Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Tuning Equation of State ModelsDocumento34 pagineTuning Equation of State Modelswelltest vspNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- C680Documento22 pagineC680dinhtung2210100% (2)
- Load CalculationsDocumento5 pagineLoad Calculationsarif_rubinNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Biological Effect and Medical Applications of Electromagnetic EnergyDocumento580 pagineBiological Effect and Medical Applications of Electromagnetic EnergyTienRienNessuna valutazione finora
- CO2-Reducing Cement Based On Calcium SilicatesDocumento9 pagineCO2-Reducing Cement Based On Calcium Silicatesyinglv100% (1)
- Osborne Reynolds Experiment Flow RegimesDocumento6 pagineOsborne Reynolds Experiment Flow RegimesJayasanka33% (3)
- Fastners Modeling For MSC - Nastran Finite Element AnalysisDocumento20 pagineFastners Modeling For MSC - Nastran Finite Element Analysisabo029Nessuna valutazione finora
- Joint Design For Reinforced Concrete Buildings: P Ei ErDocumento79 pagineJoint Design For Reinforced Concrete Buildings: P Ei ErSergey MatyuninNessuna valutazione finora
- The Vis-Viva Equation Reveals Satellite Speed from Orbital PositionDocumento1 paginaThe Vis-Viva Equation Reveals Satellite Speed from Orbital Positionsami_ben11Nessuna valutazione finora
- Direct Shear Test ResultsDocumento19 pagineDirect Shear Test ResultsAh Gus100% (9)
- Computational Physics Using MATLABDocumento103 pagineComputational Physics Using MATLABDini Fakhriza A67% (6)
- Cement Chapter 4Documento11 pagineCement Chapter 4shani5573100% (2)
- Cylinders Shall Be Produced As Per IS 7285 and Approved by Chief Controller of ExplosiveDocumento1 paginaCylinders Shall Be Produced As Per IS 7285 and Approved by Chief Controller of ExplosiveAlanka Prasad100% (1)
- Liquid Liquid SeparatorsDocumento26 pagineLiquid Liquid SeparatorsAjay Pratap SinghNessuna valutazione finora
- Tos Mathematics 8 q2Documento1 paginaTos Mathematics 8 q2Kenny Ann Grace BatiancilaNessuna valutazione finora
- Mijlocul Cerului in SinastrieDocumento2 pagineMijlocul Cerului in SinastrieKali KaliNessuna valutazione finora
- Young ThesisDocumento128 pagineYoung ThesisMuhammad Ishaq KhanNessuna valutazione finora
- RocketDocumento64 pagineRocketmksayshiNessuna valutazione finora
- Handout 4: Root Locus Review: Eric FeronDocumento4 pagineHandout 4: Root Locus Review: Eric Feronpride3351Nessuna valutazione finora
- Space Vehicle Design: Second EditionDocumento5 pagineSpace Vehicle Design: Second Editionpride3351Nessuna valutazione finora
- 20f12 HohmannDocumento34 pagine20f12 Hohmannpride3351Nessuna valutazione finora
- 2001-Carrico-Sun-Mars Libration Points and Mars Mission SimulationsDocumento0 pagine2001-Carrico-Sun-Mars Libration Points and Mars Mission Simulationspride3351Nessuna valutazione finora
- NozzlesDocumento57 pagineNozzlesSindhu Jangam100% (2)
- Naca Report 933 PDFDocumento9 pagineNaca Report 933 PDFpride3351Nessuna valutazione finora
- Solar SailsDocumento26 pagineSolar Sailspride3351Nessuna valutazione finora
- 0510 WeaponsDocumento22 pagine0510 Weaponspride3351Nessuna valutazione finora
- Lunar AnalysisDocumento32 pagineLunar Analysistruman1723Nessuna valutazione finora
- Grade 7 Science Lesson on SpacecraftDocumento2 pagineGrade 7 Science Lesson on Spacecraftpride3351Nessuna valutazione finora
- 4T12 Project Feasibility Study Guideline v4-0Documento16 pagine4T12 Project Feasibility Study Guideline v4-0azharjalilNessuna valutazione finora
- 0401 CorreaDocumento10 pagine0401 Correapride3351Nessuna valutazione finora
- 483F12L04 OrbmechDocumento52 pagine483F12L04 Orbmechpride3351Nessuna valutazione finora
- 441 Lecture 20Documento24 pagine441 Lecture 20pride3351Nessuna valutazione finora
- .:: Astrill Error ::. &NBSP Socket Error # 10053 Software Caused Connection Abort. What Can You Do To Solve The Error: Try To Switch To Another Server If The Error Persists.Documento36 pagine.:: Astrill Error ::. &NBSP Socket Error # 10053 Software Caused Connection Abort. What Can You Do To Solve The Error: Try To Switch To Another Server If The Error Persists.franz_passariniNessuna valutazione finora
- 09feb AAS 09-227 EndgameBDocumento20 pagine09feb AAS 09-227 EndgameBpride3351Nessuna valutazione finora
- 03 Hardy FreeVehicleDesignDocumento3 pagine03 Hardy FreeVehicleDesignMuhammad Ishaq KhanNessuna valutazione finora
- 2D Fixed DV TransferDocumento7 pagine2D Fixed DV Transferpride3351Nessuna valutazione finora
- 98 RLVDocumento50 pagine98 RLVpride3351Nessuna valutazione finora
- 6Documento6 pagine6pride3351Nessuna valutazione finora
- Appendix A20 Lecture2036 022-12-2011Documento25 pagineAppendix A20 Lecture2036 022-12-2011Chegrani AhmedNessuna valutazione finora
- CFDDocumento133 pagineCFDpride3351Nessuna valutazione finora
- Basics of Propellers - by Master Air ScrewsDocumento2 pagineBasics of Propellers - by Master Air Screwspelosi_fNessuna valutazione finora
- MIT16 50S12 Sol1Documento5 pagineMIT16 50S12 Sol1pride3351Nessuna valutazione finora
- Understanding The 914 RotaxDocumento15 pagineUnderstanding The 914 Rotaxpride3351Nessuna valutazione finora
- CE 470-Lect-3 (Analysis of Biaxially Loaded Columns) (Read-Only)Documento22 pagineCE 470-Lect-3 (Analysis of Biaxially Loaded Columns) (Read-Only)Jamal RkhNessuna valutazione finora
- G.D.GOENKA PUBLIC SCHOOL CLASS 10 CHEMISTRY CHAPTER 2 ACIDS BASES SALTS ASSIGNMENTDocumento3 pagineG.D.GOENKA PUBLIC SCHOOL CLASS 10 CHEMISTRY CHAPTER 2 ACIDS BASES SALTS ASSIGNMENTvikas aggarwal100% (1)
- Data Kabel HoistDocumento1 paginaData Kabel HoistAchmad FernandezNessuna valutazione finora
- The role of root canal fillings in endodontic successDocumento9 pagineThe role of root canal fillings in endodontic successYassir MudharNessuna valutazione finora
- History of Buckling of ColumnDocumento10 pagineHistory of Buckling of ColumnSorin Viorel CrainicNessuna valutazione finora
- Calcul Evaltn-Embankments Reinforced With geocells-FEM-2015Documento14 pagineCalcul Evaltn-Embankments Reinforced With geocells-FEM-2015Rakesh KapoorNessuna valutazione finora
- Cracking Moment Analysis of Prestressed Concrete BeamDocumento18 pagineCracking Moment Analysis of Prestressed Concrete Beamharshil gandhiNessuna valutazione finora
- Computer Graphics and AnimationDocumento2 pagineComputer Graphics and AnimationManoj PrasadNessuna valutazione finora
- How retinal adaptation maintains visual perception despite illumination changesDocumento1 paginaHow retinal adaptation maintains visual perception despite illumination changesAkicaNessuna valutazione finora
- A AjouterDocumento3 pagineA Ajouter00JoNessuna valutazione finora
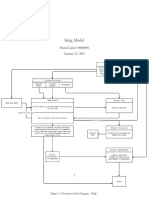
- Ising ModelDocumento5 pagineIsing Modeldecerto252Nessuna valutazione finora
- Experiment #2: Continuous-Time Signal Representation I. ObjectivesDocumento14 pagineExperiment #2: Continuous-Time Signal Representation I. ObjectivesMarvin AtienzaNessuna valutazione finora
- Newtons Law of MotionDocumento14 pagineNewtons Law of MotionJohn Irvin M. AbatayNessuna valutazione finora
- Atomic TheoryDocumento2 pagineAtomic TheorybabeNessuna valutazione finora
- Math II Tutorial 1Documento2 pagineMath II Tutorial 1devang_siNessuna valutazione finora
- ACET208 Theodolite PresentationDocumento6 pagineACET208 Theodolite Presentationsilverm_4Nessuna valutazione finora