Potrebbero piacerti anche
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsDa EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNessuna valutazione finora
- L6208D To L6208PDDocumento16 pagineL6208D To L6208PDwtn2013Nessuna valutazione finora
- 1-Tle6240gp V3 1 1Documento24 pagine1-Tle6240gp V3 1 1Alexandre Da Silva PintoNessuna valutazione finora
- Three Channels Multipower Driver SystemDocumento26 pagineThree Channels Multipower Driver SystemRicardo UrioNessuna valutazione finora
- Quad Power Amplifier With Built-In Voltage Converter: DescriptionDocumento10 pagineQuad Power Amplifier With Built-In Voltage Converter: DescriptionbakaninhaNessuna valutazione finora
- CD22100 - DataSheetDocumento10 pagineCD22100 - DataSheetHao ChungNessuna valutazione finora
- Linear Technology LTC3728EG28400Documento37 pagineLinear Technology LTC3728EG28400Rickz2k8Nessuna valutazione finora
- Features Descriptio: LTC485 Low Power RS485 Interface TransceiverDocumento12 pagineFeatures Descriptio: LTC485 Low Power RS485 Interface TransceiverSidumisile SikhosanaNessuna valutazione finora
- Datasheet Amp DVD Philips Dumbo PDFDocumento17 pagineDatasheet Amp DVD Philips Dumbo PDFfreekenzoNessuna valutazione finora
- Linear - 16-Bit, Ultra Precise, Fast Settling VOUT DACDocumento16 pagineLinear - 16-Bit, Ultra Precise, Fast Settling VOUT DACAtakan OzturKNessuna valutazione finora
- Tle6220gp DatasheetDocumento18 pagineTle6220gp Datasheetmaelo99999Nessuna valutazione finora
- TLC 5540Documento18 pagineTLC 5540EdgarJCNessuna valutazione finora
- Tb62206Fg: Bicd PWM 2 Phase Bipolar Stepping Motor DriverDocumento28 pagineTb62206Fg: Bicd PWM 2 Phase Bipolar Stepping Motor DriverLuis Alejandro Blanco CalvoNessuna valutazione finora
- Dual Intelligent Power Low Side Switch: DescriptionDocumento10 pagineDual Intelligent Power Low Side Switch: DescriptionDan EsentherNessuna valutazione finora
- CD4047Documento9 pagineCD4047Haryadi VjNessuna valutazione finora
- DS16F95, DS36F95 EIA-485/EIA-422A Differential Bus TransceiverDocumento14 pagineDS16F95, DS36F95 EIA-485/EIA-422A Differential Bus Transceivervsc2012Nessuna valutazione finora
- sc7001q Ay 961Documento18 paginesc7001q Ay 961r2c1Nessuna valutazione finora
- LM3530 High Efficiency White LED Driver With Programmable Ambient Light Sensing Capability and I C-Compatible InterfaceDocumento45 pagineLM3530 High Efficiency White LED Driver With Programmable Ambient Light Sensing Capability and I C-Compatible Interfacethoth2487Nessuna valutazione finora
- Ic 3843Documento4 pagineIc 3843nishatiwari82Nessuna valutazione finora
- Ane Str3a100Documento17 pagineAne Str3a100vietanh_askNessuna valutazione finora
- 4 x 10W DUAL/QUAD POWER AMPLIFIER SPECIFICATIONSDocumento18 pagine4 x 10W DUAL/QUAD POWER AMPLIFIER SPECIFICATIONSjesadNessuna valutazione finora
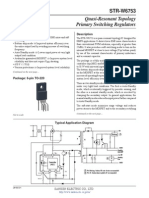
- STR W6753 DatasheetDocumento8 pagineSTR W6753 DatasheetjgerabmNessuna valutazione finora
- Quad Low Side Driver: DescriptionDocumento17 pagineQuad Low Side Driver: DescriptionDan EsentherNessuna valutazione finora
- TDA7396Documento12 pagineTDA7396Caravela CienxcuatroNessuna valutazione finora
- VERTICAL DEFLECTION CIRCUIT DATA SHEETDocumento12 pagineVERTICAL DEFLECTION CIRCUIT DATA SHEETd_richard_dNessuna valutazione finora
- LMC555 CMOS Timer: General Description FeaturesDocumento10 pagineLMC555 CMOS Timer: General Description FeaturesJeremy ObriotNessuna valutazione finora
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDocumento18 pagineADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesMarco MenezesNessuna valutazione finora
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDocumento17 pagineADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesJorge Luis Castillo GuarachiNessuna valutazione finora
- AFT05MP075NDocumento21 pagineAFT05MP075NjeremyAW2SNessuna valutazione finora
- 2.7V Dual Channel 12-Bit A/D Converter With SPI Serial InterfaceDocumento34 pagine2.7V Dual Channel 12-Bit A/D Converter With SPI Serial InterfaceManjunatha Ac100% (1)
- VND830MSP: Double Channel High Side DriverDocumento18 pagineVND830MSP: Double Channel High Side DriverDan EsentherNessuna valutazione finora
- Irams 06 Up 60 ADocumento18 pagineIrams 06 Up 60 AAndré Roberto EvangelistaNessuna valutazione finora
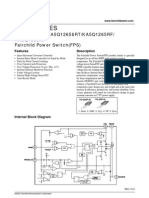
- 5Q1265RFDocumento16 pagine5Q1265RFAron Indra Lezcano GalvezNessuna valutazione finora
- FDocumento20 pagineFfaithfully_fatihNessuna valutazione finora
- VN800S VN800PT: High Side DriverDocumento21 pagineVN800S VN800PT: High Side DriverDan EsentherNessuna valutazione finora
- Dual Bootstrapped 12 V MOSFET Driver With Output Disable ADP3418Documento16 pagineDual Bootstrapped 12 V MOSFET Driver With Output Disable ADP3418Benny RoyNessuna valutazione finora
- Features Applications: X+ X - Y+ YDocumento35 pagineFeatures Applications: X+ X - Y+ YAlvaro ChaconNessuna valutazione finora
- 5Q1265RT - CD1265RTDocumento6 pagine5Q1265RT - CD1265RTJulian Andres Rozo100% (1)
- STRW6252Documento15 pagineSTRW6252miltoncgNessuna valutazione finora
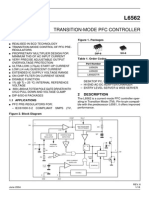
- Transition-Mode PFC Controller: 1 FeaturesDocumento17 pagineTransition-Mode PFC Controller: 1 Featuresadriancho66Nessuna valutazione finora
- 300mA LDO REGULATOR RP114x SERIES DATA SHEETDocumento28 pagine300mA LDO REGULATOR RP114x SERIES DATA SHEETSol De GabrielNessuna valutazione finora
- TDA8925Documento23 pagineTDA8925Mahmoued YasinNessuna valutazione finora
- Ca3306 (A, C)Documento17 pagineCa3306 (A, C)notaden1849Nessuna valutazione finora
- Octal Configurable Low/High Side Driver: DescriptionDocumento18 pagineOctal Configurable Low/High Side Driver: DescriptionDan Esenther100% (1)
- Datasheet 1Documento18 pagineDatasheet 1shashwatthakurNessuna valutazione finora
- Irf7811Avpbf Irf7811Avpbf: Absolute Maximum RatingsDocumento6 pagineIrf7811Avpbf Irf7811Avpbf: Absolute Maximum RatingsnewmailsNessuna valutazione finora
- Tda 7384Documento10 pagineTda 7384totovasiNessuna valutazione finora
- VND810MSP: Double Channel High Side DriverDocumento18 pagineVND810MSP: Double Channel High Side DriverDan EsentherNessuna valutazione finora
- Quad Intelligent Power Low Side Switch: DescriptionDocumento12 pagineQuad Intelligent Power Low Side Switch: DescriptionDan EsentherNessuna valutazione finora
- Hqew Tle5216Documento17 pagineHqew Tle5216Olga PlohotnichenkoNessuna valutazione finora
- 14-Channel Programmable Switchable I C TFT-LCD Reference Voltage Generator With Integrated 4-Channel Static Gamma Drivers FeaturesDocumento10 pagine14-Channel Programmable Switchable I C TFT-LCD Reference Voltage Generator With Integrated 4-Channel Static Gamma Drivers FeaturesRepararelcd LcdNessuna valutazione finora
- R2A20121SP: Synchronous Phase Shift Full-Bridge Control ICDocumento28 pagineR2A20121SP: Synchronous Phase Shift Full-Bridge Control ICdragon-red0816Nessuna valutazione finora
- DS75176B/DS75176BT Multipoint RS-485/RS-422 Transceivers: Features DescriptionDocumento14 pagineDS75176B/DS75176BT Multipoint RS-485/RS-422 Transceivers: Features DescriptionVũ TưởngNessuna valutazione finora
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsDa EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsDa EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsValutazione: 3.5 su 5 stelle3.5/5 (6)
- Beacons of The World: Frequency Callsign Town QTH Loc Erpw AntennaDocumento62 pagineBeacons of The World: Frequency Callsign Town QTH Loc Erpw AntennabaymanNessuna valutazione finora
- PC Express - Dealer's Price ListDocumento2 paginePC Express - Dealer's Price ListJazz AdazaNessuna valutazione finora
- Technology For Life: Medical SolutionsDocumento12 pagineTechnology For Life: Medical SolutionsĐông PhùngNessuna valutazione finora
- Bluetooth To Serial HC-06 Wireless Module: Product DescriptionDocumento5 pagineBluetooth To Serial HC-06 Wireless Module: Product DescriptionYew Wooi JingNessuna valutazione finora
- c240m4 LFF Spec SheetDocumento102 paginec240m4 LFF Spec SheetMahmood RobbinsNessuna valutazione finora
- EMI FIlter DesignDocumento27 pagineEMI FIlter DesignankurmalviyaNessuna valutazione finora
- Sl601p Service ManualDocumento60 pagineSl601p Service Manualvovan15Nessuna valutazione finora
- 750 841 Wago FolderDocumento2 pagine750 841 Wago FolderstgpereiraNessuna valutazione finora
- PC Based Robot Controlling Using Wireless Communication With ASK ModulationDocumento74 paginePC Based Robot Controlling Using Wireless Communication With ASK ModulationSyam Kumar SNessuna valutazione finora
- Data Protek IC Sharp OYEEEEEEEEEEEDocumento1 paginaData Protek IC Sharp OYEEEEEEEEEEEMIMU GDLNessuna valutazione finora
- Manual Talkabout Uniden PDFDocumento2 pagineManual Talkabout Uniden PDFRobert MoralesNessuna valutazione finora
- Topic#1 Introduction To Semiconductors IndustryDocumento28 pagineTopic#1 Introduction To Semiconductors IndustryRio PerezNessuna valutazione finora
- Chapter 3: Hardware-CPUDocumento18 pagineChapter 3: Hardware-CPUHala ZidanNessuna valutazione finora
- Solid State Drives and Digital Control of Electric DrivesDocumento2 pagineSolid State Drives and Digital Control of Electric DrivesRajalearn2 Ramlearn2Nessuna valutazione finora
- Product Support Guide Ricoh Monocromatica Serie4Documento46 pagineProduct Support Guide Ricoh Monocromatica Serie4DavidEspi1990Nessuna valutazione finora
- 1 Vicinity MapDocumento1 pagina1 Vicinity MapRachelNessuna valutazione finora
- Knowles PiezoelectricDocumento1 paginaKnowles PiezoelectriccristosebaceoNessuna valutazione finora
- TDSDocumento2 pagineTDSMahidhar TalapaneniNessuna valutazione finora
- Repair Manual: ChassisDocumento25 pagineRepair Manual: ChassisThomaz Terence MartinsNessuna valutazione finora
- User's Guide: TMS320C5515/14/05/04 DSP Inter-IC Sound (I2S) BusDocumento38 pagineUser's Guide: TMS320C5515/14/05/04 DSP Inter-IC Sound (I2S) BusDiana MaldonadoNessuna valutazione finora
- CMFB DesignDocumento4 pagineCMFB Designaminkhan83Nessuna valutazione finora
- QS Series Rectifiers Data SheetDocumento3 pagineQS Series Rectifiers Data Sheetckean_ngNessuna valutazione finora
- Slides02 Basic Factors AffectingTelevision Transmission ReceptionDocumento48 pagineSlides02 Basic Factors AffectingTelevision Transmission ReceptionClinton Nyachieo100% (1)
- Hantek Tekway DSO v1.03Documento15 pagineHantek Tekway DSO v1.03dirk13Nessuna valutazione finora
- 8085 Microprocessor Architecture and Programming-1Documento92 pagine8085 Microprocessor Architecture and Programming-1ShubhamNessuna valutazione finora
- KD 65 X 8000 CDocumento98 pagineKD 65 X 8000 CkalleNessuna valutazione finora
- PRO LCD C Series InverterDocumento4 paginePRO LCD C Series InverterJuan SanchezNessuna valutazione finora
- Panasonic TX-28,25,21 MD4C TV (Euro4 Chassis) Full Service Manual (English-German) PDFDocumento36 paginePanasonic TX-28,25,21 MD4C TV (Euro4 Chassis) Full Service Manual (English-German) PDFjohnantoNessuna valutazione finora
- CXP-4MT-12: 4.3-10 Male Connector For 1/2" Annular CableDocumento1 paginaCXP-4MT-12: 4.3-10 Male Connector For 1/2" Annular CableCesar RinconNessuna valutazione finora