Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Us Intel WikileaksDocumento34 pagineUs Intel WikileaksGaetano Zappulla100% (2)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Hamas and The Terrorist Threat From The Gaza Strip. The Main Findings of The Goldstone Report Versus The Factual FindingsDocumento349 pagineHamas and The Terrorist Threat From The Gaza Strip. The Main Findings of The Goldstone Report Versus The Factual FindingsGaetano ZappullaNessuna valutazione finora
- Risk Assessment For Harmonic Measurement Study ProcedureDocumento13 pagineRisk Assessment For Harmonic Measurement Study ProcedureAnandu AshokanNessuna valutazione finora
- Catalog NeosetDocumento173 pagineCatalog NeosetCarmen Draghia100% (1)
- Daily Lesson Log (English)Documento8 pagineDaily Lesson Log (English)Julius Baldivino88% (8)
- China Spy 20091022Documento88 pagineChina Spy 20091022debgage100% (1)
- Tree Based Machine Learning Algorithms Decision Trees Random Forests and Boosting B0756FGJCPDocumento109 pagineTree Based Machine Learning Algorithms Decision Trees Random Forests and Boosting B0756FGJCPJulio Davalos Vasquez100% (1)
- Phase DiagramDocumento3 paginePhase DiagramTing TCNessuna valutazione finora
- Libro INGLÉS BÁSICO IDocumento85 pagineLibro INGLÉS BÁSICO IRandalHoyos100% (1)
- Pedagogical Leadership. Baird - CoughlinDocumento5 paginePedagogical Leadership. Baird - CoughlinChyta AnindhytaNessuna valutazione finora
- Measuring The Cost of CybercrimeDocumento31 pagineMeasuring The Cost of CybercrimeGaetano ZappullaNessuna valutazione finora
- Al-Qaeda Master Narratives and Affiliate Case Studies: Al-Qaeda in The Arabian Peninsula and Al-Qaeda in The Islamic MaghrebDocumento48 pagineAl-Qaeda Master Narratives and Affiliate Case Studies: Al-Qaeda in The Arabian Peninsula and Al-Qaeda in The Islamic MaghrebGaetano ZappullaNessuna valutazione finora
- USCC Report Chinese Capabilities For Computer Network Operations and Cyber EspionageDocumento136 pagineUSCC Report Chinese Capabilities For Computer Network Operations and Cyber EspionageGaetano ZappullaNessuna valutazione finora
- How China Is Blocking TorDocumento21 pagineHow China Is Blocking TorGaetano ZappullaNessuna valutazione finora
- USCC Report Chinese Capabilities For Computer Network Operations and Cyber EspionageDocumento136 pagineUSCC Report Chinese Capabilities For Computer Network Operations and Cyber EspionageGaetano ZappullaNessuna valutazione finora
- The Euro Area Adjustment-About Half-Way ThereDocumento16 pagineThe Euro Area Adjustment-About Half-Way ThereGlinta CataNessuna valutazione finora
- Gold and The International Monetary SysteDocumento50 pagineGold and The International Monetary SysteGaetano ZappullaNessuna valutazione finora
- Ex-Spy Testifies in Mubarak TrialDocumento1 paginaEx-Spy Testifies in Mubarak TrialGaetano ZappullaNessuna valutazione finora
- China's Economic Espionage ProwessDocumento6 pagineChina's Economic Espionage ProwessAryan AgnihotriNessuna valutazione finora
- Varieties of Capitalist Debates: How Institutions Shape Public Con Icts On Economic Liberalization in The U.K., France, and GermanyDocumento37 pagineVarieties of Capitalist Debates: How Institutions Shape Public Con Icts On Economic Liberalization in The U.K., France, and GermanyGaetano ZappullaNessuna valutazione finora
- Andreotti-Thatcher Il Dossier Dagli Archivi Segreti InglesiDocumento108 pagineAndreotti-Thatcher Il Dossier Dagli Archivi Segreti InglesiGaetano ZappullaNessuna valutazione finora
- Media Piracy in Emerging EconomiesDocumento440 pagineMedia Piracy in Emerging EconomiesGaetano Zappulla100% (2)
- Science of Cyber-SecurityDocumento86 pagineScience of Cyber-SecurityGaetano Zappulla100% (1)
- UntitledDocumento1 paginaUntitledGaetano ZappullaNessuna valutazione finora
- The Point of No ReturnDocumento16 pagineThe Point of No ReturnGaetano ZappullaNessuna valutazione finora
- Security and Africa's First World CupDocumento10 pagineSecurity and Africa's First World CupGaetano ZappullaNessuna valutazione finora
- Zen and The Art of Collecting and Analyzing MalwareDocumento52 pagineZen and The Art of Collecting and Analyzing MalwareGaetano ZappullaNessuna valutazione finora
- EU Counterterrorism Strategy: Value Added or Chimera?Documento17 pagineEU Counterterrorism Strategy: Value Added or Chimera?Gaetano ZappullaNessuna valutazione finora
- Echelon Report English.Documento194 pagineEchelon Report English.Moss3113Nessuna valutazione finora
- Jihadists and The InternetDocumento51 pagineJihadists and The InternetGaetano ZappullaNessuna valutazione finora
- Compromising Tor Anonymity Exploiting P2P Information LeakageDocumento10 pagineCompromising Tor Anonymity Exploiting P2P Information LeakageGaetano Zappulla100% (1)
- The "Marco Polo" Effect: Chinese FDI in ItalyDocumento27 pagineThe "Marco Polo" Effect: Chinese FDI in ItalyGaetano ZappullaNessuna valutazione finora
- Sim Educ101Documento101 pagineSim Educ101Rolando AmadNessuna valutazione finora
- Introduction To SCRDocumento19 pagineIntroduction To SCRAlbin RobinNessuna valutazione finora
- Warning: Shaded Answers Without Corresponding Solution Will Incur Deductive PointsDocumento1 paginaWarning: Shaded Answers Without Corresponding Solution Will Incur Deductive PointsKhiara Claudine EspinosaNessuna valutazione finora
- Time Table & Instruction For Candidate - Faculty of Sci & TechDocumento3 pagineTime Table & Instruction For Candidate - Faculty of Sci & TechDeepshikha Mehta joshiNessuna valutazione finora
- Barack ObamaDocumento3 pagineBarack ObamaVijay KumarNessuna valutazione finora
- Xii - STD - Iit - B1 - QP (19-12-2022) - 221221 - 102558Documento13 pagineXii - STD - Iit - B1 - QP (19-12-2022) - 221221 - 102558Stephen SatwikNessuna valutazione finora
- Ahmed Amr P2Documento8 pagineAhmed Amr P2Ahmed AmrNessuna valutazione finora
- Aerated Concrete Production Using Various Raw MaterialsDocumento5 pagineAerated Concrete Production Using Various Raw Materialskinley dorjee100% (1)
- Postmodernism in Aha! MovieDocumento2 paginePostmodernism in Aha! MovieSayma AkterNessuna valutazione finora
- Identification of PolymersDocumento11 pagineIdentification of PolymersßraiñlĕsšȜĭnšteĭñNessuna valutazione finora
- DC Motor: F Bli NewtonDocumento35 pagineDC Motor: F Bli NewtonMuhammad TausiqueNessuna valutazione finora
- 13 SK Kader Pendamping PGSDocumento61 pagine13 SK Kader Pendamping PGSrachman ramadhanaNessuna valutazione finora
- FmatterDocumento12 pagineFmatterNabilAlshawish0% (2)
- Bearing TypesDocumento5 pagineBearing TypesWayuNessuna valutazione finora
- Power-Miser 12 Water Heater ManualDocumento32 paginePower-Miser 12 Water Heater ManualClaudeVanDammNessuna valutazione finora
- Machine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDocumento26 pagineMachine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDull PersonNessuna valutazione finora
- Review Rachna WasteDocumento9 pagineReview Rachna WasteSanjeet DuhanNessuna valutazione finora
- Overview of MEMDocumento5 pagineOverview of MEMTudor Costin100% (1)
- Anth 09 3 247 07 386 Yadav V S TTDocumento3 pagineAnth 09 3 247 07 386 Yadav V S TTShishir NigamNessuna valutazione finora
- TOA Project Presentation (GROUP 5)Documento22 pagineTOA Project Presentation (GROUP 5)Khadija ShahidNessuna valutazione finora
- Frequency Polygons pdf3Documento7 pagineFrequency Polygons pdf3Nevine El shendidyNessuna valutazione finora
- Placa 9 - SHUTTLE A14RV08 - 71R-A14RV4-T840 - REV A0 10ABR2012Documento39 paginePlaca 9 - SHUTTLE A14RV08 - 71R-A14RV4-T840 - REV A0 10ABR2012Sergio GalliNessuna valutazione finora
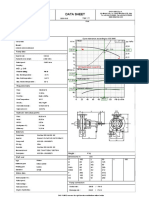
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Documento3 pagineData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaNessuna valutazione finora