Potrebbero piacerti anche
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Tut5 DCDocumento17 pagineTut5 DCGagan ChopraNessuna valutazione finora
- Systemc For Embedded System Design: Seminar Embedded Systems (Ws 06/07)Documento11 pagineSystemc For Embedded System Design: Seminar Embedded Systems (Ws 06/07)Gagan ChopraNessuna valutazione finora
- Untimed Timed TLMDocumento25 pagineUntimed Timed TLMGagan ChopraNessuna valutazione finora
- SystemC SchusterDocumento18 pagineSystemC SchusterGagan ChopraNessuna valutazione finora
- UART Wishbone SpecDocumento20 pagineUART Wishbone SpecSandeep Thakur100% (1)
- Systemverilog RTL Tutorial: New OperatorsDocumento3 pagineSystemverilog RTL Tutorial: New OperatorsGagan ChopraNessuna valutazione finora
- TUTORIAL SystemC With Microsoft Visual StudioDocumento11 pagineTUTORIAL SystemC With Microsoft Visual StudioGagan ChopraNessuna valutazione finora
- User Guide 20Documento212 pagineUser Guide 20Gagan ChopraNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Lorma Scope of WorkDocumento2 pagineLorma Scope of WorkJb TiscubNessuna valutazione finora
- ROLAN BART Zadovoljstvo U TekstuDocumento56 pagineROLAN BART Zadovoljstvo U Tekstujokokokl100% (18)
- Concurrent Manager ConceptDocumento9 pagineConcurrent Manager Conceptnikhil_cs_08Nessuna valutazione finora
- Finite Element and Theoretical Investigations On PVC-CFRP Confined Concrete Columns Under Axial CompressionDocumento42 pagineFinite Element and Theoretical Investigations On PVC-CFRP Confined Concrete Columns Under Axial CompressionShaker QaidiNessuna valutazione finora
- Constructing A Project PlanDocumento2 pagineConstructing A Project Planmariz angel d dagodogNessuna valutazione finora
- Adendo Catalogo Easytech IngDocumento15 pagineAdendo Catalogo Easytech IngTim SmytheNessuna valutazione finora
- Acumuladores de AP Atlas CopcoDocumento32 pagineAcumuladores de AP Atlas CopcovictorhernandezregaNessuna valutazione finora
- Who Am I MemoDocumento2 pagineWho Am I Memoapi-652685391Nessuna valutazione finora
- PDFDocumento764 paginePDFDe JavuNessuna valutazione finora
- Pip Delete This DirectoryDocumento1 paginaPip Delete This DirectoryAnurag SemwalNessuna valutazione finora
- Multilevel Viewpoint of A MachineDocumento4 pagineMultilevel Viewpoint of A MachineDikshikaAryaNessuna valutazione finora
- Building DesignDocumento68 pagineBuilding DesignRafael Lemos100% (1)
- Module 2.1 Cultural Relativism-1Documento20 pagineModule 2.1 Cultural Relativism-1Blad AnneNessuna valutazione finora
- MR - Mentoring EE Educators Towards PEEEngr. Cirilo Calibjo Nov. 27 2015Documento74 pagineMR - Mentoring EE Educators Towards PEEEngr. Cirilo Calibjo Nov. 27 2015ramelNessuna valutazione finora
- The Old Ossetic Inscription From The River Zelenčuk,: Achtung!Documento4 pagineThe Old Ossetic Inscription From The River Zelenčuk,: Achtung!gippertNessuna valutazione finora
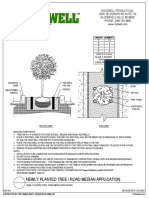
- Newly Planted Tree / Road Median ApplicationDocumento1 paginaNewly Planted Tree / Road Median ApplicationmooolkaNessuna valutazione finora
- Primary School: Literature Review & Case StudyDocumento89 paginePrimary School: Literature Review & Case StudySresta100% (1)
- BPMDocumento3 pagineBPMarunsawaiyanNessuna valutazione finora
- Writing ProposalsDocumento100 pagineWriting ProposalsSaad Motawéa50% (2)
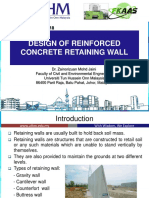
- Chapter 5.0.2018 - Retaining WallDocumento36 pagineChapter 5.0.2018 - Retaining WallHawaiiChongNessuna valutazione finora
- 20110715122354-B SC - M SC - H S - Mathematics PDFDocumento75 pagine20110715122354-B SC - M SC - H S - Mathematics PDFn0% (1)
- Xie-Ye Polymerization CatalysisDocumento47 pagineXie-Ye Polymerization CatalysisjasvindersinghsagguNessuna valutazione finora
- Fmparente Erftc Porto 20090605Documento78 pagineFmparente Erftc Porto 20090605ChiefpereraNessuna valutazione finora
- Finding The Right Materials ESPDocumento8 pagineFinding The Right Materials ESPEdison Dela Cruz Jr.100% (1)
- Elastic CollisionDocumento1 paginaElastic CollisionTeo Hui pingNessuna valutazione finora
- Condition Monitoring of Pumps - How To Save Three Ways: Session OneDocumento35 pagineCondition Monitoring of Pumps - How To Save Three Ways: Session OneJorge FracaroNessuna valutazione finora
- Examples V4.1 PDFDocumento39 pagineExamples V4.1 PDFgerNessuna valutazione finora
- Aravindhan PT CV CSWIP TrainerDocumento4 pagineAravindhan PT CV CSWIP TrainerGanesan RamamoorthyNessuna valutazione finora
- Bushman 2005Documento8 pagineBushman 2005SOULAIMANE EZZOUINENessuna valutazione finora
- Master SteelDocumento5.118 pagineMaster Steelsabiutayo100% (3)