Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Vanzo Lecture Notes
Caricato da
Luca MenghiniCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Vanzo Lecture Notes
Caricato da
Luca MenghiniCopyright:
Formati disponibili
Corso di Relativit`a: prima parte
Prof. L. Vanzo
1
Dipartimento di Fisica, Universit`a di Trento
17 dicembre 2009
1
vanzo@science.unitn.it
Sommario
Negli ultimi decenni dellottocento si pensava alle onde elettromagnetiche come a pertur-
bazioni di un etere immobile, dotato anche di propriet`a meccaniche. Questo pose per le
discipline siche quello che era, forse, il principale problema scientico dellepoca: dimo-
strare sperimentalmente lesistenza delletere e determinarne le propriet`a meccaniche ed
elettromagnetiche. Tuttavia, e in parte sorprendentemente
1
, nessuno dei vari esperimenti
tentati riusc mai in quellintento. Oggi si pu`o dire che quegli esperimenti misero in luce
essenzialmente i limiti dei concetti di spazio e tempo della sica classica newtoniana, e la
necessit`a di una loro revisione
2
.
Come tutti sanno, la forma denitiva di questa revisione `e opera di A. Einstein e for-
ma la base concettuale della teoria della relativit`a ristretta, o speciale. Questa teoria `e
basata sullosservazione che in mancanza di segnali che si propagano immediatamente,
non `e possibile confrontare il tempo di eventi distanti se prima non si adotta una con-
venzione per sincronizzare (o regolare) gli orologi. Si vedr`a che ci`o ha condotto Einstein
a un nuovo concetto di tempo. Questo argomento e le sue conseguenze nei campi della
meccanica e dellelettrodinamica formano il corpo principale del corso di relativit`a. La
meccanica dei uidi, la statistica e la termodinamica relativistica saranno considerate solo
marginalmente.
Lestensione del principio di relativit`a ai sistemi di riferimento accelerati, considerata da
Einstein epistemologicamente necessaria, condusse a una seconda, e pi` u radicale, revisione
dei concetti di spazio e tempo. Losservazione (sempre di Einstein) che una trasforma-
zione arbitraria delle coordinate spazio-temporali `e indistinguibile da un cambiamento
del campo gravitazionale `e il fondamento della sua teoria relativistica della gravitazione,
la relativit` a generale che `e alla base della recente, intensa attivit`a di ricerche nel campo
cosmologico, e che sar`a introdotta nella seconda parte di questo corso.
I seguenti appunti raccolgono una sintesi dei temi trattati a lezione, e non devono in alcun
modo essere considerati un sostituto dei testi. Per i necessari approfondimenti si rimanda
allo studio dei libri indicati nella bibliograa.
1
La necessit`a delletere era sostenuta da alcuni fra i migliori scienziati dellepoca.
2
In appendice D sono citati i testi di W. Pauli, di C. Mller e di Panofski e Phillips, dove si trova una
introduzione storica dettagliata al periodo pre-relativistico.
Indice
1 Simmetrie non relativistiche 4
1.1 Considerazioni generali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Sistemi di riferimento e coordinate . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Il gruppo di Galilei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.1 Sistemi inerziali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.2 Trasformazioni di Galilei . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.3 Struttura di gruppo . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4 Relativit`a e meccanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.4.1 Addizione delle velocit`a . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4.2 Equazioni del moto di Newton . . . . . . . . . . . . . . . . . . . . . 10
1.4.3 Sistemi continui: il uido perfetto e la conduzione del calore . . . . 11
1.4.4 Lequazione di Schrodinger . . . . . . . . . . . . . . . . . . . . . . . 13
1.4.5 Il principio di relativit`a . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5 Ottica non relativistica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5.1 onde piane e velocit`a di fase . . . . . . . . . . . . . . . . . . . . . . 15
1.5.2 la velocit`a di gruppo . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5.3 La velocit`a della luce nei dielettrici trasparenti . . . . . . . . . . . . 17
1.5.4 Laberrazione e leetto Doppler . . . . . . . . . . . . . . . . . . . . 18
1.6 Esperienze di ne secolo XIX . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.6.1 Hoek . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.6.2 Fizeau e Fresnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.6.3 Michelson e Morley . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.6.4 Interpretazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.7 Esperienze moderne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2 Fondamenti di relativit`a speciale 24
2.1 Assiomi di Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.1.1 Osservazioni sui postulati . . . . . . . . . . . . . . . . . . . . . . . 25
2.1.2 La denizione del tempo . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2 Le trasformazioni di Lorentz . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.1 Condizioni sulle trasformazioni . . . . . . . . . . . . . . . . . . . . 28
2.2.2 Trasformazioni speciali, o boosts . . . . . . . . . . . . . . . . . . . . 29
2.2.3 La pi` u generale trasformazione di Lorentz . . . . . . . . . . . . . . 31
2.3 Lunghezze e intervalli di tempo . . . . . . . . . . . . . . . . . . . . . . . . 33
2.4 Laddizione delle velocit`a . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.5 La luce nei dielettrici trasparenti . . . . . . . . . . . . . . . . . . . . . . . 35
2.5.1 Eetto Doppler e aberrazione secondo la relativit`a . . . . . . . . . . 36
1
3 Formalismo quadridimensionale ed equazioni invarianti 38
3.1 Prodotto scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2 Gruppo di Lorentz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.3 Tensori e campi di tensori . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.3.1 tensori algebrici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.3.2 campi tensoriali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.4 Equazioni invarianti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.4.1 Equazione di Klein-gordon . . . . . . . . . . . . . . . . . . . . . . . 42
3.4.2 Equazione di Proca . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.5 Il tempo proprio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.6 Il cono luce e le relazioni causali . . . . . . . . . . . . . . . . . . . . . . . . 45
3.7 Curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Dinamica relativistica di una particella 47
4.1 quantit`a di moto, energia e forza . . . . . . . . . . . . . . . . . . . . . . . 47
4.2 formule di trasformazione . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3 sistemi di particelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.4 Equazioni del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.5 Moto uniformemente accelerato, o iperbolico . . . . . . . . . . . . . . . . . 51
4.6 E = mc
2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.7 decadimento di particelle ed energie di soglia . . . . . . . . . . . . . . . . . 54
4.8 Il moto dello spin e la precessione di Thomas . . . . . . . . . . . . . . . . . 54
4.9 Principio variazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5 Elettrodinamica covariante 57
5.1 Forma covariante delle equazioni . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2 Corrente elettrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.3 Trasformazione dei campi . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.4 Elettrodinamica fenomenologica . . . . . . . . . . . . . . . . . . . . . . . . 62
6 Principi variazionali 64
6.1 Equazioni di Eulero e Lagrange . . . . . . . . . . . . . . . . . . . . . . . . 64
6.2 Azione per il campo elettromagnetico . . . . . . . . . . . . . . . . . . . . . 66
6.3 Azione per le particelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.4 Il tensore energia-impulso . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.4.1 Caso generale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.4.2 Campo scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6.4.3 Campo elettromagnetico . . . . . . . . . . . . . . . . . . . . . . . . 71
6.4.4 Fluido perfetto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6.4.5 Particelle libere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7 Teoria della gravitazione 78
7.1 Il principio di equivalenza . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.2 Metrica e gravitazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
7.2.1 Moto di una particella . . . . . . . . . . . . . . . . . . . . . . . . . 82
7.2.2 Distanze spaziali e intervalli di tempo . . . . . . . . . . . . . . . . . 85
2
8 Appendici 88
A Invarianza della fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
B La delta di Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
C Funzioni di Green . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
D Testi di Riferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
E Argomeni da studiare per lesame . . . . . . . . . . . . . . . . . . . . . . . 93
3
Capitolo 1
Simmetrie non relativistiche
Dal punto di vista di un sico moderno una teoria relativistica
1
`e innanzitutto una teoria
in accordo con i postulati di Einstein e, dunque, una teoria invariante di Lorentz. Ma
sarebbe errato pensare che il principio di relativit`a non esistesse prima di Einstein; la
meccanica classica di Galileo-Huygens-Newton e le sue numerose ramicazioni, soddisfa
anchessa a un principio di relativit`a, eccetto che il gruppo di simmetria `e il gruppo di
Galilei, diverso dal gruppo di Lorentz. Questultimo ha la stessa dimensione del gruppo
di Galilei e quindi il suo ruolo, propriamente, non `e tanto quello di introdurre il principio
di relativit`a, quanto di ripristinare il principio gi`a esistente in una forma che sia valida
anche per lelettrodinamica di Maxwell-Lorentz.
In questo capitolo discuteremo brevemente le simmetrie non relativistiche soprattutto
nel campo della meccanica e dellottica, allo scopo di identicare quelle assunzioni in-
giusticate la cui rimozione ha portato inne al punto di rottura creato dalla teoria di
Einstein.
1.1 Considerazioni generali
Due osservatori aventi posizione, orientamento e velocit` a diverse descrivono lo stato di
un sistema sico in modo diverso. Per esempio, se si tratta di particelle gli assegnano
coordinate e velocit`a diverse oppure, se si tratta di un sistema quantistico, gli assegnano
vettori diversi del suo spazio di Hilbert.
Ma come si calcolano le nuove coordinate e velocit`a, o i nuovi vettori? Questa `e una
materia delicata che riette in larga misura le nostre opinioni sulla natura delle simmetrie
spazio-temporali. In generale, esistono uno o pi` u gruppi di trasformazioni, operanti sullo
spazio delle fasi o sullo spazio di Hilbert, i quali deniscono una legge di trasformazione
degli stati ; la struttura di gruppo tiene conto dellidea naturale che tali applicazioni si
possano comporre e invertire. Per esempio, se si associa ad ogni rotazione nello spazio
una matrice ortogonale 33, allora alla rotazione inversa `e associata linversa della matrice
e a due rotazioni eseguite in successione `e associata la matrice che risulta dal prodotto
delle due. Linsieme delle rotazioni, con questa corrispondenza, forma un gruppo continuo
isomorfo al gruppo ortogonale SO(3) delle matrici ortogonali 3 3.
C`e uninterpretazione passiva delle trasformazioni, secondo la quale il cambiamento dello
stato `e attribuito al cambiamento dellosservatore e allora si aerma, un p`o vagamente, che
1
In assenza di gravitazione.
4
il gruppo trasforma un osservatore nellaltro. Ma si pu`o anche dare uninterpretazione
attiva, secondo la quale losservatore resta lo stesso ma si ha un cambiamento reale dello
stato.
Si noti poi che le applicazioni di cui parliamo non sono la stessa cosa delle operazioni reali
con cui si cambiano eettivamente posizione, orientamento o velocit`a degli osservatori,
tuttavia per comodit`a noi non faremo questa distinzione. Parleremo quindi di una rota-
zione sia per indicare una rotazione sica dellosservatore (o dello stato), sia come di un
elemento del gruppo matematico delle matrici ortogonali 3 3.
Ora, se per eetto di queste applicazioni i risultati delle misure, o pi` u esattamente delle
predizioni osservabili della teoria, non cambiano, allora si parla di operazioni di simmetria,
e del gruppo corrispondente come di un gruppo di simmetria (spazio-temporale, per la
precisione). In questo caso si deve imporre che il gruppo preservi le equazioni della sica
e si ha quindi un principio di relativit` a, cio`e si aerma che le leggi della sica sono le
stesse per gli osservatori le cui posizioni, velocit` a e orientamento relativi sono connesse
da elementi del gruppo di simmetria.
Questo modo di presentare le cose tende per`o a mascherare il fatto essenziale che una
teoria relativistica intende soprattutto occuparsi della relativit`a del moto, piuttosto che
della relativit`a di orientamento o di posizione. Il termine chiave `e dunque velocit` a, ed `e
allora essenziale che il gruppo contenga elementi che corrispondono a osservatori in moto
relativo, per parlare veramente di relativit`a. Se il gruppo include le traslazioni temporali,
allora le leggi sono anche le stesse ad ogni tempo.
Si noti che non si considerano osservatori con accelerazioni diverse, un problema che
richiederebbe lintroduzione della relativit`a generale. Daltronde laccelerazione ha eetti
meccanici che si possono rivelare anche stando allinterno di una cassa chiusa, e dunque
una simmetria che rendesse equivalenti due osservatori relativamente accelerati sembra, a
prima vista, del tutto impossibile.
Nel seguito studieremo i due principali esempi di simmetria spazio-temporale che si trova-
no in sica e i corrispondenti principi di relativit`a: la simmetria galileiana che caratterizza
la meccanica di Galileo e Newton, brevemente, e la simmetria di Lorentz che caratterizza
la relativit`a ristretta, estensivamente. Lenfasi sar`a posta evidentemente sulla relativit`a
del moto, il concetto in cui le due simmetrie si dierenziano maggiormente.
1.2 Sistemi di riferimento e coordinate
Dato che i moti relativi sono i soli che si osservano, per una descrizione razionale del moto
e degli altri fenomeni sici `e essenziale introdurre quello che in sica si chiama un sistema
di riferimento. Esso denisce uno standard convenzionale di quiete e le procedure per
la misura e la registrazione permanente, o temporanea, delle coordinate di posizione e di
tempo degli eventi
2
.
Si riconosce facilmente che i metodi usati allo scopo si basano tutti su due fatti fonda-
mentali. Il primo `e lesistenza di corpi rigidi le cui propriet`a sono in ottimo accordo con
gli assiomi e le proposizioni della geometria euclidea. Limmagine scolastica del sistema
di riferimento formato da tre piani rigidi ortogonali, poi idealizzato nei tre assi ortogonali
orientati, ha infatti la sua origine nella geometria euclidea e nei corpi rigidi. Le coordinate
2
Come avverte B. Schutz nel suo ottimo libro, un sistema di riferimento non `e semplicemente una
persona con il binoccolo, ma un sosticato sistema di raccolta dati.
5
cartesiane hanno infatti il semplice signicato sico di lunghezze misurate mediante regoli
rigidi.
In secondo luogo lesistenza dei campi elettromagnetici (campi EM), con la loro enorme
velocit`a di propagazione, `e sucientemente semplice e universale da rendere possible il
loro impiego per la misura delle coordinate (anche qui in accordo con assiomi e proposi-
zioni della geometria euclidea, ma non solo). Per esempio, il global positioning system[1]
(GPS) `e una tecnologia sosticata per la determinazione delle coordinate che fa uso di
satelliti e segnali EM di alta frequenza. Le coordinate sono qui determinate non mediante
luso di regoli rigidi, ma da misure eettuate con segnali elettromagnetici e coinvolgono
inevitabilmente la propagazione della radiazione EM. In entrambi i casi, le coordinate
spaziali sono misurabili e possiedono un diretto signicato sico.
La coordinata temporale `e invece determinata dal fatto che possiamo attribuire a certi
moti (la rotazione della terra o le oscillazioni di un pendolo), un carattere idealizzato e
privilegiato. Cio`e si assume che il moto degli oggetti privilegiati , che chiameremo orologi,
non inuenzi n`e sia inuenzato dagli oggetti che si vogliono indagare. C`e il problema
importante di quanto queste ipotesi siano compatibili con le leggi della sica, ma possiamo
anticipare che lo sono per un vasto dominio di fenomeni.
Il carattere idealizzato degli orologi fornisce un concetto di tempo altrettanto idealizzato,
essenzialmente equivalente al tempo assoluto di Newton, del quale egli aermava che
in s`e e per sua natura, senza relazione ad alcunche di esterno, scorre uniformemente e
con altro nome `e chiamato durata. Newton era estremamente consapevole del fatto che
potrebbero non esistere moti rigorosamente uniformi con cui misurare il tempo, e forse
proprio per questo introdusse la sua denizione di tempo assoluto.
Il carattere idealizzato degli orologi `e ancora pi` u marcato nelle teorie quantistiche ma non
pu`o essere mantenuto, per esempio, in relativit`a generale perche il ritmo degli orologi `e
inuenzato dal campo gravitazionale, e dunque anche dalle sue sorgenti. Al contrario che
del tempo, nelle teorie quantistiche non relativistiche le coordinate spaziali sono invece
osservabili soggette a dispersione, e dunque si riferiscono non solo alloggetto osservato ma
anche allo strumento che le misura. Questo fa s che in tali teorie lo spazio e il tempo siano
trattati in maniera completamente dierente. Nello svolgimento della relativit`a ristretta
le problematiche legate alla teoria quantistica saranno comunque completamente ignorate.
Vi sono altre idealizzazioni, meno importanti, di cui faremo spesso uso; per esempio, si
pu`o parlare delle coordinate di un evento di emissione su una stella lontana, anche se di
solito nessuno si preoccupa di misurarle veramente. Un altra idealizzazione che useremo
sar`a il riferirsi ai sistemi di riferimenti come se fossero sistemi di coordinate (abbr. SC).
1.3 Il gruppo di Galilei
1.3.1 Sistemi inerziali
Si sa per esperienza che esistono sistemi di riferimento nei quali una particella libera (cio`e
non soggetta allazione di forze esterne) si muove con velocit`a costante, unaermazione
importante vecchia di alcuni secoli e nota come la legge di inerzia
3
. Questi sono i sistemi
di riferimento inerziali (abbr. SI), rispetto ai quali le equazioni del moto assumono la
3
Per una discussione approfondita si veda E. Mach, La meccanica nel suo sviluppo storico critico,
Universale Scientica Boringhieri, 1977.
6
forma semplice descritta da Newton nei Principia (la legge forza=massa x accelerazione
e le sue ramicazioni, come i sistemi di particelle o i corpi rigidi).
Ovviamente laccelerazione pu`o essere zero solo rispetto a un tempo opportuno, cio`e
rispetto a un moto uniforme opportuno, e quindi la legge di inerzia implica una scelta
del tempo. Assumeremo quindi, come parte della denizione di un sistema di riferimento
inerziale, che sia possibile costruire, o usare, orologi idealizzati che siano consistenti con
la legge di inerzia. Lo chiameremo il tempo universale. Con buona approssimazione, e
per gli scopi pratici della vita quotidiana come ad esempio la denizione di un orario
ferroviario, un tale orologio `e la sfera celeste delle stelle sse, che segna il tempo siderale.
E1: Sia t il tempo universale e = f(t) una funzione monotona crescente di t. Si calcoli
laccelerazione di una particella considerando come il nuovo tempo. Si deduca che la
legge di inerzia resta valida se e solo se = at +b, con a e b arbitrari ma a > 0.
`
E appena il caso di sottolineare che siccome lassenza di forze si pu`o accertare solo con
lassenza di accelerazioni, un SI non `e esattamente denibile, a meno che le sorgenti
di forza non siano tutte esattamente note. Ma per quanto riguarda la legge di inerzia `e
altrettanto chiaro che ogni riferimento che si muove con moto traslatorio uniforme rispetto
a un sistema inerziale `e esso stesso inerziale, e dunque che esiste uninnit`a di tali sistemi.
Si pone il problema di trovare la formula di trasformazione delle coordinate associate a una
coppia arbitraria di sistemi inerziali. Per le coordinate useremo la notazione vettoriale,
con x = (x, y, z) e il signicato usuale di x, y e z come di lunghezze misurate lungo i
rispettivi assi orientati (le coordinate cartesiane).
1.3.2 Trasformazioni di Galilei
Se i sistemi inerziali F
e F sono in moto relativo uniforme con velocit`a costante v, in
meccanica classica si considerano come fondamentalmente evidenti le seguenti formule di
trasformazione
x
= R x +vt +a (3.1)
t
= t + (3.2)
dove R `e la matrice ortogonale (RR
T
= 1) che rappresenta una rotazione e la notazione
R x denota, come al solito, il prodotto righe per colonne di R con x. Una descrizione
prosaica delle formule direbbe allora che losservatore O
presente in F
vede lorigine di F
muoversi con velocit`a v e transitare per il punto a nellistante t
= (o equivalentemente
t = 0); inoltre i versori degli assi orientati di F e F
sono connessi dalla rotazione R, nel
senso che
e
j
=
3
i=1
R
ij
e
i
(3.3)
e lorologio di O appare indietro di secondi rispetto a quello identico di O
. Loperazione
corrispondente descrive una traslazione temporale.
E2: Si mostri che una rotazione e una traslazione spaziale commutano se e solo se la
traslazione `e diretta lungo lasse di rotazione.
7
Le formule scritte sono convenienti per studiare la struttura di gruppo delle trasformazioni
galileiane. Talvolta `e pi` u conveniente immaginare che F
sia il sistema mobile e F il
sistema del laboratorio considerato in quiete. Allora le coordinate dello stesso punto
nei rispettivi SI sono connesse dalle formule equivalenti
x
= R
1
(x vt a) (3.4)
Se v = 0 la formula descrive lazione combinata di rotazioni (x R x) e traslazioni
(x x a), che per`o non hanno niente a che vedere con il moto relativo. Per scopi
pratici possiamo eliminare il ricorso alle rotazioni e alle traslazioni richiedendo che i sistemi
coincidano esattamente per t = t
= 0. Allora si ha la trasformazione di Galilei speciale
x
= x vt (un boost, in inglese) o, per esteso,
x
= x v
x
t (3.5)
y
= y v
y
t (3.6)
z
= z v
z
t (3.7)
e t
= t.
`
E importante rendersi conto che queste trasformazioni contengono, oltre al
moto relativo, anche certe assunzioni sulla natura dello spazio e del tempo, o meglio,
sul comportamento di regoli e orologi in movimento. Per esempio, adottando lequazione
t = t
, si assume che si possano costruire orologi il cui ritmo non dipende dalla loro
velocit`a. Laltra assunzione riguarda le distanze: le trasformazioni galileiane implicano
immediatamente linvarianza della distanza spaziale
|x
| = |R (x y)| = |x y|
dove |x| = (x
2
+ y
2
+ z
2
)
1/2
. In altre parole, si assume che si possano costruire regoli
standard la cui lunghezza non dipende dallo stato di moto. Entrambe queste assunzioni
sono ingiusticate. Di fatto, il tempo assoluto `e lassunzione che non si pu`o mantenere
in una teoria dove opera una velocit`a massima per la propagazione dei segnali, se le leggi
sono locali. Oggi sappiamo che la massima velocit`a in natura `e raggiunta dalla radiazione
elettromagnetica nel vuoto (o dai fotoni), con il valore approssimato
c = 2, 99792 10
10
cm sec
1
300.000 Km/sec.
e forse da qualche altra particella, come ad esempio i neutrini. Per il resto, le formule
di trasformazione corrispondono evidentemente allidea di uno spazio vettoriale euclideo,
dove le operazioni fondamentali sono quelle dellalgebra lineare, o pi` u generalmente del-
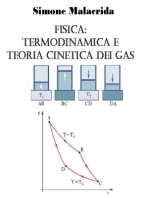
lalgebra ane (uno spazio vettoriale `e uno spazio ane con la scelta di unorigine, v.
gura).
1.3.3 Struttura di gruppo
Le trasformazioni descritte dalle equazioni (3.1) e (3.2) formano un gruppo continuo a
dieci dimensioni, G, denominato gruppo di Galilei. Usiamo la notazione
g = (R, v, a, )
per indicare la trasformazione galileiana (3.1), (3.2) con rotazione R, velocit`a relativa v,
traslazione spaziale a e traslazione temporale e scriviamo
g
_
x
t
_
=
_
R x +vt +a
t +
_
8
vt
K
K
x
x
Figura 1.1: x
= x vt
per indicare lazione dellelemeno g sulle coordinate x, t. Analogamente, sia
g
= (R
, v
, a
)
Allora iterando la formula di trasformazione si ottiene facilmente il prodotto
g
g = (R
R, R
v +v
, R
a +v
+a
+ ) (3.8)
Lidentit`a `e lelemento e = (1, 0, 0, 0), e si verica facilmente che con queste operazioni
linsieme delle g forma un gruppo. Quanto alla dimensione, si noti che occorrono tre
angoli per specicare R, tre numeri reali per v, tre per a e uno per , per un totale di
dieci numeri reali indipendenti. Questo `e tutto ci`o che si intende dicendo che il gruppo
ha dimensione dieci (anche se G non `e uno spazio vettoriale).
E3: (i) Si provi a realizzare G e la formula del prodotto (3.8) mediante un gruppo di
matrici 5 5 con lusuale prodotto di matrici; (ii) dato g G si trovi il suo inverso, cio`e
lelemento g
1
tale gg
1
= g
1
g = e; (iii) si mostri che si pu`o ottenere una traslazione
spaziale combinando un boost con una traslazione temporale.
1.4 Relativit`a e meccanica
Occupiamoci della relazione del gruppo di Galilei con le equazioni del moto. Nella descri-
zione classica del moto, per ogni particella si hanno tre variabili di posizione funzioni del
tempo, che `e comune a tutte. Le leggi del moto eguagliano le forze per unit`a di massa con
le accelerazioni e sono dunque, tecnicamente, sistemi di equazioni dierenziali ordinarie
del secondo ordine. Lassegnazione delle forze e dei dati iniziali `e allora tutto ci`o che serve
per trattare matematicamente il problema del moto (cio`e il calcolo della traiettoria, per
esempio le orbite dei pianeti). La teoria delle equazioni dierenziali implica anche il de-
terminismo della sica classica, cio`e il fatto che la traiettoria `e localmente univocamente
determinata dalle condizioni iniziali.
9
1.4.1 Addizione delle velocit`a
Due semplici conseguenze delle trasformazioni di Galilei sono innanzitutto la formula di
addizione delle velocit`a, secondo la quale
u
= u v (4.1)
e che si deriva dierenziando lespressione x
= x vt. Siano allora
langolo tra u
e v
e quello tra u e v; poniamo anche u = |u|, ecc. Dal teorema di addizione si hanno le
formule (vericare)
u
sin
= u sin, u
cos
= u cos v (4.2)
tan
=
sin
cos v/u
(4.3)
u
= v cos
+
_
v
2
cos
2
+u
2
v
2
(4.4)
Laltra conseguenza `e il carattere assoluto dellaccelerazione
a
=
du
dt
=
du
dt
= a
Useremo questi due risultati per vericare linvarianza galileiana di alcune equazioni
dinamiche che si incontrano nella sica classica newtoniana.
E4: Un nuotatore straordinario, capace di una velocit`a di 5 m/s in acqua ferma, procede in
un ume per 50 metri contro una corrente di 3 m/s e ritorna poi al punto di partenza con la
corrente a favore. Un secondo nuotatore di pari abilit`a attraversa il ume ortogonalmente,
con andata e ritorno da riva a riva, distanti ancheesse 50 m. Chi termina per primo la
gara? Si deducano formule generali nel caso che velocit`a e distanze del problema siano
generiche; si denoti con c la velocit`a dei nuotatori e con v quella del ume, la distanza sia
L.
1.4.2 Equazioni del moto di Newton
Lesempio paradigmatico di sistema dinamico sono le equazioni del moto di Newton per
N punti materiali soggetti a forze centrali, cio`e
m
d
2
x
dt
2
=
U =
=
U
r
|x
|
(4.5)
dove
indica il gradiente rispetto alla variabile x
e lenergia potenziale U descrive
uninterazione a due particelle del tipo
U(r
12
, r
13
, . . . ) =
N
>=1
U
(r
) = U
12
(r
12
) +U
13
(r
13
) + + U
32
(r
32
) + (4.6)
La terza legge del moto `e soddisfatta se il potenziale U
dipende solo dalla distanza
r
= |x
|, benche non vi sia alcuna dicolt`a di principio a introdurre potenziali
10
che coinvolgono tre o pi` u particelle alla volta. Classici esempi di interazione a due par-
ticelle sono linterazione gravitazionale di masse puntiformi e linterazione elettrostatica
coulombiana.
Nella dinamica newtoniana le masse sono assolute
4
e dunque lo sono anche le forze.
`
E
allora immediato constatare che le equazioni del moto (4.5) sono invarianti o, pi` u esat-
tamente, covarianti per trasformazioni di Galilei. Ovviamente se R, v o a dipendessero
dal tempo questo non sarebbe pi` u vero, un fatto che ha impressionato Newton, pare, pi` u
dellinvarianza galileiana appena descritta.
E5: Vericare esplicitamente questo fatto, per esempio supponendo che v dipenda dal
tempo. Come cambia la (4.1)? Si verichi anche la propriet`a di covarianza delle (4.5).
Osservazione: Si potrebbe chiedersi quale sia il gruppo massimale di covarianza delle
equazioni del moto (4.5) e se questo abbia un signicato sico, ma si scopre che questo
dipende solo incidentalmente dal tipo di forze applicate e dalla forma dellenergia poten-
ziale. Per esempio, se due particelle interagiscono con forze centrali la simmetria include
formalmente il gruppo delle rotazioni in quattro dimensioni (SO(4) anziche SO(3)). Per
una particella libera il gruppo di covarianza `e unestensione del gruppo di Galilei a un
gruppo di dimensione dodici, detto gruppo di Schrodinger. Anche questo gruppo cessa di
rappresentare simmetrie non appena si introducano le interazioni. Queste simmetrie sono
dunque accidentali e non le prenderemo in esame. Tuttavia non `e mai opportuno dimen-
ticarsene completamente. Infatti, se esistono buone ragioni per imporre simmetrie extra,
oltre a quelle gi`a imposte dal principio di relativit`a, queste possono diventare strumenti
potenti per generalizzare le teorie siche. Gran parte degli sviluppi moderni nella sica
delle particelle elementari sono infatti derivati da argomenti di questo tipo.
1.4.3 Sistemi continui: il uido perfetto e la conduzione del
calore
Un secondo esempio `e fornito dal moto isoentropico di un uido perfetto. Le equazioni
sono quelle di Eulero
u
i
t
+u u
i
=
1
p
x
i
(4.7)
dove u(t, x) `e il campo di velocit`a del uido, p `e la pressione e la densit`a di massa,
soddisfacente allequazione di continuit`a
t
+ div(u) = 0 (4.8)
Per chiudere il sistema di equazioni deve anche essere assegnata unequazione di stato,
esprimente p in funzione di , per esempio lequazione barotropica p = ( 1). Le
trasformazioni di Galilei devono ora tenere conto del fatto che le variabili sono campi,
cio`e che dipendono anche dalla posizione oltre che dal tempo. Tuttavia, le formule di
trasformazione sono abbastanza evidenti: per losservatore inerziale in F
si avr`a
u
(t, x
) = u(t, x
+vt) v (4.9)
4
Scelto un corpo standard che fornisca ununit` a di massa, la altre masse possono essere determinate
usando il principio di azione e reazione, per esempio mediante collisioni, ed `e invariante.
11
(t, x
) = (t, x
+vt), p
(t, x
) = p(t, x
+vt) (4.10)
Queste formule dicono semplicemente che la densit`a e la pressione in ogni punto del uido
sono le stesse per entrambi gli osservatori, mentre i campi di velocit`a dieriscono solo per
un moto collettivo di traslazione uniforme. Infatti, dato che x
+vt = x, i secondi membri
di queste equazioni sono realmente valutati in x.
Ora `e facile mostrare che le equazioni del moto del uido sono covarianti galileiane.
E6: Provare laermazione appena fatta.
In presenza di viscosit`a si deve aggiungere al secondo membro delle (4.7) il termine
u
dove > 0 `e il coeciente di viscosit`a, e si hanno cos le equazioni di Navier-Stokes. Il
nuovo termine `e invariante galileiano, come si vede usando la (4.9).
La novit`a di questo caso rispetto alle particelle puntiformi `e stata la necessit`a di introdurre
una legge di trasformazione di nuovo tipo. Nel prossimo esempio, il calore, vedremo come
la richiesta di covarianza pu`o anche suggerire una forma pi` u corretta di unequazione
sica.
Lequazione della propagazione del calore in un corpo solido immobile diventa, nel caso
semplice di corpi omogenei e isotropi, la seguente equazione per la distribuzione della
temperatura T nel corpo
T
t
=
2
T (4.11)
dove `e la conducibilit`a termica (funzione della temperatura e della pressione, in gene-
rale). Se T `e un campo scalare, cio`e se
T
(x
, t) = T(x
+vt, t) (4.12)
allora si vede subito che la (4.11) non `e invariante, in quanto
T
t
=
T
t
+v T
Il termine di trasporto, v T, pu`o essere eliminato solo se nellequazione originale vi
`e un termine di trasporto analogo. Deduciamo dunque che lequazione del calore per un
corpo in movimento con velocit`a u deve essere corretta con un termine analogo:
T
t
+u T =
2
T (4.13)
Poiche u = u
+v, lequazione `e ora covariante.
Dal punto di vista della teoria delle rappresentazioni del gruppo di Galilei, il quadrivet-
tore q = (
T, T) si trasforma come una delle due possibili rappresentazioni quadrivetto-
riali del gruppo: detto (, ) il quadrivettore generico si ha (per trasformazioni di Galilei
speciali: x
= x vt)
= +v ,
=
12
oppure
= ,
= + v
Infatti
=
T +v T,
= T
Il prossimo esempio mostrer`a che non sempre la formula di trasformazione `e evidente.
1.4.4 Lequazione di Schrodinger
Nel caso della particella libera, lequazione di Schrodinger che sostituisce la legge classica
v = 0 `e (con = 1)
i
t
=
1
2m
2
(4.14)
Linvarianza per traslazioni e rotazioni `e evidente se si denisce la trasformazione attiva
della funzione donda nel seguente modo
5
(x, t) = (R x +a, t + ) (4.15)
Si noti che lapplicazione
`e unitaria rispetto al prodotto scalare
(, ) =
_
R
3
(x)(x) d
3
x
Consideriamo il boost x
= x vt. Ora la formula di trasformazione `e pi` u complicata:
con qualche calcolo si verica facilmente che la nuova funzione donda
(x, t) = exp
_
i
mv
2
2
t +mv x
_
(x +vt, t) (4.16)
soddisfa ancora lequazione di Schrodinger e che la trasformazione
`e unitaria.
E7: Si scrivano le trasformazioni passive che corrispondono alle trasformazioni attive
(4.15) e (4.16).
E8: Si scriva lequazione di Schrodinger per due particelle identiche interagenti con un po-
tenziale del tipo (4.6), adattato a due particelle, e si verichi la covarianza dellequazione
generalizzando opportunamente la (4.16).
E9: Si aggiunga al secondo membro della (4.14) un termine di potenziale U(r), r = |x|.
Lequazione `e ancora covariante galileiana? Qual`e il gruppo manifesto di simmetria?
La formula di trasformazione (4.16) introduce una fase che dipende dalla velocit`a relativa.
`
E quindi interessante osservare che se fosse possibile misurare la fase relativa di due
particelle con masse diverse allora, eettuando un boost, si potrebbe misurare la velocit`a
relativa dei due sistemi inerziali. Si dice allora che la simmetria galileiana, o il principio
5
La versione passiva `e
(x
, t) = (x, t), dove x = R x
+a.
13
di relativit`a, impone una regola di superselezione, secondo la quale non sarebbe possibile
preparare combinazioni lineari di stati descriventi particelle con masse diverse.
Osservazioni. La formula di trasformazione (4.16) sembra scritta ad hoc per avere la
covarianza dellequazione di Schrodinger. Naturalmente il fatto notevole `e che una tale
formula esista, e si pu` o chiedersi allora se non vi sia un modo sistematico per trovare
le formule di trasformazione in casi pi` u complicati. La materia che si occupa di questi
problemi `e una teoria matematica nota come teoria della rappresentazione dei gruppi. Essa
fornisce la classicazione delle formule di trasformazione possibili e determina il carattere
delle grandezze che si trasformano o, come si suol dire, lo spazio della rappresentazione.
Gli esempi discussi sopra deniscono tre rappresentazioni del gruppo di Galilei: la prima
opera sullo spazio vettoriale dei vettori di posizione delle particelle, la seconda sullo spazio
dei campi vettoriali che dipendono dal punto e dal tempo, la terza sullo spazio di Hilbert
della particella libera di massa m.
1.4.5 Il principio di relativit`a
Il fatto che le equazioni del moto siano identiche in tutti i sistemi di riferimento inerziali, se
le formule di trasformazione sono quelle di Galilei, `e la versione matematicamente precisa
dellaermazione euristica nota come principio di relativit` a galileiano, secondo il quale lo
svolgimento dei fenomeni meccanici `e identico in tutti i sistemi di riferimento inerziali.
In particolare, non sar`a possibile determinare la velocit`a di un laboratorio installato in
un SI compiendovi esperimenti meccanici su sistemi isolati (cio`e disaccoppiati dal mondo
esterno) e dunque non sar`a nemmeno possibile, per esempio, determinare la velocit`a
assoluta della terra (la velocit`a riferita allo spazio assoluto).
E10: Si supponga che F
sia uniformemente accelerato rispetto al SI F: si dimostri che le
equazioni del moto in F
sono identiche alle equazioni che si userebbero in F in presenza
di un campo gravitazionale uniforme. Si pu`o usare questa propriet`a come argomento per
estendere il principio di relativit`a ai sistemi uniformemente accelerati?
1.5 Ottica non relativistica
Nuove opportunit`a e nuovi problemi sorgono per`o in relazione ai fenomeni connessi con
la propagazione della luce. Infatti le equazioni di Maxwell non hanno la propriet`a di
covarianza richiesta dal principio di relativit`a galileiano, cio`e non sono invarianti per
trasformazioni di Galilei. Per capirlo basta notare che la velocit`a di un impulso elet-
tromagnetico dipende dal sistema di riferimento, se vale la (4.1), mentre le equazioni di
Maxwell predicono che sia indipendente dal moto della sorgente e uguale alla costante
universale c che compare nelle equazioni stesse.
Lo stesso Maxwell pensava che le sue equazioni valessero in una classe limitata di sistemi
di riferimento, quelli in quiete rispetto al cosiddetto etere, una sostanza imponderabile
ed elastica presente nelluniverso, che si credeva propagasse la luce e rendesse possibili i
fenomeni elettromagnetici, alla stessa maniera che un gas `e necessario per la propagazione
del suono.
Ma se `e cos` allora dovrebbe essere possibile misurare la velocit`a assoluta della terra,
perche il suo moto attraverso letere causerebbe un drift in grado di alterare la velocit`a
della luce a seconda della sua direzione di propagazione.
14
Ma se non sappiamo quali sono le equazioni elettromagnetiche in un riferimento mobile,
come si possono trattare i fenomeni elettromagnetici in un riferimento terrestre, in mo-
vimento rispetto alletere? La maniera pi` u semplice e diretta `e determinare leetto del
gruppo di Galilei sulle caratteristiche di unonda elettromagnetica piana.
1.5.1 onde piane e velocit`a di fase
Si consideri unonda piana che si propaga nel piano z = 0, cio`e il versore di propagazione
sia nel piano (x, y). Nel sistema di riferimento assoluto, F, dove letere `e immobile, la
fase dellonda `e
F(t, x, y) =
_
t
xcos +y sin
c
_
=
_
t
r
c
_
c `e la velocit`a di fase, uguale in F alla velocit`a della luce nel vuoto, `e la frequenza e
n = (cos , sin) `e il versore che indica la direzione di propagazione. Espressa in funzione
delle coordinate del sistema inerziale F
in moto rispetto a F, che sono x
= x vt,
y
= y, t
= t, la fase diventa
F(t, x, y) =
_
t
(x
+vt
) cos +y
sin
c
_
oppure, riordinando i termini,
F(t, x, y) =
_
t
cos
+y
sin
_
(5.1)
dove
=
_
1
v
c
cos
_
=
_
1
v n
c
_
(5.2)
c
= c v cos = c v n (5.3)
c
cos =
cos
c
sin =
sin
(5.4)
Un semplice argomento mostra che la fase `e invariante (v. appendice) cosicche F(t, x, y)
nella (5.1) `e anche la fase in F
. Questo signica semplicemente che
, c
sono
rispettivamente la frequenza, la velocit`a di fase e la direzione dellonda in F
. Dalle (5.4)
si ottiene subito =
, e per la lunghezza donda si ha (diversamente che dal caso
relativistico)
1/
/c
= /c = 1/ (5.5)
Introducendo il numero donde, k = (2/)n, le (5.4) si compendiano nellequazione k
=
k. Apparentemente, dunque, la teoria non predice aberrazione per la luce. Ritorneremo
sulla questione in seguito.
La (5.3) determina la velocit`a di fase nel sistema F
, mentre la (5.2) mostra come si
trasforma la frequenza; entrambe dipendono dalla velocit` a assoluta di F
, che pu`o quin-
di essere determinata, in linea di principio, compiendo esperimenti ottici in F
. Una
15
precisazione necessaria `e che la velocit`a dei segnali elettromagnetici misurata in questi
esperimenti non `e la velocit`a di fase, che `e inosservabile, ma la velocit`a di gruppo.
E11. La luce proveniente dalla galassia di Andromenda (M31) ha uno spostamento verso
il blu (parte alta dello spettro) di una parte su 3000, cio`e / 0, 00033. Con quale ve-
locit`a radiale si sta muovendo Andromeda rispetto a noi? E si avvicina o si allontana? Un
gamma ray burst recentemente osservato, il GRB090423, ha uno spostamento relativo
verso il rosso pari a 8, cio`e la frequenza ricevuta `e 1/9 di quella emessa. Se interpretiamo
lo spostamento come eetto Doppler con che velocit`a si allontana?
1.5.2 la velocit`a di gruppo
La velocit`a di gruppo compare quando si ha a che fare con pacchetti donde, sovrapposi-
zioni lineari di onde elettromagnetiche piane con vettori donda e frequenze leggermente
diversi da un certo vettore donda medio. Si pu`o determinare la velocit`a di gruppo con la
nota formula
6
u =
k
= 2
dove k = 2
1
n e le derivate sono calcolate nel vettore donda medio. Usando la (5.2)
e k
= k, si ottiene subito il teorema di addizione
u
= u v u = |u| = c (5.6)
che `e identico al teorema di addizione delle velocit`a per le particelle di materia. Ponendo
u
= u
, si ottiene il modulo in funzione della direzione
u
= v e
+ {(v e
)
2
+c
2
v
2
}
1/2
(5.7)
Dalla (5.6) si ha u
v = u v e u
v = u v v
2
, ovvero
7
u
sin
= u sin, u
cos
= u cos v (5.8)
da cui la formula
tan
=
sin
cos v/c
(5.9)
Vediamo dunque che la frequenza, la velocit`a di fase e la velocit`a di gruppo della radiazione
elettromagnetica dipendono dalla velocit`a degli osservatori rispetto al sistema assoluto. La
direzione di propagazione e la lunghezza donda, invece, rimangono invariate. Vale inoltre
per la luce lo stesso teorema di addizione delle velocit`a che vale per le particelle di materia.
In particolare le formule (5.9) e (4.3) sono identiche, con le opportune identicazioni (i.e.
u al posto di c).
E12: Si usi la formula (5.9) per determinare langolo di incidenza della pioggia vista dal
nestrino di un treno in corsa, con unassunzione ragionevole sul valore di . Cosa sono
in questo caso v e c? Conviene assumere che v/c 1?
E13: Per la luce stellare osservata dalla terra `e probabile che v/c 1; dalla (5.9) si
ottenga una formula per
, valida al primo ordine in v/c.
6
Unabbreviazione per u
x
= /k
x
, etc.
7
Ricordarsi che |a b| = ab sin e a b = ab cos .
16
1.5.3 La velocit`a della luce nei dielettrici trasparenti
In un dielettrico trasparente fermo nel sistema assoluto, la velocit`a della luce `e c/n, dove
n > 1 `e lindice di rifrazione. Se per`o il dielettrico si muove rispetto alletere, la velocit`a
di fase e la velocit`a di gruppo sono in generale diverse da c/n, sia rispetto al dielettrico
che rispetto al sistema assoluto.
Questo pose un problema che provoc`o molto dibattito tra gli scienziati ottocenteschi, in
parte perche la risposta dipende in modo essenziale dalle assunzioni che si possono fare
sul comportamento delletere in un mezzo in movimento.
Una semplice ipotesi era che linterazione fra etere e materia fosse estremamente debole, se
non nulla, e che letere passasse dunque indisturbato attraverso la materia. Unaltra, forse
pi` u ragionevole, era che il trascinamento fosse solo parziale (teoria di Fresnel). Conviene
allora trattare tutti i casi simultaneamente e assumere che la velocit`a delletere rispetto
al sistema assoluto F sia
w = fv, 0 f 1
essendo v la velocit`a assoluta del mezzo, misurata in F. Il parametro f si chiama
coeciente di trascinamento di Fresnel, secondo il quale poi
f = 1
1
n
2
espressione che egli deriv`o dalla sua teoria elastica delletere. Il caso f = 1 era quello
che preferiva Stokes. Si noti per`o che f dipende dalla frequenza della luce, cosicche il
trascinamento delletere dipenderebbe anche dal suo colore.
Nel sistema F
f
che si muove con velocit`a fv rispetto a F, letere `e immobile e la velocit`a
di fase `e c/n. Per la velocit`a di fase in F avremo quindi (dalleq. (5.3))
c
0
=
c
n
+fv n (5.10)
e per la velocit`a di gruppo (teorema di addizione)
u = u
f
+fv |u
f
| =
c
n
(5.11)
dove u
f
`e la velocit`a di gruppo in F
f
. Da qui si ricava
u = fv e +
_
(fv e)
2
+
c
2
n
2
f
2
v
2
_
1/2
(5.12)
dove e denota il versore della direzione di propagazione della luce, misurato in F. La
velocit`a di F
rispetto a F
f
`e (1 f)v, e dunque la velocit`a di fase in F
`e
c
=
c
n
(1 f)v n =
c
n
v n
n
2
(5.13)
La seconda eguaglianza vale se f ha il valore di Fresnel. Per la velocit`a di gruppo avremo,
analogamente,
u
= u
f
v
n
2
(5.14)
17
Le equazioni (5.11) e (5.14) riconfermano il teorema di addizione
u = u
+v (5.15)
Detto e
il versore di propagazione in F
, dalla (5.14) si ricava inne
u
=
1
n
2
v e
+
_
n
4
(v e
)
2
+
c
2
n
2
v
2
n
4
_
1/2
(5.16)
Le formule (5.10), (5.12), (5.13), (5.15) e (5.16) risolvono il problema posto. Applicazioni
agli esperimenti saranno discusse pi` u avanti. Al primo ordine nel parametro piccolo v/c
si ottengono le formule utili
u =
c
n
+
_
1
1
n
2
_
v e (5.17)
u
=
c
n
v e
n
2
(5.18)
E14: Un raggio di luce si propaga allinterno di un tubo di acqua corrente, nel verso della
medesima. La velocit`a della corrente rispetto al sistema assoluto sia v: quanto vale la
velocit`a della luce nel sistema assoluto? E nel sistema F
dove lacqua `e in quiete? E se
il verso di propagazione `e opposto alla corrente? Se `e ortogonale?
1.5.4 Laberrazione e leetto Doppler
La formula (5.9)
tan
=
sin
cos v/c
(5.19)
connette la direzione di un raggio di luce misurata in un laboratorio terrestre F
, con la
sua direzione assoluta (che in generale non si conosce).
La formula (5.2) connette invece la frequenza in F
con la frequenza assoluta (che pure,
in generale, non `e nota). In entrambi i casi per`o, le formule predicono eetti osservabili
di grande rilevanza pratica e concettuale.
Aberrazione stellare
Se la luce proviene da una stella lontana e se ci`o che interessa `e leetto di aberrazione
al primo ordine in v/c, allora si pu`o supporre che la stella sia in quiete rispetto alletere.
La direzione assoluta della stella `e allora = e la direzione relativa (o apparente)
`e
. La (5.19) diventa la formula dellaberrazione stellare, dove, espandendo in
serie al primo ordine in v/c, si ha
tan
=
sin
cos +v/c
tan
v
c
tan
cos
(5.20)
18
Ponendo =
1 radianti (angolo di aberrazione) si ottiene, con buona
approssimazione,
=
v
c
sin
in accordo con le prime osservazioni di Bradley (1727), e successive. Ora la velocit`a
della terra varia nel corso dellanno, cio`e
dipende dal tempo, e dunque laberrazione `e
osservabile e si manifesta come un moto annuale apparente delle stelle lungo piccole ellissi
di estensione angolare v sin
/c (per una stella allo zenit si tratta di circa 41
), dovuto
alla rivoluzione della terra intorno al sole. Si noti che laberrazione stellare non dipende
dalla distanza delle stelle (a dierenza della parallasse, che pure `e dovuta alla rivoluzione
terrestre) e che lo spostamento angolare della stella `e nella direzione del moto della terra,
come avviene per la direzione della pioggia vista attraverso il nestrino di un treno in
corsa.
Limportanza dellaberrazione per la relativit`a `e dovuta al fatto che langolo di aberra-
zione non cambia se il telescopio `e riempito dacqua (Airy, 1871-73), mentre nella teoria
delletere secondo Lorentz questo `e vero solamente al primo ordine in v/c (a causa del
drift). In eetti il percorso della luce fra due punti dati `e determinato dal principio di
Fermat, secondo il quale lintegrale curvilineo sui cammini (p, q) da p a q
T(p, q) =
_
(p,q)
d
u
, u
=
c
n
v e
n
2
assume un valore minimo sul cammino eettivamente percorso dalla luce. La velocit`a u
`e quella ricavata dalla (5.18), e si vede che dipende esplicitamente dalla direzione e dalla
velocit`a assoluta della terra. Dal punto di vista della teoria della relativit`a, u
= c/n
e le osservazioni di Airy sono la semplice conseguenza del fatto che un raggio incidente
normalmente sulla supercie di separazione di due dielettrici diversi non subisce rifrazione.
eetto Doppler
Lequazione (5.2) delleetto Doppler
=
_
1
v n
c
_
non pu`o essere sperimentalmente vericata se non si conosce la frequenza assoluta ; quello
che si pu`o fare `e allora calcolare il rapporto,
o
/
1
, della frequenza di una sorgente avente
velocit`a assoluta v
o
con la frequenza rivelata da un detector avente velocit`a assoluta v
1
,
cos da eliminare la frequenza incognita . Si ottiene
1
1 =
1 v
o
n/c
1 v
1
n/c
1 =
(v
1
v
o
) n
c
+
(v
1
n)(v
1
v
o
) n
c
2
+ (5.21)
Si vede che al primo ordine in v/c questo rapporto dipende solo dalla velocit`a relativa v
r
=
v
o
v
1
, in accordo con la teoria della relativit` a e con le osservazioni. Ma i termini successivi
dello sviluppo in serie dipendono dalle velocit`a assolute, che sono quindi misurabili in linea
di principio. Storicamente, le prime osservazioni di precisione furono eseguite da Ives e
Stilwell (nel 1938, ma ad angolo zero) e non confermano la (5.21), ma la formula fornita
dalla teoria della relativit`a. Ironicamente, sembra che il reale intento dei due sici fosse
quello di screditare la teoria della relativit`a.
19
1.6 Esperienze di ne secolo XIX
In base alle formule trovate, `e possibile misurare la velocit`a della terra rispetto alletere
se si riesce a misurare u
in un laboratorio terrestre. Dei vari esperimenti di interferenza
progettati discuteremo brevemente e schematicamente quelli storici di Hoek, Fizeau e di
Michelson e Morley (MM), nonche gli eetti di aberrazione e lo spostamento Doppler
delle frequenze. I primi due non avevano la sensibilit`a necessaria per misurare i termini
quadratici in v/c (che `e di ordine 10
4
per un esperimento terrestre), per cui `e suciente
approssimare le (5.12) e (5.16) al primo ordine in v/c. Si ottengono facilmente le formule
(5.17) e (5.18), che riscriviamo per comodit`a
u =
c
n
+
_
1
1
n
2
_
v e
u
=
c
n
v e
n
2
Come vedremo, nella teoria della relativit`a la prima si ricava dalla cinematica relativistica
senza bisogno di introdurre letere (come fu notato da M. von Laue), mentre la seconda
diventa semplicemente u
= c/n.
1.6.1 Hoek
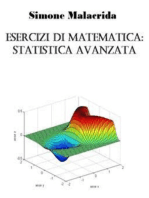
Lesperimento di interferenza di Hoek (1868) `e schematicamente rappresentato in Fig. [1]:
Figura 1.2: Esperimento di Hoek
1
2
T
S
L
F `e una sorgente, T `e linterferometro e il tratto di lunghezza L contiene un dielettrico
trasparente (per esempio acqua) con indice di rifrazione n. Il raggio di luce si divide
in due raggi che percorrono il rettangolo in direzioni opposte e interferiscono in T. Si
suppone che la velocit`a dellapparato rispetto al sistema assoluto sia parallela al braccio
orizzontale dellinterferometro ragurato. Usando la (5.18) per calcolare i tempi T
1
e T
2
richiesti ai raggi per completare il giro dellapparato, `e facile ottenere
T
1
T
2
=
L
c v
L
c +v
+
nL
c +v/n
nL
c v/n
20
Al primo ordine in v/c si ottiene T
1
T
2
= 0, in buon accordo con le osservazioni di Hoek.
Se al posto del valore di f dato da Fresnel avessimo usato f = 0 oppure f = 1 (lipotesi
di Stokes), il risultato sarebbe stato non nullo. Lesperimento elimina dunque questi due
casi e nello stesso tempo verica la teoria di Fresnel. Lesperimento `e anche in accordo
con il punto di vista relativistico, perche se la velocit`a della luce `e c in tutti i riferimenti
inerziali e in ogni direzione (o c/n se `e presente un dielettrico) allora il risultato nullo di
Hoek diventa ovvio.
Si noti comunque che lindice di rifrazione dipende dalla frequenza (per il fenomeno della
dispersione), un fatto che richiederebbe lintroduzione di unetere per ogni colore del-
la luce. Le misure di precisione degli eetti del secondo ordine in v/c hanno comun-
que confermato la teoria della relativit`a, e la teoria di Fresnel `e stata denitivamente
abbandonata.
1.6.2 Fizeau e Fresnel
`
E interessante osservare che la formula di Fresnel fu confermata anche da un esperimento
indipendente dovuto a Hyppolite Fizeau (1851, 1853). Questo esperimento `e schematica-
mente rappresentato nella Fig. [2]: come sopra, F `e una sorgente, T `e linterferometro e
nel tratto di lunghezza L vi `e una forte corrente dacqua con velocit`a v. Il raggio di luce
si divide in due raggi che percorrono il rettangolo in direzioni opposte e interferiscono in
T. Si suppone che la velocit`a dellapparato rispetto al sistema assoluto sia parallela al
braccio orrizontale dellinterferometro. Rispetto alla gura di interferenza ottenuta con
acqua immobile, si ottiene un marcato spostamento delle frange.
Dallesperienza di Hoek sappiamo che il moto dellapparato rispetto alletere non d`a eetti
osservabili al primo ordine in v/c, perci` o possiamo supporre che lapparato sia in quiete nel
sistema assoluto. Possiamo usare in tal caso la (5.12), in cui v `e semplicemente la velocit`a
dellacqua rispetto alletere. Si ottiene, con le notazioni usate sopra, lo spostamento di
fase
F = (T
1
T
2
) =
2Lv
c
2
(n
2
1)
in accordo con le osservazioni di Fizeau.
Lesperimento determina la velocit`a della luce in un dielettrico in movimento, in accordo
con la (5.17), e dunque conferma la teoria di Fresnel se, come sopra, si ignorano i feno-
meni dispersivi. Si noti che lesperimento, con questa interpretazione, pu`o essere usato
per misurare la velocit`a assoluta dellacqua, piuttosto che la velocit`a della terra rispetto
alletere, ma in realt`a esso misura soltanto la velocit`a dellacqua rispetto al laboratorio.
1.6.3 Michelson e Morley
Questo `e il primo esperimento (1887) che misura eetti del secondo ordine in v/c. Lin-
terferometro usato `e schematizzato nella gura
Con la direzione indicata della velocit`a si ricava facilmente, usando la (5.7), il tempo
totale di andata e ritorno dei due raggi lungo i bracci dellinterferometro. Per i raggi uno
e due si ha, rispettivamente (si ricordi lesercizio E4: qui i due nuotatori sono i raggi di
luce e la corrente `e il drift delletere),
T
=
2Lv
c
2
v
2
, T
=
2L
c
2
v
2
21
Figura 1.3: Esperimento di Fizeau
1
2
T
S
L
V
Figura 1.4: Esperimento di Michelson-Morley
T
S
1
2
V
Da qui si deriva la dierenza di fase
F =
2L
c
v
2
c
2
(6.1)
con precisione del secondo ordine in v/c. Lesperimento non ha rilevato spostamenti
signicativi delle frange di interferenza in seguito alla rotatione dellapparato, nonostante
Michelson e Morley fossero in grado di misurare spostamenti molto pi` u piccoli di quello
previsto dallEq. (6.1). Pi` u precisamente, la velocit`a della luce in due direzioni ortogonali
risultava identica entro un margine di 5 Km/sec. In un esperimento del 1964 questo
margine `e stato ridotto a 1 Km/sec e, in tempi pi` u recenti, praticamente a zero (ma
dipende dai punti di vista, v. pi` u avanti).
1.6.4 Interpretazioni
(i) Per salvare la teoria delletere Lorentz e, indipendentemente, Fitzgerald proposero al-
lora che il braccio dellinterferometro parallelo alla velocit`a di traslazione della terra si
22
contraesse rispetto al braccio ortogonale del fattore
_
1 v
2
/c
2
. Con questa ipotesi si
ha ovviamente T
1
= T
2
, e F = 0. Non discutiamo qui i tentativi fatti, specialmente
da Lorentz, per derivare lipotesi della contrazione dalla teoria atomica della materia.
La formula della contrazione `e infatti una semplice conseguenza cinematica delle trasfor-
mazioni di Lorentz, e in quanto tale non richiede ipotesi particolari sulla struttura della
materia. Era opinione di Pauli, tuttavia, che non si dovesse rinunciare del tutto a una
tale spiegazione.
(ii) Unaltra interpretazione del risultato nullo di MM `e di supporre che la velocit`a della
luce sia uguale a c solo rispetto alla sorgente (come per i proiettili). Teorie di questo tipo,
dette emissive, sono per`o in dicolt`a con laberrazione stellare.
1.7 Esperienze moderne
A parte lesperimento del 64 (T. S. Jaseja et al., Phys. Rev. 133, A1221 (1964)), la
versione moderna dellesperimento di MM usa frequenze di risonanza in cavit`a ottiche
criogeniche. Le frequenze di risonanza sono della forma
cav
= nc/L, dove L `e la lun-
ghezza della cavit`a risonante e n = 1, 2, 3, . . . . Dunque una violazione dellisotropia di
c, per esempio, pu`o essere rivelata ruotando la cavit`a e misurando lo spostamento delle
frequenze. In questo modo si `e stabilito il bound pi` u preciso oggi noto
8
c
c
< 10
15
dove
c
/c = 1 + (
1
2
+ )(v/c)
2
sin
2
+ ( 1)(v/c)
2
parametrizza la dipendenza della velocit`a della luce dallangolo tra la direzione di pro-
pagazione e la velocit`a dellapparato rispetto al sistema assoluto (preferred ether frame),
nello schema di Mansouri-Sexl
9
. In esperimenti recenti di Hills e Hall e Lipa et al.
10
i
parametri + 1/2, 1/2, risultano nulli a meno di una parte in 10
9
!
8
H. M uller, S. Herrmann, C. Braxmaier, S. Schiller and A. Peters, Phys. Rev. Lett. 91, 020401 (2003).
9
R. M. Mansouri and R. U. Sexl, Gen. Rel. Grav. 8, 515 (1977).
10
D. H. Hills and J. H. Hall, Phys. Rev. Lett. 64, 1697 (1990); J. A. Lipa, J. A. Nissen, S. Wang, D.
A. Stricker, and D. Avalo, Phys. Rev. Lett. 90, 060403 (2003).
23
Capitolo 2
Fondamenti di relativit`a speciale
Il persistente fallimento dei tentativi di rilevare una qualsiasi inuenza del moto della
terra sulla propagazione della luce
1
`e ovviamente incompatibile con lesistenza di un etere
imponderabile e conduce alla conclusione altamente probabile, se non certa (W. Pauli),
che tutte le leggi della sica, inclusa lelettrodinamica, obbediscano a un principio di
relativit`a.
2.1 Assiomi di Einstein
Fu A. Einstein che introdusse questo punto di vista relativistico moderno come il primo di
due assiomi, il secondo dei quali, solo apparentemente incompatibile con il primo, sta-
bilisce anche che la velocit`a della luce sia la stessa in tutti i sistemi di riferimento inerziali.
A questo proposito, si pu`o osservare che le equazioni di Maxwell predicono che la velocit`a
della radiazione elettromagnetica nel vuoto sia indipendente dal moto macroscopico della
sorgente, e lesperimento di Michelson e Morley `e compatibile con questo fatto con una
precisione del secondo ordine in v/c. Lastronomo de Sitter ha osservato che lassenza di
immagini stellari multiple nei sistemi binari `e unelegante conferma di questo fatto.
Tuttavia essa potrebbe ancora dipendere da termini di ordine superiore in v/c.
`
E molto
pi` u semplice assumere, con Einstein, che la velocit`a della luce nel vuoto sia del tutto
indipendente dal moto della sorgente e dellosservatore.
`
E interessante citare direttamente Einstein
2
P1 Le leggi secondo le quali si modicano gli stati dei sistemi sici sono
indipendenti dal fatto che questi cambiamenti di stato vengano riferiti alluno
o allaltro di due sistemi di coordinate che si trovino in relativa reciproca
traslazione uniforme.
P2 ogni raggio di luce si muove nel sistema di coordinate in quiete con
la determinata velocit`a V , indipendente dal fatto che quel raggio di luce sia
emesso da una sorgente in quiete, o da una sorgente in movimento (al giorno
doggi la V di Einstein si indica con c).
1
Si ricordi che la precisione delle misure era del secondo ordine in v/c.
2
La traduzione `e di P. Straneo, per il volume Cinquantanni di Relativit`a, Ed. Giustine e Sansoni,
Firenze, 1955. Si veda anche la collezione di articoli in [2].
24
Da P1, nel sistema mobile in cui la sorgente `e ferma la velocit`a `e ancora c, cosicche si
potrebbe enunciare P2 nella versione equivalente
P3 la velocit`a della luce nel vuoto ha lo stesso valore in tutti i sistemi di
riferimento inerziali, in ogni direzione, tempo e luogo.
2.1.1 Osservazioni sui postulati
(i) Il principio di relativit`a P1 da solo non `e suciente a determinare un gruppo univoco
di trasformazioni delle coordinate spazio-temporali. Infatti la meccanica newtoniana `e
covariante rispetto al gruppo di Galilei, mentre la meccanica relativistica lo `e rispetto al
gruppo di Lorentz.
Come ha mostrato Einstein per`o, gli assiomi P1 e P2 (o P3) sono sucienti a determinare
il gruppo di simmetria senza bisogno di assumere valida in tutti i sistemi inerziali lintera
teoria elettromagnetica di Maxwell, una semplicazione, questa, assai ragguardevole. Le
equazioni della meccanica invece, invarianti galileiane, dovranno essere riformulate in
modo tale da renderle compatibili con la nuova simmetria. La meccanica relativistica che
ne risulta dierisce molto poco da quella newtoniana
3
ma `e indispensabile, per esempio,
a trattare le particelle veloci che viaggiano nei moderni acceleratori di particelle e alcuni
fenomeni di astrosica relativistica, e ha collezionato numerose veriche sperimentali.
(ii) Il carattere non ovvio del primo postulato, cio`e del principio di relativit`a, si pu`o
apprezzare considerando il fatto che, in base ad esso, il moto uniforme del centro di
massa delluniverso rispetto a un sistema qualunque non dovrebbe produrvi alcun eetto
osservabile. Evidentemente nessuno `e in grado di vericare una simile asserzione e dunque,
se non vogliamo introdurre argomenti metasici nella meccanica, il principio di relativit`a
ha un preciso signicato sico solo per i sistemi isolati.
Il problema `e quando si pu`o dire che un sistema `e isolato. Lesperienza mostra che per il
moto uniforme `e suciente assumere che tutte le masse siano sucientemente distanti, ma
che non pu`o dirsi altrettanto per il moto accelerato. Nei sistemi accelerati appaiono infatti
campi di forza apparentemente privi di cause
4
, e che per tale motivo Newton ricondusse
agli eetti dellaccelerazione assoluta, riferita cio`e allo spazio assoluto.
`
E assai probabile
che i campi inerziali dipendano invece dallaccelerazione rispetto alla massa della terra
e degli altri corpi celesti (espressione usata da Mach), la sola che ha signicato sico,
secondo Mach, e in ogni caso la sola che si pu`o osservare.
(iii) Il ruolo principale dellassioma P2, con il suo riferimento esplicito alla velocit`a della
luce, non `e tanto quello di suggerire un ruolo speciale o privilegiato del campo EM in
natura, quanto quello di stabilire lesistenza di una velocit`a limite insuperabile. Infatti dei
due casi, che una velocit`a limite esista, o che non esista, solo il primo implica la simmetria
di Lorentz. Ma il valore della velocit`a limite, che proprio in virt` u di tale propriet`a deve
essere la stessa in tutti i sistemi di riferimento, non `e ssato da questo argomento. Il
secondo postulato ssa precisamente questo valore, riconducendolo alla velocit`a della luce
nel vuoto.
Nel seguito ci proponiamo di determinare il gruppo di trasformazioni delle coordinate
spaziali e temporale che `e in accordo con questo assioma, e di ripristinare cos quel princi-
pio di relativit`a che nellelettrodinamica di Maxwell-Lorentz sembrava perso.
`
E un punto
3
Le correzioni sono tutte di ordine v
2
/c
2
, che `e indubbiamente il motivo per cui non state scoperte
prima.
4
Quali, e dove, sarebbero le sorgenti?
25
centrale dellanalisi di Einstein che per fare questo `e innanzitutto necessario denire in
maniera precisa come si determinano tali coordinate; si pu` o infatti notare che le equazioni
della sica, quali le equazioni del moto di Newton o le equazioni dierenziali del campo
elettromagnetico, hanno un preciso signicato sico solo se le coordinate stesse sono pre-
cisamente denite. Ci`o si ottiene dando alle coordinate spazio-temporali una denizione
di tipo operazionale, cio`e data in termini di operazioni eseguibili in un laboratorio.
2.1.2 La denizione del tempo
Il problema spinoso `e come confrontare il tempo di eventi che accadono in luoghi diversi.
Il problema sorge perche se le leggi siche sono locali e la velocit`a dei segnali `e limitata, la
denizione del tempo comune a eventi in luoghi diversi necessita di una convenzione per
sincronizzare gli orologi. Ad esempio, per stabilire se due orologi identici separati da una
certa distanza indicano lo stesso tempo, si pu`o inviare un raggio di luce dal primo verso
il secondo e regolare questultimo in base al ritardo dovuto alla velocit`a di propagazione
nita del segnale. Ma questa procedura richiede ovviamente che si conosca il valore della
velocit`a della luce
5
; in altri termini, la velocit`a della luce deve essere nota se vogliamo
sincronizzare gli orologi, benche si richiedano orologi preventivamente sincronizzati per
determinare la velocit`a della luce. Anche il trasporto di un orologio da un punto allaltro
incontra la stessa dicolt`a; per correggere i possibili eetti del trasporto, si deve disporre
di orologi preventivamente sincronizzati. I tempi degli eventi, pertanto, non possono
essere confrontati prima che si sia stabilita una procedura per sincronizzare gli orologi,
ossia prima che si sia stabilito che cosa si intende per tempo comune a eventi distanti.
Secondo il metodo di Einstein, il tempo comune di due eventi A e B pu`o essere denito
quando si stabilisca, per denizione, che il tempo che la luce impiega per viaggiare da
A a B `e uguale al tempo che impiega per tornare da B ad A. Quindi se il raggio parte
allistante t
A
da A, giunge in B allistante t
B
(misurato vicino a B), e ritorna in A
allistante t
A
(misurato vicino ad A), si avr`a lequazione
6
t
A
t
B
= t
B
t
A
(1.1)
Diremo che i due orologi sono sincronizzati se questa relazione `e valida. Con questo si `e
innanzitutto denito un criterio per decidere quando due orologi distanti sono sncroni, ma
non solo. Dalluguaglianza dei tempi di andata e ritorno del segnale si deduce luguaglianza
della velocit`a della luce allandata con la velocit`a della luce al ritorno, cio`e, detta L
AB
la
distanza tra A e B, si ha
c =
L
AB
t
B
t
A
=
L
AB
t
A
t
B
(1.2)
Questo fatto non `e dunque oggetto di verica sperimentale. Con questo si assume per`o
che la velocit`a della luce sia la stessa per tutte le coppie di orologi sincronizzati, un dato
che non segue logicamente dalla denizione di Einstein. Si noti anche che la denizione
di Einstein non dipende dal valore numerico di c.
5
Ricordiamo qui che la velocit` a della luce si pu` o determinare con misure puramente elettromagnetiche.
6
un caso pi` u generale si ha ponendo t
A
t
B
= t
B
t
A
, dove si assume che la partenza del segnale da
B non coincida necessariamente con il suo arrivo da A.
26
Segue anche dalla (1.2) che
c =
2L
AB
t
A
t
A
(1.3)
anche se questa non `e propriamente la denizione cinematica usuale della velocit`a. Tut-
tavia questa `e la velocit`a della luce misurata in esperimenti a l`a Fizeau, e la (1.3) pu`o
considerarsi unacquisizione sperimentale. Si noti che si pu`o usare lequazione (1.2) per
misurare c solo se gli orologi in A e B sono sincronizzati. Dalla (1.2) si vede che se un
segnale elettromagnetico parte da un orologio nel punto A al tempo t
A
, e arriva in B al
tempo t
B
di un orologio sincronizzato con A, si ha
t
B
= t
A
+
L
AB
c
(1.4)
Volendo, si pu`o usare questa relazione per regolare gli orologi, purche si conosca il valore
di c. Per questo la denizione originale di Einstein ci sembra quella logicamente pi` u
semplice.
Se un raggio luminoso segue un percorso poligonale chiuso con lati l
i
, si pu`o misurare il
tempo di volo con un unico orologio; se
c =
l
i
T
(1.5)
allora si pu`o mostrare che un orologio in A `e sincronizzato con orologi identici posti in B
e in C se e solo se questi sono sincronizzati tra loro. Daltronde la (1.5) pu`o considerarsi
unacquisizione sperimentale sin dai tempi di Fizeau, e il metodo di Einstein `e quindi
libero da contraddizioni logiche.
Il tempo comune di eventi distanti `e adesso denito da orologi sincronizzati posti nelle
immediate vicinanze degli eventi, trascurando linesattezza che deriva dal fatto che gli
orologi non coincidono esattamente con gli eventi; in particolare gli eventi A e B si
diranno simultanei (o contemporanei) se gli orologi suddetti indicano lo stesso tempo.
La procedura descritta deve essere applicata a tutti i sistemi di riferimento inerziali, con
gli orologi in quiete nei rispettivi sistemi. Ogni riferimento inerziale avr`a quindi il suo
proprio tempo, denito da orologi sincronizzati che occupano posizioni sse, e in tali
sistemi la velocit`a della luce risulter`a per denizione costante, isotropa e numericamente
uguale a c. Non `e detto, a priori, che questi tempi concordino per tutti gli osservatori
inerziali.
Osservazioni
Sin dallinizio la procedura di sincronizzazione di Einstein `e stata oggetto di analisi teo-
riche dettagliate, perche si riconosce in essa un certo grado di convenzionalit`a. Per gli
interessati, i lavori classici che analizzano questo grado di convenzionalit`a sono dovuti a
Robertson[10] e ai gi`a citati Mansouri e Sexl[11]. Laspetto pi` u interessante dei lavori
di Robertson, Mansouri e Sexl `e lidenticazione dei tre parametri delle trasformazioni
di coordinate che descrivono le varie convenzioni di sincronizzazione degli orologi. Si `e
mostrato cos` che esiste una sincronizzazione che mantiene il carattere assoluto della simul-
taneit`a, ma che tuttavia produce una teoria cinematicamente equivalente alla relativit`a
ristretta. Ovviamente si tratta di una denizione operativa dierente della simultaneit`a.
In particolare, in quella teoria due raggi di luce emessi da eventi contemporanei secondo
la nuova denizione non si incontreranno nel punto di mezzo.
27
2.2 Le trasformazioni di Lorentz
Data la denizione del tempo in un sistema inerziale, passiamo ora a determinare il gruppo
di trasformazioni delle coordinate spazio-temporali che `e in accordo con questa denizione
e con il principio di relativit`a.
2.2.1 Condizioni sulle trasformazioni
`
E conveniente introdurre la notazione x
a
, a {0, 1, 2, 3}, per indicare le coordinate, con
la corrispondenza x
0
= ct, x
1
= x, x
2
= y, x
3
= z. Le trasformazioni richieste devono
avere la propriet`a di conservare i moti uniformi e se assumiano che i sistemi di riferimento
coincidano per t = t
= 0, allora devono essere funzioni lineari delle coordinate, cio`e
funzioni della forma
x
a
=
3
a=0
L
a
b
x
b
(2.1)
Lassioma P2 signica che lequazione di un fronte donda sferico in F, cio`e il cono di
equazione
c
2
(t t
0
)
2
+ (x x
0
)
2
+ (y y
0
)
2
+ (z z
0
)
2
= 0 (2.2)
`e la stessa che per il fronte donda in F
,
c
2
(t
0
)
2
+ (x
0
)
2
+ (y
0
)
2
+ (z
0
)
2
= 0 (2.3)
e il problema `e ora quello di trovare le trasformazioni di coordinate che hanno questa
propriet`a. Ma con trasformazioni lineari, questo `e possibile solo se (v. appendice)
c
2
(t
0
)
2
+ (x
0
)
2
+ (y
0
)
2
+ (z
0
)
2
(2.4)
= (L)
_
c
2
(t t
0
)
2
+ (x x
0
)
2
+ (y y
0
)
2
+ (z z
0
)
2
_
dove (L) `e in generale una funzione della matrice di trasformazione L
a
b
; se L `e una
rotazione, nel senso che L
0
i
= L
i
0
= 0 e L
i
j
`e una matrice 3 3 ortogonale, allora (L) = 1
e, applicando due trasformazioni in successione, si ottiene
(L)(L
) = (LL
) (2.5)
Semplici trasformazioni che lasciano invariante il cono luce sono le traslazioni spazio-
temporali x
b
= x
b
+a
b
, o anche
t
= t +a
0
/c, x
= x +a
le trasformazioni di scala, x
a
= x
a
, > 0, e le trasformazioni ortogonali delle coordinate
spaziali (le familiari rotazioni)
x
i
=
3
j=1
R
i
j
x
j
, t
= t
Le due ultime trasformazioni sono lineari e omogenee, ma non cambiano la velocit`a re-
lativa dei sistemi di riferimento. Le simmetrie di rotazione e traslazione corrispondono
28
allisotropia e omogeneit`a dello spazio, e sono associate a importanti leggi di conserva-
zione, sperimentalmente vericate. Le trasformazioni di scala (o dilatazioni), invece, non
rappresentano simmetrie delle leggi siche note, e non verranno ulteriormente considera-
te
7
. Per le trasformazioni L(v) che cambiano solamente la velocit`a relativa scriveremo
(v) al posto di (L(v)).
2.2.2 Trasformazioni speciali, o boosts
Consideriamo il caso semplice di due riferimenti in moto relativo uniforme lungo lasse
comune x, e coincidenti nellistante iniziale t = t
= 0. Usando la seguente propriet`a delle
funzioni iperboliche,
(cosh )
2
(sinh )
2
= 1
si verica subito che con (v) = 1, la condizione di invarianza (2.4) `e soddisfatta da una
rotazione iperbolica del tipo (v = (v, 0, 0))
x
= xcosh ct sinh (2.6)
y
= y z
= z (2.7)
ct
= xsinh ct cosh (2.8)
dove v `e la velocit`a relativa. La (2.7) segue dallassunzione che un moto lungo x in F sia
trasformato in un moto lungo x
in F
. Per determinare osserviamo che il punto x
= 0,
cio`e lorigine di F
, deve muoversi di moto uniforme con velocit`a v; questo determina
tanh =
v
c
(2.9)
Il parametro propriamente denota la rapidit` a della trasformazione, dato che
per v c. Si noti anche lanalogia formale con le rotazioni. Siccome
cosh
2
=
1
1 tanh
2
si ha poi
cosh =
1
_
1 v
2
/c
2
, sinh =
v
_
1 v
2
/c
2
A questo punto, le trasformazioni di Lorentz speciali (`e questo il loro nome) prendono la
forma
x
=
x vt
_
1 v
2
/c
2
(2.10)
y
= y z
= z (2.11)
7
Occorre precisare che le dilatazioni non modicano le masse o le costanti di accoppiamento delle
interazioni, e quindi linvarianza di scala `e possibile solo se tutte le masse sono nulle o se formano uno
spettro continuo, e le costanti di accoppiamento sono adimensionali.
29
t
=
t vx/c
2
_
1 v
2
/c
2
(2.12)
Il fattore gamma
=
1
_
1 v
2
/c
2
(2.13)
`e onnipresente in relativit`a; se, per esempio, v/c = 0,
2n
..
99999... allora 10
n
. La matrice
corrispondente
8
`e
L(v) =
_
_
_
_
v 0 0
v 0 0
0 0 1 0
0 0 0 1
_
_
_
_
(2.14)
Ponendo momentaneamente (v), per indicare la dipendenza da v, `e facile vericare
lidentit`a
(v)(v
)
_
1 +
vv
c
2
_
= (w) (2.15)
dove
w =
v +v
1 +vv
/c
2
(2.16)
Questo signica che il prodotto di due trasformazioni di Lorentz collineari con velocit`a
v e v
`e una trasformazione di Lorentz con velocit`a w, cio`e che L(v) L(v
) = L(w). A
questo punto, avendo eliminato le dilatazioni, possiamo mostrare che non ci sono altri
fattori (v), oltre a (v) = 1. Infatti, la (2.5) diventa, in questo caso, se anche v
`e
diretta secondo lasse x,
(v)(v
) = (w)
e dato che (0) = 1, si deve avere (v)(v) = 1. Sia R
una rotazione che inverte
v = v x: R
v = v. Allora
(v) = (R
v) = (R
)(v) = (v)
In conclusione si ha (v) = 1. Le formule inverse sono
x =
x
+vt
_
1 v
2
/c
2
(2.17)
y = y
z = z
(2.18)
t =
t
+vx
/c
2
_
1 v
2
/c
2
(2.19)
30
Figura 2.1: Sistemi in moto relativo uniforme
y
z z
y
x
x
v
Si noti che le trasformazioni di Lorentz si riducono a quelle di Galilei nel limite c .
Qui vediamo chiaramente la relativit`a della contemporaneit`a: in base a queste equazioni,
per due eventi simultanei (t
= 0) separati spazialmente (x
= 0) in F
, si ha
t =
v
c
2
x (2.20)
in F. Come anche nella simmetria galileiana, la coincidenza spaziale di eventi separati nel
tempo `e relativa. Ma diversamente che dal caso galileiano, `e relativa anche la coincidenza
temporale di eventi separati nello spazio. In relativit`a ristretta, solo alla coincidenza
spazio-temporale si pu`o attribuire un carattere assoluto (cio`e indipendente dal sistema di
coordinate).
Le trasformazioni di Lorentz speciali si possono scrivere in forma vettoriale
t
= (t v x/c
2
), =
1
_
1 v
2
/c
2
(2.21)
x
= x + ( 1)
x v
v
2
v vt (2.22)
e valgono anche se la velocit`a relativa non `e diretta lungo un asse cartesiano. Dato che le
formule dipendono solamente da v, si pu`o pensare che deniscano una trasformazione di
Lorentz pura, senza rotazione. Se i riferimenti F e F
sono connessi da una rotazione R,
come nella (3.3), allora nellEq. (2.22) occorre sostituire
3
j=1
R
ij
x
j
al posto di x
j
.
2.2.3 La pi` u generale trasformazione di Lorentz
Allo scopo di descrivere trasformazioni pi` u generali, introduciamo la matrice diagonale
9
ab
=
_
_
_
_
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
_
_
_
_
8
La numerazione di righe e colonne `e nellordine 0, 1, 2, 3, ma certi autori usano invece 1, 2, 3, 0.
9
Quanto segue `e un piccola anticipazione del formalismo quadri-dimensionale.
31
Si pu`o scrivere il primo membro della (2.2) nella forma
Ds
2
=
3
a=0
ab
x
a
x
b
, x
a
= x
a
x
a
0
(2.23)
Linsieme di tutti gli eventi forma lo spazio-tempo di Minkowski
10
o, pi` u semplicemente,
lo spazio-tempo. Possiamo pensare alle coordinate x
a
e x
a
0
come alle componenti di vettori
nello spazio-tempo i cui punti rappresentano eventi. Lespressione (2.23) denisce lin-
tervallo spazio-temporale tra gli eventi, invariante di Lorentz. La formula (2.23) denisce
anche un prodotto scalare con metrica
ab
, cio`e la forma quadratica
(x, y) =
3
a=0
ab
x
a
y
b
(2.24)
`e evidentemente bilineare e non degenere
11
. Ma si noti che non `e denita positiva. La
condizione di invarianza dellintervallo prende la forma
3
c,d=0
L
c
a
L
d
b
cd
=
ab
(2.25)
e identica le trasformazioni di Lorentz come il gruppo delle isometrie della metrica
ab
.
Si osservi che dalla (2.25) segue anche linvarianza del prodotto scalare
(x, y) = x
0
y
0
+x
1
y
1
+x
2
y
2
+ x
3
y
3
(2.26)
per ogni coppia di punti x, y.
Consideriamo una trasformazione di Lorentz generica
x
a
=
3
a=0
L
a
b
x
b
e applichiamola al vettore e
a
= (1, 0, 0, 0), tale che (e, e) = 1 Si otterr`a un vettore della
forma
L e = (x, x)
dove x
2
+ |x|
2
= 1 perche le trasformazioni di Lorentz preservano il prodotto scalare.
Sia R una rotazione che riporta il vettore ottenuto lungo lasse x,
R L e = (x, |x|, 0, 0)
Siccome |x| < x, ponendo u = c|x|/x e applicando il boost L(u) si trova
L(u) R L e = (1, 0, 0, 0) = e
e segue da questo che L(u) R L R
`e una rotazione spaziale. Ma allora
L = R
1
L(u) R
(2.27)
Vediamo da qui che la pi` u generale trasformazione di Lorentz propria (det L = 1) e
ortocrona (L
0
0
1) `e un prodotto di rotazioni con trasformazioni di Lorentz speciali.
E15: Perche una trasformazione di Lorentz che preserva e deve essere una rotazione?
10
Hermann Minkowski (1864-1909), a cui si deve la formulazione quadri-dimensionale della teoria della
relativit` a.
11
(x, y) = 0 per ogni y se e solo se x = 0.
32
2.3 Lunghezze e intervalli di tempo
Dalle trasformazioni di Lorentz (2.10), ((2.11)), ((2.12)), si ricava che un regolo (asta rigi-
da) in moto con velocit`a v in un riferimento F, avente lunghezza propria L
0
(la lunghezza
nel riferimento F
nel quale il regolo `e in quiete), ha lunghezza
L = L
0
_
1
v
2
c
2
(3.1)
se misurata inF. Il risultato dipende dalle trasformazioni di Lorentz e dal fatto che la
misura di L richiede che le posizioni degli estremi del regolo siano determinate simultanea-
mente in F. Allora dalla prima delle (2.10) segue che per eventi simultanei in F (t = 0)
si ha L
0
= x
= x = L. Si pu`o anche calcolare direttamente x: in questo caso
x = (x
vt
)
Ma eventi simultanei in F non lo sono in F
, e infatti si ha
t
=
v
c
2
x
Eliminando t
si riottiene la (3.1). Vediamo che la formula della contrazione dipende solo
dalla simmetria di Lorentz e non richiede alcuna ipotesi sulla struttura della materia. Essa
si deve considerare come una propriet`a elementare del gruppo di Lorentz non deducibile
da concetti pi` u elementari.
Per le applicazioni `e necessario estendere la formula della contrazione ai moti accelerati,
ma per questo serve la seguente assunzione addizionale: la lunghezza di un elemento d
di lunghezza `e connesso allelemento di lunghezza proprio d
0
, misurato nel SI momen-
taneamente in quiete col regolo, dalla formula (3.1): d =
_
1 v
2
/c
2
d
0
. Dunque, per
esempio, dal punto di vista dellequipaggio di unastronave che viaggia dalla terra verso
Vega (a 26 anni luce) in linea retta, con velocit`a v(x) misurata in anni-luce/anno, la
distanza percorsa sar`a
L (anni luce) =
_
26
0
_
1 v(x)
2
dx
Se il moto `e iperbolico (v. pi` u avanti) si ha
_
1 v(x)
2
= (1 + gx)
1
, dove g `e laccele-
razione misurata
12
in anni-luce/anni
2
E16: Si calcoli la distanza per raggiungere Vega se g `e laccelerazione di gravit`a terrestre,
circa 9, 8 m/s
2
.
E17: Si mostri che la lunghezza di un regolo mobile posto di traverso alla direzione del
moto `e data dalla formula
L =
L
0
1
_
1
2
sin
2
dove `e langolo del regolo con la direzione del moto.
12
Per esempio, se g = 980 cm/sec
2
`e la gravit`a terrestre si ha g = 1, 028 anni luce/anni
2
.
33
Lassunzione fatta poggia la ragione sul fatto che `e sempre possibile, in linea di principio,
correggere gli eetti dellaccelerazione sui regoli, e nessun esperimento noto la contrad-
dice. Naturalmente, accelerazioni troppo elevate non possono essere applicate a oggetti
macroscopici per ragioni strutturali.
Simili considerazioni si possono fare riguardo al comportamento di orologi in movimento.
In tal caso lintervallo di tempo proprio (il tempo indicato dallorologio nel suo sistema
di quiete) `e connesso allintervallo T misurato in F dalla formula
= T
_
1
v
2
c
2
(3.2)
dove v `e la velocit`a dellorologio in F. Infatti, dalla seconda delle (2.12), segue che per
eventi spazialmente coincidenti in F
(le posizioni successive delle lancette dellorologio
fermo in F
), si ha T = T
. Si vede da qui che lorologio in movimento ritarda
rispetto agli orologi in quiete.
Come per i regoli, anche per gli orologi faremo lassunzione extra che gli eetti dellacce-
lerazione si possano correggere. Il tempo proprio di un orologio in movimento lungo una
curva arbitraria si calcola allora con lintegrale
=
_
T
0
_
1 v(t)
2
/c
2
dt (3.3)
I limiti di integrazione si possono ovviamente cambiare. Per esempio, nel moto iperbolico
si ha
v(t) =
gt
_
1 +g
2
t
2
/c
2
E17: Si calcoli il per raggiungere Vega se g `e laccelerazione di gravit`a terrestre, circa
9, 8 m/s
2
. Che valore si deve prendere per T?
Nota- Non discutiamo qui le veriche sperimentali della formula importante (3.2), in
quanto le innumerevoli veriche sperimentali dellinvarianza di Lorentz oggi disponibili
sono anche una verica della dilatazione temporale e della contrazione delle lunghezze (che,
peraltro, non `e mai stata osservata direttamente, cio`e mediante regoli in moto). Tuttavia
la (3.2) ha unapplicazione immediata alla vita media delle particelle elementari instabili:
la vita media di particelle veloci si allunga del fattore . Per questo i muoni prodotti
negli strati alti dellatmosfera dallurto con i raggi cosmici arrivano a terra nonostante la
breve vita media di circa 2, 2 s. La formula relativistica `e stata confermata osservando
il decadimento di muoni ultra-relativistici, aventi 30 (con che velocit`a si spostano i
muoni con tale ?), negli anelli di accumulazione del CERN, con precisione di livello 10
3
.
2.4 Laddizione delle velocit`a
La traiettoria di una particella in moto `e descritta in F dalla funzione vettoriale x(t), e
in F
da x
(t
). Dalle trasformazioni di Lorentz si ricava facilmente
u
x
=
u
x
v
1 u
x
v/c
2
, u
y
=
u
y
_
1
v
2
c
2
1 u
x
v/c
2
, u
z
=
u
z
_
1
v
2
c
2
1 u
x
v/c
2
(4.1)
34
In forma vettoriale
u
=
u + ( 1)(u v)v/v
2
v
(1 u v/c
2
)
(4.2)
u =
u
+ ( 1)(u
v)v/v
2
+ v
(1 +u
v/c
2
)
(4.3)
Orientiamo lasse z in modo tale che u
z
= 0. Allora anche u
z
= 0 e dalla (4.1) segue
tan
=
sin
_
1 v
2
/c
2
cos v/u
(4.4)
Dalla (4.2) si trova
u
= u
_
1 2
v
u
cos +
v
2
u
2
v
2
c
2
sin
2
_
1/2
_
1
uv
c
2
cos
_
1
dove `e langolo fra u e v. Introducendo il versore e nella direzione di u, e risolvendo
rispetto ad u, si ottiene la formula
u =
v e(1 u
2
/c
2
) +
_
1 v
2
/u
2
+ (1 u
2
/c
2
)(v e)
2
/u
1/2
u
_
1 v
2
/c
2
1 v
2
/c
2
+ (1 u
2
/c
2
)(v e/c)
2
(4.5)
Si noti che u = c se e solo se u
= c, indipendentemente dalla direzione del moto.
Presentano interesse le formule di trasformazione dellaccelerazione nel caso che F
sia
un sistema momentaneamente in quiete con la particella; dierenziando le (4.1) nelle
componenti della velocit`a e ponendo successivamente u
x
= u
y
= u
z
= 0 e v = u, si
ottengono facilmente le formule volute
a
x
= (1
2
)
3/2
a
x
, a
y
= (1
2
)a
y
, a
z
= (1
2
)a
z
(4.6)
dove = v/c, a
x
= du
x
/dt, a
x
= du
x
/dt
, eccetera. In forma vettoriale
a = (1
2
)a
+ (1
2
)
_
_
1
2
1
_
a
v
v
2
v (4.7)
2.5 La luce nei dielettrici trasparenti
Usando le formule di trasformazione di Lorentz e la costanza di c nella condizione di inva-
rianza della fase di un onda elettromagnetica piana, si trovano le formule di trasformazione
delle caratteristiche dellonda valide nella teoria della relativit`a
=
1 v cos /c
_
1 v
2
/c
2
,
cos
=
cos v/c
_
1 v
2
/c
2
,
sin
= sin (5.1)
dove e
danno la direzione della normale allonda in F e F
rispettivamente. Si vede
che
tan
=
sin
_
1 v
2
/c
2
cos v/c
(5.2)
35
Questa formula `e identica alla (4.4), dove si ponga u = c; cio`e la direzione dei raggi di
luce si trasforma nello stesso modo della normale ai fronti donda, diversamente che nella
teoria delletere.
Se si introduce il vettore numero donde, k = (2/c)n, e si pone k
0
= 2/c, le formule
scritte indicano che le quattro grandezze (k
0
, k
x
, k
y
, k
z
) si trasformano come le componenti
del vettore posizione di un evento, (x
0
, x, y, z), dove si `e posto x
0
= ct. Infatti si pu`o
scrivere la fase dellonda nella forma
F = k
0
x
0
+k
x
x +k
y
y +k
z
z
da cui discende subito che F sar`a invariante precisamente se le componenti k
0
e k si
trasformano come le componenti del vettore posizione x
0
, x.
La velocit`a di gruppo, u, segue dalle formule scritte se si rammenta che
u =
k
= 2
Con un calcoletto un p`o pi` u lungo che nel caso non relativistico, si ottiene
u
x
=
u
x
v
1 u
x
v/c
2
, u
y
=
u
y
_
1 v
2
/c
2
1 u
x
v/c
2
, u
z
=
u
z
_
1 v
2
/c
2
1 u
x
v/c
2
cio`e la stessa legge di composizione delle velocit`a che `e valida per le particelle di massa
nita. Per un mezzo trasparente in quiete in F
con indice di rifrazione n, la velocit`a
della luce in F `e data dalla formula (4.5) con u
= c/n, cio`e
u =
v e(1 1/n
2
) +
_
1 v
2
/c
2
[1 n
2
v
2
/c
2
+ (1 1/n
2
)(v e)
2
n
2
/c
2
]
1/2
c/n
1 v
2
/c
2
+ (1 1/n
2
)(v e/c)
2
Al primo ordine in v/c si ritrova la formula di Fresnel (5.17)
u =
c
n
+
_
1
1
n
2
_
v e
qui ottenuta senza fare ricorso allipotesi delletere.
2.5.1 Eetto Doppler e aberrazione secondo la relativit`a
Leetto Doppler `e contenuto nella (5.1): se la sorgente `e in F
, allora `e langolo tra
la direzione del moto della sorgente e la direzione della luce in F e v cos = v
r
, dove
v
r
`e considerata positiva se la sorgente si allontana dallosservatore. Si ottiene allora la
formula relativistica
=
_
1 v
2
/c
2
1 +v
r
/c
(5.3)
Si noti che secondo questa formula c`e un eetto Doppler anche quando v
r
= 0, ossia per
un puro moto trasverso.
Laberrazione `e contenuta nella (5.2) ( o nella (4.4), con u = c), valida per ogni coppia
di riferimenti inerziali. In particolare, se F `e il sistema di quiete della sorgente e F
36
rappresenta un laboratorio terrestre nel suo moto attorno al sole, la direzione del raggio
in F `e = , in F
`e
e dalla (5.2) si ottiene (A. Einstein, 1905)
tan
=
sin
_
1 v
2
/c
2
cos +v/c
(5.4)
Introducendo langolo di aberrazione =
, al primo ordine in v/c si ha
=
v
c
sin
La discussione dellaberrazione in relativit`a si `e rivelata una questione assai delicata,
nonostante lapparente semplicit`a del fenomeno. Ad esempio, la formula (5.4) si pu`o
applicare ad una coppia qualsiasi di sistemi inerziali; si pu`o allora notare che laberrazione
dipende solo dalla velocit`a relativa di F ed F
, ed `e quindi indipendente dalla velocit`a
della sorgente in F o in F
. In ogni caso, se si riserva la designazione di aberrazione allo
spostamento angolare delle stelle osservato dalla terra (il fenomeno osservato e quanticato
la prima volta da Bradley) allora leetto si pu`o certamente attribuire al moto della terra
rispetto alle sorgenti. Da questo punto di vista si pu`o osservare che laberrazione fornisce
una prova diretta del moto della terra attorno al sole.
37
Capitolo 3
Formalismo quadridimensionale ed
equazioni invarianti
Come abbiamo anticipato, le quattro coordinate di un evento in un sistema di riferimento
inerziale identicano un punto dello spazio-tempo. Ad ogni sistema F, F
,. . . , `e associato
il proprio sistema di coordinate {x
a
}, {x
a
}, . . . , per mezzo del quale si possono identi-
care gli eventi, e le trasformazioni di Lorentz sono allora interpretabili come applicazioni
lineari operanti sullo spazio di Minkowski. Si noti che i quattro numeri x
a
, a {0, 1, 2, 3},
deniscono ci`o che in algebra si chiama un quadri-vettore, o pi` u semplicemente un vet-
tore.
`
E tipico delle componenti dei vettori trasformarsi linearmente per eetto di una
rotazione dei vettori di base. Nel seguito, useremo alcune lettere della parte centrale
dellalfabeto latino, quali i, k, j, l, m, n, . . . , per indicare le componenti spaziali dei vettori.
Le lettere a, b, c, d, . . . denotano indici quadri-dimensionali.
Sottolineiamo il fatto essenziale che le coordinate devono essere denite operativamen-
te. Ad esempio, il tempo di ogni evento `e indicato da un orologio vicino allevento e
sincronizzato agli altri orologi dalla procedura indicata precedentemente, mediante lin-
vio di segnali elettromagnetici. Non `e aatto scontato che lo spazio-tempo, inteso come
linsieme di tutti gli eventi, abbia la struttura di spazio vettoriale caratteristica della rela-
tivit`a speciale, n`e questa struttura deriva logicamente dalla sua denizione euristica come
linsieme di tutti gli eventi. Tuttavia questo `e ci`o che si osserva localmente.
3.1 Prodotto scalare
Abbiamo anche visto che le trasformazioni di Lorentz non cambiano il valore della forma
quadratica (x
0
= ct) che rappresenta lintervallo spazio-temporale tra due eventi
Ds
2
= (x
0
y
0
)
2
+
3
i=1
(x
i
y
i
)
2
(1.1)
Indicheremo il secondo membro di questa equazione con la notazione propria delle forme
bilineari, (x y, x y), dove
(x, y) = (y, x) = x
0
y
0
+
3
j=1
x
j
y
j
38
Si ha allora
(x y, x y) = (x, x) + (y, y) 2(x, y)
Usando la metrica diagonale
ab
=
ba
, tale che
00
= 1,
ik
=
ik
, si pu`o scrivere
(x, y) =
3
a,b=0
ab
x
a
y
b
(1.2)
Questa forma quadratica bilineare denisce nello spazio di Minkowski un prodotto scalare
non degenere, che per`o non `e denito positivo. Per analogia con il caso euclideo,
ab
si
chiama il tensore metrico o, pi` u semplicemente, la metrica di Minkowski. Si noti che
mentre lindice di x
a
`e (convenzionalmente) posto in alto, gli indici della metrica sono
in basso; la ratio `e nel fatto che la forma (x, y) `e invariante di Lorentz, e diverr`a chiara
quando discuteremo gli invarianti. En passant, gli indici in alto si dicono controvarianti,
quelli in basso covarianti.
Nel seguito faremo uso della convenzione di Einstein degli indici ripetuti, secondo la
quale in un prodotto in cui gurano coppie di indici uguali, uno controvariante e laltro
covariante, si sottintende che siano sommati sui loro valori 0, 1, 2, 3. Per esempio, la (1.2)
si scriver`a pi` u semplicemente nella forma
(x, y) =
ab
x
a
x
b
Inne useremo unit`a di misura in cui c = 1 e adimensionale, salvo avviso contrario. Per
esempio, la luce si sposta di 30 centimetri in un nanosecondo, quindi prendendo come
unit`a di tempo il nanosecondo (ns), e di spazio 30 cm (chiamiamolo nanospazio, o nsp),
si avr`a che c = 1 nsp/ns, ma si noti che c non `e adimensionale. Se invece stipuliamo che
1 sec = 2, 998 10
10
cm si ha ancora c = 1, ma ora c `e un numero puro.
3.2 Gruppo di Lorentz
Come abbiamo ricordato sopra, le trasformazioni di Lorentz lasciano invariato lintervallo
spazio-temporale. Possiamo quindi denire queste trasformazioni come elementi del grup-
po delle isometrie dello spazio di Minkowski, gruppo che indicheremo semplicemente con
il simbolo L. In altri termini, si tratta di trasformazioni di coordinate lineari e omogenee
x
a
x
a
=
a
b
x
b
(2.1)
che preservano il prodotto scalare
(x, y) = (x, y)
Essendo non degenere, questo `e possibile se e solo se
ab
a
c
b
d
=
cd
(2.2)
Valgono le seguenti propriet`a elementari:
le trasformazioni di Lorentz formano un gruppo di dimensione sei: le (2.2) sono un
sistema di 10 equazioni per 16 variabili.
39
det = 1 per ogni L
gli elementi con determinante uguale a uno formano il sottogruppo proprio, indicato
con L
+
. Le inversioni, (x
0
, x) (x
0
, x), e (x
0
, x) (x
0
, x), non sono dunque
in L
+
, ma linversione completa (x
0
, x) (x
0
, x) si.
la componente 00 della (2.2) implica |
0
0
| 1; le matrici con
0
0
1 e det = 1
formano il sottogruppo proprio ortocrono, indicato con L
+
. Le trasformazioni con
0
0
1 invertono lordinamento temporale degli eventi, le trasformazioni proprie
ortocrone invece lo preservano
1
. Quindi laermazione che un evento p `e nel futuro
di un altro evento q `e invariante per trasformazioni di Lorentz proprie ortocrone.
`
E questo un fatto molto importante, perche senza di esso non si potrebbe dare un
signicato invariante alla causalit`a.
(
1
)
c
a
bc
=
ac
c
b
, che `e ovvia.
3.3 Tensori e campi di tensori
Dal punto di vista matematico, la metrica `e un esempio di tensore covariante simmetrico
di rango due (per dire ha due indici posti in basso, o pedici), mentre le coordinate di un
evento sono un esempio di tensore controvariante di rango uno (un solo indice posto in
alto, o apice), detto pi` u semplicemente quadrivettore.
3.3.1 tensori algebrici
Pi` u in generale, dato un sistema di coordinate inerziali (F, x
a
), possiamo denire un
tensore controvariante di rango n assegnando linsieme delle sue 4
n
componenti K
a
1
...an
,
a
i
{0, 1, 2, 3}, insieme con una legge di trasformazione che permetta di calcolare le
nuove componenti se si passa a nuove coordinate con una trasformazione di Lorentz. La
denizione `e la seguente:
se x
a
=
a
b
x
b
allora K
a
1
...an
=
a
1
b
1
an
bn
K
b
1
...bn
(3.1)
Il signicato sico della trasformazione di K in K
`e evidente: la formula (3.1) permette di
calcolare le componenti del tensore nel sistema di riferimento inerziale F
con le coordinate
x
a
=
a
b
x
b
se sono date le componenti dello stesso tensore in F. Nel contesto della
relativit`a ristretta tali oggetti si chiamano anche tensori di universo. Si vede che i tensori
si trasformano come il prodotto delle componenti di n vettori controvarianti. Per esempio,
dati due vettori x e y, loggetto K = x y, denito dalle componenti K
ab
= x
a
y
b
+x
b
y
a
,
`e un tensore di rango due con la propriet`a aggiuntiva di essere simmetrico: K
ab
= K
ba
.
In modo analogo si deniscono i tensori covarianti K
a
1
...am
, caratterizzati dalle regole di
trasformazione
K
a
1
...am
= (
1
)
b
1
a
1
(
1
)
bm
am
K
b
1
...bm
(3.2)
e i tensori misti di tipo [n, m], aventi n indici posizionati in alto e m posizionati in basso.
Alcuni esempi sono: il tensore unit`a, con componenti
a
b
uguali a uno se a = b e zero
1
Linversione dellordine temporale di eventi causalmente disgiunti `e invece possibile.
40
altrimenti, il tensore
ab
denito dalla relazione (ricordarsi che `e sottintesa la sommatoria
sui valori dellindice ripetuto b)
ab
bc
=
a
c
e che si potrebbe chiamare la metrica inversa. Questi tensori hanno la propriet`a speciale di
essere invarianti sotto lazione del gruppo di Lorentz, cio`e
a
b
=
a
b
e
ab
=
ab
. Un altro
tensore speciale `e il tensore completamente antisimmetrico e
abcd
, uguale a +1 se {a, b, c, d}
`e un permutazione pari di {1, 2, 3, 0}, e a 1 se `e una permutazione dispari. Infatti
e
abcd
= det e
mostra che e
abcd
`e un tensore invariante rispetto alle trasformazioni di Lorentz proprie
(det = 1).
Da un punto di vista matematico moderno, uno spazio di tensori `e uno spazio vettoriale
che trasporta una rappresentazione lineare del gruppo di Lorentz.
La metrica inversa stabilisce un isomorsmo tra i tensori covarianti e controvarianti, me-
diante loperazione di innalzamento e abbassamento degli indici; ad esempio, per un
quadrivettore si ha
v
a
=
ab
v
b
v
a
=
ab
v
b
La (2.2) e linvarianza di
ab
implicano subito la consistenza di queste formule con la
denizione dei tensori covarianti e controvarianti. In particolare, `e facile vericare che
ab
=
ac
bd
cd
Linsieme dei tensori di un dato tipo (covariante, controvariante o misto) forma in modo
naturale uno spazio vettoriale. Esistono per`o altre due operazioni importanti che si pos-
sono fare con i tensori: la contrazione su due indici mappa un tensore di rango [n, m] in
uno di rango [n 1, m1] mediante la formula
K
a
1
...a
k
...an
b
1
...b
j
...bm
K
a
1
...a...an
b
1
...a...bm
(3.3)
Per un tensore di rango due, la contrazione si chiama traccia
K
a
b
K
a
a
=
ab
K
ab
=
ab
K
ab
e il risultato `e uninvariante di Lorentz. Laltra operazione binaria `e il prodotto tensoriale,
che converte due tensori di rango [k, l] e [n, m] nel tensore di rango [k + n, l + m] dato
dalla formula naturale
(K T)
a
1
...a
k
c
1
...cn
b
1
...b
l
d
1
...dm
= K
a
1
...a
k
b
1
...b
l
T
c
1
...cn
d
1
...dm
(3.4)
Si noti che il prodotto `e associativo ma non commutativo.
`
E anche utile osservare che i
sottospazi dei tensori simmetrici con traccia zero, e dei tensori completamente antisim-
metrici, sono invarianti per trasformazioni di Lorentz. Per i quadrivettori abbiamo anche
il prodotto scalare
(u, v) =
ab
u
a
v
b
= u
a
v
a
= u
a
v
a
(3.5)
e il quadrato della norma u
2
=
ab
u
a
u
b
. Due quadrivettori u e v di diranno ortogonali se
(u, v) = 0; si deve per`o notare che questo non signica aatto che formino un angolo di
/2, perche la metrica non `e denita positiva.
41
3.3.2 campi tensoriali
Dato che le equazioni importanti della sica sono equazioni dierenziali, la trattazione
algebrica dei tensori ore solo limitate possibilit`a. Le funzioni dierenziabili a valori
tensoriali
x
a
K
a
1
...an
b
1
...bm
(x)
si chiamano genericamente campi di tensori, o campi tensoriali. La formula di trasforma-
zione deve ora tenere conto che si trasformano anche gli argomenti dei campi
K
ab...
cd...
(x
) =
a
n
b
m
(
1
)
u
c
(
1
)
v
d
K
nm...
uv...
(x), x
= x (3.6)
Se x
a
=
a
b
x
b
si ha
a
=
_
1
_
b
a
x
b
Questo mostra che le derivate parziali si trasformano come se fossero quadrivettori cova-
rianti: perci`o poniamo /x
a
=
a
.
`
E dunque chiaro che dierenziando k volte un campo
tensoriale di rango [n, m] si ottiene un campo tensoriale di rango [n, m+k]. Ad esempio,
se (x) `e un campo scalare, cio`e se
(x
) = (x)
(x) = (
1
x)
allora
a
(x) =
a
(x) `e un campo vettoriale covariante.
3.4 Equazioni invarianti
La regola per formare equazioni invarianti di Lorentz `e assai semplice: `e suciente equa-
gliare a zero qualunque espressione formata con campi tensoriali e con le loro derivate
parziali, che sia essa stessa un campo tensoriale per il gruppo di Lorentz. Naturalmen-
te si deve avere laccortezza di rispettare le regole per la moltiplicazione, la somma, la
contrazione e la dierenziazione dei tensori che vi compaiono. Il fondamento di questa
prescrizione `e il fatto ovvio che le espressioni tensoriali si trasformano linearmente. Il
tensore nullo in un sistema di coordinate `e allora automaticamente nullo in tutti gli altri.
3.4.1 Equazione di Klein-gordon
Un famoso esempio di equazione invariante di Lorentz `e lequazione di Klein-Gordon per
un campo scalare (o lequazione delle onde se m = 0)
ab
b
m
2
= 0 (4.1)
Si noti il fatto interessante: il parametro m `e chiaramente linverso di una lunghezza, ma
se insistiamo che m rappresenti una massa allora il termine m
2
andrebbe scritto nella
forma (m
2
c
2
/
2
), per ragioni dimensionali. Le pi` u semplici soluzioni sono le onde piane
k
= a exp(ik
a
x
a
), k
2
+m
2
= 0
42
e allora la frequenza k
0
=
k
2
+m
2
: si riconosce la somiglianza, non casuale, con
la relazione momento-energia di una particella relativistica. Unapplicazione di queste
soluzioni si ha nella riessione da uno specchio mobile. Supponiamo che lo specchio sia
ortogonale allasse x, lungo il quale si muove verso destra con velocit`a v. Londa piana
incida sullo specchio nel piano [x, y] con angolo di incidenza e ampiezza a = 1, e sia
m = 0: allora londa incidente `e
in
(t, x, y) = e
it+i(x cos +y sin )
e londa riessa
out
(t, x, y) = Re
i
ti
(x cos
y sin
)
Si noti che, a priori, sia lampiezza che la frequenza che langolo di riessione sono diversi
dai corrispondenti parametri dellonda incidente. Se v = 0 allora =
e =
.
Lazione dello specchio `e descritta dalla condizione al contorno di Dirichlet
in
(t, vt, y) +
out
(t, vt, y) = 0
il cui signicato `e che il campo totale a sinistra dello specchio deve annullarsi sulla sua
supercie, il piano di equazione x = vt. Si trovano allora le condizioni necessarie
sin =
sin
(1 v cos ) =
(1 +v cos
)
e R = 1.
E18: Si risolvano le equazioni precedenti per
. Si dovrebbe trovare (ricordarsi che
c = 1)
cos
=
(1 +v
2
) cos 2v
1 2v cos +v
2
=
1 2v cos +v
2
1 v
2
che `e la formula di Einstein per leetto Doppler da uno specchio mobile.
E19: Si ripristini la velocit`a della luce nelle formule precedenti.
E20: Si provi a ricavare la formula di Einstein dello specchio mobile applicando diret-
tamente le trasformazioni di Lorentz, tenendo presente che nel sistema di quiete dello
specchio =
e =
.
43
3.4.2 Equazione di Proca
Sia
a
un campo vettoriale: il tensore
ab
=
a
b
b
a
`e antisimmetrico. Il sistema di
equazioni
ab
+m
2
a
= 0
`e manifestamente covariante di Lorentz. Dalla denizione di
ab
seguono direttamente le
equazioni
e
abcd
bc
= 0
o anche
bc
+
c
ab
+
b
ca
= 0
E21: Quante sono le equazioni scritte sopra?
`
E il sistema determinato?
Le equazioni scritte sopra per un tensore antisimmetrico
ab
sono le pi` u semplici equazioni
invarianti non banali
2
. Come vedremo, con opportune identicazioni, e se m = 0, queste
sono identiche alle equazioni di Maxwell per il campo elettromagnetico nel vuoto, con
a
nel ruolo dei potenziali elettromagnetici. Si noti la conseguenza interessante
a
= 0
valida se m = 0 (questione: perche?).
3.5 Il tempo proprio
Lintervallo di tempo proprio fra due eventi con coordinate (x
0
, x
k
) e (x
0
+dx
0
, x
k
+dx
k
)
`e denito dalla formula
d
2
=
ab
dx
a
dx
b
= (dx
0
)
2
dx dx
Se un orologio si muove lungo una curva x(x
0
), lintervallo di tempo proprio (si assume
che lorologio abbia una risoluzione elevata ache d e dx
0
possano essere innitesimi) `e
d = dx
0
(1 v
2
/c
2
)
1/2
Dalla formula per la dilatazione del tempo si vede allora che d `e il tempo indicato
dallorologio in movimento. Si deve per`o assumere quanto segue: il tempo indicato da
un orologio in movimento non dipende dalla sua accelerazione, cosicche laumento di
tempo proprio dellorologio in ogni istante `e lo stesso che si avrebbe nel sistema di quiete
dellorologio nel dato istante. Si noti che lungo una curva di tipo luce |v| = 1 e d = 0.
2
bc
= 0 `e per noi un esempio di equazione invariante banale.
44
3.6 Il cono luce e le relazioni causali
La metrica divide i quadrivettori in tre classi distinte:
se
ab
V
a
V
b
< 0 si dice che V
a
`e di tipo tempo, o time-like
se
ab
V
a
V
b
> 0 allora V
a
`e di tipo spazio, o space-like
se
ab
V
a
V
b
= 0, V
a
`e di tipo luce, o nullo, o causale, o light-like.
Linsieme dei vettori nulli determina un cono con vertice nellorigine O
3
, detto il cono
luce e indicato con C. La falda superiore C
+
, dove x
0
> 0, `e il cono luce degli eventi nel
futuro di O, quella inferiore C
(x
0
< 0) `e il cono luce degli eventi nel passato di O. Ogni
evento in C
+
`e caratterizzato da un vettore di tipo tempo con x
0
> 0, ed `e perci`o nel
futuro causale dellorigine.
Se V
a
= x
a
y
a
, essendo x
a
ed y
a
le coordinate di due eventi p e q, la classe di V
a
determina le possibili relazioni causali tra p e q.
Se V
2
< 0 e V
0
> 0, si dir`a che p `e nel futuro cronologico di q, oppure che q `e nel passato
cronologico di p. Queste denizioni sono invarianti di Lorentz.
Se V
2
> 0,si dir`a che gli eventi p e q sono spazialmente separati. In questo caso non ci
pu`o essere una relazione causale tra p e q perche nessun segnale ha il tempo necessario
per arrivare dalluno allaltro, cio`e p accade prima che il segnale da q lo raggiunga, o
viceversa. Inoltre, la successione temporale di p e q pu`o essere invertita con una opportuna
trasformazione di Lorentz. Per nire, se V
2
= 0, un raggio di luce pu`o connettere p e q,
che appartengono dunque allo stesso cono luce.
E22: Sia p = (x
0
, x, 0, 0), con x > x
0
> 0, un evento nel futuro dellorigine (levento
(0, 0, 0, 0)). Si trovi unosservatore per il quale lorigine `e nel futuro di p. Quanti ce ne
sono? Si determini la velocit`a di un osservatore per il quale i due eventi sono simultanei.
E23: Mostrare che la somma di due vettori timelike diretti nel futuro `e un vettore timelike
diretto nel fututo.
Le relazioni causali si possono estendere ai sottoinsiemi dello spazio di Minkowski. Non
`e detto che il futuro causale di una regione spaziale, anche innita, comprenda tutto lo
spazio-tempo.
3.7 Curve
Data una curva dierenziabile parametrizzata x
a
(), R
1
, sia u
a
= x
a
() il quadrivet-
tore tangente alla curva: se u `e di tipo tempo e u
0
> 0 diremo che la curva `e del tipo
temporale e diretta nel futuro. Una tale curva `e sempre allinterno del cono luce futuro
uscente da un qualunque evento sulla curva, e per la velocit` a, v = dx/dx
0
, si ha |v| < 1:
la curva `e dunque la possibile linea di universo di una particella in moto, e si pu`o scegliere
per il tempo proprio .
Se invece u `e di tipo spazio diremo che la curva `e di tipo spaziale. Nessuna particella
pu`o percorrere una tale curva, perche in tal caso dovrebbe muoversi pi` u velocemente della
3
Levento con coordinate x
a
= 0.
45
luce.
4
Inne pu`o darsi che u
2
=
ab
u
a
u
b
= 0, nel qual caso la curva `e detta di tipo luce, o
curva nulla. Vedremo che le curve nulle rappresentano le linee di universo delle particelle
con massa zero. Si noti che non possono essere parametrizzate con il tempo proprio, dato
che d = 0 per eventi con separazione nulla.
Usando il tempo proprio, le componenti della quadrivelocit`a sono
u
0
= =
1
1 v
2
, u
k
= v
k
, v
k
=
dx
k
dt
(7.1)
Ricordiamo che abbiamo posto c = 1, e quindi x
0
= t. Segue la formula
u
2
ab
u
a
u
b
= u
a
u
a
= 1
Si denisce quadriaccelerazione il quadrivettore w
a
=
u
a
. Le sue componenti sono
w
0
=
d
dt
=
4
v a (7.2)
w = a +w
0
v (7.3)
dove a = dv/dt = v `e laccelerazione ordinaria. Vediamo che
w
a
= (0, a
) nel sistema F
istantaneamente in quiete con la particella; da questo
segue che w `e un quadrivettore di tipo spaziale, w
2
> 0.
derivando rispetto a la formula
ab
u
a
u
b
= 1 si ottiene la condizione
ab
u
a
w
b
= 0;
si esprime questo dicendo che u e w sono quadrivettori ortogonali. Questo segue
anche dal punto precedente, perche nel sistema di quiete si ha u = (1, 0) e w = (0, a).
w
2
ab
w
a
w
b
= |a
|
2
Possiamo adesso scrivere la condizione di simultaneit`a (2.20) in forma invariante
u
a
x
a
= 0 (7.4)
Cio`e un osservatore caratterizzato dalla velocit`a u
a
, giudica simultanei gli eventi che
appartengono alliperpiano ortogonale a u
a
.
E24: Si consideri la famiglia di curve parametrizzate
x
0
= a sinh(b), x
1
= cosh(b), x
2
= x
3
= 0
Qual`e lespressione del tempo proprio lungo la curva? si calcoli la quadri-velocit`a in
funzione del tempo. Stesso problema per la quadri-accelerazione. Sono le curve di tipo
tempo, spazio o luce?
4
Limpossibilit`a di questo fatto `e indicata dalle trasformazioni di Lorentz, che diventano complesse se
v > 1.
46
Capitolo 4
Dinamica relativistica di una
particella
[Ref.] L. D. Landau e E. M. Lifchitz, Teoria dei campi, Editori Riuniti (1976).
La meccanica relativistica parte con lassunzione che in un sistema di coordinate F
in
cui una particella `e momentaneamente in quiete, valgono le equazioni del moto della
meccanica non relativistica
d
2
r
dt
2
= f
(0.1)
Il principio di relativit`a permette allora di dedurre senza ambiguit`a le equazioni del moto
in ogni altro sistema F, se solo si assoggetta la (0.1) a una trasformazione di Lorentz.
Con ci`o non si ha per`o una denizione della forza in F.
4.1 quantit`a di moto, energia e forza
Sia m la massa propria della particella, la massa misurata nel sistema a riposo; deniamo
limpulso relativistico p
a
= mu
a
, e la forza relativistica
f
a
=
dp
a
d
= m
du
a
d
= mw
a
(1.1)
Si hanno le relazioni importanti
p
2
+m
2
= 0 (1.2)
e inoltre
p
0
=
_
p
2
+m
2
=
m
1 v
2
, p = mv =
mv
1 v
2
(1.3)
Dalla (1.1) segue f
a
u
a
= 0, da cui f
0
= f v. LEq. (1.2) denisce un iperboloide con
due componenti connesse, corrispondenti ai valori p
0
=
_
p
2
+m
2
. Il foglio sico `e la
componente con p
0
> 0.
Poiche
d
d
=
1
1 v
2
d
dt
=
d
dt
47
si pu`o scrivere la (1.1) nella forma
dp
dt
=
1
f,
dp
0
dt
=
1
f v (1.4)
Nel sistema di riferimento dove la particella `e istantaneamente in quiete, f coincide con la
forza Newtoniana, che indichiamo con f
N
. Perci`o identichiamo p = mv con la quantit`a
di moto e p
0
= m con lenergia della particella; le formule esplicite, reintroducendo c,
sono
p =
mv
_
1 v
2
/c
2
= mv +
E = cp
0
=
mc
2
_
1 v
2
/c
2
= mc
2
+
1
2
mv
2
+
Si ha anche
E =
_
m
2
c
4
+c
2
p
2
una forma che si pu`o applicare anche a particelle di massa zero, nel qual caso E = c|p|. Il
quadrimpulso di una tale particella `e un vettore nullo, p
2
= 0. Vediamo che limpulso si
riduce allespressione Newtoniana a meno di termini di ordine v
2
/c
2
, mentre nellenergia `e
presente la costante mc
2
, detto energia propria, o di quiete, della particella. Il signicato
di questo fatto sar`a discusso fra poco.
4.2 formule di trasformazione
Dal carattere vettoriale delle grandezze meccaniche introdotte si ricavano subito le regole
di trasformazione della forza
f = f
+ ( 1)
f
v
v
2
v + f
0
v/c, f
0
= (f
0
+f
v/c) (2.1)
e del momento
p = p
+ ( 1)
p
v
v
2
v + p
0
v/c (2.2)
p
0
= c
1
E = (p
0
+v p
/c) (2.3)
Come al solito, = (1 v
2
/c
2
)
1/2
.
4.3 sistemi di particelle
Per un sistema di particelle il quadrimpulso `e additivo
P
a
=
n
p
a
n
, p
2
n
= M
2
n
dove la somma `e denita sopra un piano di simultaneit`a dellosservatore, cio`e gli impulsi
vanno sommati a un tempo dato del sistema inerziale rispetto al quale i momenti stessi
48
sono riferiti. Tuttavia in assenza di collisioni ogni singolo p
a
`e conservato e ha dunque lo
stesso valore su ogni altro piano di simultaneit`a. Se un sottoinsieme di particelle collide,
conservata sar`a la somma dei quadri-momenti del sottoinsieme, che avr`a dunque lo stesso
valore su ogni altro piano di simultaneit`a. In entrambi i casi `e indierente su quale piano
di simultaneit`a si calcola la somma, che risulter`a cos` composta dallo stesso numero di
termini per tutti gli osservatori.
`
E allora evidente che P
a
`e un quadri-vettore.
La massa invariante, denita dalla P
2
= M
2
, `e maggiore della somma dei quadrati delle
masse
M
2
=
n
M
2
n
2
n>m
(p
n
, p
m
) >
n
M
2
n
perche i prodotti scalari (p
n
, p
m
) di vettori di tipo tempo aventi p
0
n
> 0 `e sempre denito
negativo. Ma si pu`o dire di meglio: dato che (p
n
, p
m
) > M
n
M
m
si ha di fatto la
diseguaglianza pi` u forte
M >
M
n
Questo mostra che lenergia interna (cinetica, ad esempio) del sistema contribuisce al-
la massa invariante, un aspetto della famosa equivalenza massa-energia. Le formule di
trasformazione (2.2), (2.3) mostrano che il sistema di riferimento nel quale P
= 0 `e
sicamente realizzabile se P
2
< 0. Infatti, dalle formule scritte si ricava (ripristinando c)
V =
cP
E
e dunque |V| < c se E > c|P|. Tale riferimento si chiama il sistema del centro di massa, e
lo indichiamo con F
0
. Dalle formule di trasformazione si ricava allora la quantit`a di moto
totale nel laboratorio F
P =
E
0
/c
2
V
_
1 V
2
/c
2
(3.1)
dove E
0
`e lenergia totale in F
0
. Da qui si vede che la massa invariante del sistema `e
uguale a E
0
/c
2
.
In ogni riferimento F si pu`o denire un punto
X
S
=
n
E
n
X
n
n
E
n
che `e la generalizzazione relativistica del centro di massa. Si trova facilmente
dX
S
dt
=
c
2
P
E
Questo mostra che tutti i punti X
S
sono in quiete in F
0
, ma non coincidono in generale
con X
S
0
. Infatti il centro di massa denito sopra dipende da F.
49
4.4 Equazioni del moto
Abbiamo notato sopra che la forza relativistica si riduce alla forza Newtonian a nel sistema
di quiete istantaneo della particella. Per trovare la forza nel sistema del laboratorio F,
usiamo il fatto che f
a
`e un quadrivettore; allora
f = f
N
+ ( 1)
f
N
v
v
2
v, f
0
= f
N
v (4.1)
Essendo f
a
u
a
= 0, si ha anche f
0
= f v. Vediamo che la denizione (1.1) fornisce un
sistema di quattro equazioni dierenziali che possono essere usate per determinare il moto
della particella (se la forza Newtoniana f
N
`e nota)
dp
dt
=
1
f F, m
d
dt
= F v (4.2)
f si chiama la forza di Minkowski, mentre F `e semplicemente la forza. Infatti, solo con
questa denizione la forza `e la derivata di una quantit`a di moto, che si conserva per sistemi
chiusi. Dalla (4.2) si deduce facilmente (ripristinando c)
m
dv
dt
= F
F v
c
2
v (4.3)
Si vede da qui che laccelerazione non `e proporzionale alla forza, un fatto che complica la
descrizione delle traiettorie relativistiche. Se f
N
`e dovuta alla presenza di un campo di
forza, cio`e se f
N
`e una funzione del punto, `e evidente che la forza va calcolata nel punto
occupato dalla particella; la formula di trasformazione dei tensori (vedi Eq. (3.6)) mostra
allora che gli argomenti di f e f
0
sono le coordinate x
a
della particella in moto. Ad esempio,
per una carica in un campo elettromagnetico si ha f
N
= eE
(t
, x
), questultimo essendo
il campo elettrico nel sistema di quiete della particella allistante t
, con la particella nel
punto x
; allora
dp
dt
= eE
(t
, x
) +e( 1)
E
(t
, x
) v
v
2
v
Come vedremo, dalla formula di trasformazione dei campi elettromagnetici (v. la (3.4))
si ha
E
(t
, x
) + ( 1)
E
(t
, x
) v
v
2
v =
_
E(t, x) +
v
c
B(t, x)
_
dove (t, x) e (t
, x
) sono connessi dalle formule di trasformazione (2.21) e (2.22). Si ha
quindi lequazione del moto relativistica
d
dt
_
mv
_
1 v
2
/c
2
_
= eE(t, x) +e
v
c
B(t, x) (4.4)
in cui la forza di Lorentz viene ricavata dalla forza puramente elettrica come conseguenza
necessaria della simmetria di Lorentz.
Per riassumere, lequazione del moto di una particella relativistica `e la (4.3), o la (4.2) o
anche la (1.1), dove il vettore f
a
si calcola in funzione della forza Newtoniana usando la
formula di trasformazione dei quadrivettori (4.1).
50
4.5 Moto uniformemente accelerato, o iperbolico
Supponiamo che la forza Newtoniana f
N
abbia sempre la direzione della velocit`a e sia
costante, f
N
= mg; ci`o equivale a dire che in ogni sistema in cui la particella `e istan-
taneamente in quiete, laccelerazione `e costante e diretta come la velocit`a. Orientando
questultima lungo lasse x, dalla (4.1) si ottiene la quadriforza per questo caso
f
a
= (mgv, mg, 0, 0) = mg(u
1
, u
0
, 0, 0) = m(du
0
/d, du
1
/d, 0, 0) (5.1)
Dalleq. (4.2) si ottiene
dv
dt
= g
o, ripristinando c e scegliendo il dato iniziale v(0) = 0,
v =
gt
_
1 +g
2
t
2
/c
2
Si noti v c per t ; nemmeno una forza che agisce per un tempo innito riesce a
spingere la particella oltre la velocit`a limite. Integrando si ottiene (scegliendo x(0) = 0)
x(t) = c
2
g
1
_
_
1 +g
2
t
2
/c
2
1
_
Osserviamo che
(x +c
2
/g)
2
c
2
t
2
= c
4
g
2
la quale mostra che la linea di universo della particella `e un ramo di iperbole. Dalla Fig. [5]
si vede che la traiettoria `e sempre esterna al cono luce passante per il punto (0, c
2
/g)
(scelto come origine nella gura)
Figura 4.1: Moto iperbolico
t
x
Gli eventi al di l`a del piano x
0
c
2
x/g = 0 non possono inuenzare la particella, quelli al
di l`a del piano x
0
+c
2
x/g = 0 non possono esserne inuenzati.
51
Cerchiamo la curva parametrizzata dal tempo proprio; dalla (5.1) si ha
du
0
d
= u
1
,
du
1
d
= u
0
e dunque, con i dati iniziali usati sopra, u
0
= cosh g, u
1
= sinh g; da qui seguono le
formule (ripristinando c)
x
0
= c
2
g
1
sinh(g/c) (5.2)
x
1
= c
2
g
1
(cosh(g/c) 1) (5.3)
La (5.2) mostra drammaticamente gli eetti relativistici sul tempo. Il tempo a bordo di
un veicolo spaziale uniformemente accelerato varia logaritmicamente con il tempo T
di
un osservatore terrestre. Infatti, se gT
/c 1, dalla (5.2) si ottiene
1
cg
1
ln (2gT
/c)
Ad esempio, un viaggio di 100 anni terrestri con g = 9, 81 m sec
2
(laccelerazione di
gravit`a terrestre, per rendere confortevole il viaggio) si compie in soli 5, 3 anni secondo
lequipaggio della nave spaziale, e la distanza percorsa sarebbe di circa 96 anni luce.
4.6 E = mc
2
Abbiamo gi`a notato che la massa invariante di un sistema arbitrario `e uguale a E
0
/c
2
(lenergia nel sistema di quiete F
0
), se valgono le trasformazioni di Lorentz. Ma possiamo
andare oltre. Consideriamo un sistema sico arbitrario coinvolto in un processo di emis-
sione di due particelle identiche in direzioni opposte. Non si pensi alle particelle come
a punti materiali, bens come a sistemi composti, quali due particelle alfa, o due nuclei
pi` u complessi oppure due impulsi di onde elettromagnetiche. Consideriamo il processo
nel riferimento del centro di massa F
0
, dove P = 0. In tale riferimento il sistema rimane
fermo se vale la legge di conservazione del momento, mentre la conservazione dellenergia
richiede
E
0
E
1
= 2
E
0
ed E
1
sono le energie prima e dopo il processo di emissione e 2 `e lenergia dei due
frammenti. In un laboratorio rispetto al quale il sistema si muove con velocit`a V lungo
lasse x, lenergia dei frammenti `e
1
= ( +V p cos )
1
= ( V p cos )
e dalla conservazione dellenergia
E
0
E
1
=
1
+
2
=
2
_
1 V
2
/c
2
1
Si ricordi che sinh
1
(x) = ln(x +
x
2
+ 1).
52
o anche
(E
0
E
0
) (E
1
E
1
) = 2
_
1
_
1 V
2
/c
2
1
_
(6.1)
Il primo termine `e la dierenza fra lenergia del sistema quando la sua velocit`a `e V e
lenergia quando `e in quiete, e dunque per basse velocit`a E
0
E
0
= M
0
V
2
/2, dove M
0
`e la massa iniziale. Analogamente, se M
1
`e la massa nale si ha E
1
E
1
= M
1
V
2
/2, e
quindi la (6.1) diventa, al primo ordine in V
2
/c
2
,
M = M
0
M
1
=
2
c
2
(6.2)
Si vede da qui lequivalenza tra massa ed energia: in seguito allemissione il sistema
perde massa (e dunque inerzia) nella quantit`a indicata. Si pu`o anche osservare che nel
riferimento del laboratorio il sistema perde la quantit`a di moto
P =
2/c
2
_
1 V
2
/c
2
V
come si ricava dalle formule di trasformazione (2.2). Siccome la velocit`a del sistema
non cambia nel processo di emissione, questo `e possibile solo se si ha una perdita di
massa inerziale pari a 2/c
2
. Un caso ancora pi` u generale `e stato considerato da Lorentz
(1911). Scriviamo il quadrimpulso di un sistema chiuso arbitrario
1
(che pu`o consistere
di particelle, molle in tensione, raggi di luce, etc...) nella forma
P =
m
0
u
_
1 u
2
/c
2
= mu, P
0
=
m
0
c
_
1 u
2
/c
2
= mc
dove u `e la velocit`a del sistema di riferimento del centro di massa F
0
; considerando per
semplicit`a una trasformazione di Lorentz lungo lasse x, si ha ( = v/c)
P
x
=
P
x
mv
_
1
2
, P
y
= P
y
, P
z
= P
z
Ora il sistema interagisca con un altro sistema
2
. Le leggi di conservazione danno
P
1
+P
2
= 0, P
1
+P
2
= 0, E
1
+E
2
= 0
Quindi ( = (1
2
)
1/2
)
P
1x
+P
2x
= (P
1x
+P
2x
vmvE
2
/c
2
) = v(E
1
/c
2
m) = 0
da cui m = c
2
E
1
. In entrambi i casi possiamo concludere che
se lenergia e la quantit`a di moto formano un quadrivettore del gruppo di Lorentz
e obbediscono alle omonime leggi di conservazione
53
allora ad ogni trasferimento di energia E, corrisponde un trasferimento di massa m =
E/c
2
. In generale linterazione cambia sia la massa che la velocit`a del sistema, per cui
con m si deve intendere la variazione della massa relativistica: m = m
0
/
_
1 u
2
/c
2
.
La relazione massa/energia `e osservata soprattutto nelle reazioni nucleari. Ad esempio
nel processo
3
7
Li + H
2
4
He +
2
4
He
dalla conservazione dellenergia si ha
(M
Li
+ M
H
2M
He
)c
2
= 2K
He
K
H
Il difetto di massa nel primo membro `e misurato e vale circa 17, 31 Mev, mentre le misure
della variazione di energia cinetica nel secondo membro danno 17, 28 Mev. La notazione
K
X
denota lenergia cinetica della specie X
K
X
=
M
X
c
2
_
1 v
2
/c
2
M
X
c
2
La trasformazione di massa in energia nelle reazioni nucleari `e la principale fonte di energia
nelle stelle.
4.7 decadimento di particelle ed energie di soglia
4.8 Il moto dello spin e la precessione di Thomas
Consideriamo una particella dotata di momento angolare intrinseco, descritto nel sistema
di quiete (momentaneo) della particella dal vettore J
0
; si pu`o pensare a J
0
come al valore
medio delloperatore del momento angolare nel sistema a riposo, oppure come al momento
angolare orbitale di una trottola nel limite in cui il suo momento di inerzia tende a zero
e la velocit`a angolare tende allinnito, restando costante il loro prodotto. In entrambi i
casi, ci riferiremo al vettore J
0
semplicemente come allo spin della particella. Si noti che
le conclusioni della relativit`a sul moto dello spin sono comunque indipendenti dal modello
preciso che governa i suoi gradi di libert`a interni.
Se nel sistema di quiete F
0
il momento torcente si annulla, il vettore J
0
non precede
(rispetto a F
0
)
dJ
0
dt
= 0 (8.1)
La descrizione relativistica dello spin introduce il quadri-vettore J
a
che in F
0
si riduce a
J
a
0
= (0, J
0
); dunque si ha sempre J
2
> 0 e J
a
u
a
= 0, dove u
a
= (, v) `e la quadri-velocit`a
della particella.
Qual`e ora lequazione relativistica (cio`e invariante di Lorentz) che descrive il moto dello
spin? Osservando che in F
0
si ha dt
= d, si potrebbe pensare che la corretta equazione
relativistica sia lequazione invariante dJ
a
/d = 0. Tuttavia si vede facilmente che non
pu`o essere cos`: la condizione di ortogonalit`a J
a
u
a
= 0 implicherebbe infatti la nuova
54
condizione u
b
J
b
= 0, u
b
= du
b
/d, che in generale non `e vera. Scriviamo allora lequazione
pi` u generale che si riduce alla (8.1) nel sistema di quiete
dJ
a
d
= u
a
(8.2)
Contraendo con u
a
e usando lortogonalit`a J
a
u
a
= 0 si trova
= a
b
J
b
(8.3)
Le formule (8.2) e (8.3) risolvono il problema posto. Si noti che si pu`o anche scrivere la
(8.2) nella forma
dJ
a
d
=
a
b
J
b
,
ab
= u
a
u
b
u
b
u
a
(8.4)
La legge di trasporto di un vettore secondo questa equazione `e detta trasporto di Fermi-
Walker. Dalle trasformazioni di Lorentz si deducono le formule
J = J
0
+
( 1)
v
2
(J
0
v) v, J
0
= J v = (J
0
v) (8.5)
precessione dello spin
La (8.5) mostra che la parte spaziale di J
a
non rappresenta lo spin della particella visto
nel sistema del laboratorio, che `e invece descritto dal vettore J
0
. Dallequazione del moto
si ha
dJ
dt
=
dJ
0
dt
+
d
dt
_
( 1)
v
2
(J
0
v)
_
v +
( 1)
v
2
(J
0
v) v = a
b
J
b
v
Si vede facilmente che a
b
J
b
= a
0
J
0
+a J =
2
v J, se si usano le formule esplicite per
la quadri-accelerazione
a =
dv
dt
=
4
(v v)v +
2
v, a
0
=
4
(v v)
Inoltre J
0
v =
1
J v =
1
J
0
e
dJ
0
dt
= a
b
J
b
=
2
v J
Possiamo quindi scrivere
dJ
0
dt
=
_
2
( v J)
d
dt
_
( 1)
v
2
J
0
__
v
( 1)
v
2
(J
0
v) v
Un calcoletto un p`o lungo ma elementare porta al risultato semplice
2
( v J)
d
dt
_
( 1)
v
2
J
0
_
=
1
v
2
(J
0
v)
Questo si ottiene usando: (a) la formula di trasformazione di J per eliminare J in favore
di J
0
, (b) lequazione del moto per J
0
e (c) la relazione
d
dt
=
3
v v
55
In denitiva si ottiene lequazione per la precessione dello spin
dJ
0
dt
=
( 1)
v
2
((J
0
v)v (J
0
v) v) = J
0
(8.6)
dove la velocit`a angolare di precessione `e
=
( 1)
v
2
v v (8.7)
4.9 Principio variazionale
Il moto della particella libera pu`o essere ricavato da un principio variazionale cha ha un
suo interesse particolare. Infatti lazione di un sistema libero `e il punto di partenza per
lintroduzione delle interazioni. Si consideri la seguente azione per una particella di massa
m
I = m
_
(i,f)
d = m
_
f
i
_
dx
a
dx
a
(9.1)
dove (a, b) `e una curva dierenziabile timelike che unisce gli eventi i ed f. Si noti che
lazione `e invariante di Lorentz. Variando le coordinate degli eventi si ottiene, al primo
ordine in x
a
, la formula
I = m
_
f
i
dx
2
= m
_
f
i
dx
a
d
dx
a
= p
a
x
a
|
f
i
_
f
i
dp
a
d
x
a
dove p
a
= mu
a
= m x
a
`e il quadri-impulso della particella. Se le variazioni sono nulle negli
estremi della curva, allora la condizione estremale I = 0 equivale allequazione del moto
p
a
= 0. Le soluzioni si chiamano curve estremali dellazione.
Considerando lazione sullestremale come una funzione delle coordinate del punto termi-
nale dellestremale, dalla formula appena scritta si ottiene
P
a
=
a
I (9.2)
La mass-shell condition, p
2
+ m
2
= 0, si traduce allora nella versione relativistica
dellequazione di Hamilton-Jacobi
a
I
a
I +m
2
= 0 (9.3)
Per un sistema di particelle libere scriveremo
I =
n
I
n
Lagrangiana
56
Capitolo 5
Elettrodinamica covariante
`
E ben noto che i campi elettromagnetici obbediscono alle equazioni di Maxwell. La prima
coppia di queste equazioni
rot E =
1
c
B
t
, div B = 0 1
a
coppia (0.1)
`e equivalente al fatto che i campi derivano dai potenziali A e , secondo le formule
standard
E =
1
c
A
t
, B = rot A (0.2)
La seconda coppia introduce linterazione con le sorgenti dei campi, che sono le cariche
elettriche e le correnti,
rot B =
1
c
E
t
+
4
c
J, div E = 4 2
a
coppia (0.3)
`e la densit`a di carica, J la densit`a di corrente, e sono entrambe vincolate dallequazione
di continuit`a
t
+ div J = 0 (0.4)
5.1 Forma covariante delle equazioni
Per studiare la covarianza di queste equazioni rispetto al gruppo di Lorentz, introduciamo
il potenziale
A
a
= (, A), A
a
= (, A)
e il campo antisimmetrico
F
ab
=
a
A
b
b
A
a
(1.1)
Allora il confronto con la (0.2) d`a le componenti
F
j0
= E
j
, F
ij
= e
ijk
B
k
57
o in forma pi` u esplicita
F
ab
=
_
_
_
_
0 E
x
E
y
E
z
E
x
0 B
z
B
y
E
y
B
z
0 B
x
E
z
B
y
B
x
0
_
_
_
_
(1.2)
Da questo si verica direttamente che le quattro equazioni
a
F
bc
+
b
F
ca
+
c
F
ab
= 0 (1.3)
sono esattamente identiche alla 1
a
coppia delle equazioni di Maxwell, e dunque che la
covarianza di queste equazioni `e equivalente al fatto che F
ab
sia un tensore di universo
covariante (cio`e un tensore nello spazio di Minkowski).
Per riscrivere la seconda coppia introduciamo formalmente la corrente quadri-dimensionale
di componenti
J
a
= (c, J) (1.4)
Lequazione di continuit`a (0.4) assume la forma covariante
a
J
a
= 0 (1.5)
e tale veramente sar`a se J
a
`e un quadri-vettore. Come vedremo, questo segue dallin-
varianza di Lorentz della carica elettrica. LEq. (0.4) prende il nome di condizione di
conservazione della corrente.
Si verica direttamente dalla (1.2) che le quattro equazioni
a
F
ab
=
4
c
J
b
, F
ab
=
ac
bd
F
cd
(1.6)
sono esattamente identiche alla 2
a
coppia delle equazioni di Maxwell. Ad esempio, se
b = 0 si ha
k
F
k0
= 4, perche F
00
= 0 e J
0
= c. Ma F
k0
= E
k
, da cui si ottiene
appunto lequazione div E = 4. Si noti che che la covarianza delle (1.6) richiede che J
a
sia un quadri-vettore. Mostriamo che questo fatto segue dallinvarianza di Lorentz della
carica elettrica.
5.2 Corrente elettrica
Consideriamo una carica puntiforme di valore e, e sia z
a
(p) la sua linea di universo para-
metrizzata da p. Se la carica `e invariante per trasformazioni di Lorentz allora lintegrale
esteso alla linea di universo
J
a
(x) = e
_
(4)
(x z(p))dz
a
(2.1)
denisce un campo di quadri-vettori che chiameremo la quadri-corrente elettrica. Si noti
che lintegrale non dipende dalla scelta del parametro p. Possiamo allora scegliere p = z
0
,
cos` che z
0
(p) = z
0
e lintegrale diventa
J
a
(x
0
, x) = e
(3)
(x z(x
0
)) v
a
, v
a
=
dz
a
dx
0
(2.2)
La denizione di J
a
come corrente elettrica `e giusticata dalle seguenti propriet`a
58
vale lequazione di continuit`a
a
J
a
= 0 (2.3)
J
0
rappresenta la densit`a di carica elettrica. Infatti
_
J
0
dx = e (2.4)
come segue immediatamente dalla (2.2).
Linvarianza di Lorentz della carica `e resa necessaria dal principio di relativit`a, perche
la carica elettrica `e la sorgente dei campi elettromagnetici e, dunque, misure dei campi
potrebbero rivelare la velocit`a del sistema di riferimento. Pi` u concretamente, una dipen-
denza della carica dellelettrone dalla velocit`a `e sicuramente inamissibile perche altrimenti
non sarebbe possibile avere atomi elettricamente neutri. Inoltre gli spettri atomici sono
indipendenti dalla velocit`a degli elettroni negli atomi e dipendono dalla velocit`a di questi
ultimi solo attraverso leetto Doppler.
Il carattere vettoriale della corrente implica subito il carattere tensoriale di F
ab
, e con
esso la covarianza delle equazioni di Maxwell (1.3) e (1.6). Dato che la carica `e additiva,
la corrente di un sistema di particelle sar`a
J
a
(x) =
n
e
n
_
(4)
(x z
n
(p)) dz
a
n
(2.5)
oppure
J
a
(x
0
, x) =
n
e
n
(3)
(x z
n
(x
0
)) v
a
n
(2.6)
La conservazione della corrente espressa dallequazione
a
J
a
= 0 ha una conseguenza
molto importante che ritroveremo anche nel caso di correnti conservate pi` u generali di
J
a
. Si consideri la regione di spazio-tempo racchiusa tra i due iperpiani x
0
= ct
1
e
x
0
= ct
2
> ct
1
. Allora
0 =
_
a
J
a
d
4
x =
_
x
0
=ct
2
J
0
d
3
x
_
x
0
=ct
1
J
0
d
3
x +
_
dx
0
_
d
3
xdiv J (2.7)
Se J tende a zero allinnito in maniera sucientemente rapida lultimo integrale si annulla
e si ha la legge di conservazione della carica elettrica
dQ
dt
= 0, Q =
_
J
0
(t, x)d
3
x
dove `e liperpiano x
0
= cte. Pi` u in generale,
Q =
_
J
a
N
a
(t, x)dV
dove `e liperpiano N
a
x
a
= cte e dV lelemento di volume proprio sulliperpiano, cio`e,
per chi conosce le forme dierenziali, dV = N
d
e
abcd
dx
a
dx
b
dx
c
/6.
59
Q `e invariante di Lorentz: infatti, scegliendo liperpiano
denito da x
0
= cte, per la
conservazione della corrente Q non cambia e dV = d
3
x
. Ma allora
Q =
_
J
a
N
a
(t, x)dV =
_
a
N
a
(t, x
)dV =
_
0
(t, x
)d
3
x
= Q
perche la normale a
per losservatore in moto che usa le coordinate x
a
`e precisamente
N
a
= (1, 0, 0, 0).
teorema di Gauss
Possiamo scrivere la (2.7) nella forma di un teorema di Gauss in quattro dimensioni. A
tale scopo indichiamo con il bordo orientato della regione . Assumeremo che sia
lunione disgiunta di certe ipersuperci, alcune delle quali sono spaziali (il vettore normale
`e di tipo tempo), altre temporali (il vettore normale `e di tipo spazio), ma nessuna `e nulla
(il vettore normale `e di tipo nullo). Sia n
a
il vettore normale al bordo, orientato verso
lesterno di sui tratti di che sono di tipo tempo, e verso linterno sui tratti spaziali.
Inne sia K
Aa
un tensore, dove A indica gli altri indici possibilmente presenti. Allora si
ha
_
a
K
Aa
d
4
x =
_
K
Aa
n
a
dV (2.8)
dove dV `e lelemento di volume sul bordo. La ricetta per dV `e la seguente: scelte tre
coordinate (y
1
, y
2
, y
3
) sul bordo, la distanza che vi `e indotta dalla metrica di Minkowski
sar`a
ds
2
=
ab
dx
a
dx
b
=
3
i,j=1
h
ij
(y)dy
i
dy
j
, h
ij
(y) =
ab
x
a
y
i
x
b
y
j
perche se x
a
(y
j
) sono le coordinate inerziali di un punto sul bordo, si ha evidentemente
dx
a
=
3
j=1
x
a
y
j
dy
j
Se h = det(h
ij
), la formula per la misura `e
dV =
h d
3
y
Si noti che dV , oltre a essere invariante per trasformazioni di Lorentz, lo `e anche per
cambiamenti arbitrari di coordinate sul bordo, y
i
y
i
(y). Si pu`o interpretare dV come
lelemento di volume proprio, misurato in un sistema di coordinate ripetto al quale lele-
mento `e in quiete. La sua invarianza spiega linvarianza di Lorentz della carica Q o, pi` u
in generale, del secondo membro della (2.8).
invarianza di gauge
60
La prescrizione F
ab
=
a
A
b
b
A
a
non determina i potenziali, perche la cosiddetta
trasformazione di gauge
A
a
(x) = A
a
(x) +
a
f(x) (2.9)
lascia invariati i campi elettromagnetici, e dunque anche le equazioni di Maxwell.
`
E questa
la ben nota invarianza di gauge dellelettrodinamica, che rende i potenziali non misurabili.
Questa stessa simmetria impedisce anche che le equazioni per i potenziali non possano
essere risolte univocamente. Tuttavia la seconda coppia diventa, sostituendovi la (1.1),
2A
a
b
A
b
=
4
c
J
a
(2.10)
Questo suggerisce di sfruttare linvarianza di gauge per imporre la condizione di Lorenz
(non Lorentz)
a
A
a
= 0 (2.11)
che ha il merito di semplicare grandemente le equazioni di campo e di essere invariante
di Lorentz (non Lorenz). Si osservi che la trasformazione di gauge A
a
A
a
+
a
, dove
2 = 0, preserva la condizione di Lorenz e la (2.10).
5.3 Trasformazione dei campi
Consideriamo per prima una trasformazione di Lorentz speciale lungo x, con velocit`a v,
e poniamo
a
b
= (
1
)
a
b
; si ha
a
b
=
_
_
_
_
v 0 0
v 0 0
0 0 1 0
0 0 0 1
_
_
_
_
(3.1)
Dalla formula di trasformazione
F
ab
(x
) =
c
a
d
b
F
cd
(x)
si ricavano le formule
E
x
= E
x
, E
y
= (E
y
v
c
B
z
), E
z
= (E
z
+
v
c
B
y
) (3.2)
B
x
= B
x
, B
y
= (B
y
+
v
c
E
z
), B
z
= (B
z
v
c
E
y
) (3.3)
Si noti come il carattere elettrico o magnetico dei campi diventi un aspetto relativo. In
forma vettoriale
E
= (1 )
E v
v
2
v +
_
E+
1
c
v B
_
(3.4)
B
= (1 )
B v
v
2
v +
_
B
1
c
v E
_
(3.5)
61
Interessanti sono anche le regole di trasformazione delle correnti
= ( vJ
x
/c
2
), J
x
= (J
x
v) (3.6)
Ad esempio, un lo percorso da corrente appare elettricamente carico a un osservatore
in moto rispetto al lo. Ci`o si accorda con il fatto che un tale osservatore osservebbe,
secondo le (3.2), un campo elettrico direttamente proporzionale al campo magnetico del
lo. Le formule (3.6) mostrano anche che la distinzione fra correnti di convezione (J = v)
e correnti di conduzione dipende dal sistema di riferimento (ovvero `e relativa). Per una
semplice spiegazione microscopica della misteriosa apparizione di cariche nei conduttori
in movimento si veda W. Pauli, Theory of Relativity, Dover Ed. (1958).
5.4 Elettrodinamica fenomenologica
Diamo qui un breve cenno alla formulazione relativistica delle pi` u importanti equazioni
costitutive dellelettrodinamica macroscopica. Per un dielettrico omogeneo e isotropo
queste sono
D =
E,
B =
H (4.1)
mentre per i conduttori percorsi da corrente continua, o alternata con frequenza sucien-
temente bassa
1
, si ha la legge di Ohm per la corrente di conduzione
J
c
=
E (4.2)
I campi macroscopici in queste equazioni sono campi medi allinterno dei materiali, `e la
costante dielettrica, la permeabilit`a magnetica
2
e la conducibilit`a. Tutte le equazioni
si riferiscono naturalmente a dielettrici o conduttori immobili. Sorge dunque la questione
di generalizzarle ai corpi in moto, e in questo la relativit` a `e di grande aiuto.
Innanzitutto postuliamo che la coppia (
D,
H) corrisponda al tensore H
ab
nello stesso modo
in cui (
E,
B) corrispondono al tensore F
ab
.
`
E facile convincersi che le uniche equazioni
tensoriali lineari che si riducono alle (4.1) nel sistema di quiete sono, rispettivamente,
H
ab
U
b
= F
ab
U
b
(4.3)
F
ab
U
c
+F
ca
U
b
+F
bc
U
a
= (H
ab
U
c
+H
ca
U
b
+H
bc
U
a
) (4.4)
dove U
a
`e la quadri-velocit`a del dielettrico. Queste sono le equazioni costitutive di
Minkowski. Per quanto riguarda la legge di Ohm, `e chiaro che deve aversi
J
a
+U
a
U
b
J
c
= F
ab
U
b
(4.5)
in quanto il secondo membro `e ortogonale a U
a
. Per rendersi conto del contenuto di queste
formule scriviamole in notazione tridimensionale. Ponendo b = k {1, 2, 3} nella (4.3) si
avr`a (si ricordi che c = 1)
D +v
H = (
E +v
B)
1
Si veda, per esempio, il trattato di L. Landau, L. P. Pitaevskii e E. Lifschitz, Electrodynamics of
Continuous Media, 2 edition (15 Oct 1984)
2
Cosicche n =
`e lindice di rifrazione.
62
Analogamente, dalle (4.4),
B v
E = (
H v
D)
Eliminando
B dalla prima e
D dalla seconda si ottengono le formule seguenti di Minkowski
(1911)
D =
(1 v
2
)E ( 1)(v E)v + ( 1)v H
1 v
2
B =
(1 v
2
)H( 1)v E( 1)(v H)v
1 v
2
Si noti che con le nostre unit`a 1/
`e la velocit`a della luce nel dielettrico.
E: Si ripristini la velocit`a della luce nelle formule precedenti. Si approssimino le formule
tenendo conto solo dei termini di ordine zero e uno in v/c.
Per la legge di Ohm si trova facilmente la formula
J = (E (v E)v +v B) + v
Lultimo termine rappresenta la corrente di trasporto dovuta al fatto che il conduttore
mobile appare elettricamente carico e dunque Jv = J
c
rappresenta la vera corrente di
conduzione, per la quale vale la formula
J
c
= (E(v E)v +v B)
E: Si ripristini la velocit`a della luce nella formula ottenuta. Si approssimi la formula
tenendo conto solo dei termini di ordine zero e uno in v/c. E: Si mostri che la carica
acquisita dal conduttore in moto `e
=
1
c
2
v J
c
1 v
2
/c
2
Leetto `e dunque trascurabile.
63
Capitolo 6
Principi variazionali
Lelettrodinamica `e un esempio concreto di teoria dei campi, ma non `e il solo. Allo scopo
di costruire teorie invarianti di Lorentz, `e estremamente conveniente usare un principio
variazionale di minima azione, in cui le equazioni del moto per i campi si deducono
dalla condizione di stazionariet`a di un funzionale della forma
I[] =
_
L(x)d
4
x (0.1)
Terminologia: i campi hanno in generale molte componenti che indichiamo con
A
(x),
con la notazione intendiamo il campo le cui componenti sono
a
A
(x), I[] `e lazione
ed L(x) `e la densit`a (cio`e una quantit`a che si pu`o integrare) Lagrangiana. Per i nostri
scopi una Lagrangiana `e una funzione dei campi
L(x) = L((x), (x), x)
che possiede la propriet`a di invarianza relativistica seguente: se indichiamo con
A
(x) il
campo che risulta da una trasformazione di Poincar`e (Lorentz e traslazioni), si ha
L
(x) L
_
A
(x), ()
A
(x), x
_
= L
_
A
(
1
(x a)),
A
(
1
(x a)),
1
(x a)
_
=L
_
1
(x a)
_
(0.2)
Ovvero L(x) `e uno scalare di Lorentz. La richiesta serve naturalmente a garantire la
covarianza delle equazioni del moto.
Per le traslazioni pure si ha = 1 e
(x) = (x a), e allora la (0.2) stipula che L(x)
non deve dipendere in maniera esplicita dalle coordinate.
6.1 Equazioni di Eulero e Lagrange
Se una piccola variazione,
A
(x), di una data congurazione
A
(x), non cambia il
valore di I al primo ordine in
A
(x), si dice che lazione `e stazionaria nel punto
A
(x).
In questo caso si ha
I =
_
I
A
(x)
A
(x) d
4
x = 0
64
Se le variazioni
A
(x) sono arbitrarie e tra loro indipendenti, si ottiene la condizione
I
A
(x)
= 0 (1.1)
Questa espressione si chiama la derivata variazionale di I. La derivata variazionale
F/(x) di un funzionale F[] `e, per denizione, il coeciente di (x) nellespressione
della variazione prima F
F =
_
F
(x)
(x) d
4
x
Se F dipende dalle derivate di (x), come nel caso dellazione, il calcolo della derivata
variazionale comporta in generale una o pi` u integrazioni per parti. Per calcolare la derivata
variazionale di I[] si noti che
I =
_ _
L
A
+
L
A
_
d
4
x (1.2)
Possiamo scegliere variazioni arbitrarie a supporto compatto (cio`e nulle al di fuori di un
insieme chiuso e limitato). In tal caso, integrando per parti il secondo termine e usando
il teorema di Gauss per eliminare il termine di bordo, si ottiene facilmente
I =
_ _
L
a
L
A
_
A
d
4
x (1.3)
La condizione di stazionariet`a (1.1) prende allora la forma
I
A
(x)
L
A
(x)
a
L
A
(x)
= 0 (1.4)
Queste sono le equazioni di Eulero e Lagrange per i campi. Si noti che la condizione
L
(x) = L(
1
(x a)) rende lazione invariante
I[
] =
_
L
(x)d
4
x = I[]
Le equazioni del moto per
, I/
= 0, sono allora identiche a quelle per , I/ = 0.
La Lagrangiana `e determinata solo parzialmente dalle equazioni del moto di una teoria,
perche il passaggio da L(x) a
L
1
(x) = L(x) +
a
F
a
(x)
non modica le equazioni del moto. Questo si pu`o vedere direttamente sostituendo L
1
(x)
nelle equazioni di Eulero-Lagrange, oppure notando che la divergenza non contribuisce
alla variazione dellazione, se si usa il teorema di Gauss per eliminarla dal principio
variazionale.
campo scalare
65
Un semplice esempio del formalismo Lagrangiano `e fornito dalla teoria del campo scalare.
Una Lagrangiana invariante `e
L(x) =
1
2
a
U() =
1
2
1
2
||
2
U() (1.5)
dove U() `e una funzione potenziale. Nellultima espressione, il primo termine `e lanalogo
dellenergia cinetica e il secondo `e richiesto dalla covarianza relativistica (il primo termine
da solo non `e invariante di Lorentz). Conviene isolare da U() il termine quadratico,
U() =
1
2
m
2
2
+V ()
La costante m `e una massa in unit`a con = c = 1; nelle unit`a comuni si dovrebbe fare la
sostituzione m mc/. Le equazioni di Eulero-Lagrange sono
a
+m
2
=
dV ()
d
e si riducono allequazione di Klein-Gordon se manca il potenziale. In questo caso
lequazione ammette le onde piane
= Aexp(ip
a
x
a
)
dove p
2
+ m
2
= 0. Questa `e la formula soddisfatta dal quadrimpulso di una particella,
ed `e in accordo con la teoria quantistica, secondo la quale londa piana `e associata alle
particelle con impulso ed energia determinati, e che per tale motivo sono completamente
delocalizzate.
6.2 Azione per il campo elettromagnetico
Le equazioni di Maxwell sono del primo ordine nei campi elettromagnetici e del secondo
ordine nei potenziali A
a
, e quindi considereremo le componenti del campo A
a
(x) come
le variabili dinamiche della teoria (le sue coordinate generalizzate, come si direbbe nel
linguaggio Lagrangiano).
`
E dunque essenziale che lazione sia invariante di gauge, oltre
che invariante di Lorentz.
Esistono due invarianti quadratici che si possono costruire con il tensore F
ab
. Essi sono
F
2
F
ab
F
ab
= 2(B
2
E
2
) (2.1)
e
F
ab
F
ab
= 2E B (2.2)
dove
F
ab
=
1
2
e
abcd
F
cd
`e il cosiddetto tensore duale. Il secondo invariante `e una divergenza
F
ab
F
ab
=
a
_
e
abcd
F
bc
A
d
_
66
e pu`o quindi essere omesso. Il primo ha i requisiti necessari per essere usato come una
Lagrangiana, e dunque scriviamo lazione
I
em
=
1
16
_
F
ab
F
ab
d
4
x (2.3)
Il segno negativo si capisce guardando la (2.1), secondo la quale F
2
contiene le derivate
temporali di A (cio`e lenergia cinetica del campo) con segno negativo. Il fattore di nor-
malizzazione `e dovuto alla nostra scelta di usare le unit`a Gaussiane non razionalizzate.
Dato che I
em
non contiene le cariche elettriche, si pu`o interpretare I
em
come lazione per
il campo elettromagnetico libero.
Dalle equazioni di Maxwell (1.6) segue che lazione deve anche contenere il termine lineare
in A
a
1
I
in
=
_
A
a
J
a
d
4
x (2.4)
dove J
a
`e la corrente elettrica, che assumeremo indipendente dal campo A
a
(x).
`
E I
in
invariante di gauge? La sostituzione A
a
A
a
+
a
trasforma I
in
in
I
in
+
_
a
J
a
d
4
x = I
in
_
a
J
a
d
4
x
come segue dal teorema di Gauss se si annulla allinnito. Vediamo che lazione `e inva-
riante di gauge se e solo se la corrente `e conservata:
a
J
a
= 0. Si pu`o quindi considerare
la conservazione della carica elettrica come una conseguenza dellinvarianza di gauge.
Sia inne I
m
lazione che descrive la materia elettricamente carica, che assumeremo
indipendente dal campo A
a
(x). Lazione completa `e
I =
1
16
_
F
ab
F
ab
d
4
x +
_
A
a
J
a
d
4
x +I
m
(2.5)
`
E adesso facile vedere che le equazioni di Eulero-Lagrange per il potenziale A
a
(x) ri-
producono la seconda coppia delle equazioni di Maxwell (si ricordi che la prima coppia
segue direttamente dalla denizione (1.1)). Forse, pi` u semplicemente, si pu`o vericare la
formula
I =
_ _
1
4
a
F
ab
+J
b
_
A
b
d
4
x
da cui seguono le equazioni, purche si considerino le variazioni A
b
come arbitrarie e
indipendenti tra loro.
6.3 Azione per le particelle
Lazione I
m
non `e altrettanto univocamente determinata, perche ovviamente dipende
dal modello di materia che si vuole adottare, e anche dal sistema sico concreto che si
vuole considerare. Ad esempio un uido elettricamente carico, uno sciame di particelle
1
In certe teorie vi possono essere accoppiamenti quadratici nei potenziali, essenzialmente dovuti al
fenomeno del diamagnetismo.
67
puntiformi o un campo scalare complesso hanno tutti la propria azione particolare. Per gli
scopi dellelettrodinamica classica `e giusticato considerare le particelle puntiformi come
un modello sucientemente adeguato. Vale allora la formula (2.5), che sostituita in I
in
d`a immediatamente
I
in
=
n
e
n
_
A
a
(z
n
)dz
n
ciascun integrale essendo esteso alla linea di universo della carica corrispondente. Per
quanto riguarda lazione libera (il termine I
m
della (2.5)), se le particelle hanno massa
non nulla si pu`o adottare lazione
2
I
m
=
n
m
n
_
_
z
2
n
dp =
n
m
n
_
d
n
=
n
m
n
_
dt
_
1 v
2
n
(3.1)
Si passa dalla prima forma alla seconda ponendo p =
n
, nel qual caso z
2
n
= 1, e dalla
seconda alla terza usando la nota espressione d = dt
1 v
2
. Si noti che la Lagrangiana
per una particella
L = m
1 v
2
= m+
1
2
mv
2
+
fornisce la quantit` a di moto
p =
L
v
=
mv
1 v
2
e lenergia
E = v
L
v
L =
m
1 v
2
in accordo con la denizione di queste grandezze adottata in meccanica relativistica.
Limitandosi ad una sola particella, la variazione di I
m
rispetto a z
a
si pu`o scrivere nella
forma
I
m
= m
_
d
2
z
a
d
2
z
a
d (3.2)
e
I
in
= e
_
F
a
b
(z)
dz
b
d
z
a
d
Dal principio variazionale I = 0, con il potenziale A
a
tenuto sso, si ottengono cos` le
equazioni del moto della carica nel campo elettromagnetico
dp
a
d
= eF
a
b
(z)u
b
, u
a
=
dz
a
d
(3.3)
dove, come al solito, p
a
= mu
a
`e il quadri-impulso della particella. Queste equazioni sono
manifestamente covarianti. Riscrivendole per esteso si ha
d
dt
_
mv
1 v
2
_
= e(E +v B) (3.4)
2
z = dz/dp, z
2
= z
a
z
a
e m
n
sono le masse proprie.
68
d
dt
_
m
1 v
2
_
= eE v (3.5)
e ritroviamo le equazioni del moto (4.4). Vediamo che la trattazione relativistica conduce
necessariamente alla formula della forza di Lorentz, che nelle vecchie trattazioni era invece
semplicemente postulata.
6.4 Il tensore energia-impulso
Lindipendenza della Lagrangiana dalle coordinate ha una importante conseguenza di
principio, il teorema di conservazione del quadri-impulso.
6.4.1 Caso generale
Se L(x) non dipende esplicitamente
3
da x
a
, si ha
a
L =
L
A
+
L
A
=
_
L
b
L
A
_
A
+
b
_
L
A
_
Se le equazioni di Eulero-Lagrange risultano soddisfatte, questa equazione si riduce alle
quattro condizioni
a
T
a
b
= 0 (4.1)
in cui
T
a
b
=
a
b
L
L
A
(4.2)
T
a
b
si chiama il tensore energia-impulso canonico, e lEq. (4.1) `e la sua legge di con-
servazione. Dal teorema di Gauss (2.8) si ottengono le costanti del moto (ripristinando
c)
P
a
=
1
c
_
T
0
a
(x
0
, x)d
3
x,
dP
a
dx
0
= 0 (4.3)
Queste rappresentano il quadrimpulso del campo sulliperpiano a x
0
ssato. Per esempio
T
0
0
=
0
A
L
A
L (4.4)
`e manifestamente la densit`a di energia
4
, e dunque cP
0
`e lenergia, in accordo con le
propriet`a generali del quadrimpulso.
`
E molto importante osservare che le grandezze P
a
sono non solo conservate, ma determinano anche le componenti di un quadrivettore (v.
appendice). Per nire, notiamo che in generale il tensore canonico non `e simmetrico,
perci`o deniamo
T
ab
= T
a
c
cb
3
Cio`e se vale la (0.2) con = 1, tenendo conto che
(x) = (x a).
4
Si ricordi che L `e una densit`a Lagrangiana, e che la formula per lenergia in una teoria con Lagrangiana
L `e E = qL/ q L.
69
ambiguit` a di T
ab
La non univocit`a della Lagrangiana si riette ovviamente sulla forma del tensore T
a
b
.
Oltre a questo per`o, esiste anche unambiguit`a di carattere pi` u profondo che vogliamo ora
descrivere. Si consideri il nuovo tensore energia-impulso
1
T
a
b
= T
a
b
+
c
F
ac
b
, F
ac
b
= F
ca
b
(4.5)
dove F
ac
b
`e una funzione tensoriale dei campi, antisimmetrica in a e c. Allora la legge
di conservazione (4.1) rimane valida. Dal teorema di Gauss segue che il quadrimpulso
totale non cambia se F
ac
b
(x) si annulla in maniera talmente rapida da annullare il suo
usso attraverso i bordi allinnito. La possibilit`a di ridenire il tensore energia-impulso
in questo modo non `e un fatto deprecabile, perche pu`o utilmente essere usata per renderlo
simmetrico: T
ab
= T
ba
, propriet`a che assumeremo valida da ora in poi. In questo caso, il
tensore del momento angolare
M
abc
= T
ab
x
c
T
ac
x
b
risulta anchesso conservato
a
M
abc
= T
cb
T
bc
= 0 (4.6)
Le costanti del moto
J
ab
=
_
M
0ab
(x
0
, x)d
3
x = M
ba
(4.7)
rappresentano la versione relativistica del momento angolare. Un altro caso dove la non
univocit`a del tensore energia-impulso risulta essenziale, si ha per il campo elettromagne-
tico, dove pu`o essere impiegata per ripristinare linvarianza di gauge, apparentemente
violata dal tensore canonico.
signicato delle componenti di T
ab
Abbiamo gi`a notato che T
00
`e la densit`a di energia e c
1
T
0k
G
k
la densit`a della quantit`a
di moto. Integrando la legge di conservazione
0
T
00
=
k
T
k0
su un volume spaziale V si ottiene (ripristinando c)
dE
V
dt
=
d
dt
_
V
T
00
dx = c
_
V
T
k0
n
k
da
dove E
V
`e lenergia nel volume V . Quindi le componenti cT
k0
S
k
rappresentano il usso
di energia nella direzione k (x, y oppure z). Analogamente, dalla legge di conservazione
della quantit`a di moto in un volume V
dP
k
V
dt
=
d
dt
1
c
_
V
T
0k
dx =
_
V
T
jk
n
j
da
vediamo che le componenti T
jk
rappresentano il usso della k-esima componente dellim-
pulso nella j-esima direzione. Le T
jk
sono a volte chiamate le componenti del tensore
70
degli sforzi, perche il usso di impulso attraverso una supercie determina la forza agente
sulla medesima.
Come sopra, sia G il vettore (tridimensionale) di componenti c
1
T
0k
e S quello di com-
ponenti cT
k0
. Se il tensore energia-impulso `e simmetrico si ha, dunque
G =
1
c
2
S (4.8)
un risultato noto come teorema di Planck: ad ogni corrente di energia `e associato un tra-
sporto di quantit` a di moto. La (4.8) `e una versione generalizzata del teorema di equivalenza
massa-energia.
Consideriamo ora il tensore energia-impulso di alcuni sistemi sici importanti.
6.4.2 Campo scalare
La Larangiana (1.5) e la (4.2) conducono subito alla formula
T
ab
=
a
b
+
ab
L
Ad esempio, se il campo `e spazialmente uniforme, cio`e se (x) = (t), il tensore degli
sforzi `e isotropo (includiamo il termine di massa in V ())
T
jk
=
1
2
jk
_
2
V ()
_
=
jk
p
Il coeciente di
jk
pu`o essere interpretato come la pressione (v. sotto). Inoltre T
0j
= 0
e lenergia
T
00
= =
1
2
2
+V ()
Si noti che il tensore `e simmetrico, T
ab
= T
ba
. Nel caso generale la densit`a di impulso `e
G =
6.4.3 Campo elettromagnetico
La denizione (4.2) applicata alla Lagrangiana del campo elettromagnetico libero
L =
1
16
F
ab
F
ab
determina il tensore canonico
T
a
b
=
1
4
_
F
ac
b
A
c
1
4
F
nm
F
nm
a
b
_
(4.9)
che, come si pu`o vedere, non `e invariante di gauge. Sfruttando larbitrariet`a (4.5),
sommiamo la quadri-divergenza
1
4
c
(F
ac
A
b
)
71
Usando le equazioni del moto
c
F
ac
= 0 si ottiene il tensore invariante di gauge
T
a
b
=
1
4
_
F
ac
F
bc
1
4
F
nm
F
nm
a
b
_
(4.10)
Esplicitandone le componenti troviamo la densit`a e il usso di energia (anche uguale alla
densit`a di impulso G)
T
00
=
1
8
(E
2
+B
2
), S =
1
4
(E B) (4.11)
e il tensore degli sforzi di Maxwell
T
ik
=
1
4
_
E
i
E
k
+
1
2
ik
E
2
B
i
B
k
+
1
2
ik
B
2
_
(4.12)
Osserviamo che il quadrimpulso elettromagnetico
P
a
=
_
T
0
a
(x
0
, x)dx
non pu`o essere un vettore di tipo spaziale, perche in tal caso sarebbe possibile annullare P
0
con una trasformazione di Lorentz. Ma questo comporta lannullarsi dei campi. Dunque
P
2
0, ossia
|P| P
0
=
E
c
, E =
1
8
_
(E
2
+B
2
) dx
Valgono le formule di trasformazione
P
x
=
P
x
(v/c
2
)E
_
1
2
, P
y
= P
y
, P
z
= P
z
, E
=
E vP
x
_
1
2
(4.13)
Se P
2
= 0 e se `e langolo, misurato in F, tra la direzione di propagazione del raggio di
luce e la velocit`a di F
rispetto a F, otteniamo dalla (4.13) la formula di Einstein
E
=
1 cos
_
1
2
E
Se invece P
a
`e di tipo tempo, P
2
< 0, esiste sempre un sistema di coordinate F
0
in cui
P
0
= 0. Se E
0
`e il valore dellenergia totale in F
0
, segue dalle (4.13) che in F
E =
E
0
_
1
2
, P =
v
c
2
E
dove v `e la velocit`a di F
0
rispetto ad F. Un esempio di questo caso `e unonda sferica di
spessore nito.
Se `e la supercie di un dielettrico con normale esterna n, la forza esercitata dal campo
sullelemento di supercie d `e
df
i
= T
ik
n
k
d
72
Per questo a volte `e il tensore
ik
= T
ik
ad essere chiamato tensore degli sforzi elettro-
magnetici. Si dovrebbe anche osservare che la traccia si annulla
ab
T
ab
= 0
ma sul signicato di questa equazione non ci addentriamo. Il tensore (4.10) soddisfa alla
legge di conservazione (4.1) (o, come si usa dire, `e conservato), solo in assenza di correnti
e cariche. Calcolando la divergenza del tensore e usando le equazioni di Maxwell, si trova
infatti la formula importante
a
T
ab
= F
b
c
J
c
(4.14)
La componente temporale `e lequazione del bilancio energetico
T
00
t
+ div S = E J
dove S = E B/4 `e il vettore di Poynting, cio`e le componenti T
k0
del tensore energia-
impulso. Le rimanenti equazioni esprimono la densit`a della forza di Lorentz attraverso la
divergenza di un tensore.
6.4.4 Fluido perfetto
Lidrodinamica relativistica presenta un interesse di principio, perche dovrebbe essere
applicata non solo quando `e relativistica la velocit`a macroscopica del uido, ma anche
quando `e tale la velocit`a microscopica delle particelle nel uido. Sia = mn
0
la densit`a
di massa del uido, dove n
0
rappresenta il numero di particelle per unit`a di volume proprio
del uido ed m `e la massa propria delle particelle. Se `e lenergia interna per unit`a di
massa e s lentropia per unit`a di massa, la ben nota relazione termodinamica (valida nel
sistema di coordinate dove un elemento di volume del uido `e in quiete)
d = Tds +
p
2
d (4.15)
mostra che se il moto del uido `e isoentropico, ds = 0, si possono considerare e p come
funzioni univoche di . Lenergia interna e la pressione sono allora
= +(), p =
2
d
d
La condizione ds = 0 si pu`o scrivere nella forma
d
_
+p
dp = Tds = 0 (4.16)
Faremo uso di questa relazione in seguito. Determiniamo ora il tensore energia-impulso
del uido isoentropico (o perfetto). Nel sistema di coordinate dove un elemento di volume
del uido `e in quiete, la forza per unit`a di supercie che il uido esercita sul bordo
dellelemento vale pn, dove n `e la normale esterna e p `e la pressione idrostatica (legge di
Pascal). Inoltre T
0j
= 0, perci`o il tensore energia-impulso ha la forma
0
T
ab
=
_
_
_
_
0 0 0
0 p 0 0
0 0 p 0
0 0 0 p
_
_
_
_
(4.17)
73
Lunico tensore che nel sistema di quiete si riduce a
0
T
ab
`e
T
ab
= ( +p)u
a
u
b
+p
ab
(4.18)
dove u
a
`e il campo di quadrivelocit`a del uido. Per le componenti abbiamo (ripristinando
c)
T
00
=
+pv
2
/c
2
1 v
2
/c
2
, T
0i
=
( +p)v
i
/c
1 v
2
/c
2
, T
ij
=
+p
1 v
2
/c
2
v
i
v
j
c
2
+p
ij
Si noti lidentit`a u
a
T
ab
= u
b
. La traccia `e
T
a
a
= 3p (4.19)
Gli autovalori del tensore degli sforzi, cio`e le pressioni principali, non sono necessariamente
positivi. Ad esempio, per un campo magnetico lungo x, B
y
= B
z
= 0, si ha
T
ab
=
_
_
_
_
0 0 0
0 0 0
0 0 0
0 0 0
_
_
_
_
dove = B
2
/8 `e la densit`a di energia. Una pressione negativa (tensione) agisce lungo x.
(a) limite non relativistico
Nel trattare il limite non relativistico non `e suciente ignorare i termini di ordine v/c
o superiori. Bisogna infatti notare che contiene lenergia di quiete c
2
, dove = mn
o
`e la densit`a di massa propria delle particelle del uido, mentre la densit`a di massa non
relativistica si riferisce allunit`a di volume in movimento con il uido. Si deve dunque
porre
=
0
_
1
v
2
c
2
=
0
0
v
2
2c
2
+
e poi passare al limite c , dove
0
`e la densit`a di massa non relativistica usuale.
Inoltre sia la pressione che lenergia interna () sono trascurabili rispetto allenergia di
quiete c
2
. In questo modo si ottengono le formule
T
00
o
c
2
=
1
2
0
v
2
+
0
c
1
T
0j
=
0
v
j
T
jk
=
0
v
j
v
k
+p
jk
Il usso di energia `e cT
j0
, e vale
S
0
c
2
v =
0
_
+
p
0
+
v
2
2
_
v
Queste espressioni coincidono con i risultati della meccanica dei uidi non relativistica
(v. Cap. [1] del testo di L. D. Landau e E. M. Lifshitz, Fluid Mechanics: Volume 6 (Course
of Theoretical Physics), Butterworth-Heinemann, Second Edition, (1987))
74
(b) equazioni del moto
Lequazione di conservazione
a
T
ab
= 0
contiene le equazioni del moto relativistiche del uido. Infatti, derivando il tensore si
ottiene
( +p)u
b
u
a
x
b
+u
a
( +p)u
b
x
b
=
p
x
a
(4.20)
Contraendo con u
a
si ottiene la formula
a
(( +p)u
a
)) = u
a
a
p (4.21)
e quindi lequazione del moto prende la forma
( +p)u
b
u
a
x
b
=
p
x
a
u
a
u
b
b
p (4.22)
e nel limite non relativistico si riduce alle ben note equazioni di Eulero. Dobbiamo ancora
imporre la condizione che il moto sia isoentropico. Riscriviamo la (4.21) nella forma
u
a
a
_
+p
u
a
a
p +
+p
2
a
(u
a
) = 0 (4.23)
Dalla (4.16) si vede che i primi due termini si elidono, e si ottiene lequazione di continuit`a
(u
a
)
x
a
= 0 (4.24)
Se invece assumiamo lequazione di continuit`a la (4.23) diventa
u
a
a
_
+p
u
a
a
p = 0
che `e equivalente alla condizione Tu
a
a
s = 0. Introducendo lentropia per unit`a di
volume, = s, e usando nuovamente la (4.24) si ottiene lequazione di continuit`a per la
corrente di entropia
a
u
a
x
a
= 0
6.4.5 Particelle libere
Lenergia di una particella libera `e p
0
= m = m/
1 v
2
, e la quantit`a di moto `e
p
j
= mv
j
= mv
j
/
1 v
2
, quindi la densit`a di energia di un sistema di particelle `e
T
00
(x) =
n
m
n
_
1 v
2
n
(3)
(x z
n
(x
0
)) =
n
_
(4)
(x z
n
(p)) p
0
n
dz
0
n
(4.25)
e la densit`a della quantit`a di moto `e
T
0j
=
n
m
n
v
j
n
_
1 v
2
n
(3)
(x z
n
(x
0
)) =
n
_
(4)
(x z
n
(p)) p
j
n
dz
0
n
(4.26)
75
Come abbiamo spiegato, il usso di energia `e
T
j0
=
n
m
n
v
j
n
_
1 v
2
n
(3)
(x z
n
(x
0
)) =
n
_
(4)
(x z
n
(p)) p
0
n
dz
j
n
(4.27)
e siccome p
j
n
dz
0
n
= p
0
n
dz
j
n
, vediamo che T
0j
= T
j0
. Inne, dalla (4.26) segue la formula
per il usso di quantit`a di moto
T
kj
=
n
m
n
v
j
n
_
1 v
2
n
(3)
(x z
n
(x
0
))v
k
n
=
n
_
(4)
(x z
n
(p)) p
j
n
dz
k
n
(4.28)
Le formule scritte sono le componenti del tensore
T
ab
(x
0
, x) =
n
p
a
n
v
b
n
(3)
(x z
n
(x
0
)) (4.29)
dove v
a
n
= dz
a
n
/dx
0
. Come sopra possiamo usare un parametro invariante e scrivere
T
ab
(x) =
n
_
dp
(4)
(x z
n
(p)) p
a
n
dz
b
n
dp
(4.30)
dove p
a
n
`e il quadrimpulso considerato come una funzione di p (e non m
n
dz
a
n
/dp). Per la
traccia si ottiene, usando per esempio la (4.29)
T =
n
m
m
_
1 v
2
n
(3)
(x z
n
(x
0
)) (4.31)
La media spaziale sullunit`a di volume `e negativa
_
T dx =
n
m
m
_
1 v
2
n
< 0
Calcoliamo la divergenza del tensore energia-impulso nei due casi seguenti: (a) le particelle
si muovono sotto lazione di un campo elettromagnetico, (b) le particelle sono libere
eccetto che per occasionali collisioni localizzate. Nel caso (a) si ha, usando per convenienza
la (4.30) con p =
n
,
a
T
ab
(x) =
n
_
d
n
(4)
(x z
n
(
n
))
dp
b
n
d
n
=
=
n
e
n
_
d
n
(4)
(x z
n
(
n
)) F
b
c
(z
n
)u
c
n
= F
b
c
(x)J
c
(x) (4.32)
Se F
ab
= 0 il tensore `e conservato e il quadrimpulso p
n
`e costante. Nel caso (b) supponiamo
che le particelle n e m abbiano una collisione a
n
=
m
=
c
: allora
dp
n
d
n
= p
n
(
n
c
),
dp
m
d
m
= p
m
(
m
c
)
dove p
n
(p
m
) `e la variazione di quadrimpulso della particella n (m) nella collisione.
Allora
a
T
ab
(x) =
n
_
d
n
(4)
(x z
n
(
n
))
dp
b
n
d
n
=
(4)
(x z(
c
))(p
b
n
+p
b
m
)
76
dove z(
c
) = z
n
(
c
) = z
m
(
c
) `e il punto dove avviene la collisione. Vediamo che la conser-
vazione di T
ab
`e equivalente alla legge di conservazione del quadrimpulso nelle collisioni.
Il caso con pi` u collisioni si generalizza facilmente.
Le equazioni (4.14) e (4.32) danno le leggi di conservazione per un sistema chiuso di
cariche e campi
a
_
T
ab
em
+T
ab
mat
_
= 0 (4.33)
77
Capitolo 7
Teoria della gravitazione
La relativit`a ristretta `e basata sullassunzione della completa equivalenza di tutti i sistemi
di riferimento inerziali.
`
E certamente insoddisfacente, anche da un punto di vista episte-
mologico, che non tutti i sistemi siano considerati completamente equivalenti, o almeno
che non si dia una ragione logica per non considerarli tali. Questo difetto `e rimosso dalla
teoria della relativit`a generale, oggetto di questo corso. La relativit`a generale `e la teoria di
spazio, tempo e gravitazione formulata da Einstein nel 1915. Essa `e largamente considera-
ta come una teoria matematica astrusa, e infatti solitamente si insegna solo alluniversit`a.
Il linguaggio matematico naturale della teoria `e la geometria dierenziale delle variet`a lo-
rentziane, variet`a che ammettono una metrica con tre autovalori positivi e uno negativo,
e che non possiedono, in generale, la struttura di spazio vettoriale comunemente associata
allo spazio-tempo di Minkowski. La connessione di queste strutture matematiche con la
sica `e dovuta al genio di Einstein, e ridotta ai minimi termini `e la seguente: una variet` a
del tipo indicato rappresenta un possibile spazio-tempo continuo e la metrica ne descrive
allo stesso tempo la struttura causale, le propriet` a geometriche e il campo gravitazionale
che, come sappiamo dai tempi di Newton, dipende dalla presenza della materia.
Perci`o il campo metrico non dovrebbe essere dato a priori (come in relativit`a ristretta), ma
essere determinato dalle sorgenti del campo. Insomma, la geometria dello spazio-tempo `e
dinamica! Il fondamento sico di questa teoria, certamente straordinaria, `e la propriet`a
che hanno i campi gravitazionali di interagire in maniera universale con tutte le forme di
materia, inclusa la radiazione.
7.1 Il principio di equivalenza
Ref. [1] S. Weinberg, Gravitation and Cosmology: principles and applications of the general
theory of relativity, John Wiley & sons, Inc. (1972), Cap. [3].
Il principio di equivalenza coincide essenzialmente con losservazione che in una navicella
spaziale sucientemente piccola e in caduta libera gli eetti del campo gravitazionale
sono trascurabili. Questo segue generalizzando ai campi arbitrari la scoperta di Galileo
secondo la quale, nel campo di gravit`a terrestre, tutti i pesi cadono con la stessa acce-
lerazione. Dalla seconda legge del moto si conclude allora che la forza gravitazionale `e
proporzionale alla massa del peso, e dalla terza legge che `e anche proporzionale alla massa
della sorgente (la terra, nel caso in esame). Non occorre dunque distinguere la massa gra-
78
vitazionale passiva, che determina lintensit`a della forza di gravit`a, dalla massa inerziale
che compare nella seconda legge del moto. Se indichiamo questultima con m
I
, e con m
G
la massa gravitazionale passiva tale che F = m
G
g
, le osservazioni di Galileo comporta-
no leguaglianza m
G
= m
I
. Se non fosse esattamente cos`, laccelerazione impartita dal
campo gravitazionale
a =
_
m
P
m
I
_
g
, g
9.81 cm sec
2
non sarebbe la stessa per tutti i pesi. Esperimenti mediante pendoli fabbricati con materia-
li diversi furono eseguiti da Newton, Bessel e Potter, senza rivelare dierenze signicative.
Il primo esperimento di precisione `e di Eotvos (1889, 1922), secondo il quale per molte
coppie di sostanze (A, B) si ha il limite
_
m
I
m
P
_
A
_
m
I
m
P
_
B
10
9
(1.1)
Misure pi` u recenti di Dicke, Roll, Krotkov (1964) e Braginsky (1972), hanno portato
la precisione a 10
11
e un recente esperimento a Washington (1994, 1999) addirittura a
10
13
! (si visiti il sito http://relativity.livingreviews.org/ per un aggiornamento scritto da
C. Will
1
).
Alluguaglianza m
G
= m
I
si pu`o dare la seguente importante interpretazione, suggerita
dallo stesso Einstein. Sia K
un sistema accelerato rispetto al sistema inerziale K, con
accelerazione g: in K
`e allora presente un campo gravitazionale uniforme con acce-
lerazione g
= g. Infatti losservatore in K
osserva una forza inerziale m
I
g
che `e la
stessa per tutti gli oggetti materiali, e uguale alla forza peso m
G
g
. Si pu`o estendere
allora il principio di relativit`a almeno ai sistemi non relativistici uniformemente accelerati,
perche il moto delle particelle libere in tali sistemi non pu`o essere usato per determinare
laccelerazione del riferimento: si pu`o tranquillamente attribuire il moto accelerato delle
particelle a un campo gravitazionale. Si pu`o anche dire che il passaggio a un sistema di
riferimento accelerato genera un campo di forze inerziali che, dal punto di vista meccanico,
`e del tutto indistinguibile da un campo gravitazionale
2
. Pi` u in generale,
A. la transizione da un sistema di coordinate a un altro, arbitrariamente ac-
celerato rispetto al primo, non pu`o essere sicamente distinta da un cambia-
mento del campo gravitazionale. Non si dovrebbe quindi assumere lesistenza
di sistemi di coordinate privilegiati.
Abbiamo appena visto che un campo uniforme pu`o essere generato passando a un oppor-
tuno sistema di riferimento. Ma se un arbitrario cambiamento di coordinate corrisponde
a una variazione del campo gravitazionale, forse con tale cambiamento `e possibile anche
eliminare un campo, almeno localmente.
Infatti, la scoperta di Galileo che tutti i pesi cadono con la stessa accelerazione implica
immediatamente che in un sistema di riferimento in caduta libera il campo gravitazionale
1
Il pi` u recente aggiornamento `e in http://babbage.sissa.it al riferimento gr-qc/0510072
2
Quali siano le sorgenti di questo campo `e un problema che ha grande importanza concettuale, ma
nel quale preferiamo non addentrarci.
79
non pu`o essere rivelato, perche losservatore, i suoi strumenti e il sistema stesso, accelerano
tutti allo stesso modo. Ovviamente questo elimina il campo solo in una piccola regione
spaziale e se non si aspetta troppo a lungo: ad esempio, dato che le linee di forza del campo
terrestre convergono verso il centro della terra, due palline in caduta libera niranno
sistematicamente per avvicinarsi, cio`e vi sar`a una piccola accelerazione relativa.
Per lo spazio-tempo di un campo gravitazionale arbitrario, dunque, assumeremo valido il
seguente principio euristico
3
, detto il principio di equivalenza forte, secondo il quale:
B. In un intorno sucientemente piccolo di ogni evento p, esiste un sistema
di coordinate X
a
, che chiameremo localmente inerziale in p, rispetto al quale le
leggi siche assumono la forma che hanno nella teoria della relativit`a ristretta
in assenza di gravitazione.
In particolare, in ogni punto `e denito un intervallo spazio-temporale che nelle coordinate
X
a
assume con grande approssimazione (poiche in generale il campo non `e uniforme n`e
costante) la forma canonica della relativit`a ristretta
ds
2
=
ab
dX
a
dX
b
(1.2)
dove
ab
`e la metrica di Minkowski. Le coordinate X
a
sono determinate a meno di tra-
sformazioni di Lorentz, X
a
a
b
X
b
, perche queste formano il gruppo di simmetria della
metrica di Minkowski. Una teoria che si fonda su tale principio `e dunque localmente
invariante di Lorentz. Si noti che luguaglianza delle masse inerziale e gravitazionale im-
plica il principio di equivalenza solamente per le equazioni del moto, mentre in [B] se ne
aerma la validit`a per tutte le leggi naturali. Per questa ragione si distingue un principio
di equivalenza forte da un principio di equivalenza debole, questultimo valido solo per le
leggi del moto.
`
E facile capire che una teoria basata su questo principio deve abbandonare
la relativit`a ristretta: due osservatori distanti in caduta libera accelerano luno rispetto
allaltro, ci`o nonostante osservano le stesse leggi.
7.2 Metrica e gravitazione
Lasserzione [B] contiene due idee notevoli:
si aerma che lo spazio-tempo `e localmente Euclideo, nel senso che ogni punto `e in
un intorno che `e in corrispondenza biunivoca e continua (in una parola, omeomorfo)
con un aperto di R
4
(cio`e ad ogni punto corrispondono quattro coordinate, e la
corrispondenza `e continua e invertibile).
Poi si dice che esiste una metrica Lorentziana
4
, e che le coordinate attorno a p
si possono scegliere localmente inerziali: il prodotto scalare fra due vettori
5
con
origine in p `e (u, v) =
ab
u
a
v
b
(ma solo in p), dove u
a
(v
b
) sono le componenti di u
(v) rispetto alle date coordinate localmente inerziali.
3
Una formulazione maggiormente precisa sar` a data pi` u avanti.
4
Chiamasi Lorentziana una metrica con tre (o n 1 in dimensione n) autovalori positivi e un solo
autovalore negativo.
5
Il concetto di vettore tangente `e denito in appendice.
80
Il primo punto `e uno degli assiomi che deniscono le variet` a dierenziabili, il secondo
punto `e nella denizione di variet`a Riemanniana, se la metrica `e denita positiva, o semi-
Riemanniana nel caso contrario, e lesistenza delle coordinate localmente inerziali `e un
teorema di questa geometria (tranne che in un contesto matematico si chiamano coordinate
normali di Riemann). Vediamo dunque che il linguaggio matematico atto a incorporare
automaticamente il principio di equivalenza, `e quello delle variet`a dierenziabili sulle
quali `e denita una metrica di Lorentz, cio`e un campo di tensori simmetrici di rango due
con tre autovalori positivi e un solo autovalore negativo (v. appendice [A]). Siccome la
denizione di variet`a `e leggermente elaborata, e dato che tale rigore non `e strettamente
richiesto in una trattazione elementare della relativit`a, abbiamo posto la denizione di
variet`a dierenziabile in appendice [A]. Ora vogliamo discutere pi` u in dettaglio come le
variet`a metriche realizzano le idee di Einstein sul campo gravitazionale in modo naturale.
Consideriamo la relativit`a ristretta dal punto di vista di un sistema di coordinate locali
arbitrario, di cui sono funzione le coordinate cartesiane inerziali, X
a
= X
a
(x
b
). Le ma-
trici Jacobiane X
a
/x
b
sono allora invertibili, hanno per inverse le matrici x
a
/X
b
, e
lelemento di linea assume la forma
ds
2
= g
ab
(x)dx
a
dx
b
(2.1)
dove
g
ab
(x) =
cd
X
c
x
a
X
d
x
b
(2.2)
Ricordiamo qui che vale la convenzione di Einstein, secondo la quale si somma sugli indici
ripetuti. Si noti che det g < 0. La metrica inversa `e
g
ab
(x) =
cd
x
a
X
c
x
b
X
d
(2.3)
Pi` u in generale, passando alle coordinate x
a
si ha la formula di trasformazione
g
ab
(x
) =
x
c
x
a
x
d
x
b
g
cd
(x) (2.4)
come segue facilmente dalla (2.1). Non solo la metrica, ma anche i tensori si trasformano
in modo analogo. Ad esempio, per il vettore tangente a una curva si ha
6
dx
a
d
=
x
a
x
b
dx
b
d
Per i vettori si hanno quindi le formule di trasformazione
u
a
=
x
a
x
b
u
a
, u
a
=
x
b
x
a
u
a
(2.5)
dove u
a
= g
ab
u
b
. Insomma, tutto procede come in relativit`a ristretta, eccetto che le
matrici x
a
/x
b
e le loro inverse x
a
/x
b
prendono il posto delle matrici di Lorentz
a
b
.
6
Si usi la formula di derivazione delle funzioni composte.
81
7.2.1 Moto di una particella
Come `e noto dalla relativit`a ristretta, le equazioni del moto di una massa puntiforme
libera seguono dal principio variazionale
_
d = 0, d =
_
g
ab
dx
a
dx
b
_
1/2
in cui la massa `e assente; si ha intanto
_
d =
_ _
g
ab
x
a
dx
b
+
1
2
c
g
ab
x
a
x
c
dx
b
_
=
_ _
d
d
(g
ab
x
a
)
1
2
a
g
bc
x
b
x
c
_
x
a
d = 0 (2.6)
dove
x
a
=
dx
a
d
`e il quadrivettore velocit`a, tangente alla curva e normalizzato: g
ab
x
a
x
b
= 1. Dalla (2.6)
otteniamo le equazioni del moto
d
d
(g
ab
x
a
)
1
2
a
g
bc
x
b
x
c
= 0
Calcolando la derivata
g
ab
x
b
+
c
g
ab
x
c
x
b
1
2
a
g
bc
x
b
x
c
= 0
oppure, simmetrizzando il secondo termine e moltiplicando lequazione per la metrica
inversa,
x
a
+
a
bc
(x) x
b
x
c
= 0 (2.7)
Qui abbiamo introdotto i coecienti di connessione ane, o simboli di Christoel del
secondo tipo,
a
bc
(x) =
1
2
g
ad
(
b
g
dc
+
c
g
bd
d
g
bc
) (2.8)
Le eq. (2.7) esprimono semplicemente lasserzione che rispetto alle coordinate inerziali il
moto libero `e dato dalle equazioni
X
a
= 0, le cui soluzioni, le rette, sono le geodetiche
dello spazio di Minkowski.
Secondo lasserzione [A], il passaggio alle coordinate x
a
ha introdotto un campo gra-
vitazionale, e infatti le (2.7) descrivono un movimento accelerato in cui le forze sono
determinate dai coecienti
a
bc
. Le componenti della metrica g
ab
(x) sono allora lana-
logo dei potenziali. Largomento che ha condotto alle (2.7) `e valido anche in un campo
gravitazionale, solamente che in questo caso sono locali le coordinate inerziali stesse
7
.
7
Cosicche non si potr` a eliminare il campo con ununica trasformazione di coordinate.
82
C. Perci`o interpretiamo le (2.7) come le equazioni del moto di una particella
in un campo gravitazionale, e le componenti della metrica, le dieci funzioni
g
ab
(x), come il campo gravitazionale stesso. Nel sistema x
, esso sar`a descritto
dalle funzioni g
ab
(x
) date dallequazione (2.4).
`
E importante ricordarsi che possiamo eliminare totalmente questo campo semplicemente
ritornando alle coordinate inerziali X
a
. Proprio perche rappresentano le forze gravita-
zionali, i coecienti di connessione non possono trasformarsi come tensori. Passando alle
coordinate x
a
si ha
8
a
bc
(x
) =
x
a
x
b
x
(x) +
x
a
x
2
x
b
x
c
(2.9)
Solo in questo modo, infatti, le equazioni del moto nelle coordinate x
assumono la stessa
forma delle (2.7).
coordinate localmente inerziali
Usando la connessione `e facile costruire in un intorno di ogni punto un sistema di coordi-
nate locali in caduta libera. A tale scopo, sia p un evento e indichiamo con e
a
la matrice
invertibile che diagonalizza la metrica in p,
e
a
e
b
g
ab
(x
p
) =
, e
a
e
b
(x
p
) = g
ab
La trasformazione x X data da
x
a
= x
a
p
+e
b
1
2
a
bc
(x
p
)e
b
e
c
+F
a
(X) (2.10)
dove F `e una funzione liscia che si annulla in p insieme con le derivate prime e seconde,
`e localmente invertibile in un intorno aperto di p, perche
_
x
a
X
_
|p
= e
a
e dunque denisce una trasformazione di coordinate; se indichiamo con g
la
metrica e la connessione nelle nuove coordinate, si ha
g
= 0
ossia
g
= 0
Le coordinate X
sono dunque inerziali in p, e nellintorno dove la (2.10) `e invertibile la
metrica `e costante a meno di termini con derivate seconde della metrica. Come vedremo,
queste sono connesse alla curvatura dello spazio-tempo attraverso il tensore di Riemann.
8
Usando la (2.8) il conto `e un p o tedioso, ma elementare. Un metodo pi` u diretto `e riscrivere le (2.7)
nelle nuove coordinate.
83
Una geodetica uscente da p con vettore tangente u
, nelle coordinate X
ha unespressione
del tipo
X
= u
s +C
s
3
+
con coecienti C
calcolabili; le X
si chiamano coordinate localmente geodetiche in
p. I geometri mostrano che in un intorno di p (che si pu`o prendere convesso), `e possibile
scegliere le funzioni F
(X) tali che le geodetiche uscenti da p siano descritte da funzioni
lineari del parametro ane in tutto lintorno; tali coordinate si chiamano coordinate
normali di Riemann.
metrica e gravitazione
Nel seguito useremo i termini campo metrico e campo gravitazionale come sinonimi,
e si noti che non si tratta solo di una questione terminologica. Studiare un campo gravi-
tazionale o la geometria della metrica Lorentziana che lo rappresenta, sono veramente la
stessa cosa. Si pu`o anche fare la seguente analogia: esplorando lo spazio con cariche elet-
triche ed aghi magnetici si determina il campo elettromagnetico, esplorandolo con regoli
graduati ed orologi si determina il campo metrico, che `e anche il campo gravitazionale.
Ad esempio, provate a studiare la metrica
ds
2
= (1 +gx/c
2
)
2
c
2
dt
2
+dx
2
+dy
2
+dz
2
dove g `e una costante (se fosse g = 0 si avrebbe la metrica di Minkowski, ossia lassenza
di campo). Ecco alcune questioni rilevanti:
1. qual`e il dominio di denizione delle coordinate? Quale di esse rappresenta il tempo?
e perche?
2. come si calcola la metrica inversa? e la connessione
a
bc
(x, y, z)?
3. quali sono le geodetiche nulle e temporali?
4. che propriet`a hanno le curve coordinate x = x
0
> 0, y = z = 0? sono geodetiche?
possiedono accelerazione?
5. quanto vale lintervallo di tempo proprio fra due eventi delle curve?
6. esiste una trasformazione di coordinate che converte il campo nella metrica di
Minkowski: siete capaci di trovarla?
7. `e la supercie x = c
2
/g una singolarit`a del campo? dello spazio-tempo? delle
coordinate?
8. quanto tempo impiega una particella a raggiungere la detta supercie da un punto
qualunque lungo una geodetica? e un raggio di luce?
9. un raggio di luce viaggia dal punto x = x
0
, y = z = 0 al punto x = x
1
, y = z = 0:
quanto tempo coordinato impiega?
10. una sorgente nellorigine, x = y = z = 0, emette un raggio di luce di frequenza
propria che viene rivelato nel punto x = x
1
, y = z = 0: quanto vale la frequenza
propria osservata?
84
11. una particella `e ferma rispetto alle coordinate (t, x, y, z); come si muove rispetto a
un osservatore inerziale? quanto vale laccelerazione?
Si noti il sapore marcatamente geometrico delle domande, nonostante tutte corrispon-
dano, pi` u o meno direttamente, a problemi di sica gravitazionale.
7.2.2 Distanze spaziali e intervalli di tempo
`
E interessante discutere certe restrizioni imposte al sistema di coordinate locali dal carat-
tere Lorentziano della metrica. Fino ad ora non abbiamo specicato quale delle quattro
coordinate debba rappresentare il tempo, perche infatti `e la metrica che determina le
relazioni causali, non le coordinate. Tuttavia `e comodo fare la convenzione che x
0
sia una
coordinata temporale, nel senso che le linee corrispondenti a valori ssi delle rimanenti
coordinate, x
j
= (x
1
, x
2
, x
3
), rappresentano curve temporali
9
. I vettori tangenti a queste
curve sono di tipo tempo e normalizzati
g
ab
u
a
u
b
= 1
e hanno componenti
u
a
=
a
0
(g
00
)
1/2
Infatti, dal carattere temporale delle curve x
j
= x
j
0
, segue che g
00
< 0. Sulla supercie
determinata localmente dalla condizione x
0
costante, tutte le curve sono spaziali (perche
la metrica ha tre autovalori positivi) e quindi la metrica indotta, di componenti g
ij
,
deve essere una matrice denita positiva. Tuttavia questa non determina le distanze
spaziali perche gli eventi con lo stesso valore di x
0
non sono, in generale, simultanei
per gli osservatori che seguono le linee temporali (cio`e che hanno quadrivelocit`a u
a
). In
relativit`a ristretta, la condizione che due eventi con separazione X
a
siano simultanei per
un osservatore con quadrivelocit`a u
a
, `e u
a
X
a
= 0. Poiche dierenze nite di coordinate
curvilinee non deniscono un quadrivettore, mentre dierenze innitesime
10
s`, scriveremo
la condizione di simultaneit`a per eventi vicini
u
a
x
a
= (g
00
)
1/2
g
a0
x
a
= 0 (2.11)
Da questa segue la dierenza di tempo coordinato tra eventi simultanei
g
00
x
0
=
j
x
j
,
j
= g
0j
/
g
00
La distanza `e il valore dellintervallo ds
2
tra eventi simultanei: sostituendo x
0
nella
metrica si ottiene la distanza spaziale
ds
2
= (g
ij
j
)x
i
x
j
=
_
g
ij
+
g
0i
g
0j
g
00
_
x
i
x
j
(2.12)
9
Il fatto che la metrica abbia un autovalore negativo implica che almeno una delle quattro linee
coordinate (una linea coordinata `e una curva lungo la quale una sola coordinata varia) sia una curva
temporale (in inglese, timelike).
10
x
a
=
x
a
x
b
x
b
`e la formula di trasformazione di un vettore.
85
Questa metrica non `e in generale Euclidea. Ad esempio, si consideri la trasformazione di
coordinate (T, R, , Z) (t, r, , z), dove
r = R, = T, z = Z, t = T
e (T, R, , Z) sono coordinate cilindriche nello spazio di Minkowski. Un punto di coor-
dinate (r, , z) si muove rispetto al riferimento inerziale di moto circolare uniforme, con
velocit`a angolare . La semplicit`a della trasformazione t = T `e ingannevole; a causa della
dilatazione relativistica del tempo, gli orologi che segnano il tempo t devono marciare
tanto pi` u rapidamente quanto pi` u sono lontani dallasse di rotazione. La variabile t `e un
esempio di tempo coordinato. La metrica di Minkowski, ds
2
= c
2
dT
2
+dR
2
+R
2
d
2
+dZ
2
,
si trasforma nella metrica di Langevin
ds
2
= (c
2
2
r
2
)dt
2
+ 2r
2
dt d +dr
2
+r
2
d
2
+dz
2
Questo `e il campo gravitazionale che si manifesta rispetto al disco rotante situato nel
piano z = 0. Calcolando la metrica spaziale con la (2.12) si trova
ds
2
= dr
2
+
r
2
d
2
1
2
r
2
/c
2
+dz
2
Da qui vediamo che la circonferenza del cerchio di raggio r, misurata con regoli in quiete
sul disco, `e
L =
2r
_
1
2
r
2
/c
2
> 2r
un risultato che viola la geometria Euclidea! Dal punto di vista dellosservatore inerziale
che vede il disco girare, il fenomeno si spiega osservando che i regoli disposti lungo la
circonferenza appaiono contratti rispetto a quelli disposti lungo un diametro, perche i
primi sono disposti nel senso della velocit`a, che vale r, mentre i secondi sono trasversali
al moto. Losservatore sul disco la pensa diversamente per` o, dato che vede i regoli in
quiete. Tuttavia nota che esiste un campo gravitazionale, e potr`a concludere che leetto
sia dovuto al comportamento dei regoli nel campo di gravit`a. Seguendo Einstein, possiamo
concludere:
D. la geometria sica, o naturale, che si ottiene esplorando lo spazio-tempo
mediante processi di misura con regoli graduati ed orologi
11
, non `e a priori con-
forme agli enunciati della geometria Euclidea, n`e di qualunque altro sistema
assiomatico. Non `e quindi corretto assumere a priori la validit`a di un siste-
ma geometrico assiomatico indipendentemente dalle propriet`a della materia
(inclusa la radiazione).
Per quanto riguarda il tempo, osserviamo soltanto che lintervallo di tempo proprio tra
eventi con identiche coordinate spaziali `e, ovviamente,
d =
_
g
00
(x) dx
0
(2.13)
e dipende dal punto. Per esempio, sulla piattaforma rotante si ha
d =
_
1
2
r
2
/c
2
dt
11
Si usano anche particelle di prova e segnali elettromagnetici.
86
la quale signica che un orologio standard (cos` chiamato per distinguerlo dallorologio
ttizio che indica il tempo coordinato) posto in r ritarda rispetto a un orologio identico
posto nel centro. Come prima, secondo losservatore inerziale il fenomeno `e dovuto alla
dilatazione relativistica del tempo, visto che lorologio posto in r viaggia con velocit`a r
rispetto al sistema inerziale. Losservatore rotante, per`o, vede lorologio in quiete e quindi
interpreta il ritardo come un eetto dovuto al campo gravitazionale della piattaforma
12
. Si
pu`o dunque avere un ritardo degli orologi anche indipendentemente dal loro moto relativo,
un eetto dovuto al campo metrico/gravitazionale che va sotto il nome di spostamento
verso il rosso (o eetto Einstein o anche red shift).
12
Si deve assumere che gli eetti di stress sui materiali dei regoli e degli orologi siano stati
preventivamente determinati e opportunamente corretti.
87
Capitolo 8
Appendici
A Invarianza della fase
Denotiamo con C la cresta donda che `e nellorigine al tempo t = 0. La fase in F `e
F(t, x, y) =
_
t
xcos +y sin
c
_
=
_
t
r
c
_
e si pu`o interpretare come il numero di oscillazioni del campo che si osservano in X = (x, y)
durante lintervallo di tempo che intercorre tra larrivo in X di C e listante t (intervallo
che ammonta a t r/c secondi).
Sia F
un sistema di riferimento in moto relativo uniforme rispetto al sistema assoluto F,
con velocit`a v nella direzione dellasse x, e coincidente con F nellistante t = t
= 0. Sia
X
= (x
, y
) il punto di F
che coincide con X = (x, y) al tempo t
= t: evidentemente il
numero di oscillazioni del campo in X
, contate a partire dal passaggio di C no al tempo
t
= t, coincide con quello determinato in F e determina la fase dellonda in F
(t
, x
, y
) =
_
t
cos
+y
sin
_
Dunque si ha F(t, x, y) = F
(t
, x
, y
). Inoltre (x
, y
) coincide con (x, y) al tempo t
= t,
e quindi si ha la trasformazione di Galilei
x
= x vt y
= y t
= t
Laermazione F(t, x, y) = F
(t
, x
, y
) per ogni trasformazione di Galilei `e precisamente
ci`o che si intende quando si dice che F(t, x, y) `e un invariante del gruppo di Galilei.
B La delta di Dirac
Sia h
n
(x, x
0
) una successione di funzioni tali che
_
h
n
(x, x
0
)dx = 1
lim
n0
_
h
n
(x, x
0
)f(x)dx = f(x
0
) (B.1)
88
dove gli integrali sono estesi alla retta reale. Esempio:
h
n
(x, x
0
) =
_
1
n
e
(xx
0
)
2
/n
Si noti che lim
n0
h
n
(x, x
0
) = 0 se x = x
0
, ma `e innito se x = x
0
, e dunque non
denisce una funzione. Tuttavia il limite (B.1) esiste e denisce un funzionale lineare sullo
spazio delle funzioni f, chiamate in questo contesto funzioni di prova. Questi funzionali
si chiamano distribuzioni, o anche funzioni generalizzate. In accordo con luso che ne fanno
i sici, noi scriveremo (x x
0
) per indicare il funzionale denito dalla (B.1)
(x x
0
) = lim
n0
h
n
(x, x
0
) (B.2)
e scriveremo anche
_
(x x
0
)f(x)dx = f(x
0
) (B.3)
Per`o bisogna ricordarsi che (x x
0
) non `e una funzione e che il signicato preciso della
(B.3) si trova nellEq. (B.1). La funzione generalizzata (x x
0
) si chiama delta di Dirac.
Conviene prendere le funzioni f di classe C
e con supporto compatto (cio`e nulle nel
complementare di un insieme chiuso e limitato). Si pu`o allora denire la derivata di
(x x
0
) integrando per parti
_
(x x
0
)f(x)dx = f
(x
0
) (B.4)
La denizione si pu`o applicare a qualsiasi funzione generalizzata T(x): la derivata T
(x)
`e la funzione generalizzata tale che
_
T
(x)f(x)dx =
_
T(x)f
(x)dx (B.5)
per ogni funzione di prova f(x). Esempio: sia (x) la funzione scalino di Heaviside,
(x) = 1 se x > 0 e (x) = 0 se x < 0. Si ha
_
(x)f(x)dx =
_
0
f(x)dx
e dunque per il teorema fondamentale del calcolo
_
(x)f(x)dx = f(0)
Questo signica che
(x) = (x), un fatto piuttosto intuitivo. Se x = (x
1
, . . . , x
n
) R
n
deniamo
(n)
(x) = (x
1
) (x
n
) (B.6)
Nello spazio di Minkowski avremo
(4)
(x) = (x
0
)(x
1
)(x
2
)(x
3
). Per i nostri scopi, le
principali propriet`a della delta di Dirac sono
1. (x) = (x)
89
2. (ax) = |a|
1
(x)
3. f(x) abbia N zeri semplici x
n
: allora
(f(x)) =
n
1
|f
(x
n
)|
(x x
n
)
4. sia A una matrice non singolare: allora
(n)
(Ax) = | det A|
1
(n)
(x)
5. se `e nel gruppo di Lorentz proprio ortocrono
(4)
(x) =
(4)
(x)
cio`e
(4)
(x) `e uno scalare, invariante per trasformazioni di Lorentz.
Le propriet`a sono tutte conseguenze della formula di trasformazione delle variabili di
integrazione. Ad esempio
_
(n)
(Ax)f(x)d
n
x = | det A|
1
_
(n)
(x)f(A
1
x)d
n
x = | det A|
1
f(0)
da cui segue la quarta propriet`a. Un caso particolare della terza propriet`a `e la formula
(x
2
x
2
0
) =
1
2|x
0
|
((x x
0
) + (x +x
0
)) (B.7)
Una importante rappresentazione integrale discende dalla trasformata di Fourier
f(k) =
_
e
ikx
f(x)dx
La formula di inversione
f(x) =
1
2
_
f(k)e
ikx
dk
implica (lo scambio degli integrali non sarebbe ammesso, ma si pu`o giusticare)
_
dxf(x)
_
dk e
ikx
=
_
dk
_
e
ikx
f(x)dx =
_
dk
f(k) = 2 f(0)
Lultimo passaggio segue dalla formula di inversione. Dunque si ha
(x) =
1
2
_
dk e
ikx
=
1
2
_
dk e
ikx
(B.8)
Lultimo passaggio `e evidente, oppure segue dalla parit`a della delta, secondo cui (x) =
(x).
90
C Funzioni di Green
Le soluzioni dellequazione delle onde inomogenea
a
= j(x)
si ottengono mediante luso delle funzioni di Green; se una distribuzione G(x, y) fosse
nota, tale che
2
G(x, y) = (x y) (C.1)
allora una soluzione particolare dellequazione sarebbe
(x) =
_
G(x, y)j(y)d
4
y (C.2)
`
E facile determinare le possibili funzioni di Green; infatti la formula
G(x, y) = (2)
4
_
e
ik(xy)
k
2
d
4
k (C.3)
determina formalmente una soluzione della (C.1), se non fosse per le singolarit`a del de-
nominatore nei vettori nulli, per cui k
2
= 0. Se consideriamo k
2
come una funzione di
k
0
, il denominatore ha poli semplici nei punti k
0
= |k|, e per dare senso allintegrazione
in k
0
bisogna dunque dare una regola di aggiramento dei poli. A ciascuna prescrizione
corrisponde una diversa funzione di Green. Consideriamo allora la seguente prescrizione:
si spostino i due poli leggermente al di sotto dellasse reale nel piano complesso della
variabile k
0
, cio`e si consideri lintegrale
G
(x, y) = (2)
4
_
e
ik(xy)
(k
0
+i)
2
+ |k|
2
d
4
k = (2)
4
_
e
ik(xy)
k
2
2ik
0
d
4
k (C.4)
dove il limite 0 `e sottinteso e lintegrazione in dk
0
`e fatta per prima. Usando il
teorema di Cauchy si trova facilmente [esercizio]
G
(x, x
) =
1
4|x x
|
(t t
|x x
|) = (t t
)((x x
)
2
) (C.5)
Ci sono due aspetti notevoli in questa formula. Il primo `e lannullarsi di G
quando
levento x precede x
(nel tempo). Per questo G
si chiama la funzione di Green ritardada.
Il secondo `e che il supporto della distribuzione `e interamente contenuto nel cono luce; cio`e
il campo in x `e completamente determinato dal valore della sorgente nei punti x
del suo
supporto che si trovano sul cono luce passato uscente da x, in accordo con la richiesta
di causalit`a e con la propagazione a velocit`a c delle onde. Esiste anche una funzione di
Green avanzata
G
+
(x, x
) =
1
4|x x
|
(t t
+ |x x
|) = (t
t)((x x
)
2
) (C.6)
che si ottiene spostando i poli leggermente al di sopra dellasse reale nel piano complesso
della variabile k
0
, cio`e operando la sostituzione k
2
2ik
0
k
2
+ 2ik
0
nellintegrale
(C.4).
91
campo di una carica
Le equazioni di Maxwell per i potenziali nella gauge di Lorenz sono
2A
a
= 4J
a
,
a
A
a
= 0
Per una sola carica la corrente `e J
a
= e z
a
(t)
(3)
(x z(t)) e dunque, in base alla (C.2), la
soluzione ritardata dellequazione assume la forma
A
a
(x) = e
_
1
|x z(t
)|
z
a
(t)
)
_
t t
|x z(t
)|
_
dt
Il calcolo procede usando la formula (v. il punto (3) della lista nellappendice precedente)
_
t t
|x z(t
)|
_
=
_
1
(x z(t
)) z(t
)
|x z(t
)|
_
1
(t
)
dove t
`e la soluzione per t
dellequazione
t t
|x z(t
)| = 0
Chiameremo t
il tempo ritardato; linterpretazione sica `e ovvia: il campo al tempo
t in x dipende solamente dalla posizione della carica al tempo t
, tale che t t
sia
esattamente il tempo richiesto alla radiazione elettromagnetica per percorrere la distanza
|x z(t
)|. Unultima integrazione in t
fornisce il risultato nale
A
a
(t, x) =
ev
a
(t
)
|x z(t
)| (x z(t
)) z(t
)
, v
a
=
dz
a
dt
(C.7)
Introducendo il quadrivettore nullo R
a
= (t t
, x z(t
)), si pu`o riscrivere la formula
precedente nella forma covariante
A
a
(x) =
eu
a
R
a
u
a
(C.8)
dove u
a
`e la quadri-velocit`a e si sottintende che tutto nel secondo membro va calcolato
nel tempo ritardato t
.
D Testi di Riferimento
Abbreviazioni: RS e RG stanno per relativit`a speciale e generale, rispettivamente. I testi
di base sono tutti altamente raccomandabili, ma ovviamente ciascuno pu`o studiare dove
gli pare e piace.
Le abbreviazioni dei testi sotto indicati, Wei, Sch, LL, Rin, Law, Wil, PP, M, Pau
e Ber, sperabilmente, si commentano da sole.
testi di base
* B. Schutz[3], A First Course in General Relativity. I Cap. [1,2,3,5,6,7,8] coprono
materiale simile al corso, con metodi elementari ma approfonditi (dicili sono i
concetti).
92
* S. Weinberg[4], Gravitation and Cosmology: Principles and Applications of the Ge-
neral Theory of Relativity. Il Cap. [2] ore una sintesi della RS. I Cap. [3,4,5,6,7]
orono le basi della RG. Il libro `e considerato un classico, ed `e eccellente sotto tutti
gli aspetti.
* W. Rindler[5], Introduction to Special Relativity. Trattato elementare ma brillante.
* L. Landau e E. Lifsitz[6], The Classical Theory of Fields. Libro eccellente. I
Cap. [1,2,3,4] discutono la RS e lelettrodinamica, non richiede conoscenze ma-
tematiche sosticate.
testi complementari
* D. F. Lawden[7], Introduction to Tensor Calculus, Relativity and Cosmology.
* C. Will[8], Theory and Experiments in Gravitational Physics.
* W. Panofski & M. Phillips[9], Classical Electricity and Magnetism, Cap. [15,16,17,18].
Il testo di Will si occupa di relativit`a generale. Il PP include un capitolo sulle basi
sperimentali della relativit`a che vale la pena di leggere.
testi datati
Fra i testi datati, i pi` u istruttivi mi sembrano i seguenti:
* C. Mller, The Theory of Relativity, Oxford, 1972.
* W. Pauli, Theory of Relativity, Dover New Ed., 1986.
* P. G. Bergmann, Introduction to the Theory of Relativity, Dover, 1976.
* M. Born, Einsteins Theory of relativity, Dover New Ed., 1962.
Tutti orono punti di vista alternativi e approfondimenti su varie questioni di principio
e dunque possono anche essere considerati come testi complementari. Il libro di Mller
ha una interessante introduzione al quadro storico entro cui si `e sviluppata la teoria della
relativit`a. I due seguenti orono esposizioni molto brillanti della teoria, ma Pauli `e forse
troppo conciso per uno studente alle prime armi. Il libro di Max Born `e indirizzato ai
non esperti, ma ore discussioni interessanti e approfondite dei concetti fondamentali.
E Argomeni da studiare per lesame
In linea di principio tutti gli argomenti discussi nel corso dovrebbero essere studiati. Ma
in pratica, allo scopo di facilitare la preparazione dellesame, si richieder`a molto meno,
come di seguito specicato.
1. Fisica pre-relativistica: il primo capitolo del libro di Mller ore una panoramica
dei problemi che hanno condotto alla relativit`a. Gli studenti dovrebbero avere
unidea delle dicolt`a poste alla teoria delletere dallesperimento di Michelson e
Morley.
93
2. Relativit`a speciale: Schutz, Rindler e/o Landau-Lifschitz vanno tutti bene. Gli
studenti devono sapere la denizione del tempo secondo Einstein, i postulati della
relativit`a, la derivazione delle trasformazioni di Lorentz, la dilatazione del tempo e la
contrazione delle lunghezze, laddizione delle velocit`a, leetto Doppler e la formula
dellaberrazione. Ma anche la denizione del tempo proprio, del moto iperbolico,
dello spazio-tempo, la metrica di Minkowski e tutto lapparato quadri-dimensionale,
il cono luce, i quadri-vettori, ecc. Integrate i vostri appunti sui libri consigliati.
3. Tensori: i tensori si possono studiare sul Schutz, gli studenti devono sapere cosa
sono i tensori e come si trasformano.
4. Dinamica Relativistica: le equazioni di Eulero-Lagrange per i sistemi continui
(campi) sono in LL, Cap.[4], [32], il principio variazionale per le particelle in LL
Cap. [2-3]. Gli studenti devono sapere le equazioni di Eulero-Lagrange, le equazioni
del moto relativistiche per le particelle, le formule per la quantit`a di moto e le-
nergia, le loro formule di trasformazione e il teorema di equivalenza massa-energia.
La formulazione covariante delle equazioni di Maxwell, il campo elettromagneti-
co in relativit`a, le formule di trasformazione, la corrente elettrica, lequazione di
continuit`a, la forza di Lorentz e lequazione del moto per le cariche, la loro deriva-
zione da un principio variazionale, il tutto anche in forma covariante. Le equazioni
fenomenologiche di Minkowski sono facoltative.
5. Tensore energia-impulso: su LL, Cap. [4], c`e tutto per lelettrodinamica. Lo
studente deve sapere la denizione del tensore energia-impulso canonico, il signica-
to sico delle sue componenti, la legge di conservazione, il tensore per i uidi perfetti
e le particelle e come trattare il caso elettromagnetico. Anche Wei, Cap. [2], ore
agganci con largomento.
6. Relativit`a Generale: Wei, i Cap. [3,4,5,6,7] coprono tutto quel che si `e detto a
lezione (e molto di pi` u), tranne la teoria di Nordstrm, che non `e richiesta per lesa-
me. Lo stesso dicasi di Sch. Quindi studiate. Le cose minime da sapere includono
il principio di equivalenza, luguaglianza della massa inerziale e gravitazionale, la
metrica dello spazio-tempo, le forze gravitazionali, cosa sono le geodetiche e il loro
signicato sico, il red-shift e la sua verica sperimentale, il principio di covarianza
generale, qualche esempio di equazione covariante rispetto al gruppo generale di
trasformazioni, il limite newtoniano delle equazioni geodetiche, unidea del tensore
di Riemann e delle equazioni di Einstein quale si pu`o ottenere sul Sch. Se non
sapete o non capirete granche, ma ve la cavate bene con la RS, sar`o soddisfatto.
Per`o provateci.
94
Bibliograa
[1] Neil Ashby, Relativity in the Global Positioning System, Living Rev. Relativity 6,
(2003), 1. URL (cited on date): http://www.livingreviews.org/lrr-2003-1
[2] A. Einstein, The Principle of Relativity, Dover Publications (2000).
[3] B. Schutz, A First Course in General Relativity, Cambridge University Press, 1985.
[4] S. Weinberg, Gravitation and Cosmology: Principles and Applications of the General
Theory of Relativity, Wiley & Sons, 1972.
[5] W. Rindler, Introduction to Special Relativity, Oxford 1981.
[6] L. Landau e E. Lifsitz, The Classical Theory of Fields, IV Ed. 1987, oppure Teoria
dei campi, Editori Riuniti, 1976.
[7] D. F. Lawden, Introduction to Tensor Calculus, Relativity and Cosmology, Dover
Ed. s 1982.
[8] C. Will, Theory and Experiments in Gravitational Physics, Cambridge Revised
Ed. 1993.
[9] W. Panofski & M. Phillips, Classical Electricity and Magnetism, Dover 2
nd
Edition,
1962.
[10] H. P. Robertson, Rev. Mod. Phys. 21, 379 (1949).
[11] R. M. Mansouri and R. U. Sexl, Gen. Rel. Grav. 8, 497 (1977); Gen. Rel. Grav. 8,
515 (1977); Gen. Rel. Grav. 8, 809 (1977).
95
Potrebbero piacerti anche
- Un'Introduzione Alla Teoria Quantistica Dei CampiDocumento59 pagineUn'Introduzione Alla Teoria Quantistica Dei CampivanesppNessuna valutazione finora
- Astrofisica ZaninettiDocumento96 pagineAstrofisica Zaninettialterroses100% (1)
- Fisica Dispense 2012 Politecnico TorinoDocumento242 pagineFisica Dispense 2012 Politecnico Torinogiacomo19Nessuna valutazione finora
- ABC# Guida Alla Programmazione in CsharpDocumento170 pagineABC# Guida Alla Programmazione in CsharpGiuseppe OnorevoliNessuna valutazione finora
- Appunti Meccanica RazionaleDocumento181 pagineAppunti Meccanica RazionaleilmagiconataleNessuna valutazione finora
- Fisica ClassicaDocumento198 pagineFisica ClassicaGiovanni OjanNessuna valutazione finora
- DispensaDocumento230 pagineDispensaborella.m7606Nessuna valutazione finora
- Teoria ModelliDocumento6 pagineTeoria ModellimicantenNessuna valutazione finora
- Tesi Sistemi LineariDocumento25 pagineTesi Sistemi Linearianastasia candeloro100% (1)
- Appunti A&ADocumento152 pagineAppunti A&AGomblotto BotNessuna valutazione finora
- Elio Fabri-Appunti Di Fisica Generale I. 3 (1992)Documento93 pagineElio Fabri-Appunti Di Fisica Generale I. 3 (1992)JJ RodolfoNessuna valutazione finora
- Dispense Algo Stru DatiDocumento92 pagineDispense Algo Stru Datipasci2010Nessuna valutazione finora
- Logica Fuzzy - Storia e Sue Applicazioni (Tesi) PDFDocumento176 pagineLogica Fuzzy - Storia e Sue Applicazioni (Tesi) PDFlorena_fakih01Nessuna valutazione finora
- MONOGRAFIA Calcolo SublimeDocumento127 pagineMONOGRAFIA Calcolo SublimeLuigi MissirocoNessuna valutazione finora
- Appunti Di AlgebraDocumento132 pagineAppunti Di AlgebraAlanNessuna valutazione finora
- A03 9788808254214Documento5 pagineA03 9788808254214HULIOSMELLANessuna valutazione finora
- Introduzione Libro Imparare Le Tabelline Usando Le DitaDocumento8 pagineIntroduzione Libro Imparare Le Tabelline Usando Le DitaElvertNessuna valutazione finora
- Lezioni Di Matematica DiscretaDocumento32 pagineLezioni Di Matematica Discretalucaste50Nessuna valutazione finora
- Staiano Alfredo - Elementi Di Calcolo Numerico Ed Algebra LineareDocumento82 pagineStaiano Alfredo - Elementi Di Calcolo Numerico Ed Algebra LineareDonnell HolmesNessuna valutazione finora
- Appunti Algebra AstrattaDocumento21 pagineAppunti Algebra AstrattaGiovanni RadiciNessuna valutazione finora
- Alberto Maggi - Metodi Matematici Della FisicaDocumento269 pagineAlberto Maggi - Metodi Matematici Della FisicaLorenzo AlsantiNessuna valutazione finora
- Soluzioni A Matematica Discreta - (C) - 2009-464 P. - (Costantino Delizia, Patrizia Longobardi, Mercede Maj, Chiara Nicotera)Documento98 pagineSoluzioni A Matematica Discreta - (C) - 2009-464 P. - (Costantino Delizia, Patrizia Longobardi, Mercede Maj, Chiara Nicotera)gaeNessuna valutazione finora
- Palladino - Geometrie Non EuclideeDocumento47 paginePalladino - Geometrie Non EuclideeEster VigilantiNessuna valutazione finora
- LogaritmiDocumento80 pagineLogaritmiRebecca HayesNessuna valutazione finora
- Algebra - BarbieriDocumento159 pagineAlgebra - BarbieriGiovanni GattoNessuna valutazione finora
- Dalla Fisica Classica Alla Fisica ModernaDocumento90 pagineDalla Fisica Classica Alla Fisica Modernadade1964Nessuna valutazione finora
- Cenni Di Topologia Della Retta RealeDocumento4 pagineCenni Di Topologia Della Retta RealeErasmo ModicaNessuna valutazione finora
- Logica A Informatica Asperti CiabattoniDocumento230 pagineLogica A Informatica Asperti CiabattoniAlfredo Casella100% (1)
- A.A Geometria 2 UNICA. Stefano MontaldoDocumento170 pagineA.A Geometria 2 UNICA. Stefano MontaldoFredrikNessuna valutazione finora
- Circuiti Logici - PolitoDocumento39 pagineCircuiti Logici - PolitoMapleaf HawkinsNessuna valutazione finora
- Lezioni Di Geometria Di Erenziale I - Calcolo Di Erenziale Sulle VarietàDocumento401 pagineLezioni Di Geometria Di Erenziale I - Calcolo Di Erenziale Sulle Varietà_nimbleNessuna valutazione finora
- AlgebraDocumento6 pagineAlgebraalbertoaltieri50% (2)
- Analisi II - Emilio AcerbiDocumento477 pagineAnalisi II - Emilio AcerbiMichelle LettieriNessuna valutazione finora
- Logica A Informatica Asperti CiabattoniDocumento230 pagineLogica A Informatica Asperti CiabattoniFrank MillerNessuna valutazione finora
- Fondamenti Di Automatica - II Parte PDFDocumento160 pagineFondamenti Di Automatica - II Parte PDFalinaauliNessuna valutazione finora
- Appunti Di Serie StoricheDocumento168 pagineAppunti Di Serie StoricheFrancesca MNessuna valutazione finora
- TeoremaPitagora TriangoloRettangolo Intermediate UbiMathDocumento29 pagineTeoremaPitagora TriangoloRettangolo Intermediate UbiMathSilvia ScanduraNessuna valutazione finora
- Messaggi e ComunicazioneDocumento329 pagineMessaggi e ComunicazioneOscar BettelliNessuna valutazione finora
- Teoria Delle Stringhe RT2017Documento10 pagineTeoria Delle Stringhe RT2017Rosario TurcoNessuna valutazione finora
- Spazi Vettoriali I v1.11Documento195 pagineSpazi Vettoriali I v1.11ßlueNessuna valutazione finora
- Algebra Astratta Strutture Algebriche Proprietà Fondamentali PDFDocumento10 pagineAlgebra Astratta Strutture Algebriche Proprietà Fondamentali PDFmarcoNessuna valutazione finora
- Appunti Mattoccia Calcolatori Elettronici T Unibo 2013-2014Documento68 pagineAppunti Mattoccia Calcolatori Elettronici T Unibo 2013-2014Sun Wen-LongNessuna valutazione finora
- Il Principio Di InduzioneDocumento6 pagineIl Principio Di InduzionebarontoNessuna valutazione finora
- Algebra Lineare e Geometria EuclideaDocumento219 pagineAlgebra Lineare e Geometria Euclideadilanean1492Nessuna valutazione finora
- Esercizi Svolti MQDocumento124 pagineEsercizi Svolti MQGiuvann Sugnu IuNessuna valutazione finora
- (Appunti - Lecture Notes, 10) Ambrosio L., Da Prato G., Mennucci A. - Introduction To Measure Theory and Integration-Edizioni Della Normale (2011)Documento193 pagine(Appunti - Lecture Notes, 10) Ambrosio L., Da Prato G., Mennucci A. - Introduction To Measure Theory and Integration-Edizioni Della Normale (2011)Cristhian Paúl Neyra SalvadorNessuna valutazione finora
- La Logica Matematica Dopo GödelDocumento13 pagineLa Logica Matematica Dopo GödelGiuseppe RaguníNessuna valutazione finora
- ABC# Guida Alla Programmazione v1-1Documento163 pagineABC# Guida Alla Programmazione v1-1g.monaciNessuna valutazione finora
- Statistica: Teoria e test per concorsi pubblici e esami univeristariDa EverandStatistica: Teoria e test per concorsi pubblici e esami univeristariNessuna valutazione finora
- Mason Relativita Generale PDFDocumento188 pagineMason Relativita Generale PDFRoberto DemariaNessuna valutazione finora
- Relatività Generale - Mason PDFDocumento188 pagineRelatività Generale - Mason PDFOsolemio MerNessuna valutazione finora
- Lezioni Meccanica RazionaleDocumento229 pagineLezioni Meccanica RazionaleDanilo InfantinoNessuna valutazione finora
- Dispense Lab IIDocumento217 pagineDispense Lab IIChristian L'importanteèloslapsulbasso DioguardiNessuna valutazione finora
- RadiazioneDocumento300 pagineRadiazionetictac4136063Nessuna valutazione finora
- Elio Fabri - CosmologiaDocumento195 pagineElio Fabri - CosmologiaRiccardo CastellaniNessuna valutazione finora
- Mecc SupDocumento103 pagineMecc SupANDREA TALAMONTINessuna valutazione finora
- Scheda Mircea Eliade EsotericoDocumento1 paginaScheda Mircea Eliade EsotericosbradlyonNessuna valutazione finora
- Harmonices MundiDocumento2 pagineHarmonices MundiSteveDFNessuna valutazione finora
- F. Olivetti - Paul Ludwig Landsberg PDFDocumento510 pagineF. Olivetti - Paul Ludwig Landsberg PDFAnonymous 28AYvphsTfNessuna valutazione finora
- Gianni Silei, La Previdenza Tra Interventismo Statale e Iniziativa PrivataDocumento8 pagineGianni Silei, La Previdenza Tra Interventismo Statale e Iniziativa PrivataGianni SileiNessuna valutazione finora
- Sergio Segantini - Dormi Dormi PiccolinoDocumento76 pagineSergio Segantini - Dormi Dormi PiccolinoLeoNessuna valutazione finora
- Impianti Acqua AlimentazioneDocumento18 pagineImpianti Acqua Alimentazionebosnia76Nessuna valutazione finora
- AlcoliDocumento21 pagineAlcoliDomenico PetruzziNessuna valutazione finora
- Fisica AduniDocumento48 pagineFisica AduniJP VdlcNessuna valutazione finora
- Materialismo HistoricoDocumento13 pagineMaterialismo HistoricoAmiGuzmánNessuna valutazione finora
- Curt Paul Janz Vita Di Nietzsche III Parte1 ItalianoDocumento251 pagineCurt Paul Janz Vita Di Nietzsche III Parte1 ItalianoJean Paul PNessuna valutazione finora
- Stelle 11 Alta PDFDocumento2 pagineStelle 11 Alta PDFRoberto FioccoNessuna valutazione finora
- Kluberfluid C-F 3 ULTRADocumento2 pagineKluberfluid C-F 3 ULTRAseegnaNessuna valutazione finora