Potrebbero piacerti anche
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsDa EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNessuna valutazione finora
- AC Motor ReportDocumento8 pagineAC Motor ReportbafulcherNessuna valutazione finora
- A New System of Alternating Current Motors and Transformers and Other EssaysDa EverandA New System of Alternating Current Motors and Transformers and Other EssaysValutazione: 5 su 5 stelle5/5 (1)
- Chapter 1 EIC For StudentDocumento10 pagineChapter 1 EIC For StudentSeysa Estoque NidoyNessuna valutazione finora
- A New System of Alternating Current Motors and TransformersDa EverandA New System of Alternating Current Motors and TransformersValutazione: 1 su 5 stelle1/5 (1)
- ProjectDocumento25 pagineProjectAsif MuhammadNessuna valutazione finora
- Application of DC Shunt MotorDocumento5 pagineApplication of DC Shunt MotorPrajwal Deep RaiNessuna valutazione finora
- SChapter 34Documento9 pagineSChapter 34stban murilloNessuna valutazione finora
- Application of DC Shunt Motor: Lovely Professional University Amit Raj ROLL NO-RB4802A28 Reg. No-10803543 B.Tech - MEDocumento5 pagineApplication of DC Shunt Motor: Lovely Professional University Amit Raj ROLL NO-RB4802A28 Reg. No-10803543 B.Tech - MEshailesh singhNessuna valutazione finora
- Generator and MotorDocumento19 pagineGenerator and Motortrihandoko1631Nessuna valutazione finora
- Basic Motor Theory ExplainedDocumento7 pagineBasic Motor Theory ExplainedSSEKANJAKO PatrickNessuna valutazione finora
- 1 AlternatorDocumento29 pagine1 AlternatorMwasi KivingeNessuna valutazione finora
- Electrical MotorDocumento55 pagineElectrical Motorabdulkadhir100% (1)
- Unit IIIDocumento9 pagineUnit IIIhariNessuna valutazione finora
- Masini ElectriceDocumento10 pagineMasini ElectriceCreanga GabrielNessuna valutazione finora
- Permanent Magnet D.CDocumento5 paginePermanent Magnet D.CNidhiNessuna valutazione finora
- DC Motor ExplainedDocumento3 pagineDC Motor Explainedimran kadriNessuna valutazione finora
- Electrical Basic Generator GuideDocumento27 pagineElectrical Basic Generator GuidesantoshkumarNessuna valutazione finora
- 1 Electric Motor BasicsDocumento13 pagine1 Electric Motor BasicsPandaGendutNessuna valutazione finora
- DC MachineDocumento33 pagineDC MachineJevon WilsonNessuna valutazione finora
- DC MOTOR MATHEMATICAL MODEL AND CONTROL METHODSDocumento15 pagineDC MOTOR MATHEMATICAL MODEL AND CONTROL METHODSSaikumar NemalikantiNessuna valutazione finora
- Motors and Generators: First Hand Investigations From The SyllabusDocumento26 pagineMotors and Generators: First Hand Investigations From The SyllabusAbdullionNessuna valutazione finora
- Origin and History of AC GeneratorsDocumento58 pagineOrigin and History of AC GeneratorsAlfred AgihNessuna valutazione finora
- Wind Engineering - Chap08 - LectureDocumento37 pagineWind Engineering - Chap08 - LectureKağan YalçınNessuna valutazione finora
- Report in Eng Conv DocuDocumento5 pagineReport in Eng Conv DocuRex Albert TejadillaNessuna valutazione finora
- Alternator ToyotaDocumento5 pagineAlternator ToyotaAYON_MSNNessuna valutazione finora
- DcmotorsDocumento16 pagineDcmotorskaran113Nessuna valutazione finora
- Using DC Motors in Fighting RobotsDocumento23 pagineUsing DC Motors in Fighting Robotsshraddha_thakkar_2Nessuna valutazione finora
- What Is A Solar Motor?Documento11 pagineWhat Is A Solar Motor?D K SHARMANessuna valutazione finora
- Physcis Ac Generator ReportDocumento15 paginePhyscis Ac Generator ReportVishal HirrtikNessuna valutazione finora
- TASK:2: 1.generators and Motors 2.trasnformersDocumento24 pagineTASK:2: 1.generators and Motors 2.trasnformersFaiza Tabassam 546-FET/BSEE/F19Nessuna valutazione finora
- Apllied PhysicsDocumento9 pagineApllied PhysicsM. Qasim ZiaNessuna valutazione finora
- Unit 6Documento15 pagineUnit 6idasyarmilaNessuna valutazione finora
- Induction MachinesDocumento11 pagineInduction MachinesTayyab HussainNessuna valutazione finora
- Basic Motor TheoryDocumento39 pagineBasic Motor Theoryarfat_ahmad_khanNessuna valutazione finora
- Electric Motors and GeneratorsDocumento2 pagineElectric Motors and GeneratorsNURSHAHADAH ISMAELNessuna valutazione finora
- March 19, 1968 - R, Kromrey I 3,374,376: Electric GeneratorDocumento8 pagineMarch 19, 1968 - R, Kromrey I 3,374,376: Electric GeneratorVlad AdrianNessuna valutazione finora
- Experimental Research of Magnetic-Gravity EffectsDocumento0 pagineExperimental Research of Magnetic-Gravity Effectsdewidewi76Nessuna valutazione finora
- Assignment Ac DCDocumento10 pagineAssignment Ac DCKamil KhairiNessuna valutazione finora
- HTTPSWWW - Sathyabama.ac - Insitesdefaultfilescourse Material2020 10UNIT II 4 PDFDocumento29 pagineHTTPSWWW - Sathyabama.ac - Insitesdefaultfilescourse Material2020 10UNIT II 4 PDFVigneshwaran J vNessuna valutazione finora
- Electro 3 Finals Task PerformanceDocumento23 pagineElectro 3 Finals Task PerformanceJuan Miguel TorresNessuna valutazione finora
- Ac GeneratorDocumento18 pagineAc GeneratorPrathune KailashNessuna valutazione finora
- Electrical Machines FundamentalsDocumento11 pagineElectrical Machines FundamentalsRochelle De LeonNessuna valutazione finora
- Electrical Drives in Industry: An Introduction to DC MotorsDocumento28 pagineElectrical Drives in Industry: An Introduction to DC Motorsgurunathan14Nessuna valutazione finora
- Russian SEGDocumento9 pagineRussian SEGrichcollins6217Nessuna valutazione finora
- Basic Motor TheoryDocumento48 pagineBasic Motor Theoryantoniogh2Nessuna valutazione finora
- Electric Motors and GeneratorsDocumento21 pagineElectric Motors and Generatorsaskartik3Nessuna valutazione finora
- ELE290 Chapter 6Documento21 pagineELE290 Chapter 6imfendiNessuna valutazione finora
- Understanding AC MachinesDocumento16 pagineUnderstanding AC Machinesdbu2952Nessuna valutazione finora
- Define and Differentiate Between AC Generators and DC GeneratorsDocumento17 pagineDefine and Differentiate Between AC Generators and DC GeneratorsArafatNessuna valutazione finora
- DC MachinesDocumento23 pagineDC MachinesNoyaNessuna valutazione finora
- Pricipio Básico de Funcionamiento Del AlternadorDocumento5 paginePricipio Básico de Funcionamiento Del AlternadorJasonNessuna valutazione finora
- DC Motors ExplainedDocumento12 pagineDC Motors Explaineddynamic_sNessuna valutazione finora
- ASEE 2011 PaperDocumento10 pagineASEE 2011 PaperrivalharudianNessuna valutazione finora
- DC MotorsDocumento25 pagineDC MotorsBruceNessuna valutazione finora
- Generators and MotorsDocumento9 pagineGenerators and Motorseng.muhammad.waterNessuna valutazione finora
- Project Report DC MotorDocumento17 pagineProject Report DC MotorSaad Memon33% (3)
- Types of AlternatorsDocumento12 pagineTypes of AlternatorsHamoudRazaMazherNessuna valutazione finora
- DC MotorDocumento6 pagineDC MotorLeandro CamargoNessuna valutazione finora
- Plant Utilities & Safety: Prime MoversDocumento90 paginePlant Utilities & Safety: Prime Moversaimi wahabNessuna valutazione finora
- Dell M4800 Lock TsDocumento4 pagineDell M4800 Lock TsbafulcherNessuna valutazione finora
- AlternatorDocumento6 pagineAlternatorbafulcherNessuna valutazione finora
- HW1-Design OptimizationDocumento1 paginaHW1-Design OptimizationbafulcherNessuna valutazione finora
- Bond Graph HW 10Documento1 paginaBond Graph HW 10bafulcherNessuna valutazione finora
- Maxwell's Equations: F Ib × DLDocumento7 pagineMaxwell's Equations: F Ib × DLbafulcherNessuna valutazione finora
- ME392C Design Optimization and Automation Course ScheduleDocumento16 pagineME392C Design Optimization and Automation Course SchedulebafulcherNessuna valutazione finora
- Magnetic BearingsDocumento8 pagineMagnetic BearingsbafulcherNessuna valutazione finora
- Morlet TransformationDocumento2 pagineMorlet TransformationbafulcherNessuna valutazione finora
- Portable Box Stand: How To Build ADocumento5 paginePortable Box Stand: How To Build AJohn E FosterNessuna valutazione finora
- Addison EEG ReviewDocumento45 pagineAddison EEG ReviewTruong Phong TuyenNessuna valutazione finora
- AQA Further Pure Mathematics 4: Matrices Section 1: Matrix AlgebraDocumento3 pagineAQA Further Pure Mathematics 4: Matrices Section 1: Matrix AlgebraPham Viet AnhNessuna valutazione finora
- Perhitungan Pressure Vessel LengkapDocumento70 paginePerhitungan Pressure Vessel LengkapReo Aditya MahesaNessuna valutazione finora
- .. Armin Hermann, The Genesis of Quantum Theory (1899-1913)Documento12 pagine.. Armin Hermann, The Genesis of Quantum Theory (1899-1913)P. R. SREENIVASANNessuna valutazione finora
- Gas Laws: Ideal and Real GaesDocumento38 pagineGas Laws: Ideal and Real GaesAnonymous Hntzyz7Nessuna valutazione finora
- ProblemSet3 SolutionsDocumento8 pagineProblemSet3 SolutionsnormanNessuna valutazione finora
- Wind Power PlantDocumento12 pagineWind Power PlantMohamad SaadNessuna valutazione finora
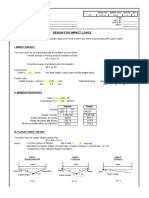
- Drop Object-Plastic HingeDocumento8 pagineDrop Object-Plastic HingeBolarinwaNessuna valutazione finora
- Torque Vs Tension Interpretation Instructions Rev 6Documento25 pagineTorque Vs Tension Interpretation Instructions Rev 6Kurt Kandora MontroneNessuna valutazione finora
- January 2007 QP - M2 EdexcelDocumento12 pagineJanuary 2007 QP - M2 EdexcelBeder MirjanNessuna valutazione finora
- Quantum Field Theory A Modern Introduction (Michio Kaku)Documento8 pagineQuantum Field Theory A Modern Introduction (Michio Kaku)Daniel Parra0% (1)
- Tension Test ReportDocumento7 pagineTension Test Reportzgts100% (1)
- Constant Acceleration Equations ExplainedDocumento2 pagineConstant Acceleration Equations ExplainedmdmarufurNessuna valutazione finora
- Theory and Simulation of Crystal GrowthDocumento47 pagineTheory and Simulation of Crystal GrowthDerya KaradenizNessuna valutazione finora
- Lect 17Documento26 pagineLect 17vatsalp3Nessuna valutazione finora
- Energy Unit - UbDDocumento3 pagineEnergy Unit - UbDKarl McBurnettNessuna valutazione finora
- How To Calculate TorqueDocumento6 pagineHow To Calculate TorqueAiza Caboles100% (1)
- b2 Symmetry and RelativityDocumento70 pagineb2 Symmetry and RelativityAndrew OrrNessuna valutazione finora
- Heat Transfer Chapter One and TwoDocumento74 pagineHeat Transfer Chapter One and TwoTariku Negash100% (2)
- Fyp Final Report Template (Guideline)Documento14 pagineFyp Final Report Template (Guideline)Arif ZukriNessuna valutazione finora
- Continuum Mechanics HW On Index NotationDocumento4 pagineContinuum Mechanics HW On Index NotationIlbey KarakurtNessuna valutazione finora
- NDT Syllabus NIT TrichyDocumento17 pagineNDT Syllabus NIT Trichykhizer mohamedNessuna valutazione finora
- Mastering Physics Homework SolutionDocumento11 pagineMastering Physics Homework SolutionPengintaiNessuna valutazione finora
- Homework 3 Vector Algebra and CalculusDocumento3 pagineHomework 3 Vector Algebra and CalculusSwathi BDNessuna valutazione finora
- What Are Electromagnetic Waves?Documento67 pagineWhat Are Electromagnetic Waves?nhixoleNessuna valutazione finora
- Study of The Optical Properties of Poly (Methyl Methacrylate) (PMMA) Doped With A New Diarylethen CompoundDocumento10 pagineStudy of The Optical Properties of Poly (Methyl Methacrylate) (PMMA) Doped With A New Diarylethen CompoundHuỳnh Minh KhôiNessuna valutazione finora
- Introduction To CATIA V5: Release 16 (A Hands-On Tutorial Approach)Documento33 pagineIntroduction To CATIA V5: Release 16 (A Hands-On Tutorial Approach)Vinoth KumarNessuna valutazione finora
- BIIODocumento4 pagineBIIOTimothy RandallNessuna valutazione finora
- Energy For ProductivityDocumento65 pagineEnergy For ProductivityNurettinAlpNessuna valutazione finora
- MORRIS JR., J. W. Overview of Dislocation Plasticity.Documento36 pagineMORRIS JR., J. W. Overview of Dislocation Plasticity.Vitor Scarabeli BarbosaNessuna valutazione finora
- 5 - Flow Through Packed BedsDocumento24 pagine5 - Flow Through Packed BedsاشرفاللساميNessuna valutazione finora
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDa EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeValutazione: 5 su 5 stelle5/5 (8)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDa EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionValutazione: 4.5 su 5 stelle4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsDa EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsValutazione: 4 su 5 stelle4/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesDa EverandThe Rare Metals War: the dark side of clean energy and digital technologiesValutazione: 5 su 5 stelle5/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingDa EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingValutazione: 4 su 5 stelle4/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemDa EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNessuna valutazione finora
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDa EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionValutazione: 4 su 5 stelle4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveDa EverandUnderstanding Automotive Electronics: An Engineering PerspectiveValutazione: 3.5 su 5 stelle3.5/5 (16)
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionNessuna valutazione finora
- 8051 Microcontroller: An Applications Based IntroductionDa Everand8051 Microcontroller: An Applications Based IntroductionValutazione: 5 su 5 stelle5/5 (6)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesDa EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesValutazione: 5 su 5 stelle5/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsDa EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsValutazione: 5 su 5 stelle5/5 (2)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowDa EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNessuna valutazione finora
- Current Interruption Transients CalculationDa EverandCurrent Interruption Transients CalculationValutazione: 4 su 5 stelle4/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Da EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Valutazione: 5 su 5 stelle5/5 (1)
- Build Your Own Electric Vehicle, Third EditionDa EverandBuild Your Own Electric Vehicle, Third EditionValutazione: 4.5 su 5 stelle4.5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinDa EverandThe Graphene Revolution: The Weird Science of the Ultra-thinValutazione: 4.5 su 5 stelle4.5/5 (4)
- Beginner's Guide to Reading Schematics, Fourth EditionDa EverandBeginner's Guide to Reading Schematics, Fourth EditionValutazione: 3.5 su 5 stelle3.5/5 (10)
- Operational Amplifier Circuits: Analysis and DesignDa EverandOperational Amplifier Circuits: Analysis and DesignValutazione: 4.5 su 5 stelle4.5/5 (2)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsDa EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsValutazione: 5 su 5 stelle5/5 (3)
- Electrical Principles and Technology for EngineeringDa EverandElectrical Principles and Technology for EngineeringValutazione: 4 su 5 stelle4/5 (4)