Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Planning For Information NetworkDocumento32 paginePlanning For Information NetworkChandraAdsenubiiNessuna valutazione finora
- 01-19 Diagnostic Trouble Code Table PDFDocumento40 pagine01-19 Diagnostic Trouble Code Table PDFmefisto06cNessuna valutazione finora
- Libeskind Daniel - Felix Nussbaum MuseumDocumento6 pagineLibeskind Daniel - Felix Nussbaum MuseumMiroslav MalinovicNessuna valutazione finora
- CST 336 Final Project Computown DocumentationDocumento12 pagineCST 336 Final Project Computown Documentationapi-461214598Nessuna valutazione finora
- Data Structure Algorithm Using C PresentationDocumento245 pagineData Structure Algorithm Using C PresentationdhruvwNessuna valutazione finora
- Properties of Building Materials and Their Importance in ConstructionDocumento5 pagineProperties of Building Materials and Their Importance in ConstructionDaisy Jane LulabNessuna valutazione finora
- CP 001 - 18 - PP - Eng - 00 - CP Umk450t (2018) 18VR5K01 (Eng)Documento52 pagineCP 001 - 18 - PP - Eng - 00 - CP Umk450t (2018) 18VR5K01 (Eng)Honda almagrorepuestosNessuna valutazione finora
- Brochure FDP - EG 16.08.2021-1-2-2Documento3 pagineBrochure FDP - EG 16.08.2021-1-2-2sri sivaNessuna valutazione finora
- 031 - Btech - 08 Sem PDFDocumento163 pagine031 - Btech - 08 Sem PDFtushant_juneja3470Nessuna valutazione finora
- Strength of Materials Basics and Equations - Mechanics of Materials - Engineers EdgeDocumento6 pagineStrength of Materials Basics and Equations - Mechanics of Materials - Engineers EdgeansarNessuna valutazione finora
- PSP Error CodesDocumento5 paginePSP Error CodesAd AzNessuna valutazione finora
- Advanced Lathe Milling Report Batch 2Documento3 pagineAdvanced Lathe Milling Report Batch 2Tony SutrisnoNessuna valutazione finora
- 9C606C.64 To 65Documento24 pagine9C606C.64 To 65SHIRISHA YADAVNessuna valutazione finora
- SP-2069 Specification For Pressure VesselsDocumento68 pagineSP-2069 Specification For Pressure Vesselsarjunprasannan7Nessuna valutazione finora
- 1450 01 Air Hoists and Trolleys Atlas CopcoDocumento12 pagine1450 01 Air Hoists and Trolleys Atlas Copcomohammed shammiNessuna valutazione finora
- Cane - Sugar - Manufacture - in - India Datos Sobre Producción de AzucarDocumento525 pagineCane - Sugar - Manufacture - in - India Datos Sobre Producción de AzucarEnrique Lucero100% (1)
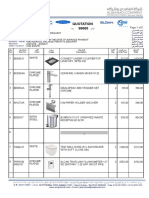
- Quotation 98665Documento5 pagineQuotation 98665Reda IsmailNessuna valutazione finora
- Activa NewDocumento160 pagineActiva NewSiddharth Jain100% (1)
- VX-1700 Owners ManualDocumento32 pagineVX-1700 Owners ManualVan ThaoNessuna valutazione finora
- Research Papers in Mechanical Engineering Free Download PDFDocumento4 pagineResearch Papers in Mechanical Engineering Free Download PDFtitamyg1p1j2Nessuna valutazione finora
- Seismic Design & Installation Guide: Suspended Ceiling SystemDocumento28 pagineSeismic Design & Installation Guide: Suspended Ceiling SystemhersonNessuna valutazione finora
- p2714 Opel 6t45Documento5 paginep2714 Opel 6t45Валентин ДNessuna valutazione finora
- Drying AgentDocumento36 pagineDrying AgentSo MayeNessuna valutazione finora
- SuperOhm 3754 (3748-11) - Technical Data Sheet - ECC - Rev 2 - 2016-09Documento2 pagineSuperOhm 3754 (3748-11) - Technical Data Sheet - ECC - Rev 2 - 2016-09igor brocaNessuna valutazione finora
- Session PlanDocumento11 pagineSession PlanMat Domdom Sansano100% (1)
- VG H4connectorsDocumento7 pagineVG H4connectorsJeganeswaranNessuna valutazione finora
- RSA Code in JavaDocumento3 pagineRSA Code in Javadeepak00707Nessuna valutazione finora
- A Mesh-Free Solid-Mechanics ApproachDocumento26 pagineA Mesh-Free Solid-Mechanics ApproachMustafa YildizNessuna valutazione finora
- 1504805126-HPI - CR-Series Copper Crusher - 04-2021ENDocumento1 pagina1504805126-HPI - CR-Series Copper Crusher - 04-2021ENCaio BittencourtNessuna valutazione finora
- Longitudinal Section Cross Section of AbutmentDocumento1 paginaLongitudinal Section Cross Section of AbutmentMATHANNessuna valutazione finora