Potrebbero piacerti anche
- DankienDocumento18 pagineDankiendoantranuyennhiNessuna valutazione finora
- Variable Neighbourhood Search For Uncapacitated Warehouse Location ProblemsDocumento6 pagineVariable Neighbourhood Search For Uncapacitated Warehouse Location ProblemserpublicationNessuna valutazione finora
- Multi-Swarm Pso Algorithm For The Quadratic Assignment Problem: A Massive Parallel Implementation On The Opencl PlatformDocumento21 pagineMulti-Swarm Pso Algorithm For The Quadratic Assignment Problem: A Massive Parallel Implementation On The Opencl PlatformJustin WalkerNessuna valutazione finora
- A Computational Comparison of Two Different Approaches To Solve The Multi-Area Optimal Power FlowDocumento4 pagineA Computational Comparison of Two Different Approaches To Solve The Multi-Area Optimal Power FlowFlores JesusNessuna valutazione finora
- +++375201080 UPL Design Using Microsoft Excel PDFDocumento7 pagine+++375201080 UPL Design Using Microsoft Excel PDFcabmendesNessuna valutazione finora
- Genetic Algorithm For Vehicle Routing Problem With BackhaulsDocumento8 pagineGenetic Algorithm For Vehicle Routing Problem With BackhaulsYuri Adixs Ucux'saeNessuna valutazione finora
- A Goal Driven Prototype Column Generation Strategy F - 2015 - European Journal oDocumento11 pagineA Goal Driven Prototype Column Generation Strategy F - 2015 - European Journal ojulio perezNessuna valutazione finora
- A Tabu Search AlgorithmDocumento19 pagineA Tabu Search Algorithmmmaruys2Nessuna valutazione finora
- Ingeniería y Ciencia 1794-9165: Issn: Ingciencia@eafit - Edu.coDocumento27 pagineIngeniería y Ciencia 1794-9165: Issn: Ingciencia@eafit - Edu.coCésar SantanaNessuna valutazione finora
- Minimisation Cost ProblemsDocumento11 pagineMinimisation Cost ProblemsEl Anbari AhmedNessuna valutazione finora
- Arithmetic Complexity, Kleene Closure, and Formal Power SeriesDocumento27 pagineArithmetic Complexity, Kleene Closure, and Formal Power SeriesUdit AgarwalNessuna valutazione finora
- The Six Elements To Block-Building Approaches For The Single Container Loading ProblemDocumento15 pagineThe Six Elements To Block-Building Approaches For The Single Container Loading Problemcys1316568848Nessuna valutazione finora
- Parallel Knapsack ProblemDocumento15 pagineParallel Knapsack ProblemAyush MariaNessuna valutazione finora
- (David Pisinger) Where Are The Hard Knapsack ProblemsDocumento14 pagine(David Pisinger) Where Are The Hard Knapsack Problemswalrod22Nessuna valutazione finora
- Lecture 15Documento5 pagineLecture 15Mahesh GondiNessuna valutazione finora
- Clustering Large Data Sets With Mixed Numeric and Categorical ValuesDocumento14 pagineClustering Large Data Sets With Mixed Numeric and Categorical ValuesNurlita Kusuma DewiNessuna valutazione finora
- Using The Confusion Matrix For Improving Ensemble ClassifiersDocumento5 pagineUsing The Confusion Matrix For Improving Ensemble ClassifiersRitu YadavNessuna valutazione finora
- Avella 05 - BCP CFLPDocumento27 pagineAvella 05 - BCP CFLPjtex2Nessuna valutazione finora
- Relaxations and Discretizations For The Pooling Problem: Noname Manuscript NoDocumento28 pagineRelaxations and Discretizations For The Pooling Problem: Noname Manuscript Nokhaled_behery9934Nessuna valutazione finora
- CS 229, Summer 2019 Problem Set #3 SolutionsDocumento19 pagineCS 229, Summer 2019 Problem Set #3 SolutionsSasanka Sekhar SahuNessuna valutazione finora
- Class Pattern RecognitionDocumento6 pagineClass Pattern RecognitionMehvish TamkeenNessuna valutazione finora
- Wjmsvol 09 No 01 Paper 07Documento8 pagineWjmsvol 09 No 01 Paper 07hasan basriNessuna valutazione finora
- Fast Approximate Energy Minimization Via Graph CutsDocumento18 pagineFast Approximate Energy Minimization Via Graph Cutskarnati87Nessuna valutazione finora
- Easy Multiple Kernel Learning: January 2014Documento7 pagineEasy Multiple Kernel Learning: January 2014David GiraldoNessuna valutazione finora
- The Standard Template Library (STL)Documento8 pagineThe Standard Template Library (STL)DarkHawkESPNessuna valutazione finora
- 2m PDFDocumento5 pagine2m PDFSAKTHI SANTHOSH BNessuna valutazione finora
- g8 Mathematics Florida StandardsDocumento6 pagineg8 Mathematics Florida Standardsapi-265506863Nessuna valutazione finora
- LclogitDocumento16 pagineLclogitENUNessuna valutazione finora
- An Algorithm For Set Covering ProblemDocumento9 pagineAn Algorithm For Set Covering ProblemdewyekhaNessuna valutazione finora
- A Note On An L-Approach For Solving The Manufacturer's Pallet Loading ProblemDocumento10 pagineA Note On An L-Approach For Solving The Manufacturer's Pallet Loading ProblemMehmet AkverdiNessuna valutazione finora
- A Survey of Lot Sizing and Scheduling ModelsDocumento10 pagineA Survey of Lot Sizing and Scheduling ModelsClebson CardosoNessuna valutazione finora
- Knapsack Problem Algorithm AnalysisDocumento13 pagineKnapsack Problem Algorithm Analysissibtay zahraNessuna valutazione finora
- Florian Diedrich Et Al - Approximation Algorithms For 3D Orthogonal KnapsackDocumento12 pagineFlorian Diedrich Et Al - Approximation Algorithms For 3D Orthogonal KnapsackMnaomNessuna valutazione finora
- 2669 Maximal Margin Labeling For Multi Topic Text CategorizationDocumento8 pagine2669 Maximal Margin Labeling For Multi Topic Text CategorizationAnurag SharmaNessuna valutazione finora
- 1 s2.0 S0377221705008416 MainDocumento21 pagine1 s2.0 S0377221705008416 MainAyesha Maher khanNessuna valutazione finora
- Algorithms For Model-Based Gaussian Hierarchical ClusteringDocumento16 pagineAlgorithms For Model-Based Gaussian Hierarchical ClusteringDiana ArunNessuna valutazione finora
- Int. J. Production Economics: Ching-Jung Ting, Chia-Ho ChenDocumento11 pagineInt. J. Production Economics: Ching-Jung Ting, Chia-Ho ChenRogelio FlorenciaNessuna valutazione finora
- El Fallahi 2008Documento17 pagineEl Fallahi 2008Anurag DeepakNessuna valutazione finora
- Different Simplex MethodsDocumento7 pagineDifferent Simplex MethodsdaselknamNessuna valutazione finora
- Journal of Statistical Software: Multilevel IRT Modeling in Practice With The Package MlirtDocumento16 pagineJournal of Statistical Software: Multilevel IRT Modeling in Practice With The Package MlirtabougaliaNessuna valutazione finora
- An Efficient Algorithm For The Evaluation of Convolution IntegralsDocumento22 pagineAn Efficient Algorithm For The Evaluation of Convolution IntegralsCarlangasPardoNessuna valutazione finora
- Generalizing Mlps With Dropouts, Batch Normalization, and Skip ConnectionsDocumento10 pagineGeneralizing Mlps With Dropouts, Batch Normalization, and Skip ConnectionsAnil Kumar BNessuna valutazione finora
- Cache-Oblivious Algorithms: E A Matteo Frigo Charles E. Leiserson Harald Prokop Sridhar RamachandranDocumento13 pagineCache-Oblivious Algorithms: E A Matteo Frigo Charles E. Leiserson Harald Prokop Sridhar RamachandranAnees AbdulNessuna valutazione finora
- Warehouse Optimization Model Based On Genetic AlgoDocumento7 pagineWarehouse Optimization Model Based On Genetic AlgoTuncay KamasNessuna valutazione finora
- 2008 Infinite Kernel Learning Via Infinite AnDocumento34 pagine2008 Infinite Kernel Learning Via Infinite AnRiri LestariNessuna valutazione finora
- Economic Order Quantity Model For DeteriDocumento7 pagineEconomic Order Quantity Model For DeteriBambangIrawan48Nessuna valutazione finora
- Communications On Pure and Applied Analysis Volume 11, Number 1, January 2012Documento26 pagineCommunications On Pure and Applied Analysis Volume 11, Number 1, January 2012Jonas RollerNessuna valutazione finora
- A Numerical Study of The Limited Memory BFGS Method and The Truncated-Newton Method For Large Scale OptimizationDocumento15 pagineA Numerical Study of The Limited Memory BFGS Method and The Truncated-Newton Method For Large Scale OptimizationパプリカNessuna valutazione finora
- Multi-Physics Simulations in Continuum Mechanics: Hrvoje JasakDocumento10 pagineMulti-Physics Simulations in Continuum Mechanics: Hrvoje JasakoguierNessuna valutazione finora
- Algorithms For The Multi-Item Multi-Vehicles Dynamic Lot Sizing ProblemDocumento13 pagineAlgorithms For The Multi-Item Multi-Vehicles Dynamic Lot Sizing ProblemMuhamad Fauzi ResdianNessuna valutazione finora
- A Modularization-Based Approach To Finding All Justifications For OWL DL EntailmentsDocumento15 pagineA Modularization-Based Approach To Finding All Justifications For OWL DL EntailmentsOmr SvncNessuna valutazione finora
- A Cellular Genetic Algorithm For Multiobjective OptimizationDocumento12 pagineA Cellular Genetic Algorithm For Multiobjective Optimizationrogeriocosta37Nessuna valutazione finora
- AbaqusExplicit+1 2 8+VUELDocumento11 pagineAbaqusExplicit+1 2 8+VUELDakhlaouiNessuna valutazione finora
- Iccgi 2013 11 30 10133Documento5 pagineIccgi 2013 11 30 10133Chandrasekhar ReddyNessuna valutazione finora
- Gama-Nguyen2008 Chapter PredictingLatticeReductionDocumento21 pagineGama-Nguyen2008 Chapter PredictingLatticeReductionnijoge6161Nessuna valutazione finora
- Graph Partitioning Advance Clustering TechniqueDocumento14 pagineGraph Partitioning Advance Clustering TechniqueijcsesNessuna valutazione finora
- A Relational Approach To The Compilation of Sparse Matrix ProgramsDocumento16 pagineA Relational Approach To The Compilation of Sparse Matrix Programsmmmmm1900Nessuna valutazione finora
- Supervised Training Via Error Backpropagation: Derivations: 4.1 A Closer Look at The Supervised Training ProblemDocumento32 pagineSupervised Training Via Error Backpropagation: Derivations: 4.1 A Closer Look at The Supervised Training ProblemGeorge TsavdNessuna valutazione finora
- V75i03 PDFDocumento24 pagineV75i03 PDFPushpa ChoudharyNessuna valutazione finora
- Library AssignmentsDocumento3 pagineLibrary AssignmentsdraganmatkeNessuna valutazione finora
- 6.EE.a Introducing Equivalent Expressions 1Documento1 pagina6.EE.a Introducing Equivalent Expressions 1draganmatkeNessuna valutazione finora
- 3D Printer (FFF Tehnologija) 3D Printer (Fused Filament Fabrication (FFF) )Documento2 pagine3D Printer (FFF Tehnologija) 3D Printer (Fused Filament Fabrication (FFF) )draganmatkeNessuna valutazione finora
- Cjenovnik Automobili 2014Documento1 paginaCjenovnik Automobili 2014draganmatkeNessuna valutazione finora
- 6.EE.a.1 Exponent Experimentation 2Documento1 pagina6.EE.a.1 Exponent Experimentation 2draganmatkeNessuna valutazione finora
- 6.EE.a.1 Exponent Experimentation 3Documento3 pagine6.EE.a.1 Exponent Experimentation 3draganmatkeNessuna valutazione finora
- 6.EE.A.1 Exponent Experimentation 1 PDFDocumento1 pagina6.EE.A.1 Exponent Experimentation 1 PDFdraganmatkeNessuna valutazione finora
- Fib FrogDocumento2 pagineFib FrogdraganmatkeNessuna valutazione finora
- 6.EE.a.1 The Djinni S OfferDocumento4 pagine6.EE.a.1 The Djinni S OfferdraganmatkeNessuna valutazione finora
- 6.EE.a.1 Sierpinski S CarpetDocumento5 pagine6.EE.a.1 Sierpinski S CarpetdraganmatkeNessuna valutazione finora
- 6.EE.a.1 Seven To The WhatDocumento5 pagine6.EE.a.1 Seven To The WhatdraganmatkeNessuna valutazione finora
- Scalability of Routing: Compactness and Dynamics: Dmitri Krioukov (CAIDA)Documento33 pagineScalability of Routing: Compactness and Dynamics: Dmitri Krioukov (CAIDA)draganmatkeNessuna valutazione finora
- 02 GarbageCollectionDocumento102 pagine02 GarbageCollectiondraganmatkeNessuna valutazione finora
- System Software: 1. Memory Management 2. Garbage Collection 3. Linkers and Loaders 4. Debuggers 5. Text EditorsDocumento30 pagineSystem Software: 1. Memory Management 2. Garbage Collection 3. Linkers and Loaders 4. Debuggers 5. Text EditorsdraganmatkeNessuna valutazione finora
- RIL AGM Presentation SlidesDocumento44 pagineRIL AGM Presentation SlidesDeshGujaratNessuna valutazione finora
- Home,: A Solace To Which A Journey Is Never Too Long..Documento25 pagineHome,: A Solace To Which A Journey Is Never Too Long..Duvonto RealtyNessuna valutazione finora
- 17 Free Data Science Projects To Boost Your Knowledge & SkillsDocumento18 pagine17 Free Data Science Projects To Boost Your Knowledge & SkillshamedfazelmNessuna valutazione finora
- Kalzip - Vapour Layer FR 0822 PDFDocumento2 pagineKalzip - Vapour Layer FR 0822 PDFBerat CakmakliNessuna valutazione finora
- Manual PSW 2600Documento18 pagineManual PSW 2600Jc C. GomezNessuna valutazione finora
- ABB LMU 574 - mcd80Documento12 pagineABB LMU 574 - mcd80gadware2011bplNessuna valutazione finora
- ctc-189 Answerbook PDFDocumento136 paginectc-189 Answerbook PDFmenosoft100% (1)
- 91 194 DCDocumento57 pagine91 194 DCGusdeluxeNessuna valutazione finora
- 80010360Documento2 pagine80010360mdisicNessuna valutazione finora
- ASTM C158-02 (2012) Strength of Glass by Flexure (Determination of Modulus of Rupture)Documento9 pagineASTM C158-02 (2012) Strength of Glass by Flexure (Determination of Modulus of Rupture)Cristian Perez100% (1)
- EOT CRANE - Rev 2Documento6 pagineEOT CRANE - Rev 2Koushik BhaumikNessuna valutazione finora
- WinDNC - V05 - 02 English PDFDocumento2 pagineWinDNC - V05 - 02 English PDFAnonymous XXKCjKnc0Nessuna valutazione finora
- Scarifier 9 Piecies Tooth TypeDocumento2 pagineScarifier 9 Piecies Tooth Typeangga setyawanNessuna valutazione finora
- MV Reg CleanDocumento32 pagineMV Reg CleanJose Alberto CostaNessuna valutazione finora
- Catalogo Towel RailsDocumento1 paginaCatalogo Towel RailsrodijammoulNessuna valutazione finora
- Instrument Panel - Standard: 1988 Toyota CelicaDocumento26 pagineInstrument Panel - Standard: 1988 Toyota CelicaToua Yaj100% (1)
- Uptake and Distribution of Inhalational AnaestheticsDocumento125 pagineUptake and Distribution of Inhalational Anaestheticsharsha mummakaNessuna valutazione finora
- While Start Drive Test Learning, You Must Know The Basic Things! These All Conotents Are at Introductory LevelDocumento15 pagineWhile Start Drive Test Learning, You Must Know The Basic Things! These All Conotents Are at Introductory LevelRakesh SolankiNessuna valutazione finora
- Invalid Keyword Argument Python - December 25 2017Documento3 pagineInvalid Keyword Argument Python - December 25 2017Kaleab TekleNessuna valutazione finora
- Bsee201 B - Fluid MechanicsDocumento150 pagineBsee201 B - Fluid MechanicsMarvin GagarinNessuna valutazione finora
- Astm A769 PDFDocumento5 pagineAstm A769 PDFCristian OtivoNessuna valutazione finora
- 2014 Summer Model Answer PaperDocumento20 pagine2014 Summer Model Answer Papercivil gpkpNessuna valutazione finora
- UAMDocumento35 pagineUAMVishnu R PuthusseryNessuna valutazione finora
- Career Cluster SurveyDocumento6 pagineCareer Cluster Surveydaaiyahnaim100% (1)
- Starboard Strategies Issue 13-MinDocumento28 pagineStarboard Strategies Issue 13-MinkrishnamrutamNessuna valutazione finora
- Education Abbreviation by AffairsCloudDocumento6 pagineEducation Abbreviation by AffairsCloudgsaijanardhanNessuna valutazione finora
- Electrochemical Measurement of Diffusible Hydrogen in Steels (Barnacle Electrode)Documento6 pagineElectrochemical Measurement of Diffusible Hydrogen in Steels (Barnacle Electrode)Faiber AndrésNessuna valutazione finora
- SY-5SSM V1.1 SY-5SSM/5 V1.1 Super 7 Motherboard: User's Guide & Technical ReferenceDocumento88 pagineSY-5SSM V1.1 SY-5SSM/5 V1.1 Super 7 Motherboard: User's Guide & Technical Referencealopezcuervo82190% (1)
- SIMODUAL2 Industrial Double Containment Piping System - Dual Pipes For Double The ProtectionDocumento32 pagineSIMODUAL2 Industrial Double Containment Piping System - Dual Pipes For Double The Protectionrade.paripovicNessuna valutazione finora
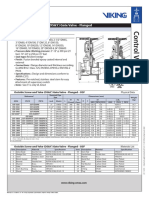
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocumento2 pagineOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoNessuna valutazione finora