez & N u nez Universidad Industrial de Santander 254
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
tal y como indicamos arriba, las tres integrales se podran realizar si conocemos, en cada caso, la expresion
del integrando en termino de la variable de integracion. Esa es la razon por la cual hay que especicar la
curva C que dene la trayectoria de integracion. Esta dene esa funcionalidad.
Integrales de Supercie
Otros objetos que ya nos hemos encontrado son las integrales de supercie y las hemos encontrado cuando
evaluamos el ujo de un campo vectorial y lo relacionamos con la divergencia. As interpretamos que objetos
__
s
a d
S
__
s
a n
s
dS =
__
s
a
n
dS
representaban el ujo de las lneas de campo a traves del diferencial de supercie d
S. Es costumbre que
se separen el modulo, dS, de la direccion y el sentido, n
s
el cual es el vector normal (sentido positivo) a
la supercie. Otra vez, las supercies podran ser abiertas (cuando disponen de una curva que limita sus
fronteras) y cerradas cuando no. Un crculo sera una supercie abierta y una esfera cerrada. Por convencion
supondremos que el vector normal a una supercie cerrada tendra sentido positivo saliendo.
La utilizacion de integrales de supercie nos ha permitido denir, de manera invariante (independiente
del sistema de coordenadas) las expresiones para los operadores diferenciales. As hemos podido denir:
grad = lm
V 0
1
V
__
s
(x, y, z) d
S = lm
V 0
1
V
__
s
(x, y, z) n
s
dS
a div [a] = lm
V 0
1
V
__
s
a d
S lm
V 0
1
V
__
s
a n
s
dS = lm
V 0
1
V
__
s
a
n
dS
a rot [a] = lm
V 0
1
V
__
d
S a = lm
V 0
1
V
__
n
s
a d
S
5.11. Campos Vectoriales y Teoremas integrales
En esta seccion presentaremos un conjunto de teoremas que relacionan las variaciones de un campo
vectorial con las fuentes que lo producen. En terminos tecnicos (matematicos) resultan fundamentales cuando
queremos convertir un tipo de integral (lnea, supercie o volumen) en otra.
El primer teorema, el Teorema de Gauss permite expresar el valor de una integral de volumen, V, en-
cerrado por una determinada supercie, S, (cerrada) en terminos de una integral sobre esa supercie, S.
El otro teorema importante es el Teorema de Stokes, el cual permite relacionar el valor de una integral de
supercie con la integral de lnea sobre la curva que delimita esa supercie.
5.11.1. Teorema de Gauss
Presentacion y demostracion
La primera relacion que presentaremos entre una integral de supercie de un campo vectorial, a,y una
de supercie de su derivada es el Teorema de Gauss el cual se expresa de forma vectorial como
__
s
a d
S
__
s
a n
s
dS =
_
V
a d V
Hernandez & N u nez Universidad Industrial de Santander 255
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.11: Teoremas de Gauss
donde a = a (x, y, z) es el campo vectorial d
S n
s
dS es el diferencial de area y d V el diferencial de
volumen.
Tal y como vimos en su oportunidad el termino
a es interpretado como el ujo del campo a por unidad
de volumen, por lo tanto el lado derecho de la ecuacion es la tasa de ujo neto que sale del volumen sobre
el cual estamos integrando.
La demostracion del Teorema de Gauss es como sigue. supongamos un volumen encerrado por una
supercie convexa, S, como se muestra en la Figura 5.11 en los cuadrantes I, II y III. Supongamos ademas
que orientamos el sistema de coordenada de tal forma que una lnea paralela a uno de los ejes toca la supercie
en dos puntos (Figura 5.11, cuadrante I). De este modo podemos trazar una supercie (perpendicular a esa
lnea) tal que divida la supercie, S, en dos supercies, S
1,
y S
2,
cada una de las cuales esta bordeada por la
curva, C, (Figura 5.11, cuadrante II).
Al evaluar la integral
_
S
a
x
d
S =
_
S1
a
x
d
S +
_
S2
a
x
d
S =
__
s
[a
x
(x
2
, y, z) a
x
(x
1
, y, z)] d S
ya que las componentes x de los vectores normales a las dos supercies que contribuyen (Figura 5.11,
cuadrante III) tienen signos opuestos
d S
2x
= d
S
2
= d
S
1
= d S
1x
= d y d z = d S
Ahora bien, dado que
a
x
x
= lm
x2x1
a
x
(x
2
, y, z) a
x
(x
1
, y, z)
x
2
x
1
a
x
(x
2
, y, z) a
x
(x
1
, y, z) =
_
x2
x1
a
x
x
dx
con lo cual
_
S
a
x
d
S =
__
s
__
x2
x1
a
x
x
dx
_
d y d z =
_
V
a
x
x
dV
Hernandez & N u nez Universidad Industrial de Santander 256
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
y equivalentemente al hacerlo en las direcciones y
k, obtendremos
_
S
a
y
d
S =
_
V
a
y
y
dV y
_
S
a
z
k d
S =
_
V
a
z
z
dV
y nalmente hemos demostrado el Teorema de la divergencia o Teorema de Gauss
__
s
a d
S
__
s
a n
s
dS =
_
V
_
a
x
x
+
a
y
y
+
a
z
z
_
d V =
_
V
_
i
a
i
_
d V =
_
V
a d V
Expresiones equivalentes para el Teorema de Gauss
Si bien la expresion estandar es la que hemos presentado, existen algunas variantes que se derivan de ella.
Por ejemplo si consideramos un campo escalar, (x, y, z) , el teorema de Gauss nos conduce a
__
s
(x, y, z) d
S =
___
V
(x, y, z) d V y
__
s
d
S
B (x, y, z) =
___
V
B (x, y, z) d V
donde
B (x, y, z) es un campo vectorial.
Para comprobar la primera de estas dos relaciones consideramos un vector c constante y construimos un
campo vectorial
a (x, y, z) = c(x, y, z)
__
s
a d
S =
___
V
a d V c
__
s
(x, y, z) d
S = c
___
V
(x, y, z) d V
0 = c
___
s
(x, y, z) d
S
___
V
(x, y, z) d V
_
es decir, para todo vector c siempre se cumple que
__
s
(x, y, z) d
S =
___
V
(x, y, z) d V
Esa misma metodologa se puede aplicar para demostrar la segunda relacion si consideramos un campo
vectorial a (x, y, z) = c
B (x, y, z), con c vector constante y se procede de una manera similar.
Ley de Gauss y Campo Electrico
La aplicacion mas emblematica del Teorema de Gauss lo constituyen el calculo de la divergencia del
campo electrico
E y su relacion con las distribuciones de cargas existentes. Desde siempre sabemos que el
campo electrico producido por una carga Q
i
viene dado por
E
i
(r) =
1
4
0
Q
i
r
2
i
u
ri
;
__
Si
E
i
d
S
i
=
Q
i
E =
(r)
0
En denitiva la deduccion de una de las ecuaciones de Maxwell. Si calculamos el ujo del campo electrico
en una region sin cargas todas las lneas del campo
E (r) atraviesan el volumen: todas entran y todas salen.
Sin embargo si tenemos un conjunto de cargas discretas distribuidas dentro de la region encerrada por la
Hernandez & N u nez Universidad Industrial de Santander 257
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
supercie, S, (ver Figura 5.11, cuadrante IVa) podemos encerrar cada una de las cargas con supercies
esfericas S
i
. Por lo tanto
__
S
E d
S +
i
__
Si
E d
S
i
=
_
V
E d V = 0
__
S
E d
S =
i
__
Si
E d
S
i
Con lo cual hemos denido una supercie con huecos alrededor de cada una de las cargas y llegamos a la
conclusion que lo que entra sale. Por su parte, el campo electrico medido cada supercie esferica interior, S
i
sera
Si
=
1
4
0
Q
i
r
2
i
u
ri
+
E
donde
E
es el campo de todas las otras cargas presentes en e volumen encerrado por S. Es claro que este
campo
E
tiene ujo cero neto sobre cada esfera de supercie S
i
. Por lo tanto
__
S
E d
S =
i
__
Si
_
1
4
0
Q
i
r
2
i
u
ri
+
E
_
n
Si
dS
i
=
i
1
4
0
Q
i
r
2
i
__
Si
dS
i
=
i
Q
i
0
=
Q
0
donde hemos utilizado que
_
Vi
d V
i
= 0 =
i
__
Si
n
Si
dS
i
; u
ri
n
Si
= 1; y
__
Si
dS
i
= S
i
= 4r
2
i
Finalmente encontramos una de las Leyes de Maxwell si reescribimos la integral de supercie utilizando la
Ley de Gauss
__
S
E d
S =
Q
0
=
1
0
_
V
(r) d V
__
S
E d
S =
_
V
E d V =
1
0
_
V
(r) d V
con lo cual
_
V
_
E
(r)
0
_
d V
E =
(r)
0
Discontinuidades y densidades superciales de carga
Normalmente, siempre consideramos que los campos vectoriales a = a (x, y, z) son campos continuos (y,
mas a un, con todas sus derivadas continuas). Sin embargo, encontramos en la naturaleza situaciones en
la cuales el campo vara mucho en una distancia muy corta (innitesimal). En estas situaciones podemos
simular esta rapida variacion como una discontinuidad en el campo. Existe formas de aplicar el Teorema de
Gauss para algunas situaciones en las cuales tratamos con campos discontinuos. La manera apropiada de
tratar (derivadas e integrales de) funciones discontinuas es considerandolas no funciones sino distribuciones.
Este tipo de tratamiento esta fuera del alcance de este formulario y sera considerado en otros cursos.
Supongamos el caso que ilustra la Figura 5.11, cuadrante IVb. Una region 1delimitada por una supercie
S, dentro de la cual, una supercie de discontinuidad,
S, separa dos subregiones 1
1
y 1
2
a traves de la
cual un campo vectorial, a = a (x, y, z) , es discontinuo. Ahora bien, el campo vectorial es continuo en las
subregiones, por lo cual el ujo del campo atraviesa las supercies S
1
y
S que delimitan el volumen V
1
de la
region 1
1
. Entonces el Teorema de Gauss para cada region queda expresado como
_
V1
a d V =
__
S1
a d
S +
__
S
a
+
n
S
d
S y
_
V2
a d V =
__
S2
a d
S
__
S
a
n
S
d
S
Hernandez & N u nez Universidad Industrial de Santander 258
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.12: Discontinuidad del Vector Desplazamiento
donde n
S
es el vector normal a al supercie,
S,de separacion de las dos regiones. Adicionalmente hemos
denotado, a
+
y a
el campo a evaluado del lado de 1
1
y 1
2
, respectivamente. Si ahora consideramos el
teorema de Gauss en toda la region
_
V1+V2
a d V
_
V1
a d V +
_
V2
a d V
Claramente si el campo es continuo dentro de la region 1 entonces nos queda la formulacion estandar del
Teorema de Gauss,
_
V1+V2
a d V =
__
S
a d
S
por el contrario si el campo es discontinuo, entonces debe tomarse en cuenta la discontinuidad del campo y
la relacion que surge de sumar el ujo a traves de las dos regiones es
_
V1+V2
a d V =
__
S
a d
S
__
S
(a
2
a
1
) n
S
d
S
con n
S
el vector unitario, normal a la supercie
S y que apunta de 1
1
1
2
. Es claro que la discontinuidad
que cuenta es la de la componente del campo perpendicular a la supercie (ver Figura 5.12).
Este tipo de discontinuidad en campos irrotacionales es generada por la presencia de fuentes las cuales,
en este caso son densidades superciales de carga. Quiza el ejemplo tpico para la aplicacion de las anteriores
consideraciones es la aplicacion de las ecuaciones de Maxwell en el caso del vector desplazamiento electrico
D,a traves de una supercie,
S, que separa dos medios. Este caso se ilustra en la Figura 5.11, cuadrante
IVc y en la Figura 5.12, solo que en este ultimo caso el vector normal esta denido a la inversa: la region 2
corresponde a la region 1 de la Figura 5.11, cuadrante IVc. La ecuacion de Maxwell correspondiente sera
E =
(r)
D = (r)
_
D
2
D
1
_
n
S
= con
D =
0
E
donde n
S
es el vector normal a la supercie (ver Figura 5.11, cuadrante IVc) y es la densidad supercial de
carga en la supercie, S. Para comprobar esta relacion construimos un volumen cilndrico innitesimal que
encierra la supercie de discontinuidad, de tal forma que S
2
corresponde con la tapa del cilindro y S
1
con su base (Figura 5.11 cuadrante IVc). Adicionalmente, como l 0 no solo podremos trabajar sin las
Hernandez & N u nez Universidad Industrial de Santander 259
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
integrales, el ujo a traves de las paredes del cilindro sera despreciable y S
2
S
1
, sino que ademas, al
encerrar la discontinuidad no tomamos en cuenta la contribucion de la supercie S
3
(o
S, en el cuadrante
IVb de la Figura 5.11). As
D d V =
D
2
S
2
D
1
S
1
(r) (S
2
l) =
_
D
2
D
1
_
n
S2
S
2
con lo cual
(r) l =
_
D
2
D
1
_
n
S2
Teoremas de Green
Cuando consideramos campos vectoriales muy particulares el Teorema de Gauss nos lleva a un par de
identidades vectoriales conocidas como las Identidades o Teoremas de Green
Supongamos que tenemos dos campos escalares: (x, y, z) y (x, y, z) entonces y con ellos construimos
un campo vectorial
a (x, y, z) = (x, y, z)
(x, y, z)
__
s
a d
S =
___
V
a d V
__
s
_
(x, y, z)
(x, y, z)
_
d
S =
___
V
_
(x, y, z)
(x, y, z)
_
d V
con lo cual arribamos a primera identidad de Green, Primer Teorema de Green o, Teorema escalar de Green:
__
s
_
(x, y, z)
(x, y, z)
_
d
S =
___
V
_
(x, y, z)
_
(x, y, z)
_
+
(x, y, z)
(x, y, z)
_
d V
Si ahora, consideramos los siguientes campos vectoriales
_
(x, y, z)
(x, y, z)
_
=
(x, y, z)
(x, y, z) + (x, y, z)
(x, y, z)
y
_
(x, y, z)
(x, y, z)
_
=
(x, y, z)
(x, y, z) + (x, y, z)
(x, y, z)
restando ambas expresiones tendremos que
_
(x, y, z)
(x, y, z) (x, y, z)
(x, y, z)
_
=
(x, y, z)
(x, y, z) (x, y, z)
(x, y, z)
y al integrar sobre un volumen V tendremos la formulacion del Teorema de simetrico de Green, la segunda
identidad (o teorema) de Green o el Teorema
___
V
_
(x, y, z)
(x, y, z) (x, y, z)
(x, y, z)
_
d V =
__
s
_
(x, y, z)
(x, y, z) (x, y, z)
(x, y, z)
_
d
S
La utilidad de estas relaciones las veremos en el desarrollo de la Teora de Potencial en la seccion 5.12.1
en la pagina 264
Hernandez & N u nez Universidad Industrial de Santander 260
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.13: Teorema de Stokes
5.11.2. Teorema de Stokes
Presentacion y demostracion
El teorema de Stokes relaciona una integral de lnea escalar de un campo vectorial, a = a (x, y, z) , a
lo largo de una curva cerrada, C, con una integral del rotor del campo sobre la supercie encerrada por la
curva, C. Es decir
_
a d r =
__
S
_
a
_
d
S
__
S
_
a
_
n
S
dS
Tal y como hemos mencionado antes la supercie la dene su vector normal, y este lo dene el sentido de
circulacion de la curva que bordea la supercie (ver Figura 5.13 cuadrantes I y III).
No haremos una demostracion formal del Teorema de Stokes como lo hicimos para el Gauss. Nos con-
venceremos de que es correcta la relacion a partir de algunas situaciones sencillas. Cualquier supercie la
podremos dividir en peque nas cuadrculas diferenciales, las cuales sumadas constituyen la supercie (ver
Figura 5.13 cuadrante II). Es facil convencerse que la circulacion
5
por le borde de una cuadrcula diferencial
(por ejemplo en el plano x, y) nos lleva a
1234
=
_
1234
a d r =
_
1
a
x
(x, y) d x +
_
2
a
y
(x, y) d y +
_
3
a
x
(x, y) (d x) +
_
4
a
y
(x, y) (d y)
donde hemos denotado la trayectoria a lo largo del permetro de la cuadrcula por 1234 De la Figura 5.14
podemos intuir
1234
=
_
a
x
(x
0
, y
0
) d x +
_
a
y
(x
0
+ d x, y
0
) d y +
_
a
x
(x
0
, y
0
+ d y) (d x) +
_
a
y
(x
0
, y
0
) (d y)
5
Pueden consultar otro ejemplo de circulacion en la seccion 5.9.3
Hernandez & N u nez Universidad Industrial de Santander 261
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Figura 5.14: Circulacion en una cuadrcula del plano x, y
y de all el desarrollo por Taylor que nos conduce a
1234
=
_
a
x
(x
0
, y
0
) d x +
_
_
a
y
(x
0
, y
0
) +
a
y
x
x=x0
d x
_
d y
_
_
a
x
(x
0
, y
0
) +
a
x
y
y=y0
d y
_
d x
+
_
a
y
(x
0
, y
0
) d y
1234
=
_
_
a
y
x
x=x0
a
x
y
y=y0
_
d xd y =
__
S
z
d S
z
__
S
_
a
_
d
S
pero esto vale para todos los puntos (x
0
, y
0
) y se puede aplicar para las otras supercies con lo cual es facil
convercerse que esta tecnica se puede utilizar para cada cuadrcula en las cuales hemos dividido la supercie
(ver Figura 5.13 cuadrante II). Mas a un las circulaciones a lo largo de los permetros de las cuadrculas
interiores se anulan (ver Figura 5.13 cuadrante III) y solo sobrevive la circulacion a lo largo del permetro
exterior de la supercie. Con ello
cuadricula
a d r
a
_
d
S
_
a d r =
__
S
_
a
_
d
S
Expresiones equivalentes para el Teorema de Stokes
Del mismo modo que hicimos en la seccion 5.11.1 con el Teorema de Gauss, podemos hacerlo para el
Teorema de Stokes y tendremos
_
(x, y, z) d r =
__
S
d
S
(x, y, z) y
_
d r
B (x, y, z) =
__
S
_
d
S
B (x, y, z)
donde (x, y, z) es un campo escalar y
B (x, y, z) un campo vectorial. Otra vez, la metodologa para proceder a
la demostracion se fundamenta en considerar un par de campos vectoriales de la forma a (x, y, z) = (x, y, z)c
y
b (x, y, z) = c
B (x, y, z) y desarrollar un algebra vectorial mnima.
Hernandez & N u nez Universidad Industrial de Santander 262
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Teorema de Stokes y Fuerzas Conservativas
El teorema de Stokes nos permite identicas que campos vectoriales irrotacionales generan integrales de
lnea las cuales son independientes de la trayectoria. Esto es
F (x, y, z) = 0
__
S
_
a
_
d
S =
_
a d r = 0
con lo cual, lo que se esta implicando es que toda trayectoria cerrada de puede fraccionar en dos trayectorias
abiertas que se unen en los extremos, entonces
_
a d r = 0 =
_
C1
a d r +
_
C2
a d r
_
P2
P1
curva C1
a d r
_
P2
P1
curva C2
a d r
y lo que nos dice es que vamos de un punto (de corte de la curva cerrada) P
1
a otro punto P
2
por dos
trayectorias distintas y la integral de lnea es la misma. Mas adelante veremos que a los campos vectoriales
irrotacionales les esta asociado un potencial tal que
F (x, y, z) = 0
F (x, y, z)
(x, y, z)
Teorema de Stokes y discontinuidades del campo vectorial
Al igual que el Teorema de Gauss puede ser considerado para manejar funciones discontinuas, el Teorema
de Stokes tambien tiene una expresion cuando se consideran campos discontinuos (continuo a trozos o
continuos por segmentos)
Al igual que en el caso de Teorema de Gauss, consideremos el caso mas simple el de un campo vectorial
a (x, y, z) que es discontinuo sobre una supercie,
S ,que divide 1 en dos subregiones 1
1
y 1
2
(ver otra vez
5.11, cuadrante IVb). En este caso la supercie S, sera abierta y estara delimitada por una curva C
2
. La
interseccion de las supercies S y
S sera una curva
C,la cual dividira a S en dos supercies S
1
y S
2
(ver
Figura 5.13 cuadrante IV). Entonces, aplicando el Teorema de Stokes a la curva cerrada. Entonces
_
C1+
C
a d r =
_
P2
P1
curva C1
a d r +
_
P1
P2
curva
C
a d r =
__
S1
_
a
_
d
S
y
_
C2+
C
a d r =
_
P1
P2
curva C2
a d r +
_
P2
P1
curva
C
a d r =
__
S2
_
a
_
d
S
Ahora bien si las sumamos obtendremos
__
S1
_
a
_
d
S +
__
S2
_
a
_
d
S =
_
C
a d r +
_
P1
P2
curva
C en S1
a d r +
_
P2
P1
curva
C en S2
a d r
la cual puede ser reescrita como
_
C
a d r =
__
S
_
a
_
d
S
_
P2
P1
curva
C
_
a[
S2
a[
S1
_
d r
donde hemos denotado a[
S2
como el campo vectorial evaluado sobre la curva
C del lado de las supercie
S
2
. Es importante se nalar que el termino que incorpora la contribucion de la discontinuidad del campo
solo encierra componentes tangenciales a la supercie. Esto es claro del producto escalar con el vector, d r,
tangente a la curva
C (y tambien a la supercie S).
Hernandez & N u nez Universidad Industrial de Santander 263
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
5.12. Teora de Potencial
5.12.1. Potenciales escalares
Si un campo vectorial
F (x, y, z) en una determinada region 1 puede asociarse con un gradiente de un
potencial tendremos que
F (x, y, z) =
(x, y, z)
F (x, y, z) = 0
_
F (x, y, z) d r = 0
La ventaja que un campo derive de un potencial es, por un la lado la simplicidad y la cantidad de informacion
que sobre el campo teneos: describimos la interaccion por una funcion y no con tres (las componentes del
campo) y sabremos que el campo es irrotacional y conservativo. Pero ademas la funcion que describe el
campo es escalar, con lo cual es independiente del sistema de coordenadas.
Cualquiera de las armaciones implica las otras dos, con o cual podremos elegir cualquier de ellas para
demostrar las otras dos. Veamos:
un campo que derive de un potencial es conservativo e irrotacional
F =
(x, y, z)
_
(x, y, z)
_
= 0
_
(x, y, z) d r =
_
d = (x
0
, y
0
, z
0
) (x
0
, y
0
, z
0
) = 0
donde hemos utilizado la denicion de diferencial total
d =
(x, y, z)
x
dx +
(x, y, z)
y
dy +
(x, y, z)
z
dz =
(x, y, z) d r
un campo conservativo es irrotacional y deriva de un potencial.
Un campo conservativo implica que el trabajo (
_
P2
P1
F (x, y, z) d r) es independiente de la trayectoria
entre P
1
y P
2
. Por eso llamamos a la fuerza conservativa por cuanto se conserva la energa y por lo
tanto, esta depende unicamente de la posicion
_
F (x, y, z) d r = 0
_
P2
P1
F (x, y, z) d r = (x
2
, y
2
, z
2
) (x
1
, y
1
, z
1
)
F (x, y, z) d r = d =
(x, y, z) d r
F (x, y, z) =
(x, y, z)
con lo cual hemos demostrado que el campo vectorial deriva de un potencial. El signo menos () es una
convencion tradicional del ocio de Fsico y proviene de nuestra intuicion de ujo de los acontecimientos:
El agua siempre uye hacia abajo.
Ahora bien, utilizando el Teorema de Stokes tendremos:
F (x, y, z) =
(x, y, z)
_
F d r =
__
S2
_
F
_
d
S = 0
F (x, y, z) = 0
es facil demostrar que el campo tambien es irrotacional.
un campo de fuerzas irrotacional implica que el campo deriva de un potencial y que el campo es
conservativo.
Otra vez, por el Teorema de Stokes si es irrotacional es conservativo,
F (x, y, z) = 0
__
S2
_
F
_
d
S =
_
F d r = 0
Hernandez & N u nez Universidad Industrial de Santander 264
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
y si es conservativo deriva de un potencial
F (x, y, z) d r = d =
(x, y, z) d r
F (x, y, z) =
(x, y, z)
En denitiva, si cualquiera de las condiciones se cumple: conservativo, irrotacional o potencial, las otras
tambien se cumpliran.
5.12.2. Potenciales vectoriales y calibres
Al igual que derivamos un campo vectorial
F a partir de un potencial escalar (x, y, z) y asociamos
su existencia a su condicion de irrotacionalidad,
F (x, y, z) = 0, podemos pensar que un campo sin
divergencia (solenoidal o transverso) conlleva a la existencia de un potencial vectorial. Esto es
F (x, y, z) = 0
F (x, y, z) =
A(x, y, z)
Claramente
F (x, y, z) =
i
F
i
=
i
_
ijk
j
A
k
_
= 0
El campo vectorial
A =
A(x, y, z) se conoce con el nombre de potencial vectorial del campo
F. Ahora bien,
el campo solenoidal,
F, no queda unvocamente determinado a partir de su potencial vectorial. Existe una
arbitrariedad de un campo escalar, llamado de calibre, = (x, y, z) (gauge en ingles) de forma tal que
=
A +
(x, y, z)
F =
A +
_
=
A +
_
=
A
de forma que varios potenciales vectoriales
A
y
A generan el mismo campo vectorial
F. Esta arbitrariedad
nos permite particularizar el calibre seg un nos convenga. Existen varios calibres en el mercado, los cuales
son utilizados seg un el problema fsico al cual tratemos. Entre ellos podemos mencionar un par de ellos:
El calibre de Lorentz:
Esta seleccion proviene de requerir que el campo de calibre satisfaga la ecuacion una ecuacion de onda
2
(x, y, z, t) a
2
(x, y, z, t)
t
2
= 0
donde a es una constante. Notese que hemos supuesto que el campo de calibre puede depender del
tiempo. El calibre del Lorentz se escoje porque (entre otras cosas) permite que la solucion a la ecuacion
de onda para el potencial vectorial
2
A(x, y, z, t) a
2
A(x, y, z, t)
t
2
= 0
quede unvocamente determinada
El calibre de Coulomb, de radiacion o transverso:
La seleccion de este calibre impone que el potencial vectorial
A(x, y, z, t) satisfaga la ecuacion
A = 0
(x, y, z, t) =
A(x, y, z, t) +
(x, y, z, t)
_
= 0
2
(x, y, z, t) = 0
El nombre de calibre de Coulomb, de radiacion o transverso proviene de las consecuencias de su
utilizacion en las ecuaciones de Maxwell.
Notese que si el campo (y el calibre) es independiente del tiempo
A =
A(x, y, z) ambos calibres coinciden.
Hernandez & N u nez Universidad Industrial de Santander 265
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
5.12.3. Teorema de Green y Potenciales
Si el rotor y la divergencia de un campo vectorial,
F, decente (continuo y continuamente diferenciable)
estan especicados en una region del espacio delimitada por una supercie cerrada, S, y las componentes del
campo normales a esa supercie, n
S
F, tambien se conocen, entonces el Teorema de Green nos garantiza
que ese campo,
F, que cumple con esas condiciones es unico.
Esa demostracion procede as. Supongamos que existe otro campo vectorial que cumple con las mismas
condiciones que el campo
F. Esto es
F =
F =
G
n
S
F = n
S
G
_
H =
F
G
_
H = 0
H = 0
n
S
H = 0
como
H es irrotacional entonces
H = 0
H =
(x, y, z)
H =
(x, y, z) = 0
, y el Teorema de Green nos garantiza que
_
d
S =
__
n
S
_
d
S =
___
V
_
_
+
_
d V
con lo cual __
n
S
_
d
S =
__
H n
S
_
d
S =
___
V
_
H
H
_
d V
H = 0
de donde se deduce que
F =
G es decir, que el campo,
F, es unico.
5.12.4. Teorema de Helmholtz
El teorema de Helmholtz arma que todo campo vectorial,
F, continuo, y continuamente diferenciable
(al menos a trozos) y, regular en innito se puede expresar como una suma de dos componentes, una
longitudinal o irrotacional,
F
l
, y otra transversa o solenoidal,
F
t
. Esto es
F =
F
l
+
F
t
con
_
_
_
F
l
= 0
F
t
= 0
En general dado que el campo,
F, puede ser discontinuo, tendremos que suponer que
F = (r)
F =
J (r)
_
_
_
y como
F =
F
l
+
F
t
_
F =
F
l
+
F
t
_
=
F
l
= (r)
F =
F
l
+
F
t
_
=
F
t
=
J (r)
dado que
() y
() son lineales. Esta separacion del campo vectorial
F =
F
l
+
F
t
es completamente
general y siempre puede hacerse para cualquier campo vectorial.
Hernandez & N u nez Universidad Industrial de Santander 266
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Supondremos ademas, que la solucion a la ecuacion de Poisson
2
(x, y, z) = (x, y, z) existe y es
unica
6
.
Tendremos que
F
l
= 0
F
l
=
(x, y, z)
F =
F
l
=
2
(x, y, z) = (r)
y la solucion existe y es unica. Es decir, podemos expresar de manera unvoca al campo vectorial,
F, (a traves
de su componente longitudinal
F
l
) en terminos de un campo escalar (a funcion potencial) (x, y, z) . Por
otra parte
F
t
= 0
F
t
=
F =
F
t
=
A
_
=
A
_
2
A =
J (r)
La cual al seleccionar el calibre de Coulomb
A = 0 se convierte en Es importante se nalar que el campo,
A =
A(x, y, z) , solucion a la ecuacion
A
_
=
2
A =
i
i
A =
J (r)
i
i
A
k
= J
k
(r)
_
2
A
x
= J
x
(r)
2
A
y
= J
y
(r)
2
A
z
= J
z
(r)
Una vez mas nos topamos con la solucion a la ecuacion de Poisson, esta vez para cada componente. Esto se
cumple siempre, porque hemos supuesto que la solucion para la ecuacion de Poisson existe y es unica.
Un corolario del Teorema de Helmholtz que un campo vectorial queda unvocamente determinado si
conocemos su rotor y su divergencia.
6
Esta suposicion es indispensable pero es muy fuerte. Las condiciones sobre el potencial (x, y, z) que la implican seran
consideradas en otros cursos de Metodos Matematicos. En este curso, supondremos que existe y es unica
Hernandez & N u nez Universidad Industrial de Santander 267
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
5.13. Algunos Ejemplos resueltos
1. Hallar las componentes cartesianas del vector que, en coordenadas cilndricas, tiene las siguiente com-
ponentes (1, 1, 3)
Solucion Ese vector en coordenadas cilndricas se puede escribir como:
V = u
r
u
+ 3 u
z
En general, las componentes de los vectores transforman como
a
i
=
x
i
(x
m
)
x
k
a
k
_
a
1
=
x
1
(x
m
)
x
k
a
k
a
2
=
x
2
(x
m
)
x
k
a
k
a
3
=
x
3
(x
m
)
x
k
a
k
_
_
con
_
_
x
1
= x
x
2
= y
x
3
= z
_
_
y
_
_
x
1
= r
x
2
=
x
3
= z
_
_
y la ley de transformacion entre coordenadas cartesianas y coordenadas cilndricas es
x = x(r, ) = r cos ; y = y (r, ) = r sen y z = z
con lo cual es facil identicar
_
_
_
_
_
_
x(r,)
r
= cos
y(r,)
r
= sen
z
r
= 0
_
_
_
_
_
_
;
_
_
_
_
_
_
_
x(r,)
= r sen
y(r,)
= r cos
z
= 0
_
_
_
_
_
_
_
; y
_
_
_
_
_
_
x(r,)
z
= 0
y(r,)
z
= 0
z
z
= 1
_
_
_
_
_
_
con lo cual
a
1
=
x
1
(x
m
)
x
k
a
k
=
x
1
(x
m
)
x
1
a
1
+
x
1
(x
m
)
x
2
a
2
+
x
1
(x
m
)
x
3
a
3
a
1
=
x(r, )
r
(1) +
x(r, )
(1) = cos + r sin = cos (1) + 1 sin (1) = 0,30117
del mismo modo
a
2
=
y (r, )
r
(1) +
y (r, )
(1) = sin r cos = sin (1) (1) cos (1) = 1,3818
a
3
= 3
con lo cual
V = u
r
u
+ 3 u
z
= 0,30117 1,3818 + 3
k
2. Dados T
i
j
, a
i
y b
i
E
3
con
T
i
j
=
_
_
1 0 3
3 4 1
3 1 4
_
_
; a =
_
_
5
2
5
_
_
y
b =
_
_
2
5
4
_
_
Hernandez & N u nez Universidad Industrial de Santander 268
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
a) Suponga que T
i
j
, a y
b estan expresados en coordenadas cartesianas, calcule A
ij
a
i
b
j
, S
ij
a
i
a
j
,
A
ij
b
i
b
j
.
Solucion Donde S
ij
y A
kl
son, respectivamente, las partes simetrica y antisimetrica del tensor T
i
j
y la
metrica en coordenadas cartesianas viene dada por
g
ij
=
_
_
1 0 0
0 1 0
0 0 1
_
_
Tendremos que
S
ij
=
1
2
(T
ij
+ T
ji
) =
1
2
_
_
_
_
1 0 3
3 4 1
3 1 4
_
_
+
_
_
1 3 3
0 4 1
3 1 4
_
_
_
_
=
_
_
2 3 6
3 8 2
6 2 8
_
_
N otese que la expresion matricial para T
ij
g
ik
T
k
j
es la misma que para T
i
j
debido a la forma de
la metrica en este espacio. Del mismo modo
A
ij
=
1
2
(T
ij
T
ji
) =
1
2
_
_
_
_
1 0 3
3 4 1
3 1 4
_
_
_
_
1 3 3
0 4 1
3 1 4
_
_
_
_
=
_
_
0 3 0
3 0 0
0 0 0
_
_
por lo tanto
a
i
A
ij
b
j
=
1
2
_
5 2 5
_
_
_
0 3 0
3 0 0
0 0 0
_
_
_
_
2
5
4
_
_
=
87
2
a
i
S
ij
a
j
=
1
2
_
5 2 5
_
_
_
2 3 6
3 8 2
6 2 8
_
_
_
_
5
2
5
_
_
= 1
b
i
A
ij
b
j
= 0
b) Suponga ahora que esos mismos T
i
j
, a y
b estan expresados en coordenadas cilndricas.
1) Encuentre la expresion para
b en coordenadas esfericas.
Solucion Al expresar
b en cilndricas tendremos que
b = 2 u
+5 u
+4 u
z
con lo cual para expresar
b en esfericas podemos proceder de dos forma.
La primera forma es transformando las componentes al conocer como transforman las coor-
denadas. Es decir conociendo x
i
= x
i
( x
m
) y x
j
= x
j
(x
m
) expresar
b
i
=
x
i
x
k
b
k
. Dado
que
x(, ) = cos = x(r, , ) = r cos sen
_
_
_
= r sen
=
y z = r cos
equivalentemente,
r =
_
2
+ z
2
; = arctan
_
z
_
=
Hernandez & N u nez Universidad Industrial de Santander 269
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
por lo tanto
b
i
=
x
i
x
k
b
k
=
_
_
_
x
1
x
1
x
1
x
2
x
1
x
2
x
2
x
1
x
2
x
2
x
2
x
3
x
3
x
1
x
3
x
2
x
3
x
3
_
_
_
_
_
2
5
4
_
_
=
_
_
_
r
r
r
z
z
z
_
_
_
_
_
2
5
4
_
_
b
i
=
_
_
_
_
2
+z
2
2
+z
2
2
+z
2
z
z
arctan(
z
)
arctan(
z
)
arctan(
z
)
z
_
_
_
_
_
_
2
5
4
_
_
=
_
_
_
2
+z
2
0
z
2
+z
2
0 1 0
z
2
+z
2
0
2
+z
2
_
_
_
_
_
2
5
4
_
_
por lo tanto en esfericas
b =
_
_
2 sen + 4 cos
5
2 cos
r
4 sen
r
_
_
= (2 sen + 4 cos ) u
r
+ 5 u
+
_
2 cos
r
+
4 sen
r
_
u
la otra forma es expresar la base ortonormal cilndrica en terminos de la base ortonormal
esferica. Otra vez, utilizamos la base cartesiana como intermediaria. Esto es:
u
= cos + sen ;
u
= sen + cos
u
z
=
k
_
_
_
_
_
_
= cos u
sen u
= sen u
+ cos u
k = u
z
y parecido en esfericas
u
r
= cos sin + sin sin + cos
k
u
= sin + cos
u
= cos cos + sin cos sin
k
_
_
_
_
_
_
=cos sin u
r
+ cos cos u
sin u
=sin sin u
r
+ sin cos u
+ cos u
k = cos u
r
sin u
con lo cual
u
= cos (cos sin u
r
+ cos cos sin u
) + sen (sin sin u
r
+ sin cos u
+ cos u
) ;
u
= sin u
r
+ cos u
u
= u
u
z
= cos u
r
sin u
entonces
b = 2 u
+ 5 u
+4 u
z
= 2 (sin u
r
+ cos u
) + 5 ( u
) + 4 (cos u
r
sin u
)
nalmente
b = (2 sin + 4 cos ) u
r
+ 5 u
(2 cos + 4 sin ) u
2) Encuentre la expresion para A
ij
a
i
b
j
en coordenadas esfericas
Solucion La expresion para a
i
A
ij
b
j
=
87
2
sera la misma que el caso anterior porque a
i
A
ij
b
j
es un
escalar bajo transformaciones de coordenadas que signica que es invariante y valdra lo mismo
en todos los sistemas de coordenadas
Hernandez & N u nez Universidad Industrial de Santander 270
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Recuerde que
cilndricas
_
_
x = x(, ) = cos
y = y (, ) = sen
z = z
y esfericas
_
_
x = x(r, , ) = r cos sen
y = y (r, , ) = r sen sen
z (r, , ) = r cos
y el tensor metrico en coordenadas cilndricas
g
11
= g
= 1; g
22
= g
=
2
; g
33
= g
zz
= 1.
mientras que en coordenadas esfericas es
g
11
= g
rr
= 1; g
22
= g
= r
2
sin
2
; g
33
= g
= r
2
.
3. Dado el sistema de coordenadas parabolicas
x = cos ; y = sen ; z =
1
2
_
2
_
Exprese el diferencial de volumen dv = dx dy dz en estas coordenadas
Solucion Hay varias maneras de resolver este problema. La mas intuitiva es que, dado que las coordenadas
parabolicas son un sistema de coordenadas ortogonales es multiplicar largo, por ancho, alto con las
longitudes de arco en cada una de las direcciones ortogonales. Esto es
ds
2
= g
nu
dq
n
dq
u
= g
11
_
dq
1
_
2
+ g
22
_
dq
2
_
2
+ g
33
_
dq
3
_
2
_
ds
2
1
= g
11
_
dq
1
_
2
ds
2
2
= g
22
_
dq
2
_
2
ds
2
3
= g
33
_
dq
3
_
2
por consiguiente
dv = (ds
1
) (ds
2
) (ds
3
) =
_
g
11
dq
1
_
g
22
dq
2
_
g
33
dq
3
= h
1
h
2
h
3
dq
1
dq
2
dq
3
con
h
1
=
_
_
_
_
[r
q
1
_
_
_
_
=
_
g
11
=
_
x(q
1
, q
2
, q
3
)
q
1
_
2
+
_
y (q
1
, q
2
, q
3
)
q
1
_
2
+
_
z (q
1
, q
2
, q
3
)
q
1
_
2
h
2
=
_
_
_
_
[r
q
2
_
_
_
_
=
_
g
22
=
_
x(q
1
, q
2
, q
3
)
q
2
_
2
+
_
y (q
1
, q
2
, q
3
)
q
2
_
2
+
_
z (q
1
, q
2
, q
3
)
q
2
_
2
h
3
=
_
_
_
_
[r
q
3
_
_
_
_
=
_
g
11
=
_
x(q
1
, q
2
, q
3
)
q
3
_
2
+
_
y (q
1
, q
2
, q
3
)
q
3
_
2
+
_
z (q
1
, q
2
, q
3
)
q
3
_
2
por lo cual dado que [r = x(, , ) [i + y (, , ) [j + z (, ) [k
h
1
=
_
_
_
_
[r
q
1
_
_
_
_
=
_
g
11
=
_
( cos )
2
+ ( sin )
2
+ ()
2
=
_
(
2
+
2
)
h
2
=
_
_
_
_
[r
q
2
_
_
_
_
=
_
g
22
=
_
( cos )
2
+ ( sin )
2
+ ()
2
=
_
(
2
+
2
)
h
1
=
_
_
_
_
[r
q
1
_
_
_
_
=
_
g
11
=
_
( sin )
2
+ ( cos )
2
+ (0)
2
=
Hernandez & N u nez Universidad Industrial de Santander 271
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
y nalmente
dv = h
1
h
2
h
3
ddd =
_
2
+
2
_
ddd
La otra forma de resolverlo, tambien intuitiva es hacer el producto mixto de los tres vectores ortogonales
base sin normalizar. Esto es
dv =
_
_
_
_
_
dq
1
[r
q
1
_
_
dq
2
[r
q
2
dq
3
[r
q
3
__
_
_
_
= dq
1
dq
2
dq
3
_
_
_
_
[r
q
1
_
[r
q
2
[r
q
3
__
_
_
_
entonces, en general
dv = dq
1
dq
2
dq
3
_
_
_
_
_
det
_
_
_
_
_
x(q
1
,q
2
,q
3
)
q
1
y(q
1
,q
2
,q
3
)
q
1
z(q
1
,q
2
,q
3
)
q
1
x(q
1
,q
2
,q
3
)
q
2
y(q
1
,q
2
,q
3
)
q
2
z(q
1
,q
2
,q
3
)
q
2
x(q
1
,q
2
,q
3
)
q
3
y(q
1
,q
2
,q
3
)
q
3
z(q
1
,q
2
,q
3
)
q
3
_
_
_
_
_
_
_
_
_
_
= dq
1
dq
2
dq
3
det
_
J
_
x
_
q
1
, q
2
, q
3
_
, y
_
q
1
, q
2
, q
3
_
, z
_
q
1
, q
2
, q
3
___
donde J
_
x
_
q
1
, q
2
, q
3
_
, y
_
q
1
, q
2
, q
3
_
, z
_
q
1
, q
2
, q
3
__
es la matriz Jacobiana de la transformacion. Enton-
ces
dv = ddd
_
_
det
_
_
cos sin
cos sin
sin cos 0
_
_
_
_
=
_
2
+
2
_
ddd
En general, el diferencial del volumen viene expresado como un producto mixto de la base ortonormal
[q
1
, [q
2
, [q
3
dv =
_
_
_
dq
1
[q
1
_
dq
2
[q
2
dq
3
[q
3
__
_
= dq
1
dq
2
dq
3
|[q
1
([q
2
[q
3
)|
dv = dq
n
q
n
[
_
123
dq
2
dq
3
[q
1
_
= g
nu
dq
u
g
22
dq
2
g
33
dq
3
q
n
[q
1
. .
n
1
= g
11
dq
1
g
22
dq
2
g
33
dq
3
4. Dado un sistema generico de coordenadas oblicuas
[e
1
= a [i + b [j ; [e
2
= c [i + d [j
a) Encuentre la expresion para la metrica g
ij
en estas coordenadas
Solucion Para una base generica, [x
j
la metrica viene denida por
g
ij
g
ji
= g [[x
i
, [x
j
] x
i
[x
j
x
j
[x
i
g
ij
=
_
x
1
[x
1
x
1
[x
2
x
2
[x
1
x
2
[x
3
_
=
_
a
2
+ b
2
ac + bd
ac + bd c
2
+ d
2
_
b) Encuentre la expresion para un vector generico v = v
x
[i + v
y
[j en estas coordenadas
Solucion
[e
1
= a [i + b [j
[e
2
= c [i + d [j
_
_
_
_
_
_
[i =
1
(d [e
1
b [e
2
)
[j =
1
(c [e
1
a [e
2
)
Hernandez & N u nez Universidad Industrial de Santander 272
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
con = bc ad por lo cual
v = v
x
[i + v
y
[j =
v
x
(d [e
1
b [e
2
) +
v
y
(c [e
1
a [e
2
)
=
_
d
v
x
+ c
v
y
_
[e
1
_
b
v
x
+ a
v
y
_
[e
2
c) Suponga ahora una base y un tensor concreto
[e
1
= [i ; [e
2
=
2
2
[i +
2
2
[j ; T
i
j
=
_
4 2
1 4
_
Encuentre la expresion matricial para el tensor
T
ij
7
Solucion En general,
T
ij
= g
ik
T
k
j
= g
ik
x
k
x
m
T
m
n
x
n
x
j
Identicando
v
x
= v
1
=
x
1
x
j
v
j
=
x
1
x
1
v
1
+
x
1
x
2
v
2
=
_
_
_
_
_
_
d
..
x
1
x
1
v
x
+
c
..
x
1
x
2
v
y
_
_
_
_
_
_
v
y
= v
2
=
x
2
x
j
v
j
=
x
2
x
1
v
1
+
x
2
x
2
v
2
=
_
_
_
_
_
_
b
..
x
2
x
1
v
x
+
a
..
x
2
x
2
v
y
_
_
_
_
_
_
como
a = 1
b = 0
c =
2
2
d =
2
2
_
_
g
ik
=
_
1
2
2
2
2
1
_
_
x
k
x
m
_
=
_
1 1
0 1
_
x
n
x
j
_
=
x
n
x
j
_
1
=
_
1 1
0 1
_
1
=
_
1 1
0 1
_
nalmente
T
ij
=
_
1
2
2
2
2
1
_
_
1 1
0 1
__
4 2
1 4
__
1 1
0 1
_
=
_
5
1
2
2 1 +
3
2
2
5
2
2 1
1
2
2 + 3
_
7
Ayuda dada una mantriz generica A
i
j
=
A B
C D
, su inversa sera
D
ADBC
B
ADBC
C
ADBC
A
ADBC
Hernandez & N u nez Universidad Industrial de Santander 273
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
5. Denimos una transformacion ortogonal (una transformacion de un sistema de coordenadas ortogonales
a otro ortogonal tambien) si se cumple
x
i
=
x
i
x
k
x
k
+ a
i
; x
i
=
x
i
x
k
x
k
+ a
i
; donde det
_
x
k
x
l
_
= det
_
x
k
x
i
_
= 1
con
x
k
x
i
x
i
x
l
=
x
k
x
i
x
i
x
l
=
k
l
a) Muestre que las transformaciones de Galileo en 2 dimensiones
_
x
1
x
2
_
=
_
cos sen
sen cos
__
x
1
x
2
_
+
_
V
1
O
O
t
V
2
O
O
t
_
son transformaciones ortogonales. Note que V
1
O
O
, y V
2
O
O
son las velocidades en la direccion 1 y 2,
respectivamente, del observador
O con coordenadas x
i
respecto al observador O con coordenadas
x
i
,mientras t es el tiempo medido por ambos observadores.
Solucion Una vez mas, identicando
x
i
=
x
i
x
k
x
k
+ a
i
_
x
1
x
2
_
=
_
x
1
x
2
x
1
x
2
x
2
x
1
x
2
x
2
_
_
x
1
x
2
_
+
_
a
1
a
2
_
con lo cual
_
x
1
x
2
= cos
x
1
x
2
= sen
x
2
x
1
= sen
x
2
x
2
= cos
_
;
_
a
1
= V
1
O
O
t
a
2
= V
2
O
O
t
_
con det
_
cos sen
sen cos
_
= cos
2
+
2
sen
2
= 1
6. Las transformaciones de Galileo nos permiten relacionar las posiciones de una partcula respecto a
dos observadores los cuales se encuentran en movimiento, uno respecto al otro. Considere entonces el
movimiento de una partcula visto desde el sistema de coordenadas x
i
tal que
x = V
0x
t; y = V
0y
t g
t
2
2
Exprese el vector velocidad
V de esta partcula visto del sistema de coordenadas x
k
Solucion Tendremos que
x
1
= x = V
0x
t
x
2
= y = V
0y
t g
t
2
2
_
_
_
V
1
= V
x
=
dx
1
dt
= V
0x
V
2
= V
y
=
dx
2
dt
= V
0x
gt
por lo cual
_
V
1
V
2
_
=
_
cos sen
sen cos
__
V
1
V
2
_
+
_
V
1
O
O
t
V
2
O
O
t
_
nalmente
V =
V
1
+
V
2
con
_
_
_
V
1
= V
1
cos V
2
sen + V
1
O
O
t
V
2
= V
1
sen + V
1
cos + V
2
O
O
t
Hernandez & N u nez Universidad Industrial de Santander 274
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
7. Consideremos este par de tensores provenientes de la teora de elasticidad
u
ik
=
1
2
(
k
u
i
+
i
u
k
)
1
2
_
u
i
x
k
+
u
k
x
i
_
;
_
u
i
k
_
0
= u
i
k
1
3
u
m
m
i
k
;
y construyamos el tensor de esfuerzos como
p
i
j
= 2
_
u
i
j
_
0
+ Ku
l
l
i
j
Calcule la energa libre para el medio elastico, denida como F =
1
2
p
i
j
u
j
i
Solucion Tenemos que
p
i
j
= 2
_
u
i
j
_
0
+ Ku
l
l
i
j
= 2
_
u
i
j
1
3
u
m
m
i
j
_
+ Ku
l
l
i
j
= 2u
i
j
+ u
l
l
i
j
_
K
2
3
_
donde u
m
m
=
1
2
(
m
u
m
+
m
u
m
) =
m
u
m
con lo cual
F =
1
2
p
i
j
u
j
i
=
1
2
_
2u
i
j
+ u
l
l
i
j
_
K
2
3
__
u
j
i
=
_
u
i
j
u
j
i
+ u
l
l
i
j
u
j
i
_
1
2
K
3
__
=
_
u
i
1
u
1
i
+ u
i
2
u
2
i
+ u
i
3
u
3
i
_
+
_
1
2
K
3
_
_
u
l
l
_
2
=
__
u
1
1
u
1
1
+ u
2
1
u
1
2
+ u
3
1
u
1
3
_
+
_
u
1
2
u
2
1
+ u
2
2
u
2
2
+ u
3
2
u
2
3
_
+
_
u
1
3
u
3
1
+ u
2
3
u
3
2
+ u
3
3
u
3
3
__
+
_
1
2
K
3
_
_
u
l
l
_
2
=
_
_
u
1
1
_
2
+
_
u
2
2
_
2
+
_
u
3
3
_
2
+ 2
_
u
1
2
u
2
1
+ u
2
3
u
3
2
+ u
3
1
u
1
3
_
_
+
_
1
2
K
3
_
_
u
l
l
_
2
=
_
1
2
K +
2
3
_
_
u
l
l
_
2
+ 2
_
u
1
2
u
2
1
+ u
2
3
u
3
2
+ u
3
1
u
1
3
_
=
_
1
2
K +
2
3
_
(
x
u
x
+
y
u
y
+
z
u
z
)
2
+ 2(
x
u
y
y
u
x
+
y
u
z
z
u
y
+
z
u
x
x
u
z
)
8. Considere ahora la siguiente transformacion de coordenadas
x
= L
+a
; con =
1
_
1 v
k
v
k
; , = 0, 1, 2, 3; i, j, k = 1, 2, 3 y
_
_
L
0
0
=
L
i
0
= L
0
i
= v
i
L
i
j
= L
j
i
=
i
j
+ v
i
v
j
(1)
v
k
v
k
las L
se denomina impulso (
topboost) de Lorentz donde las v
k
son las componentes tridimensionales de la velocidad relativa entre
los observadores
O y O con coordenadas x
y x
, respectivamente. La coordenada x
0
representa el
tiempo medido por el observador O mientras que las x
j
representan las coordenadas espaciales x, y, z
para el mismo observador O con i, j = 1, 2, 3 respectivamente. Notese que 0 v
k
v
k
< 1.
Suponga, por facilidad, que el movimiento es en una dimension , = 0, 1 y i, j = 1.
Hernandez & N u nez Universidad Industrial de Santander 275
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Esto implica
_
=
_
1
1v
2
v
1v
2
v
1v
2
1
1v
2
_
_
x
0
x
1
_
=
_
1
1v
2
v
1v
2
v
1v
2
1
1v
2
_
_
x
0
x
1
_
_
_
=
_
1
1v
2
v
1v
2
v
1v
2
1
1v
2
_
_
x
0
x
1
_
=
_
1
1v
2
v
1v
2
v
1v
2
1
1v
2
_
_
x
0
x
1
_
a) Muestre que los tiempos se alargan cuando son medidos por observadores en movimiento
Solucion Tenemos que t = t
2
t
1
= x
0
2
x
0
1
medido por el observador en reposo y equivalentemente
t =
t
2
t
1
= x
0
2
x
0
1
medido por el observador en movimiento.
t =
t
2
t
1
= x
0
2
x
0
1
=
_
L
0
2
+ a
0
_
_
L
0
1
+ a
0
_
= L
0
2
L
0
1
= L
0
_
x
2
x
1
_
= L
0
0
_
x
0
2
x
0
1
_
+ L
0
1
_
x
1
2
x
1
1
_
=
_
x
0
2
x
0
1
_
1 v
2
=
t
1 v
2
Claramente
lm
v1
t =
N otese que hemos supuesto que el reloj que marca el t y que esta en reposo respecto al sistema
x
se encuentra en la misma posicion espacial x
0
2
= x
0
1
b) Muestre como las distancias se acortan cuando son medidas respecto a observadores en movimiento
Solucion Igualmente la distancia entre dos puntos espaciales sera
l = x
1
2
x
1
1
=
_
L
1
2
+ a
1
_
L
1
1
+ a
1
_
= L
1
_
x
2
x
1
_
=
L
1
0
_
x
0
2
x
0
1
_
+
L
1
1
_
x
1
2
x
1
1
_
Si suponemos ahora que la distancia en el sistema en movimiento x
la medimos en el mismo
tiempo, entonces x
0
2
= x
0
1
con lo cual
l =
L
1
1
_
x
1
2
x
1
1
_
=
_
x
1
2
x
1
1
_
1 v
2
=
1 v
2
l =
_
1 v
2
l lm
v1
_
1 v
2
l = 0
9. La fuerza de Lorentz
F = q
_
E +v
B
_
para una partcula con carga q que se mueve con una velocidad
v en un campo electrco
E, y una inducion magnetica
B. Muestre que
F = q
_
E +v
B
_
E =
A
t
A =
B
_
F = q
_
A
dt
+
A v
_
_
Solucion
F = q
_
E +v
B
_
= q
_
A
t
+v
_
A
_
_
Hernandez & N u nez Universidad Industrial de Santander 276
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
veamos
v
_
A
_
=
jkl
v
k
lmn
m
A
n
e
j
=
jkl
mnl
v
k
m
A
n
e
j
=
_
m
j
n
k
m
k
n
j
_
v
k
m
A
n
e
j
=
_
v
k
j
A
k
v
k
k
A
j
_
e
j
con lo cual
F
j
= q
_
j
A
t
+ v
k
j
A
k
v
k
k
A
j
_
= q
_
j
A
t
v
k
k
A
j
+
j
_
v
k
A
k
_
A
k
_
j
v
k
_
_
F
j
= q
_
j
A
t
v
k
k
A
j
+
j
_
v
k
A
k
_
_
= q
_
A
dt
+
A v
_
_
ya que
dA
j
dt
=
A
j
x
i
dx
i
dt
+
A
j
t
= v
i
i
A
j
+
A
j
t
y
j
v
k
=
v
k
x
j
= 0 ya que v
k
= v
k
(t)
10. Las fuerzas de mareas corresponden a la atraccion de la luna sobre las partculas (el agua) en la
supercie de la tierra. cual es el potencial que corresponde a las fuerzas de marea. Recuerde que la
fuerza gravitacional que produce las mareas
F = G
Mm
r
3
Mm
r
donde r
Mm
es la distancia (ja) entre los centros Luna y Tierra, y r es el radio vector del centro de la
Luna a la partcula que se ve afectada
Solucion Colocando la Tierra en el centro de coordenadas y la Luna en el eje z tendremos:
F = G
Mm
r
3
Mm
r = G
Mm
r
3
Mm
_
x y + 2z
k
_
=
_
G
Mm
r
3
Mm
x =
x
G
Mm
r
3
Mm
y =
y
G
Mm
r
3
Mm
2z =
z
integrando nos queda
= G
Mm
r
3
Mm
x
2
+( (y, z)
y
=
( (y, z)
y
= G
Mm
r
3
Mm
y ( (y, z) = G
Mm
r
3
Mm
y
2
2
+/(z)
= G
Mm
r
3
Mm
x
2
+ G
Mm
r
3
Mm
y
2
2
+/(z)
z
=
/(z)
z
= G
Mm
r
3
Mm
2z /(z) = G
Mm
r
3
Mm
z
2
11. La Ley de Ampere se puede derivar de la ecuacion de Maxwell
H =
J donde
H es el campo
magnetico y
J la densidad de corriente. Si el campo electrico es nulo (
E = 0) muestre que
_
H d r = I
con I la corriente neta que atraviesa la circulacion del campo magnetico.
Hernandez & N u nez Universidad Industrial de Santander 277
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Solucion _
H d r =
__
S
_
H
_
d
S =
__
S
J d
S = I
12. Considere los siguientes campos de fuerzas
a)
F =
_
x
2
+ y
2
+ z
2
_
n
_
x + y + z
k
_
1) Calcule en trabajo
_
F d r a lo largo de un arco de circunferencia unitaria, colocado en
el plano x, y: primero girando en sentido antihorario de 0 y luego en sentido horario
0 .
que puede concluir del campo de fuerzas ?
Solucion Se puede resolver de varas maneras.
a) La forma elegante es expresando el campo de fuerza
F en coordenadas esfericas. Esto es
F =
_
x
2
+ y
2
+ z
2
_
n
_
x + y + z
k
_
r
2n
r r
2n+1
u
r
luego recordamos que d r siempre es tangente a la trayectoria, y en este caso la trayectoria
es una circunferencia unitaria ubicada en el plano x, y, entonces
d r u
F d r = 0 en todo punto
con lo cual esta fuerza es conservativa porque
F d r = 0 (x, y)
_
F d r = 0
b) la otra forma es con la fuerza bruta cartesiana
_
F d r =
_
_
x
2
+ y
2
+ z
2
_
n
_
x + y + z
k
_
_
d x + d y + d z
k
_
como la trayectoria es una circunferencia unitaria ubicada en el plano x, y, entonces y =
1 x
2
, z = 0, con x variando entre 1 y -1 tanto el en caso de circularla en sentido
antihorario de 0 y en sentido horario 0 .
_
F d r =
_
1
1
_
x
2
+ y
2
_
n
x d x +
_
0
0
_
x
2
+ y
2
_
n
y d y
=
_
1
1
_
x
2
+
_
1 x
2
__
n
x d x =
_
1
1
x d x = 0
No es suciente, pero podemos sospechar que la fuerza es conservativa, por cuanto dos circu-
laciones distintas nos dieron el mismo valor de la integral.
2) Ese campo vectorial tendra un potencial (x, y, z) asociado tal que
F =
(x, y, z)?
Justique su respuesta.
Si existe el potencial, encuentrelo y determine el valor del exponente n de tal forma que la
funcion potencial diverge simultaneamente en el origen y en innito.
Hernandez & N u nez Universidad Industrial de Santander 278
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
Solucion Otra vez, planteamos la ecuacion
F =
(x, y, z) en esfericas. Esto es
F = r
2n+1
u
r
=
_
(r, , )
r
u
r
+
1
r
(r, , )
+
1
r sin
(r, , )
_
con lo cual tienen que cumplirse las siguientes ecuaciones
r
2n+1
=
(r, , )
r
; 0 =
(r, , )
; 0 =
(r, , )
Las dos ultimas ecuaciones, validas para r ,= 0, implican que no depende ni de , ni de
. La primera puede ser integrada y nos queda como
r
2n+1
=
d(r)
dr
_
r
2n+1
d r = (r) (r) =
r
2n+2
2n + 2
+ C
resultado que claramente diverge para n = 1, tanto cuando r 0 como cuando r
Obviamente, val a tambien hacerlo en cartesianas
F =
_
x
2
+ y
2
+ z
2
_
n
_
x + y + z
k
_
=
_
(x, y, z)
x
+
(x, y, z)
y
+
(x, y, z)
z
k
_
con lo cual
_
x
2
+ y
2
+ z
2
_
n
x =
(x, y, z)
x
(5.1)
_
x
2
+ y
2
+ z
2
_
n
y =
(x, y, z)
y
(5.2)
_
x
2
+ y
2
+ z
2
_
n
z =
(x, y, z)
z
(5.3)
Integrando la primera de esas ecuaciones
_
x
2
+ y
2
+ z
2
_
n
x =
(x, y, z)
x
(x, y, z) =
_
_
x
2
+ y
2
+ z
2
_
n
x d x =
1
2
_
x
2
+ y
2
+ z
2
_
n+1
n + 1
+( (y, z)
Donde C (y, z) es una funcion que tendremos que ir descubriendo poco a poco. Ahora bien,
sustituyendo esa forma de (x, y, z) en la ecuacion (5.2), tendremos que
_
x
2
+ y
2
+ z
2
_
n
y =
1
2
(x
2
+y
2
+z
2
)
n+1
n+1
+( (y, z)
_
y
=
_
x
2
+ y
2
+ z
2
_
n
y
( (y, z)
y
con lo cual concluimos que C es independiente de y
0 =
(( (y, z))
y
( = ( (z) (x, y, z) =
1
2
_
x
2
+ y
2
+ z
2
_
n+1
n + 1
+( (z)
Hernandez & N u nez Universidad Industrial de Santander 279
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
y ahora sustituyo esta nueva forma de la funcion (x, y, z) en la ecuacion (5.3)
_
x
2
+ y
2
+ z
2
_
n
z =
1
2
(x
2
+y
2
+z
2
)
n+1
n+1
+( (z)
_
z
=
_
x
2
+ y
2
+ z
2
_
n
z
( (z)
z
entonces C tambien es independiente de z. Finalmente se determina que
(x, y, z) =
1
2
_
x
2
+ y
2
+ z
2
_
n+1
n + 1
obviamente es el mismo resultado cuando recordamos que r
2
= x
2
+y
2
+z
2
y tiene el mismo
comportamiento para n = 1.
b)
F =
2Acos
r
3
u
r
+
Asen
r
3
u
con A = const y u
r
, u
vectores unitarios base en coordenadas esfericas
1) Calcule el rotor
F
Solucion El rotor en coordenadas esfericas viene dado por
F =
1
r
2
sin
u
r
r u
r sin u
2Acos
r
3
r
Asen
r
3
0
=
1
r
u
_
Asin
r
2
_
r
_
2Acos
r
3
_
_
= 0
2) Calcule en trabajo
_
F d r a lo largo de una circunferencia unitaria en el plano =
2
que puede concluir del campo de fuerzas ?
Solucion Por el teorema de Stokes el trabajo en un circuito cerrado se anula
_
F d r =
__
F d
S = 0
Se pueda ademas concluir que la fuerza es conservativa.
3) Ese campo vectorial tendr a un potencial asociado tal que
F =
? Justique su respuesta
y de ser posible, encuentre la expresion para ese potencial.
Solucion Una vez mas
2Acos
r
3
u
r
+
Asen
r
3
u
=
_
(r, , )
r
u
r
+
1
r
(r, , )
+
1
r sin
(r, , )
_
con lo cual, tambien una vez mas
2Acos
r
3
=
(r, , )
r
Asen
r
3
=
1
r
(r, , )
0 =
(r, , )
Hernandez & N u nez Universidad Industrial de Santander 280
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
La ultima ecuacion indica que no depende de . Ahora bien integrando la primera de estas
ecuaciones, tendremos
2Acos
r
3
=
(r, , )
r
(r, ) =
_
2Acos
r
3
d r +( () = A
cos
r
2
+( ()
al sustituir la forma del potencial en la tercera ecuacion tendremos
Asin
r
2
=
_
A
cos
r
2
+( ()
_
( ()
= 0
De esta forma
(r, ) = A
cos
r
2
c)
F =
1
r
2
u
r
Encuentre alg un posible campo vectorial
A tal que
A =
F .
Solucion Otra vez
A =
1
r
2
sin
u
r
r u
r sin u
A
r
(r, , ) r A
(r, , ) r sin A
(r, , )
=
1
r
2
u
r
con lo cual
1
r
2
=
1
r
2
sin
_
(r sin A
(r, , ))
(r A
(r, , ))
_
0 =
_
(r sin A
(r, ))
r
A
r
(r, , )
_
0 =
_
(r A
(r, , ))
r
A
r
(r, , )
_
Ahora hay que hacer alg un tipo de suposicion para que podamos encontrar, facilmente alg un
potencial vectorial. Supongamos pues que
A
r
(r, , ) = cte
A
(r, , )
A
(r, , ) = 0
_
_
sin =
(r sin A
(r, , ))
0 =
A
r
(r, , )
0 = A
(r, , ) + r
A
(r, , )
r
A
r
(r, , )
Integrando la primera obtendremos
sin =
(r sin A
(r, , ))
(r, , ) =
cos
r sin
+ C
1
(r, )
de la segunda concluimos que A
r
= A
r
(r, ) es decir, A
r
es independiente de . Finalmente de
la tercera ecuacion concluimos que podemos hacer adicionalmente A
r
= A
r
(r) y C
1
(r, ) = 0.
Resumiendo
F =
1
r
2
u
r
A =
F
A = A
r
(r) u
r
+
cos
r sin
u
Hernandez & N u nez Universidad Industrial de Santander 281
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
d)
F =
_
x
2
+ y
2
+ z
2
k
_
y eval ue las siguientes integrales
1)
_
F d r a lo largo de una circunferencia unitaria
Solucion Por el Teorema de Stokes _
c
F d r =
__
S
_
F
_
d
S
con lo cual
F =
z
x
2
y
2
z
2
= 0
_
c
F d r = 0
2)
_ _
F d
S a lo largo de una esfera unitaria
Solucion Por el Teorema de la divergencia
_ _
F d
S =
___
v
_
F
_
dV
por consiguiente
___
V
_
F
_
dV =
___
V
_
x
+
y
+
k
z
_
_
x
2
+ y
2
+ z
2
k
_
dx dy dz
=
___
V
(2x + 2y + 2z) dx dy dz
si ahora transformamos a coordenadas esfericas tendremos que
x = r sin cos ; y = r sin sin ; z = r cos ; con dV = r
2
sin dr d d
con lo cual
___
V
(2x + 2y + 2z) dx dy dz =
___
V
(2r sin cos + 2r sin sin + 2r cos ) r
2
sin dr d d
___
V
_
F
_
dV =
1
4
13. En coordenadas cilndricas un vector tiene por componentes (0, sin , z).
Calcular:
a) La divergencia en coordenadas esfericas
Solucion Una vez mas
_
x
1
, x
2
, x
3
_
(r, , ) y
_
x
1
, x
2
, x
3
_
(, , z)
a
1
=
x
1
(x
m
)
x
k
a
k
; a
2
=
x
2
(x
m
)
x
k
a
k
; a
3
=
x
3
(x
m
)
x
k
a
k
donde x
1
, con
r =
_
z
2
+
2
; = arctan
_
z
_
=
= r sin = z = r cos
Hernandez & N u nez Universidad Industrial de Santander 282
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
con lo cual
a
1
=
x
1
(x
m
)
x
k
a
k
=
_
z
2
+
2
z
z =
z
2
_
(z
2
+
2
)
=
(r cos )
2
_
(r cos )
2
+ (r sin )
2
= r cos
2
a
2
=
arctan
_
z
_
z
z =:
z
z
2
+
2
=
r
2
sin () cos ()
(r cos )
2
+ (r sin )
2
= sin cos
a
2
= sin
de modo que el campo vectorial, en esfericas
(0, sin , z)
_
r cos
2
, sin cos , sin
_
y la divergencia
A =
1
r
2
sin
_
__
r
2
sin
_
r cos
2
_
r
+
((r sin ) (sin cos ))
+
((r) (sin ))
A =
3r sin cos
2
3 sin cos
2
+ sin + cos
r sin
b) El rotor en coordenadas cartesianas
Solucion Ahora
_
x
1
, x
2
, x
3
_
(x, y, z) y
_
x
1
, x
2
, x
3
_
(, , z) con
x = cos ; y = sin z = z
=
_
x
2
+ y
2
= arctan
_
y
x
_
z = z
de all se sigue si las componentes de en cilndricas
A (0, sin , z)
a
x
=
( cos )
sin =
_
1 + cos
2
_
=
_
x
2
+ y
2
_
1 + cos
2
_
arctan
_
y
x
___
=
_
2x
2
+ y
2
_
_
(x
2
+ y
2
)
a
y
=
sin
sin = cos sin =
_
x
2
+ y
2
cos
_
arctan
_
y
x
__
sin
_
arctan
_
y
x
__
=
xy
_
(x
2
+ y
2
)
a
z
= z
y el rotor
A =
_
a
z
y
a
y
z
_
+
_
a
x
z
a
z
x
_
+
k
_
a
y
x
a
x
y
_
A =
k
_
_
_
_
_
xy
(x
2
+y
2
)
_
x
(2x
2
+y
2
)
(x
2
+y
2
)
_
y
_
_
_
_
=
2y
3
k
_
_
(x
2
+ y
2
)
_
3
Hernandez & N u nez Universidad Industrial de Santander 283
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
14. Muestre la relacion
a
_
_
a =
a
_
a
_
y a partir de ella encuentre las componentes del Laplaciano a en coordenadas cilndricas
Solucion En coordenadas cartesianas tendremos que
_
_
a =
i
_
j
a
j
_
[e
i
ijk
_
j
_
klm
l
a
m
_
[e
i
=
_
i
_
j
a
j
_
i
l
j
m
j
l
i
m
_
j
_
l
a
m
_
_
[e
i
_
a ==
_
i
_
j
a
j
_
j
_
i
a
j
_
+
j
_
j
a
i
_
[e
i
=
_
j
a
i
[e
i
Para encontrar la expresion del Laplaciano de un vector en coordenadas cilndricas tenemos que
a = a
x
+ a
y
+ a
z
k = a
x
(cos [e
r
sin [e
) + a
y
(sin [e
r
+ cos [e
) + a
z
[e
z
a = (a
x
cos + a
y
sin ) [e
r
+ (a
y
cos a
x
sin ) [e
+ a
z
[e
z
ya que
=cos [e
r
sin [e
=sin [e
r
+ cos [e
k =[e
z
x = r cos y = r sen z = z
Notese que
a
x
=
j
j
a
x
=
2
a
x
x
2
+
2
a
x
y
2
+
2
a
x
z
2
a
y
=
j
j
a
y
=
2
a
y
x
2
+
2
a
y
y
2
+
2
a
y
z
2
a
z
=
j
j
a
z
=
2
a
z
x
2
+
2
a
z
y
2
+
2
a
z
z
2
son las componentes cartesianas
15. Muestre que
_
a
b
_
=
_
a
b +
_
_
a +a
_
b
_
+
b
_
a
_
Solucion: El resultado es un gradiente porque
_
a
b
_
es una funcion escalar. El lado izquierdo de la expresion
sera
_
_
a
b
__
i
=
i
_
a
b
_
=
i
_
a
j
b
j
_
=
_
i
a
j
_
b
j
+
_
i
b
j
_
a
j
Hernandez & N u nez Universidad Industrial de Santander 284
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
mientras que el lado derecho
_
_
a
b
__
i
=
_
a
j
j
_
b
i
+
_
b
j
j
_
a
i
+
ijk
a
j
_
b
_
k
+
ijk
b
j
_
a
_
k
=
_
a
j
j
_
b
i
+
_
b
j
j
_
a
i
+
ijk
a
j
kmn
m
b
n
+
ijk
b
j
kmn
m
a
n
=
_
a
j
j
_
b
i
+
_
b
j
j
_
a
i
+
ijk
mnk
a
j
m
b
n
+
ijk
mnk
b
j
m
a
n
=
_
a
j
j
_
b
i
+
_
b
j
j
_
a
i
+
_
i
m
j
n
j
m
i
n
_
a
j
m
b
n
+
+
_
i
m
j
n
j
m
i
n
_
b
j
m
a
n
= a
j
j
b
i
+ b
j
j
a
i
+
i
m
j
n
a
j
m
b
n
j
m
i
n
a
j
m
b
n
+
+
i
m
j
n
b
j
m
a
n
j
m
i
n
b
j
m
a
n
= a
j
j
b
i
+ b
j
j
a
i
+ a
n
i
b
n
a
m
m
b
i
+ b
n
i
a
n
b
m
m
a
i
= a
j
j
b
i
a
m
m
b
i
. .
=0
+ b
j
j
a
i
b
m
m
a
i
. .
=0
+ a
n
i
b
n
+ b
n
i
a
n
= a
n
i
b
n
+ b
n
i
a
n
=
i
_
a
j
b
j
_
=
i
_
a
b
_
16. Dado el siguiente campo vectorial
A = 4xy y
2
+ z
k
a) Encuentre el ujo del campo a traves de un cubo unitario
x = 0, x = 1, y = 0, y = 1, z = 0, z = 1,
Solucion: Tenemos que el ujo del campo Vectorial es
_
S
A d
S =
_
_
A
_
dV =
_
(2y + 1) dV =
_
1
0
dx
_
1
0
dz
_
1
0
(2y + 1) dy = 2
b) Encuentre el ujo del rotor de ese campo a traves de una semi esfera
x
2
+ y
2
+ z
2
= 16 con z 0
Solucion: El ujo del rotor sera
_
S
_
A
_
d
S =
_
A dr =
_
_
4xy y
2
+ z
k
_
(dx + dy ) =
_
4xy dx
_
y
2
dy
como el circuito sera una circunsferencia de radio r = 4 en el plano z = 0 entonces al pasar a
polares nos queda
x = 4 cos() dx = 4 sen() d y = 4 sen() dy = 4 cos() d
con lo cual
_
A dr = 5
_
2
0
4
2
cos sen
2
d = 0
c) Considere ahora un cilindro x
2
+ y
2
= 16 con 1 z 1
1) Encuentre el ujo del campo a traves de esa supercie
Solucion: Como siempre, para encontrar el ujo del campo podemos hacerlo directamente
_
S
A d
S, o
a traves de su divergencia,
_
_
A
_
dV ,
Hernandez & N u nez Universidad Industrial de Santander 285
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
El ujo de este campo a traves de la supercie que encierra el cilindro sera
_
S
A d
S =
_
S+
A d
S +
_
Sc
A d
S +
_
S
A d
S
Con d
las dos tapas del cilindro (z = 1 y x = 1), mientras que d
S
c
representa la
supercie del cilindro. Una forma de resolverlo sera, se transforma el campo a cilndricas, ya
que d
S = dS
c
u
r
+ dS
u
z
Esto es:
A = 4(4 cos )(4 sen )(cos u
r
sen u
) + (4 sen )
2
(sen u
r
+ cos u
) + z
k
y acomodando
A = 16sen (cos 2 u
r
sen 2 u
) + z
k
Entonces, el ujo en las tapas es
_
S+
A d
S =
_
S
A d
S = 16
mientras que en las supercie cilndrica sera:
_
Sc
A d
S =
_
S
d
4d dz (16sen cos 2) = 64
_
1
1
dz
_
2
0
d (sen cos 2) = 0
Finalmente
_
S
A d
S = 32
Hubiera sido inmediato si hubieramos utilizado el teorema de la divergencia y reutilizado los
resultados del volumen anterior. As
_
_
A
_
dV =
_
(2y + 1) dV =
_
(2 ( sen ) + 1) d d dz
con y = sen y el diferencial de volumen dV = d d dz.
Entonces, nalmente,
_
_
A
_
dV =
_
1
1
dz
_
4
0
d 2
2
_
2
0
d sen +
_
1
1
dz
_
4
0
d 2
2
_
2
0
d
para que, otra vez,
_
S
A d
S = 32, porque el primer termino de la suma se anula
2) Encuentre el ujo del rotor de ese campo para el caso z 0
Solucion: El ujo del rotor sera exactamente el mismo que en caso de las semiesfera. Esto es
_
S
_
A
_
d
S =
_
A dr = 0
d) Encuentre alguna de las componentes longitudinales y transversales del campo
Solucion: Todo campo vectorial,
A, se puede separar en una componente longitudinal,
A
l
, y otra transversal,
A
t
. Esto es:
A =
A
l
+
A
t
con
_
_
_
A
l
= 0
A
t
= 0
_
_
_
_
_
_
A
l
= 0
A
l
=
A = 2y + 1
Hernandez & N u nez Universidad Industrial de Santander 286
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
con lo cual tenemos
_
y
A
l
z
z
A
l
y
_
= 0
_
z
A
l
x
x
A
l
z
_
= 0
_
x
A
l
y
y
A
l
x
_
= 0
y
x
A
l
x
+
y
A
l
y
+
z
A
l
z
= 2y + 1
Para empezar a acotar la solucion, supongamos que A
l
z
= A
l
z
(x, y, z) = 0
z
A
l
y
= 0 y
z
A
l
x
= 0 A
l
x
= A
l
x
(x, y) y A
l
y
= A
l
y
(x, y)
_
x
A
l
y
y
A
l
x
_
= 0 y
x
A
l
x
+
y
A
l
y
= 2y + 1
Otro par de suposiciones salvadoras son:
A
l
x
= A
l
x
(x, y) = f(x) y A
l
y
= A
l
y
(x, y) = g(x). Estas nos garantizan que se cumple la ecuacion
_
x
A
l
y
y
A
l
x
_
= 0. Es claro entonces que podemos encontrar una solucion de la forma A
l
x
=
f(x) = x y A
l
y
= g(y) = y
2
, que satisfaga
x
A
l
x
+
y
A
l
y
= 2y + 1. Con lo cual
A
l
= x + y
2
A
t
=
A
A
l
= x(4y 1) 2y
2
+ z
k
Claramente, las suposiciones
A
l
z
= A
l
z
(x, y, z) = 0, A
l
x
= A
l
x
(x, y) = f(x) y A
l
y
= A
l
y
(x, y) = g(x)
son arbitrarias y otras suposiciones pueden ser hechas y, tendremos resultados distintos
e) Encuentre los potenciales escalar y vectorial asociados con este campo vectorial
A, a traves de las
componentes longitudinal,
A
l
, y transversal,
A
t
Solucion: El potencial escalar, = (x, y, z), esta asociado a la componente longitudinal,
A
l
, del campo.
Esto es
A
l
= 0
A
l
=
_
_
_
x =
x
(x, y, z) (x, y, z) =
x
2
+ (y, z)
y
2
=
y
(x, y, z) y
2
=
y
(y, z)
Con lo cual
(x, y, z) =
x
2
+
y
3
3
+ (z)
El potencial vectorial para un campo vectorial,
=
(x, y, z), esta asociado a la componente
transversa,
A
t
, del campo. Esto es
A
t
= 0
A
t
=
_
_
_
x(4y 1) =
y
y
2y
2
=
z
z
z =
x
x
Una vez mas, y de forma arbitraria, suponemos
z
= 0. Entoces las ecuaciones anteriores se
convierten en
x(4y 1) =
z
y
; 2y
2
=
z
x
; y z =
x
x
con lo cual
x(4y 1) =
z
y
y
= x(4y 1)z + f(x, y)
Hernandez & N u nez Universidad Industrial de Santander 287
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
2y
2
=
z
x
x
= 2y
2
z + g(x, y)
y con estos resultados debemos satisfacer
z =
x
x
z = (4y 1)z +
x
f(x, y) + 4yz
y
g(x, y)
con lo cual es inmediato que una posible solucion surge de f(x, y) = g(x, y) = 0, para que
nalmente el potencial vectorial lo podamos expresar como
= x(4y 1)z 2y
2
z
17. Muestre que
Si un campo de velocidades es potencial, el campo de aceleraciones tambien lo sera. Esto es
Si v(r(t), t) =
entonces a(r(t), t) =
con
a(r(t), t) =
d v(r(t), t)
d t
=
v(r(t), t)
t
+
_
v(r(t), t)
_
v(r(t), t)
Quiza le pueda ser util el resultado del primer problema de este examen
Solucion: Adaptando la relacion vectorial del primer problema obtenemos
(v v) =
_
v
_
v +
_
v
_
v +v
_
v
_
+v
_
v
_
_
v
2
_
= 2
_
v
_
v
con lo cual
a =
t
+
1
2
_
_
_
2
_
=
t
+
1
2
_
_
2
_
a =
Encuentre la forma del potencial del campo de aceleraciones en terminos del campo de velocidades
y su potencial
Solucion: Arriba notamos claramente que
=
_
t
+
1
2
v
2
_
t
+
1
2
_
_
2
_
Hernandez & N u nez Universidad Industrial de Santander 288
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
5.14. Algunos problemas propuestos
1. Muestre que
a) Considerando
=
()
x
+
()
y
+ k
()
z
1)
(x, y, z)
(x, y, z)
_
= 0
2)
_
(x, y, z)
(x, y, z)
_
= 0
b) Si
x = r sen cos y = r sen sen x = r cos
y
=
()
x
+
()
y
+ k
()
z
Encuentre, en este nuevo sistema de coordenadas (r, , ) , las expresiones para
f; =
f
y
v
2. En coordenadas cilndricas un vector tiene por componentes (0, sen , z).
Calcular
a) La divergencia en coordenadas esfericas
b) El rotor en coordenadas cartesianas
3. Muestre que se cumple la siguiente la relacion
a
_
_
a =
a
_
a
_
y a partir de ella encuentre las componentes del laplaciano a en coordenadas cilndricas
4. Encuentre el vector normal a la supercie
z =
_
x
2
+ y
2
+
3
_
x
2
+ y
2
en un punto cualquiera (x, y, z) ,= (0, 0, 0) , luego encuentre la expresion para el angulo que forma este
vector con el eje. Encuentre el lmite al cual tiende este angulo cuando (x, y, z) (0, 0, 0).
5. La ecuacion de equilibrio hidrostatico para una esferica es
P (r) + (r)
(r) = 0
donde P (r) es la presion, (r) la densidad y (r) el potencial gravitacional. Muestre que las normales
a las supercies isobaras y las normales a las supercies equipotenciales, son paralelas.
6. Dado r = x + y + z
k con |r| = r = cte, f (r) un campo escalar bien comportado y a y c vectores
constantes, muestre que
a)
r = u
r
r
r
;
(a rf (r)) = af (r) + (a r) f
(r) u
r
b)
(rf (r)) = 3f (r) + rf
(r) ;
((a r) r) = 4 (a r)
((a r)c) =
((c r)a) = (a c) ;
((r a) c) = 2 (a c)
Hernandez & N u nez Universidad Industrial de Santander 289
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
c) Encuentre los enteros n tales que
(r
n
r) = 0
d)
r =
(f (r) r) = 0;
(c r) = 2c;
(c (a r)) = a c
((c r)a) = a c
e)
_
r
_
r
_
f (r) = r
2
f (r) r
2
2
f(r)
r
2
2r
f(r)
r
con f (r)
_
_
f (r)
7. Encuentre la expresion para la divergencia y el rotor de la velocidad v y la aceleracion a de un cuerpo
rgido alrededor de un punto (x, y, z)
v = r a = r + ( r)
donde es la velocidad angular y es un vector constante.
8. Pruebe que el campo de velocidades v (r) de un disco que rota alrededor de su centro con una velocidad
angular cumple con la relacion
v = 2
9. Encuentre la circulacion alrededor de una circunferencia de radio unidad centrada en el origen para los
siguientes campos.
a) a =
1
2
(y + x )
b) a = (xy + 1) +
_
1
2
x
2
+ x + 2
_
10. Encuentre el rotor y el ujo para el campo vectorial
a =
_
x
2
+ y 4
_
+ 3xy+
_
2xz + z
2
_
k
a traves del hemisferio x
2
+ y
2
+ z
2
= 16 con z > 0
11. Muestre la relacion
a
_
_
a =
a
_
a
_
y a partir de ella encuentre las componentes del Laplaciano a en coordenadas cilndricas
12. Muesre que el vector,
A(r) , solucion a la ecuacion
A
_
k
2
A = 0
_
+ k
2
_
A = 0
con la condicion solenoidal
A = 0. La ecuacion
_
+ k
2
_
A = 0 se conoce como la ecuacion de
Helmholtz.
13. Dado un campo de fuerzas
F = r
n
r. Verique si existe una funcion escalar (x, y, z) tal que
F =
(x, y, z) . En el caso de que sea posible, encuentre esa funcion (x, y, z) .
14. En mecanica clasica la cantidad de movimiento viene denida como
L = r p. Para pasar a mecanica
cuantica se asocia r y p con los operadores posicion y cantidad de movimiento los cuales, al operar
sobre la funcion de onda nos proveen
r[ X[ = xr [ = x (r) r[ P
x
[ =
_
i
x
_
r [ = i
x
(r)
r[ Y[ = y r [ = y (r) r[ P
y
[ =
_
i
y
_
r [ = i
y
(r)
r[ Z[ = z r [ = z (r) r[ P
z
[ =
_
i
z
_
r [ = i
z
(r)
Hernandez & N u nez Universidad Industrial de Santander 290
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
En denitiva, en coordenadas cartesianas en la representacion de coordenadas [r tendremos que
r[ R[ = r (r) y r[ P
x
[ = i
(r)
a) Muestre que en Mecanica cuantica las componentes cartesianas del operador cantidad de movi-
miento angular son
r[ L
x
[ = i
_
y
z
z
y
_
(r) ; r[ L
y
[ = i
_
z
x
x
z
_
(r)
r[ L
z
[ = i
_
x
y
y
x
_
(r)
b) Utilizando las deniciones anteriores muestre que el conmutador de las componentes cartesianas
de la cantindad de movimiento angular cumple con
[L
x
, L
y
] = iL
z
y en general
ijk
L
i
L
j
= iL
i
L
L =i
L
con L
1
= L
1
= L
x
; L
2
= L
2
= L
y
; L
3
= L
3
= L
z
y
L = L
x
+L
y
+L
z
k
c) Dados dos Operadores Vectoriales
A y
B que conmtan entre ellos y con
L tales que
_
A,
B
_
=
_
A,
L
_
=
_
L,
B
_
= 0
demuestre entonces que
_
L,
B
L
_
= i
_
A
B
_
L
15. El campo magnetico generado por una corriente I es
B =
0
I
2
_
y
x
2
+ y
2
+
x
x
2
+ y
2
_
Encuentre un vector potencial magnetico,
A, tal que
A =
B
16. Si un campo vectorial tiene la forma
B =
, entonces
B es solenoidal y su potencial vectorial
es:
A =
1
2
_
_
.
17. Dados, el potencial vectorial,
A(r) , del momento magnetico dipolar, m, y la fuerza
F =
B m
_
que registra un momento magnetico dipolar, m, sometido a un campo magnetico externo,
B, muestre
que la fuerza ejercida por un dipolo magnetico sobre otro viene dada por
A
m
(r) =
_
0
4r
3
_
mr
F
m
(r) =
B m
_
_
F
m1m2
=
0
4
_
2m
1r
m
2r
m
1
m
2
m
1z
m
2z
r
3
_
con m = m
r
u
r
+ m
+ m
z
u
z
Hernandez & N u nez Universidad Industrial de Santander 291
Metodos de la Fsica Matematica (Vol 1) BORRADOR PRELIMINAR
18. Desarrolle el Teorema de Gauss para el caso bidimensional. Esto es, suponga una lnea de carga orien-
tada en la direccion del eje z genera un potencial
() = q
ln
2
0
;
E =
con =
_
x
2
+ y
2
19. Pruebe la generalizacion del Teorema de Green
___
V
(r) / (r) (r) / (r) d V = p (r)
__
s
_
(r)
(r) (r)
(r)
_
d
S
donde / es el operador autoadjunto denido por / =
_
p (r)
_
+ q (r)
20. Considere una esfera de radio r = a y carga Q.Graque su potencial electrostatico para 0 < r < .
21. Considere una esfera de densidad uniforme,
0
, radio r = a, y masa M.
a) Muestre que la fuerza gravitacional por unidad de masa es
F =
_
4G0
3r
_
u
r
para 0 < r a
b) Encuentre el potencial gravitacional asociado a esta fuerza
c) Imagine un tunel que atravieza la esfera pasado por su centro. Encentre la ecuacion de movimiento
y la expresion del perodo para una partcula de masa m, que se deja caer por ese t unel.
22. Dado un vector potencial magnetico,
A, tal que
A =
B muestre que
__
s
B d
S =
_
A d r es invariante de calibre:
A(r)
A(r) +
(r)
23. La fuerza de Lorentz para una partcula con carga q que se mueve con una velocidad v en un campo
electrco
E y magnetico
B es
F = q
_
E +v
B
_
. Muestre que
F = q
_
E +v
B
_
E =
A
t
A =
B
_
F =
_
A
dt
+
A v
_
_
Hernandez & N u nez Universidad Industrial de Santander 292
Bibliografa
[1] Apostol, T. M. (1972) Calculus Vol 2 (Reverte Madrid) QA300 A66C3 1972
[2] Arfken, G. B.,Weber, H., Weber, H.J. (2000) Mathematical Methods for Physicists 5ta Edicion
(Academic Press, Nueva York)
[3] Borisenko, A.I, y Tarapov I.E. (1968) Vector and Tensor Analisys (Dover Publications Inc, Nueva
York)
[4] Dennery, P. y Krzywicki, A. (1995) Mathematics for Physicists (Dover Publications Inc, Nueva York)
[5] Gelfand, I.M. (1961) Lectures on Linear .Algebra (John Wiley & Sons Interscience, Nueva York).
[6] Lovelock, D, y Rund, H. (1975) Tensors, Dierential Forms & Variational Principles (John Wiley
Interscience, Nueva York).
[7] Santalo, L.A (1969) Vectores y Tensores (Editorial Universitaria, Buenos Aires)
[8] Schutz, B. (1980) Geometrical Methods in Mathematical Physics (Cambridge University Press,
Londres)
293
Potrebbero piacerti anche
- Simbologia de Pozos PetrolerosDocumento6 pagineSimbologia de Pozos Petrolerosingjavierrios100% (2)
- Influencia de Azufre en PetroleoDocumento9 pagineInfluencia de Azufre en PetroleoDeysi CruzNessuna valutazione finora
- Struct Clase 9Documento26 pagineStruct Clase 9Juan Diego Chamorro100% (1)
- Roca: Definición, dureza, abrasividad y tenacidadDocumento5 pagineRoca: Definición, dureza, abrasividad y tenacidadManu GreinerNessuna valutazione finora
- Informe Lodo Disperso. 1Documento6 pagineInforme Lodo Disperso. 1Javier Andrés Rodríguez De ArmasNessuna valutazione finora
- Tamaño de partículas sedimentariasDocumento11 pagineTamaño de partículas sedimentariasJesús ArroyoNessuna valutazione finora
- Areas y Volumenes en La Geologia PetroleraDocumento16 pagineAreas y Volumenes en La Geologia PetroleraRaul FarfanNessuna valutazione finora
- Cuenca Llano OrientalesDocumento52 pagineCuenca Llano OrientalesEmmanuel Gomez GalvisNessuna valutazione finora
- Origen y evolución del petróleoDocumento1 paginaOrigen y evolución del petróleoJohnnie G. Machaca VargasNessuna valutazione finora
- Las RocasDocumento20 pagineLas RocasJo David100% (7)
- Informe Práctica de Laboratorio - Control de Pérdida de Filtrado APIDocumento3 pagineInforme Práctica de Laboratorio - Control de Pérdida de Filtrado APIHenry Gustavo Chaves Gutiérrez0% (1)
- Orientación de estructuras geológicasDocumento71 pagineOrientación de estructuras geológicasSaid Ivan DominguezNessuna valutazione finora
- Cálculo de La Altura y Del Volumen de La PresaDocumento2 pagineCálculo de La Altura y Del Volumen de La PresaRaeghoNessuna valutazione finora
- Stress en las rocasDocumento75 pagineStress en las rocasDaniel PujadoNessuna valutazione finora
- Antecedentes de La CementaciónDocumento18 pagineAntecedentes de La CementaciónBrendaArnezNessuna valutazione finora
- Informe Salida de Campo 3 DiaDocumento38 pagineInforme Salida de Campo 3 DiaJulietth RojasNessuna valutazione finora
- Mallado Voronoi y simulación de pozos horizontales fracturadosDocumento7 pagineMallado Voronoi y simulación de pozos horizontales fracturadosGasper Mendez GutierrezNessuna valutazione finora
- OPTIMIZACIÓN MULTIVARIABLE IRRESTRICTAv1Documento75 pagineOPTIMIZACIÓN MULTIVARIABLE IRRESTRICTAv1pablo lorenzo muñoz sanchezNessuna valutazione finora
- Toma y Análisis de NúcleosDocumento3 pagineToma y Análisis de NúcleosFrancisco Antonio AlcalaNessuna valutazione finora
- Tema 2 - Ecuación de DifusiónDocumento29 pagineTema 2 - Ecuación de DifusiónLourdes Zarate Jarquin100% (1)
- Molido y Pulverización PDFDocumento45 pagineMolido y Pulverización PDFKarina PuentesNessuna valutazione finora
- Valvulas 14Documento21 pagineValvulas 14anakarenNessuna valutazione finora
- Generalidades Herramientas de Perforacio PDFDocumento77 pagineGeneralidades Herramientas de Perforacio PDFedinson piñerosNessuna valutazione finora
- Recobro AdicionalDocumento7 pagineRecobro AdicionalVictoria MontenegroNessuna valutazione finora
- Tipos de EmpaquetamientoDocumento6 pagineTipos de Empaquetamientobor100% (1)
- Molibdatos y cromatos: minerales de utilidadDocumento6 pagineMolibdatos y cromatos: minerales de utilidadAlberto perez williamNessuna valutazione finora
- Minería a cielo abierto: generalidades y operacionesDocumento22 pagineMinería a cielo abierto: generalidades y operacionesKevin Eduardo0% (1)
- El Método de La Secante y Secante ModificadoDocumento15 pagineEl Método de La Secante y Secante ModificadoJhonnatan PerezNessuna valutazione finora
- GeomecanicaDocumento15 pagineGeomecanicaCony ZepedaNessuna valutazione finora
- 02perfilesdevelocidad Dic 2015Documento28 pagine02perfilesdevelocidad Dic 2015Angely JaimesNessuna valutazione finora
- EJERCICIOS DE FLUJO DE FLUIDOS EN MEDIOS POROSOSDocumento11 pagineEJERCICIOS DE FLUJO DE FLUIDOS EN MEDIOS POROSOSKimberly FrancoNessuna valutazione finora
- Recobro Mejorado CO2Documento32 pagineRecobro Mejorado CO2Christian ArizaNessuna valutazione finora
- Pruebas PVTDocumento42 paginePruebas PVTkrnsamuNessuna valutazione finora
- Ecuaciones de Movimiento en Términos de Las Componentes Radial y TransversalDocumento6 pagineEcuaciones de Movimiento en Términos de Las Componentes Radial y TransversalKarina QuintoNessuna valutazione finora
- Taller Correlacion 2,6Documento4 pagineTaller Correlacion 2,6AníbalUrangoAlcántaraNessuna valutazione finora
- Examen 2 - 2020-2Documento3 pagineExamen 2 - 2020-2NEIL LUIS BAEZ ZAVALANessuna valutazione finora
- Guia de Apoyo 6Documento7 pagineGuia de Apoyo 6Luis Camilo Tapia NuñezNessuna valutazione finora
- Registro LitologicoDocumento15 pagineRegistro LitologicoEdwin Pisco Helguero100% (1)
- Tipos de Petróleo CrudoDocumento2 pagineTipos de Petróleo CrudoHerrera Jorge AgustínNessuna valutazione finora
- Momento de Torsión en 3DDocumento13 pagineMomento de Torsión en 3DRonald Santos TravezañoNessuna valutazione finora
- Problemas Mecánica 2Documento52 pagineProblemas Mecánica 2Buzz LightyearNessuna valutazione finora
- Fundicion Con NoyosDocumento11 pagineFundicion Con NoyosMarioPiracocaNessuna valutazione finora
- Apunte Mecanica 2021.03.01Documento4 pagineApunte Mecanica 2021.03.01Romeo ZxNessuna valutazione finora
- 5.27 Un Termómetro Tiene Una Dinámica de Primer Orden Con Una Constante de Tiempo deDocumento7 pagine5.27 Un Termómetro Tiene Una Dinámica de Primer Orden Con Una Constante de Tiempo deJean Pierre León BravoNessuna valutazione finora
- Sistemas CristalograficosDocumento5 pagineSistemas CristalograficosMarlene Garcia AndradeNessuna valutazione finora
- Reservorio SubsaturadoDocumento3 pagineReservorio SubsaturadoSergio CANessuna valutazione finora
- Dykstra ParsonsDocumento14 pagineDykstra ParsonsMiguel Angel Lara LopezNessuna valutazione finora
- Unidad I GeopresionesDocumento12 pagineUnidad I Geopresionesalex garcia bernalNessuna valutazione finora
- Unidad 3. - MigraciónDocumento11 pagineUnidad 3. - MigraciónGuillermo Almazán Hernández de Reynosa100% (2)
- Ecuación de La DifusividadDocumento5 pagineEcuación de La DifusividadRödrigo CabreraNessuna valutazione finora
- Modelo Geológico IntegradoDocumento13 pagineModelo Geológico IntegradoGuillermo Lira GuzmánNessuna valutazione finora
- Diagrama fases R modelo competenciaDocumento6 pagineDiagrama fases R modelo competenciaEsthefany Torres de la cruzNessuna valutazione finora
- EJERCICIO 7-1 IkokuDocumento5 pagineEJERCICIO 7-1 IkokuIvan Camilo Aldana GallegoNessuna valutazione finora
- Preinforme 01 - Densidad Del LodoDocumento3 paginePreinforme 01 - Densidad Del LodoAndres TaronNessuna valutazione finora
- Vector Tangente Normal BinormalDocumento9 pagineVector Tangente Normal BinormalpepeNessuna valutazione finora
- Unidad 3Documento44 pagineUnidad 3ALAN0% (1)
- Mats 10Documento29 pagineMats 10Diego AguirreNessuna valutazione finora
- Frenet-Serret y Vector TorsiónDocumento13 pagineFrenet-Serret y Vector TorsiónAdrian Alexis Rivera OrtizNessuna valutazione finora
- Modelado de Sistemas Dinamicos1Documento75 pagineModelado de Sistemas Dinamicos1Diego BayonaNessuna valutazione finora
- Singer-Hambre Riqueza MoralidadDocumento7 pagineSinger-Hambre Riqueza MoralidadsombrerodepajaNessuna valutazione finora
- Buffo Trab1Documento3 pagineBuffo Trab1sombrerodepajaNessuna valutazione finora
- Capt 1 Met Mat V00Documento58 pagineCapt 1 Met Mat V00sombrerodepajaNessuna valutazione finora
- Introducción A La Cosmología PDFDocumento12 pagineIntroducción A La Cosmología PDFsombrerodepajaNessuna valutazione finora
- Tercer Previo Geometría Euclidiana SS2013Documento1 paginaTercer Previo Geometría Euclidiana SS2013sombrerodepajaNessuna valutazione finora
- Matrices, Determinantes y Autovectores para FísicosDocumento70 pagineMatrices, Determinantes y Autovectores para FísicossombrerodepajaNessuna valutazione finora
- Vectores Duales y TensoresDocumento40 pagineVectores Duales y TensoressombrerodepajaNessuna valutazione finora
- Modelo CuadráticoDocumento11 pagineModelo CuadráticoCesar MendozaNessuna valutazione finora
- Teoría de GrafosDocumento43 pagineTeoría de GrafosFelipe ENessuna valutazione finora
- Conceptos Básicos de La CienciaDocumento11 pagineConceptos Básicos de La Cienciajulieth mendozaNessuna valutazione finora
- Taller Metodo de CramerDocumento9 pagineTaller Metodo de CramerJuan David saldarriagaNessuna valutazione finora
- S14.s2-Longitud de ArcoDocumento13 pagineS14.s2-Longitud de ArcoVíctor MarchánNessuna valutazione finora
- 1 - A Taller 2Documento5 pagine1 - A Taller 2DANIEL FELIPE RODRIGUEZ GONZALEZNessuna valutazione finora
- Teoría VectoresDocumento39 pagineTeoría VectoresAgus LlanesNessuna valutazione finora
- Examen de PruebaDocumento2 pagineExamen de PruebaFrancisco LópezNessuna valutazione finora
- 04 em 08 Emedpt U3 A9 Equipo6Documento13 pagine04 em 08 Emedpt U3 A9 Equipo6Arik MatNessuna valutazione finora
- 39 Matematicas4Documento272 pagine39 Matematicas4Omar Cabrera86% (7)
- RP-MAT4-K02 - Ficha 2Documento11 pagineRP-MAT4-K02 - Ficha 2LucioErnestoRamosPeña50% (4)
- Problemas SuperposicionDocumento10 pagineProblemas SuperposicionIvan Aldo Chumbes Lopez67% (3)
- Ajuste de Distribuciones de ProbabilidadDocumento35 pagineAjuste de Distribuciones de ProbabilidadJesús Cabrera CabreraNessuna valutazione finora
- REDUCIDODocumento5 pagineREDUCIDOAdriana OchoaNessuna valutazione finora
- Maths Example 23 EsDocumento18 pagineMaths Example 23 EsVcen Van CenvanNessuna valutazione finora
- Historia-del-Álgebra Vs AritméticaDocumento5 pagineHistoria-del-Álgebra Vs AritméticaJuan Carlos Bárcenas Alvis100% (1)
- Estructura CurricularDocumento28 pagineEstructura CurricularprofexNessuna valutazione finora
- Guia de Noveno Segundo PeriodoDocumento9 pagineGuia de Noveno Segundo PeriodoJulis Andres Q. EscobarNessuna valutazione finora
- Tarea Semana-7 (Autoguardado)Documento6 pagineTarea Semana-7 (Autoguardado)mario aguileraNessuna valutazione finora
- G1026 - Anexo 1 Ejercicios y Formato Tarea 2Documento40 pagineG1026 - Anexo 1 Ejercicios y Formato Tarea 2Carlos Andres OsorioNessuna valutazione finora
- Adaptar cuento teatro 40Documento16 pagineAdaptar cuento teatro 40Laycet Gonzalez del AngelNessuna valutazione finora
- Ses Mierc Mat Comparamos FraccionesDocumento7 pagineSes Mierc Mat Comparamos FraccionesMISAEL TORRES AMESNessuna valutazione finora
- Pseudocódigo que pide edad y sexo para verificar si puede votarDocumento6 paginePseudocódigo que pide edad y sexo para verificar si puede votarAbigarey ReyesNessuna valutazione finora
- 2021 - MT - IV - PPT - Sesión3Documento42 pagine2021 - MT - IV - PPT - Sesión3Fernando MonardesNessuna valutazione finora
- Cal Culo Integral 2017Documento170 pagineCal Culo Integral 2017Montiel OscarNessuna valutazione finora
- Guía de Ejercicios de Práctica I ParcialDocumento8 pagineGuía de Ejercicios de Práctica I ParcialCeleo EscoberNessuna valutazione finora
- Actividad4 - Calculo DiferencialintegralDocumento9 pagineActividad4 - Calculo DiferencialintegralJosé Aguirre100% (3)
- Capitulo1 Repaso Probabilidades 20191 PDFDocumento119 pagineCapitulo1 Repaso Probabilidades 20191 PDFJoseNessuna valutazione finora
- Examen Aplazados MN1Documento30 pagineExamen Aplazados MN1Thati MendozaNessuna valutazione finora